空间细胞机器人面向桁架在轨攀爬步态分析
2020-06-05游斌弟温晓雷刘育强谭春林安德孝
游斌弟,温晓雷,刘育强,谭春林,安德孝,田 浩,赵 阳
(1. 哈尔滨工业大学(威海)船舶与海洋工程学院, 威海 264209; 2. 北京空间飞行器设计总体部, 北京 100094;3. 哈尔滨工业大学航天学院, 哈尔滨 150001)
0 引 言
空间机器人作为多学科的新兴领域,能够很好地适应空间环境,代替航天员进行舱外作业,降低维修成本,提高工作效率[1]。但是,目前已经服役的空间机械臂和空间机器人所能实现的功能是有限的,只能进行简单的检测与维修操作,而且工作空间有限容易受到臂长限制,很多时候需要在人机协作下完成空间任务[2]。空间细胞机器人(Cellular space robot, CSR)[3]是一种利用器官、组织、细胞之间的多层次结构,结合细胞的分裂与分化,设计出多种细胞单元,面向空间任务组装成相应工作构型的新型空间操作装置。它取自细胞卫星(CellSat)的概念,每种细胞单元之间都能实现标准可靠连接,利用细胞的集群效应和迁移效应,相比传统模块化机器人能够适应更多的空间任务环境,扩展性大大提高,配上相应功能的末端执行细胞,完成不同环境下的空间任务[4-6]。
许多重要的配套器件需要安装在航天器扩展的桁架结构上,细胞机器人必须具有在桁架结构上攀爬移动功能,以完成元器件的搬运以及装配维修操作。目前针对在轨攀爬的研究较少,大多攀爬机器人都是进行地面操作,可分为滚动式[7-8]、吸附式[9-12]、夹爪式[13]等几大类。还有一些学者从细胞的群体运动入手,利用材料的趋光特性作为机器人动力源进行移动,为攀爬机器人的研究提供了新的思路[14-16]。综合分析,滚动式或环抱式的攀爬机器人比较适合无节点的单杆(筒)攀爬环境,不太适合多节点的桁架结构;仿生类吸附式很多针对的是平面移动工况,其负载能力通常是有限的;夹爪式的攀爬机器人利用其灵活特性可以很好地避开桁架节点,并且能够夹持桁架杆等航天器件完成攀爬和装配操作。
空间细胞机器人因其良好的变形特性可以灵活应对复杂的空间攀爬环境,很多学者在机器人构型表达方面进行研究。Hou等[17]提出一种C-Graph构型表达方式,在常规图论的基础上扩展出新的连接点和连接方向,通过序列式表达将构型变换方案进行序列配置,便于得到最优构型。王晓帆等[18]基于EMERGE模块提出一种二进制状态表,结合模块特征得到一种新的关联矩阵,能够表达一些简单构型。这些研究大多数都是集中在组成机器人构型的模块单元种类、数量和连接关系上,对相邻单元的连接方向、单元的姿态以及模块关节的初始转角描述较少。同时,大多数基于拓扑构型可以快速得到构型矩阵,但当由构型矩阵描绘拓扑构型时,就很难保证唯一性和快速性。
步态分析作为机器人运动策略选择和运动规划的基础,一直是机器人攀爬运动研究的热点。江励等[19]针对三维桁架结构的单杆攀爬环境设计出尺蠖式、扭转式和翻转式三种步态,但对于多节点的桁架环境需要不断的进行杆间过渡,增加了爬行难度和能量消耗。郁树梅等[20]针对蛇形机器人的三维运动提出一种螺旋步态,能够实现机器人姿态的三维重现,为步态设计提供了新的思路。赵京东等[21]采用三分支机器人针对单杆攀爬环境设计出两种相应的步态,获得了更快的移动速度,但是未考虑桁架节点干涉问题。由此可见,传统的步态研究大多都是针对单杆环境的,对桁架结构多节点干涉问题的考虑较少,且没有针对攀爬环境进行工况的划分,导致不能满足所有的攀爬任务需求,针对三维桁架的双杆攀爬可以很好地解决这些问题。
针对以上研究现状,本文基于空间细胞机器人理念,结合在轨攀爬任务需求提出几种细胞单元,并对其进行基本描述,引入构型矩阵和组织迁移矩阵。综合桁架结构和细胞机器人自身的特点,区别传统工况,将其存在的攀爬工况进行更为广义划分,考虑模块化特性,进行运动学分析。针对每种攀爬工况,提出相应的攀爬步态,通过数值仿真对比不同步态下细胞机器人的关节力矩、能耗以及末端轨迹所占据工作空间等参数,为细胞机器人在三维桁架上完成实际在轨攀爬和搬运操作提供了依据。
1 细胞单元与组织迁移描述
要使组装完成的细胞机器人具有攀爬、运输以及装配等功能,整个细胞机器人至少需要连接细胞L、转动细胞B以及末端执行器细胞S(对于攀爬只用到了手爪细胞)三类细胞单元,如图1所示。
L细胞为正六面体结构,主要承担细胞机器人的扩展功能,为了便于构型表达,将L细胞六个面进行标号,分别为1/10,-1/-10,2/20,-2/-20,3/30和-3/30,其中带有右下标0的为被动连接面。B细胞主要承担转动功能,只有两个连接面,用数字1/10和-1/-10进行表达。S细胞的主要功能是安装末端执行器(手爪、钻头、摄像头等),只留一个面作为连接面,用数字-1/-10表示。为了增加整个细胞机器人的灵活性,每个连接面处有一个旋转自由度。

图1 三种细胞单元Fig.1 Three types of elementary cells
随着攀爬环境的更换,细胞机器人必须具有变形能力,以三分支混联机器人为例,其拓扑图如图2所示,混联机器人中的支链可以看作由几个细胞单元组成的组织。利用细胞单元的迁移特性,L9与L3相连,连接面F6断开,组织可以快速从L5节点迁移到L3节点上,为了便于迁移之后构型的表达,重新排序后L9变为L7,B7变为B9。
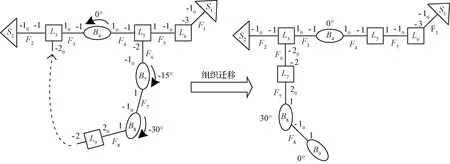
图2 混联机器人组织迁移拓扑描述Fig.2 Topological description of tissue migration for hybrid robots
在图论关联矩阵[22]的基础上进行改进得到一种适合此细胞机器人的迁移矩阵。用细胞单元表示关联矩阵中的顶点,用连接面表示关联矩阵中的边,分别用细胞仓库矩阵N和连接面矩阵F来表达:

(1)
(2)
式中:Li/Bi/Si表示连接、转动、末端执行细胞中的任意一个,代表了细胞单元的种类;n表示细胞单元的数量;Fi表示第i个连接面。
其细胞迁移矩阵G如下所示:

(3)

L,B和S细胞初始姿态保持如图1所示,引入连接面处的转角α以及细胞单元自身的转角γ,保证构型的唯一性。将细胞单元和连接面在全局空间中从1到n(n-1)按照从左到右(y轴正向),从上到下(x轴正向),从顶层到底层(z轴负向)的方式排列,如图2所示,保证了由构型矩阵到拓扑构型转换的快速性。细胞迁移矩阵即能准确表达迁移前后的细胞机器人构型,又能很好地表达组织迁移过程。
2 攀爬运动分析
2.1 攀爬工况
长方体桁架的每个面和每条边上的点都可能成为机器人的攀爬面和夹持点,需要对其攀爬工况进行广义划分,使其能够满足所有攀爬任务需求。基于一致性、重复性和容易控制原则,采用双手爪对称构型的细胞机器人,为了避免单杆攀爬中存在的节点干涉问题,采用双杆攀爬工况,结合空间桁架特点将攀爬工况分为三类——横攀工况、纵攀工况和斜攀工况,如图3所示。
横攀工况:手爪夹持点为Ai,沿着两平行杆进行横向交替运动。
纵攀工况:手爪夹持点为Bi,进行攀岩式纵向交替运动。
斜攀工况:手爪夹持点为Ci,细胞机器人夹持两交错杆中点进行交替运动。
攀爬过程中手爪夹持点所在的位置具有规律性,横攀工况相邻两个夹持点(Ai)之间的距离是一致的,斜攀和纵攀工况下的夹持点(Bi和Ci)都为桁架杆的中点。

图3 桁架攀爬工况Fig.3 Climbing conditions of truss
2.2 运动能力分析
考虑模块化特性,采用基于旋量理论的指数积公式进行运动学分析。
具有n个关节变量的指数积公式为:
(4)

(5)

逆解问题可以划分为以下三类子问题:
Ⅰ类子问题:如图4(a)所示,已知起点p1和终点q1两点,以及旋转轴方向L1,可以求指数积方程e[L1]θ1p1=q1的解θ1。
Ⅱ类子问题:如图4(b)所示,已知p2,q2两点以及L2,L3,可以求e[L2]θ2e[L3]θ3p2=q2的解θ2,θ3。

这三类子问题的求解过程已经有大量研究,此处不再赘述。

图4 细胞单元Fig.4 Elementary cell
1)目标点位姿求解
不失一般性,如图5所示带有分支的混联机器人,当给定各个关节角可以求出末端执行器目标点位姿,{O}为基坐标系,{Oi}为分支点坐标系,{T1}、{T2}为末端执行器坐标系。结合式(1)可知Li/Bi表示L,B细胞中的一个,Lii/Bii表示分支点Li的支链中细胞单元的种类,S细胞只能位于机器人的首尾两端。
假设机器人主链由m个L细胞,n个B细胞,k(1≤k≤2)个S细胞组成,则末端执行器T1的初始位姿:
(6)
式中:l为连接细胞的长度,l0为末端执行器的长度。
每增加一个L或S细胞就增加一个绕y轴的旋转自由度θζ,其旋量指数矩阵:
(7)
式中:c代表cos,s代表sin。
每增加一个B细胞单元,忽略连接面自由度,增加一个B自身旋转自由度θj,其旋量指数矩阵:
(8)
ryj=(mj+2nj+kj+1)l+kjl0
(9)
式中:mj,nj,kj分别表示第j个转动关节前具有L,B,S细胞数量。
分支点坐标系{Oi}相对于{O}的初始位姿:
(10)
式中:mi,ni,ki分别表示分支点Li前具有L,B,S细胞数量。


(11)
2)可达能力分析
为了验证末端执行器能否到达目标夹持点,需要进行运动学解耦,只有特定的构型才能得到封闭解,以图6所示构型为例进行可达能力分析。

图6 细胞机器人构型Fig.6 Configuration of CSR
已知T1目标位姿,式(4)可以写成:
(12)
由于r2在轴线L1和L2上,r4在轴线L4和L5上,所以满足e[V1]θ1e[V2]θ2r2=r2,e[V4]θ4e[V5]θ5r4=r4。
结合式(12)得到:
e[V1]θ1e[V2]θ2e[V3]θ3r4=Tr4
(13)
两边同时减去r2,得到:
e[V1]θ1e[V2]θ2e[V3]θ3r4-r2=e[V1]θ1e[V2]θ2·
(e[V3]θ3r4-r2)=Tr4-r2
(14)
利用等式两边模长相等,得到:
(15)
式(15)就转化为了第Ⅲ类子问题,由此可得θ3,并结合式(13)可得:
e[V1]θ1e[V2]θ2(e[V3]θ3r4)=Tr4
(16)
式中:e[V3]θ3r4和Tr4为Ⅱ类子问题中p2,q2,利用Ⅱ类子问题可以求出θ1和θ2。
由式(12)可得:
e[V4]θ4e[V5]θ5=e-[V1]θ1e-[V2]θ2e-[V3]θ3·
(17)
由于r5在轴线L5上而不在轴线L4,可得:
e[V4]θ4e[V5]θ5r5=e[V4]θ4r5=Tar5
(18)
利用Ⅰ类子问题可以求出θ4。由式(17)可得:
e[V5]θ5=e-[V1]θ1e-[V2]θ2e-[V3]θ3e-[V4]θ4·
(19)
Tb和关节5的方向已知,由此可以求出θ5。
已知θ1,θ2,θ3和T2目标位姿,结合式(11)得:
(20)
(21)
采用求θ4和θ5的方法可求出关节变量θ6和θ7。
当解得θ1~θ7在关节变量的极限范围之内时,说明末端执行器T1和T2能够到达目标夹持点。
2.3 攀爬步态描述
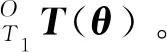
追求控制简单,考虑攀爬的交替性和重复性,细胞机器人构型为双手爪五自由度对称构型(去掉图6分支),设计横攀工况的攀爬步态如图7所示。
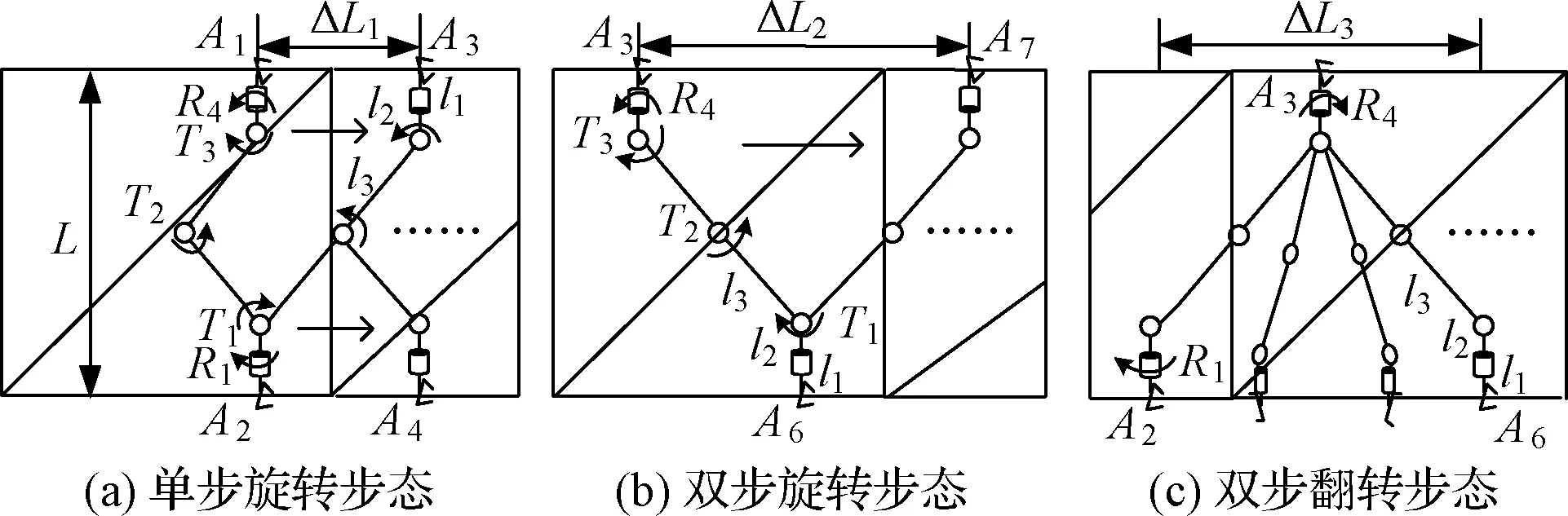
图7 横攀步态Fig.7 Gait of horizontal climbing
横攀单步步态如图7(a)所示,具体攀爬过程如下:
(1)机器人位于初始状态,两手爪斜攀于桁架平面,A2端手爪夹紧,A1端手爪松开。
(2)扭转关节R4转动60°,使手爪脱离桁架杆,然后旋转关节T1,T2,T3转动,使A1端手爪右移到最大距离A3点处。
(3)交换夹持端,A3端夹紧,A2端松开,控制关节R1,T1,T2,T3进行转动,回到初始状态,重复步骤(1)~(3)。
如图7(b)所示,双步旋转步态与单步步态相比,参与运动关节相同,步距发生改变,A3端手爪直接移动到A7点处,然后互换夹持端,进行下次循环。
如图7(c)所示,双步翻转步态与双步旋转步态相比只改变了手爪从A2到A6点的工作关节,控制扭转关节R1,R4转动180°,然后进行下次循环。
设计纵攀工况下的攀爬步态如图8所示。
图8 纵攀步态Fig.8 Gait of vertical climbing
纵攀旋转步态如图8(a)所示,具体攀爬过程如下:
(1)两手爪斜攀于桁架平面,B2端夹紧,B1端松开,控制关节T2转过角度β,使B1端手爪完全脱离桁架杆。
(2)扭转关节R1以B2端手爪为轴线转动180°。
(3)T2反向转过角度β,互换夹持端,进行下一次循环。
如图8(b)所示,纵攀翻转步态与旋转步态相比,只是改变了手爪从B1到B3点的工作关节,旋转关节T1,T2,T3绕顺时针方向旋转完成纵攀过程。
纵攀工况下每步的夹持点都是固定的,每步移动的距离也是一定的,ΔL纵=2L。
设计斜攀工况的攀爬步态如图9所示。

图9 斜攀旋转步态Fig.9 Rotating gait of oblique climbing
(1)两手爪位于桁架杆中点斜攀于桁架平面,关节T1,T3初始转角为90°,C2端夹紧,C1端松开。
(2)控制关节T3转过角度θ1(见图9(a)),C1端手爪脱离桁架杆,控制扭转关节R1顺时针转动90°,最终达到状态如图9(b)所示。
(3)互换夹持端,达到图9(c)所示状态,进行下一次循环。
由于每步都保证夹持点位于桁架杆的中点,则步距ΔL=L。
3 步态仿真校验
针对细胞机器人攀爬过程,作如下可行性讨论:
1)每种细胞单元的设计尺寸,能够满足其所采用的驱动方式的空间几何尺寸需求。
2)细胞机器人的拓扑构型,能够满足其所面向的空间应用环境。
3)不考虑重力因素影响。
取桁架杆杆长L=1100.00 mm,攀爬机器人杆长l1=70.00 mm,l2=140.00 mm,l3=420.00 mm,由三种细胞单元组成的杆长质量m1=1.25 kg,m2=2.5 kg,m3=7.5 kg,横攀单步步态的步距ΔL1=493.15 mm,完成一次步距位移的时间取为20.0 s,为了保证数据的可比性,需要让每种步态在相同的时间内移动相同的距离,横攀双步旋转与双步翻转步态的步距都为2ΔL1=986.3 mm,设置时间为40.0 s。横攀与斜攀工况下的机器人构型一致,只是利用其模块化特性改变了手爪的位置,纵攀步态的步距都为2200.00 mm,设置时间为89.2 s,斜攀旋转步态的步距为1100.00 mm,设置时间为44.6 s。
本文采用一种简单等效算法[23],用能耗表述值Q估计能量消耗。
(22)
式中:τi表示参与运动关节力矩,单位N·mm;t0表示完成一次步距位移所用的时间,单位s。
3.1 攀爬运动数值分析
如图10所示,横攀工况的三种步态均能很好地避开桁架节点,单步步态和双步旋转步态的移动端手爪均在与桁架平面平行的平面上运动,末端轨迹占据的工作空间较小,双步翻转步态的末端轨迹为半圆弧,占据的工作空间较大。由图11可知,单步步态所需的最大关节力矩为550.37 N·mm,双步旋转步态为52.73 N·mm。单步步态最大力矩关节T1与双步旋转步态最大力矩关节T3规划方式相同,转角相同,转动时间不同,T1角加速度大于T3,惯性张量相同,则双步旋转步态的最大关节力矩小于单步步态的最大关节力矩。同样,双步翻转步态的最大关节力矩R4小于双步旋转步态的最大关节力矩T3。

图10 横攀工况仿真Fig.10 Simulation of horizontal climbing conditions

图11 不同攀爬工况最大驱动力矩Fig.11 Maximum joint torque of CSR for different climbing gait

图12 纵攀和斜攀工况仿真Fig.12 Simulation of vertical and oblique climbing conditions
如图12所示,可以看出纵攀工况夹持点位于桁架杆的相同点,能够很好地完成交替运动,但其末端轨迹所占据的工作空间都是比较大的。由图11可知,两种步态下的最大关节力矩分别为104.46 N·mm和66.61 N·mm。细胞机器人在无重力环境攀爬过程中主要克服惯性力,关节力矩与惯性张量有关,纵攀翻转步态的T3关节惯性张量较小,理想情况下导致其驱动力矩非常小,所以无负载情况下,距离移动端手爪越近的关节,力矩通常越小。
斜攀工况每次攀爬的夹持点都位于桁架杆的中点,保证了步态的一致性和重复性,由图13可知,斜攀旋转步态驱动力矩的最大值为103.25 N·mm。T3关节转动时,会对R1关节产生扰动,所以在0~5.57 s和39.03~44.6 s的时间内,关节R1的驱动力矩不为0。

图13 斜攀旋转步态各关节驱动力矩Fig.13 Joint torque of CSR for rotating gait of oblique climbing
3.2 不同攀爬工况综合分析
空间桁架上通常会安装一些大型航天元器件(太阳能电池板、散热器等),所以攀爬机器人末端轨迹占据的工作空间不能太大,否则容易产生干涉。由图14可知,横攀单步步态和双步旋转步态的末端轨迹所占据的工作空间较小,纵攀工况的步态占据工作空间较大。分析不同攀爬工况机器人驱动力矩的大小,只需比较每种步态最大的关节驱动力矩即可,由图11可知,横攀单步步态所需驱动力矩最大,横攀双步翻转步态的驱动力矩最小,由于细胞机器人工作在空间环境中,在不考虑摩擦的情况下,关节做功主要克服惯性力,所以三种攀爬工况所需的驱动力矩都不是太大。利用式(22)来近似表述不同步态能耗的多少,计算结果如表1所示,横攀双步翻转步态消耗的能量最少,横攀单步步态消耗的能量最多。
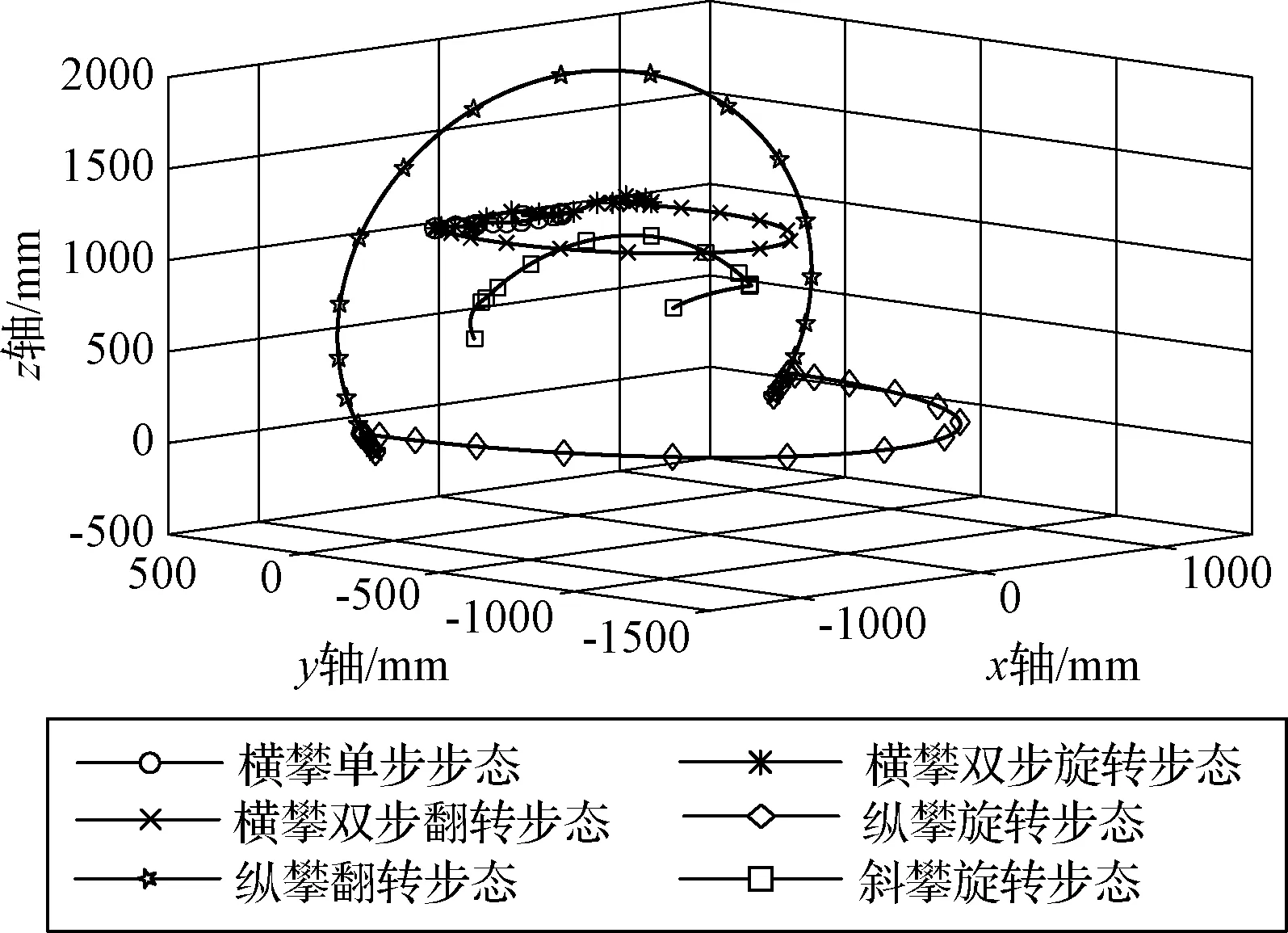
图14 末端轨迹占据的工作空间对比Fig.14 Comparison of the workspace occupied by the end trajectory

表1 能耗对比Table 1 Comparison of energy consumption
上述几种步态均能够很好地避开桁架节点,满足三维桁架的攀爬工况,实现交替重复性运动。在实际攀爬过程中,空间环境总是比较复杂的,针对不同优化目标选择适合的步态:1)当目标点的距离较远,则需要大步距的步态,横攀单步步态之外的其它步态都可以选择;2)当要求控制方式简单(参与的关节少),适宜选用斜攀旋转步态和纵攀旋转步态;3)当遇到障碍物较多的环境,攀爬机器人末端轨迹占据的工作空间应该最小,横攀单步步态和横攀双步旋转步态是很好的选择;4)当要求力矩最小和能耗最优,最宜选择横攀双步翻转步态。
4 结 论
1) 针对空间在轨装配、维修过程中的攀爬移动问题,基于细胞机器人理念,提出连接细胞、旋转细胞和末端执行器细胞三种基本细胞单元,相比传统的模块化机器人,具有更加灵活的细胞单元模块,利用细胞的集群效应扩展性大大提高。
2) 基于图论和拓扑学原理在关联矩阵的基础上进行改进,得到一种既能描述迁移前后细胞机器人构型又能描述组织迁移过程的细胞迁移矩阵,确定了细胞单元种类和数量、连接面信息、细胞单元的初始姿态、空间顺序以及关节旋转角,保证了构型表达的唯一性。
3) 将三维桁架结构划分出横攀、斜攀以及纵攀三种广义的攀爬工况,能够满足所有攀爬任务需求,针对每种工况提出相应的攀爬步态。步态仿真结果表明,这些步态都能够很好地避开桁架节点,实现交替重复性运动,满足一致性要求。不同步态的关节力矩、能量消耗以及末端轨迹所占据的工作空间是不同的,针对不同的应用环境和优化目标,选择相应的步态。在无重力和末端无负载的工况下,所需关节力矩都比较小,短构型空间机器人在轨攀爬移动过程中关节力矩可以不作为其主要优化目标。
