电液伺服随机振动控制系统非线性建模与仿真
2020-06-09付波谢安桓赵春宇周华
付波, 谢安桓, 赵春宇, 周华
(1.浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州 310027;2.之江实验室,浙江 杭州 311121)
随机振动是自然界较为常见的现象,如大气湍流对飞机的影响、海浪波动对船舶的冲击、地震等,这些振动环境对设备的正常工作影响很大,通过振动环境模拟,可在设备正式应用前对其可靠性和疲劳寿命进行考察,提前预防可能出现的失效问题. 电液伺服系统由于其控制精度高、响应速度快、承载能力强等特点,而可作为振动设备模拟振动环境.
随机振动包括随机波形再现和功率谱再现,前者可在时域上再现随机波形,后者可在短时间内同时激发出具有特定PSD的宽频带随机振动,能模拟连续平稳的随机信号,更为常见. 因此围绕要求的参考加速度PSD,本文研究了电液伺服系统的随机振动控制特性.
电液伺服振动控制系统一般由伺服控制器和振动控制器组成. 伺服控制常采用三参量控制[1],通过极点配置拓展系统频宽. 由于系统广泛存在非线性、频宽不高等问题,固定增益控制器不能较好追踪参考输入信号,因此关于非线性补偿研究得到人们重视. 其补偿方法主要有最小控制合成法[2]、自适应逆控制[3]、SDRE技术[4]等. 线性二次调节器(linear quadratic regulator,LQR)在汽车控制等领域得到了广泛的应用[5],基于其原理发展的SDRE技术[6]具有简洁设计流程,可使系统获得较好稳定性和频响特性. 振动控制器则在频域上对信号进行均衡修正,弥补伺服控制的不足. 均衡控制方法主要有线性均衡算法[7]、X滤波LMS算法[8]、基于Kalman滤波自适应控制算法等[9]. 后两者均衡算法虽有助于减小噪声干扰、提高均衡速率,但需考虑系统稳定性,且实现较复杂. 因此本文仅采用较为通用线性均衡算法,并结合SDRE技术来再现参考加速度PSD.
1 SDRE技术
假设全状态可观非线性系统表达为
y=Cx(t).
(1)
无限时间性能泛函J定义为
(2)
式中:权矩阵Q、R为正定矩阵:e(t)为误差向量,有e(t)=yr(t)-y(t);yr(t)为参考信号. SDRE技术则求解使性能泛函J最小的优化控制输入u(t),流程如下[9]:
① 将系统表达为含状态依赖系数(state-dependent coefficient, SDC)矩阵形式

(3)
② 在线求解SDRE
P(x)A(x)+AT(x)P(x)+CTQC-
P(x)B(x)R-1BT(x)P(x)=0,
(4)
式中P(x)为Riccati方程唯一对称正定解.
③ 计算优化控制输入
u(x)=R-1(x)BT(x)[g(x)-P(x)x].
(5)
其中反馈调节器K(x)=R-1BT(x)P(x),前馈滤波器G=R-1BT(x)g(x),且g(x)满足
[P(x)B(x)R-1BT(x)-AT(x)]g(x)=CTQ(x)yr.
(6)
2 数学模型
电液伺服系统中广泛存在压力流量特性、伺服阀控制死区等非线性因素,为准确实现5~500 Hz频宽范围加速度随机振动控制,建立系统非线性模型.
液压缸和负载的力平衡方程如下(忽略摩擦):
(7)
式中:Ap为液压缸活塞有效面积;pL为系统工作压力;mt为质量负载;xp为液压缸活塞位置;Bp为阻尼负载;K为弹性负载.
液压缸流量连续性方程为
(8)
式中:qL为伺服阀流量;xv为伺服阀阀芯位移;sgn(x)为取x符号函数;DZ(xv)为死区函数,表达式为
(9)
式中:Cd为流量系数;W为面积梯度;xvn和xvp为死区范围;ρ为流体密度;ps为供油压力.
伺服阀动态特性方程为
(10)
式中:ωv为伺服阀固有频率;ξ为伺服阀阻尼比;Kxv为伺服阀增益;Ka为放大器增益;u为伺服阀输入电压.
由式(7)~(10),将系统表示为含SDC矩阵形式的状态空间方程:
y=Cx.
(11)


C为输出矩阵,C=[10000];
A(x)为状态矩阵,
其中状态依赖Δ表达为
本文采用Hamiltonian矩阵Schur分解法[10]来实时求解代数Riccati方程,且Matlab中有相应工具函数“care”. 假设矩阵P(x)、g、Q和R分别表示为
Q=q,R=1.
由求解的P(x)可得优化输入中反馈调节器K(x)为

由式(4)和(6)可得前馈滤波器

综上优化控制输入u(t)为
(12)
3 系统动态特性分析
在Simulink中建立系统仿真模型,如图1所示,伺服阀、液压缸、负载的主要参数设置如表1所示.
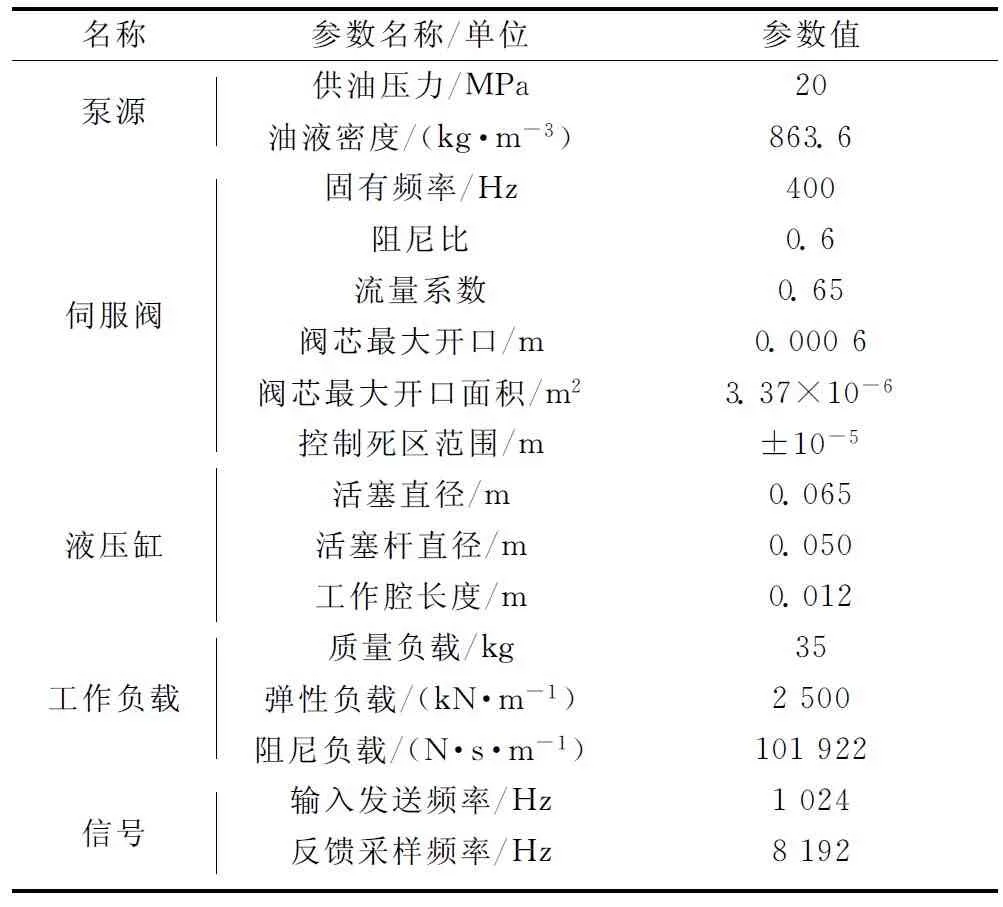
表1 仿真模型主要参数
对权矩阵Q中权系数q取不同值,将低量级高斯白噪声信号作为输入信号,通过自动步长LMS法[11]辨识系统传递函数,从而获得幅频宽(-3 dB)大小(如表2所示),由于非线性因素,每次辨识的幅频宽存在差异,但整体上随着q的增加呈增大趋势. 但当权系数q≥25×106时,阶跃响应存在超调,为使系统稳定,q取q≤16×106,此时系统幅频宽较高可达153 Hz.
表2 SDRE权系数对系统幅频宽影响
Tab.2 Influence of SDRE weight coefficient on system amplitude bandwidth
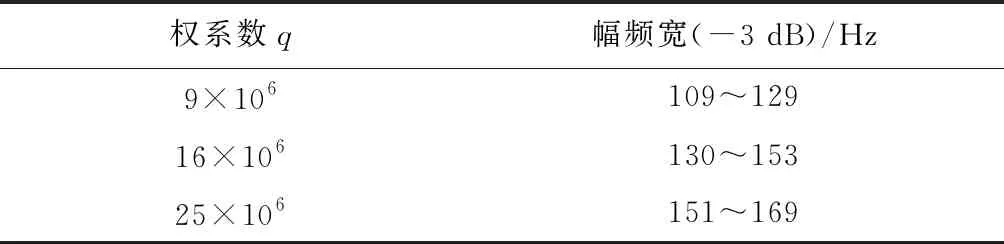
权系数q幅频宽(-3 dB)/Hz9×106109~12916×106130~15325×106151~169
4 随机振动控制仿真分析
为弥补伺服控制的不足,准确再现参考PSD,引入PSD均衡方法,其均衡公式为
基于AR谱模型估计法[12],绘制不同条件下PSD稳态波动情况,权系数q=9×106如图2所示,权系数q=16×106如图3所示.
由图2和图3可知,经过有限次均衡后均可以准确再现参考PSD,除了低频10Hz以下,PSD稳态波动范围在±1 dB以内. 统计不同条件下PSD稳态波动时均衡次数,如表3所示,可知在系统稳定条件下,增大反馈增益和权系数,均可以减少响应PSD稳定波动时的均衡次数.

表3 PSD稳定波动时均衡次数
5 结束语
本文将SDRE技术与PSD均衡方法结合用于电液伺服随机振动控制系统. 建立系统非线性模型,在线求解SDRE获得系统变增益状态反馈,分析反馈设计系统动态特性时发现,SDRE权系数增大,系统幅频宽呈增大趋势,但权系数过大会导致系统阶跃响应超调,本文合适权系数小于等于16×106,系统幅频宽较高可达153 Hz. 同时结合PSD均衡方法,选取不同SDRE权系数和PSD均衡反馈增益,通过仿真分析可知,经过有限次均衡,均可以准确再现参考PSD,除了低频10 Hz以下,PSD稳定波动范围在±1 dB以内,且增大反馈增益和权系数可以减少PSD稳定波动时均衡次数.
