基于驾驶员意图及行驶场景判断的智能驾驶模式识别策略
2020-06-03郑羿方卢萍
郑羿方 卢萍

摘 要:目前市面上的乘用车大多具备一个以上的驾驶模式供选择,有些车型甚至可以提供车主自定义的驾驶模式,从而满足驾驶员不同场景下的驾驶需求。由于主机厂对驾驶模式的定义具有一定使用场景针对性,可能出现当前选定驾驶模式不适合驾驶员的驾驶风格,或者当驾驶场景发生改变时,当前选定的驾驶模式无法及时满足驾驶员期望的情况。文章介绍一种驾驶模式识别策略,通过对CAN总线相关信号实时监控,掌握驾驶员输入,如加速、制动及转向等动作;以及车辆的动态表现,如车速、纵向加速度及侧向加速度等参数,并利用建立的模型,对车辆当前的行驶交通环境,驾驶员的驾驶风格以及驾驶员的意图进行综合判断,从而实时为驾驶员智能切换更合适的驾驶模式。该策略可满足驾驶员意图与驾驶模式相互匹配,从而提升用户的驾驶主观体验。
关键词:驾驶模式;智能识别;CAN总线
中图分类号:U467 文献标识码:B 文章编号:1671-7988(2020)09-53-05
Strategy for Intelligent Drive Mode Detection Based on Drivers Intensionand Driving Scenario Estimation
Zheng Yifang, Lu Ping
( GAC R&D Center, Guangdong Guangzhou 511434 )
Abstract: Nowadays most of the passenger cars on the market offer more than one drive mode, some vehicle models even offer driver self-customized mode in order to satisfy the drivers need under different driving scenarios. However when OEMs are defining those drive modes ,they are specified to be used under certain driving situations, so there are possibilities that the selected drive mode does not match with the driving style of the customers, or when the driving scenario is changed, the current selected drive mode does not satisfy the drivers expectation. This article introduces an intelligent drive mode detection strategy, which by real time monitoring related signals on CAN bus, to master drivers input, such as acceleration, brake and steer maneuver, as well as vehicle dynamic behavior such as speed, longitudinal acceleration and lateral acceleration, and then take advantage of the established model to understand the traffic environment, customer driving style and the drivers intention, in order to intelligently switch to the most appropriate drive mode for the customers. This strategy could realize a good match between the drive mode and the drivers intention, which improves the subjective driving experience of the customers.
Keywords: Drive mode; Intelligent detection; CAN bus
CLC NO.: U467 Document Code: B Article ID: 1671-7988(2020)09-53-05
引言
本文介绍一种策略,利用CAN总线信号,获取驾驶员输入及车辆动态表现,通过模型计算,继而获取当前车辆驾驶交通环境,驾驶员意图及驾驶风格,从而智能匹配当前驾驶条件下的最佳驾驶模式,提升驾驶员的驾驶主观体验。目前市场上销售的乘用车车型,大多提供多于一种的驾驶模式供客户选择,典型模式一般有三种,分别为普通模式(Nor -mal)、经济模式(ECO)和運动模式(Sport)。部分车型结合配置的不同,可以提供更多的驾驶模式供使用,如越野模式(Off-road)、深雪模式(Deep snow)、全地形模式(ATS)和用户自定义模式(Individual)等,从而匹配消费者在不同使用场景下对车辆通过性、动力性、燃油经济性等性能的各方面不同需求。汽车主机厂在对驾驶模式进行开发时,会参照市场目标输入,确定不同驾驶模式的主要使用场景,量化使用场景下性能开发的目标,并在开发后做主客观评价,确保驾驶模式的性能水平达成既定的开发目标。然而消费者对每个驾驶模式的使用场景定义了解并不充分,可能出现驾驶行为与所选驾驶模式不相匹配,或者当驾驶行为由于交通环境变化,驾驶风格调整以及驾驶意图的波动发生变化时,驾驶员未及时调整当前驾驶模式,产生所选驾驶模式与驾驶意图不相符,造成驾驶体验感下降的情况。为了优化上述问题,本文介绍一种策略,利用CAN总线相关信号,首先获取驾驶员驾驶意图的相关输入,如加速需求,制动需求,转向需求等,以及车辆动态表现,如速度,纵向加速度,侧向加速度等,将上述信号输入建立的模型中,获取包含当前行驶交通环境,驾驶员的驾驶风格以及驾驶员当前的驾驶意图等关键信息;随后根据智能驾驶模式识别策略,判断是否需要对当前驾驶模式进行切换或维持当前驾驶模式,实现驾驶模式自动识别的效果。需要一提的是,由于驾驶模式联动的系统数量随着车辆配置的增加正在逐渐提升,不仅包含动力总成领域,还有转向系统(EPS),车身稳定系统(ESC),四驱系统(AWD),主动悬架系统等等。本文介绍的驾驶模式主要关联动力系统领域,驾驶模式的切换主要改变动力的输出特性,如发动机功率输出曲线,加速踏板MAP等,其他领域系统的性能可根据模式的切换做适应性变化。
1 智能驾驶模式识别策略监控的信号
智能驾驶模式识别策略所需的总线信号主要来自六个模块,分别有:车身电子稳定系统(ESC),电动助力转向系统(EPS),车身控制模块(BCM),发动机控制单元(EMS),自动变速器控制单元(TCU)以及电子驻车系统(EPB)。智能驾驶模式识别策略既可以集成于发动机控制单元(EMS),也可以集成于车身电子稳定系统中。本文将策略集成于发动机控制单元,CAN网络拓扑见图2:
由上述六个模块获取的相关信号见表1:
上述信号仅为最基本的信号需求,根据车型配置的不同,还可以进一步追加相关信号,如具备驾驶辅助配置车型可增加ACCActive(自适应巡航激活状态),AEBActive(紧急制动激活状态)等信号,电动车型可以增加MaxDrvTorq(当前最大驱动能力值)等信号,进一步提升智能模式识别策略的鲁棒性。
2 智能驾驶模式识别策略工作框架
智能驾驶模式识别策略工作框架主要包含六大模块,分别是:(1)功能使能判断模块;(2)功能禁用判断模块;(3)行驶交通环境判断模块;(4)驾驶员意图判断模块;(5)驾驶风格判断模块;(6)驾驶模式识别模块,包含四个子模块。工作框架见图三,其中由黑框包围的模块为智能驾驶模式识别逻辑主模块,包含模块(3)-(6):
2.1 功能使能判断模块
接收来自智能驾驶模式识别启用按键的信号,并结合其他系统状态,判断是否可以进入智能驾驶模式识别模式,亦可称自动模式。如出现相关系统故障,如TCU报过热保护,或ESC报系统降级等故障,则该模块不会发出进入Auto模式指令,车辆将维持在驾驶员选择的驾驶模式。
2.2 功能禁用判断模块
当某些功能被激活时,进行驾驶模式的切换可能造成车辆的失稳,或驾驶体验的下降。例如当TCS功能激活时,进行驾驶模式切换,可能导致动力响应特性(扭矩上升斜率、扭矩限值等)发生改变,影响TCS的控制逻辑。因此在这种情况下将禁止执行驾驶模式切换,车辆维持在相关功能激活前的驾驶模式不变。
2.3 行驶交通环境判断模块
该模块用于识别当前车辆行驶的交通环境,主要对以下状态进行识别:(1)车辆是否在等候红绿灯或正在经历拥堵;(2)车辆是否行驶在顺畅的城市道路中;(3)车辆是否行驶在近郊快速道;(4)车辆是否行驶在高速公路。
2.4 驾驶员意图判断模块
该模块对驾驶员的意图进行判断,主要对以下意图进行识别:(1)停车;(2)前进行驶;(3)巡航;(4)超车。
2.5 驾驶风格判断模块
该模块结合行驶交通环境判断模块输出的结果,识别驾驶员的驾驶风格,例如通过相关信号识别驾驶员是否有频繁的加减速请求等动作,最终向外输出三个判断结果,分别是经济驾驶风格,普通驾驶风格或运动驾驶风格。
2.6 驾驶模式识别模块
该模式接受上述模块输入的信息,经过模型分析后,将最终输出是否进行驾驶模式切换以及切换至哪个模式的指令。该模块包含四个子模块:(1)驾驶模式预判断子模块:根据行驶交通环境,驾驶员意图及驾驶风格模块的判断结果输出,预先选定车辆将要进入的驾驶模式;(2)驾驶模式切换判断子模块:判断当前状态下是否可以进行驾驶模式的切换;(3)驾驶模式切换延迟子模块:该模块将过滤频繁的模式切换请求,保证驾驶主观感的相对一致;(4)驾驶模式最终切换子模块:最终执行驾驶模式切换的模块,根据上述模块及子模块的判断逻辑策略,结合特定行驶场景对驾驶模式的要求,发出驾驶模式切换的指令。
3 智能驾驶模式识别策略介绍
3.1 行驶交通环境判断模块输入与输出
该模块包含四个逻辑策略,通过对输入信号-车速-设定不同的标定阈值,并做计时、延时等处理后,根据输出结果,判断车辆当前所处的行驶交通环境。输入与输出信号见图4:
(1)红绿灯等待及拥堵识别策略:判断车速是否低于车辆停止的速度门限Vstopthres,同时开始计时与计数,当停止时间Tstop大于Ttrafficlight时,判断车辆已停止,否则则认为车辆在等待红绿灯。此外当一段时间内速度低于Vstopthres的次数Tstopcount大于门限值Ttrafficjam时,则认为车辆处于拥堵状态。该策略输出三个状态位,相互互斥:1)等待红绿灯;2)停止;3)拥堵。
(2)城市道路行驶识别策略:判断车速是否低于近郊快速路门限Vsuburb,且未进入等红绿灯或拥堵,同时开始计时,若低于门限的时间Tvehspd超过门限值Tcity,则判断车辆进入城市道路行駛,若未超过门限Tcity,则认为在向城市道路过渡。该策略输出两个状态:1)城市道路;2)城市道路过渡。
(3)近郊快速路行驶识别策略:策略同城市道路行驶识别策略,门限值相应为Vhighway及Tsuburb。该策略输出两个状态:1)近郊快速路;2)近郊快速路过渡。
(4)高速公路行驶识别策略:策略同城市道路行驶识别策略,门限值相应为Vhighway及Tcity。该策略输出两个状态:1)高速路;2)高速路过渡。
3.2 驾驶员意图判断模块输入与输出
该模块包含三个逻辑策略,其中最重要的是超车识别策略,通过输入制动信号,转向信号,转向灯信号、车速信号等,识别当前驾驶员是否有超车意图。输入与输出信号见图5:
前进行驶及停止识别策略较简单,不单独做介绍。超车识别策略:结合驾驶员在实际超车中的行为,首先判断转向灯是否激活,若激活,则继续判断此时制动灯是否激活,若激活,则驾驶员可能准备拐弯,无超车意图。若未激活,则进一步判断车速是否超过超车速度门限,避免低速工况下,误将部分车型为避免起步顿挫,弱化低速加速踏板map动力输出灵敏度,导致驾驶员深踩加速踏板的行为认为是在超车;同时对加速踏板开度及转向角度进行判断,若均超过标定的阈值,且维持的时间Tcount大于标定的阈值Tovertake,则认为驾驶员此时有超车意图,将输出超车的状态位。
3.3 驾驶风格判断模块输入与输出
该模块主要包含两项策略,基于车辆动态的驾驶风格判断策略以及基于驾驶员行为的驾驶风格判断策略。分别基于车辆的动态,如速度,侧向加速度,纵向加速度等,以及驾驶员行为,如转向次数,踩下制动踏板次数等,对驾驶风格进行判断,输入与输出信号见图6:
(1)基于车辆动态的驾驶风格判断策略:将车速,纵向加速度及侧向加速度,导入车辆动态因子方程Dynamic_ Index(t)中,方程不展开介绍,通过方程可以得出一个反映车辆当前驾驶动态激烈性的数值。当该数值落入相应区间时,则输出对应驾驶风格:1)Dynamic_Index_Eco;2)Dynamic_ Index_Standard;3)Dynamic_Index_Sport。
(2)基于驾驶员行为的驾驶风格判断策略:通过对转向角度,车速,制动灯激活状态等信号大于阈值,或激活状态的次数进行计数,当在一段周期内上述计数值落入相应标定的范围时,则输出对应驾驶风格:1)Driver_Style_Eco;2)Driver_Style_Standard;3)Driver_Style_Sport。
3.4 驾驶模式识别模块输入与输出
3.4.1 驾驶模式预判断子模块输入与输出
该子模块接受前三个模块的输出结果,包括行驶交通环境,驾驶风格等状态,通过内部策略,对模式切换做预判断,输入与输出信号见图7:
该子模块通过协调Drivr_Index_Y输出的模式风格与Dynamic_Index_X输出的模式风格,获得初步的驾驶模式。首先根据行驶交通环境,区分成非高速路行驶及高速路行驶两种策略。在高速路行驶时,初步的驾驶模式更倾向于使用Eco模式,以达到节能减排的效果。此外,基于驾驶员行为获得的模式风格Drivr_Index_Y优先级高于基于车辆动态获得的模式风格Dynamic_Index_X,在Count(t)特定时间内,初步的驾驶模式就为Y对应的驾驶模式。如果在超过特定时间之后Y与X依然未能达成一致,则初步的驾驶模式切换为X对应驾驶模式。该模块最终输出的结果为Pre-select Mode_ X,X可以是:1)Eco;2)Standard;3)Sport。
3.4.2 駕驶模式切换判断子模块输入与输出
该模式接受驾驶模式预判断子模块及行驶交通环境判断模块的输出结果,对当前行驶状态下是否可进行驾驶模式的切换进行判断,输入与输出信号见图8:
当车辆正在等待红绿灯或经历拥堵时,不允许驾驶模式的切换。在行驶交通环境未完成切换时,也不允许驾驶模式的切换。此外,在行驶中如果踩下制动踏板,在一定时间内,也不允许执行模式切换。车辆维持当前驾驶模式行驶。该模块最终输出的结果为Mode_check_X,X可以是:1)Eco;2)Standard;3)Sport。
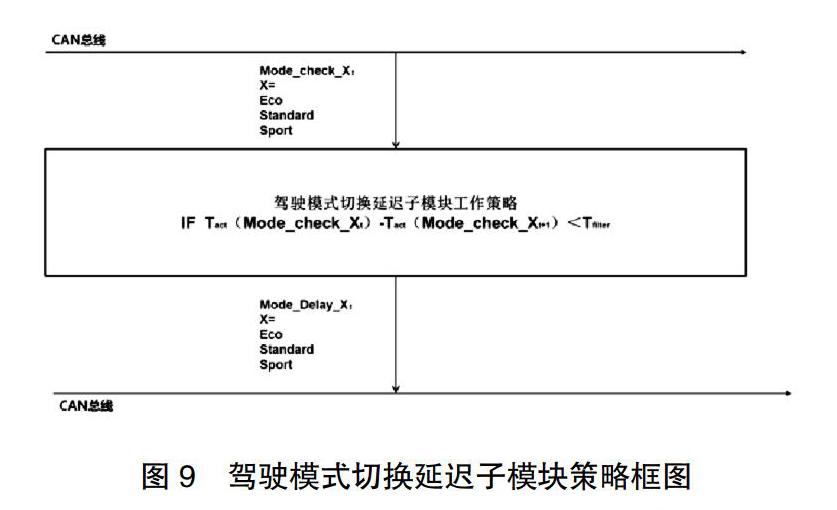
3.4.3 驾驶模式切换延迟子模块输入与输出
该模块加入模式切换计时逻辑,对来自驾驶模式切换判断子模块的输出结果进行计时,当输出结果变化过于频繁时,将对其进行过滤处理。输入与输出信号见图9:
当t时刻从驾驶模式切换判断子模块接受输出模式Mode_check_Xt,时,驾驶模式切换延迟子模块开始计时,在t+1时刻再次接受输出模式时,计时停止,并与标定的模式过滤时间阈值Tfilter进行对比,如果时间间隔太短,则过滤该模式输出,并继续计时,直至时间间隔大于标定的阈值。该模块最终输出的结果为Mode_Delay_X,X可以是:1)Eco;2)Standard;3)Sport。
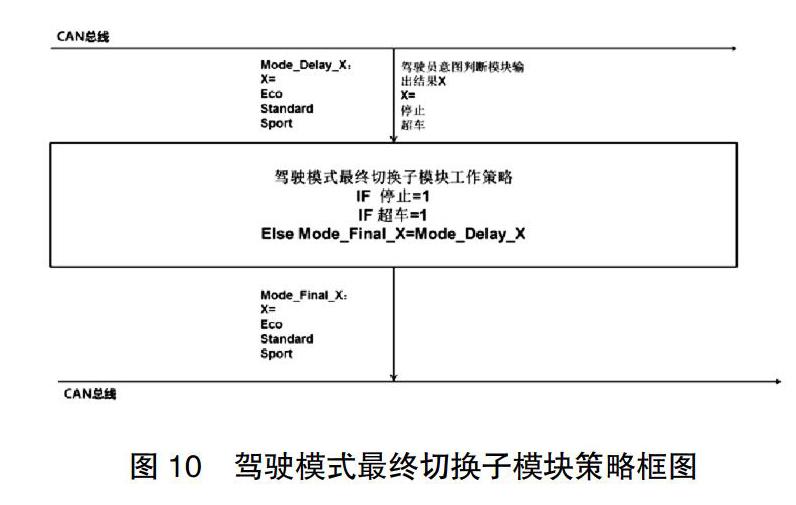
3.4.4 驾驶模式最终切换子模块输入与输出
该模块主要对特定的驾驶意图下的模式做确认,如果处在如停车或者超车等情况下,将直接对驾驶模式进行切换,缩短逻辑判断环节,否则将执行上一个模块的输出结果。输入与输出信号见图10。
本模块接受驾驶员意图模块的输出结果及驾驶模式切换延迟子模块的输出结果。一般情况下将直接执行上一个模式的输出结果,但当车辆停止状态激活时,模式自动切换为Eco模式,减少能量消耗。而当超车状态激活时,立即切换为Sport
模式,保证车辆的动力性。由于上述两个驾驶行为发生频繁,尤其是超车行为,动力响应必须及时,因此由最后一个模式进行处理,可以减少逻辑判断过程,提升系统响应时间。当上述状态未激活时,将输出最终的驾驶模式状态,车辆完成驾驶模式的切换。该模块最终输出的结果为Mode_Final_X,X可以是:1)Eco;2)Standard;3)Sport。
4 结论
本文介绍了一种控制策略,利用CAN总线信号,提取驾驶员行为及车辆动态表现,通过模型分析,获取当前车辆及驾驶员的状态,判断驾驶员是否有驾驶意图的变化,车辆行驶环境是否改变。并将分析结果输入智能驾驶模式识别模块中,通过设定的逻辑,并结合延时,计时等手段,保证模式切换的鲁棒性。该模式可集成与EMS,ESC等系统中,实现智能的驾驶模式识别功能。
参考文献
[1] 高晨宵.纯电动汽车驾驶行为预测和驾驶模式识别[D],大连理工大学.
