考虑操纵稳定性的适时四驱扭矩分配策略
2020-06-02王敷玟凌新新张家彬陈强
王敷玟,凌新新,张家彬,陈强
(广州汽车集团股份有限公司汽车工程研究院,广东广州 511434)
0 引言
横摆运动稳定性是决定高速汽车安全行驶的一个主要性能,被称为“高速车辆的生命线”,四轮转向技术、主动悬架技术、直接横摆力矩控制技术是改善车辆稳定性最主要的几个方法。而直接横摆力矩控制,通过改变轮胎纵向力,产生一横摆力矩来改变车辆横摆角速度,使车辆迅速达到稳定状态是目前车辆稳定性控制中是最有效、应用最为广泛的方法[1-4]。
适时四驱系统是一种主动控制系统,它通过四驱控制器控制四驱后桥扭矩输出。根据ECU判断逻辑,可将车辆驱动模式分为两轮驱动、适时四轮驱动、全时四轮驱动。目前国内适时四驱系统的扭矩分配主要由车速、转向角及车轮打滑程度来确定,而未考虑整车操纵稳定性的需求,然而在低附路面,汽车在转向和侧向风作用时,侧向力常常接近附着极限或达到饱和状态,车辆的转向特性发生明显改变,从而出现侧滑、激转、侧翻或转向迟钝等丧失车辆动力学稳定性的危险局面。针对适时四驱扭矩分配考虑操纵稳定性的问题,文献[5]中日产公司研制了总是保持“中性转向”特点的电子控制前、后驱动力分配系统(ETS),在固定方向盘转角加速行驶时,有ETS的4WD具有接近中性转向的特点,使驾驶者容易判断其行驶路径,具有较好的操纵稳定性。文献[6]中基于一种智能扭矩控制耦合器(ITCC),根据其扭矩传递特性,制定了同时考虑驱动性能及操纵稳定性能的多种MAP扭矩分配策略,并以全油门加速转弯工况为例,实现将车辆的转向特性由“过度转向”向不足转向转变。文献[7]中基于一种纯电动四驱驱动汽车,设计了基于遗传算法和PID控制的轴间扭矩分配控制系统,使车辆动力性和行驶稳定性得到提升。文献[8]中采用轴载比例分配算法,设计了基于横摆角速度与质心侧偏角的联合滑模变结构控制策略,实现了车辆的横向稳定性控制。
本文作者依据智能适时四驱系统车辆的特点,提出一种考虑车辆操纵稳定性的四驱扭矩分配规则,充分利用后轴的附着条件,采用PID控制理论,对车轮打滑和横摆角速度偏差进行联合控制,提升车辆的越野脱困能力及提升车辆在低附路面的操纵稳定性。
1 系统结构简介
如图1所示,采用的四驱系统为一种主动控制的智能适时四驱系统,它主要由取力器总成、中间传动轴、电控多片离合器、后差减速器总成等组成。
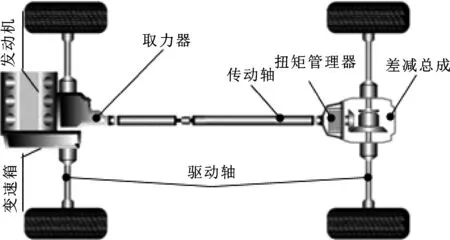
图1 四驱系统拓扑结构简图
发动机的动力经过变速箱再经取力器总成增速降扭后将动力传至中间传动轴,再通过电控多片离合器片调节内部电磁衔铁控制中间传动轴输出扭矩,最后通过后差减速器总成减速增扭后由后驱动轴将动力传至车轮,从而辅助驱动汽车行驶。
根据图1所示的四驱系统拓扑结构,忽略差速器内部阻力,忽略驱动轴、差速器、传动轴等转动惯量,力学关系为变速箱输出端被动齿轮输出扭矩:
Ttran=η1KiioTeng
(1)
后桥总输出扭矩:
Tr=ηrirTmm_act
(2)
后桥车轮输出扭矩:
(3)
前桥输出扭矩:
Tf=Ttran-Tr
(4)
前桥车轮输出扭矩:
(5)
式中:Ttran为变速箱被动齿轮总输出扭矩,N·m;η1为变速箱传动效率;i为变速箱速比;io为变速箱主减速器速比;K为液力变矩器变矩比;Teng为发动机输出扭矩,N·m;Tr为后桥总输出扭矩,N·m;ηr为扭矩管理器和后差减速器综合传动效率;Tmm_act为扭矩管理器实际扭矩,N·m;ir为后差减速器速比;Trl为左后轮输出扭矩,N·m;Tφrl为左后轮附着扭矩,N·m;Trr为右后轮输出扭矩,N·m;Tf为前桥总输出扭矩,N·m;Tfl为左前轮输出扭矩,N·m;Tφfl为左前轮附着扭矩,N·m;Tfr为右前轮输出扭矩,N·m;Tφfr为右前轮附着扭矩,N·m。
2 适时四驱整车模型的建立
2.1 车辆模型
汽车是由驾驶员通过油门踏板、制动踏板和转向盘来控制的,其行驶状态主要由汽车的纵向速度、侧向速度和横摆角速度决定。由于线性二自由度模型可以很好地反映驾驶员的转向输入与汽车横摆角速度、侧偏角、侧向加速度之间的线性关系,被广泛用来计算汽车的横摆角速度和质心侧偏角等控制变量名义值。线性二自由度模型[1]如图2所示。
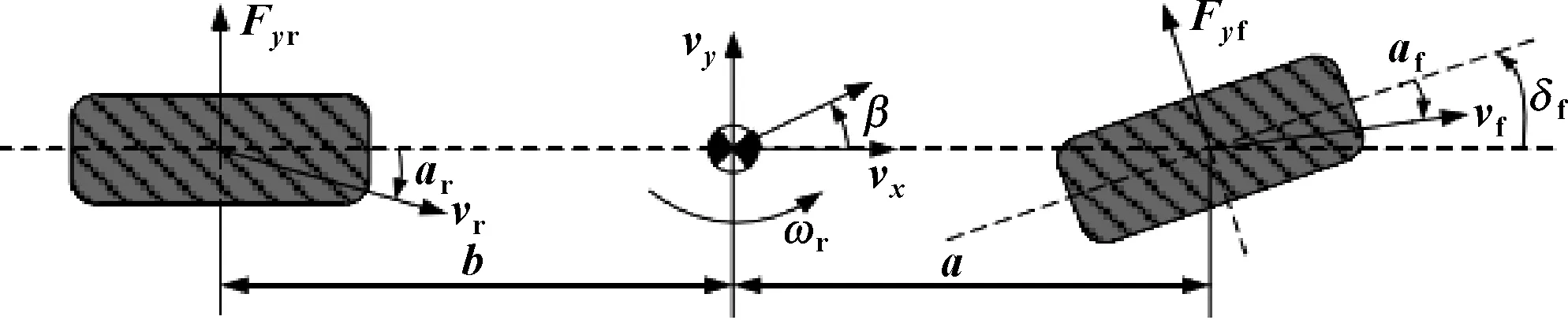
图2 线性二自由度汽车模型
(6)
(7)
考虑路面附着系数的限制,其质心侧偏角与横摆角速度需满足如下约束条件:
(8)
式中:k1、k2分别为前、后轮轮胎侧偏刚度;μ为路面附着系数;ωrd为名义横摆角速度,rad/s;βd为名义质心侧偏角,(°)。
2.2 轮胎模型
由于文中分析主要涉及纵向和侧向附着力,故采用Dugoff轮胎模型计算轮胎与地面的纵向、侧向附着力[9]。
驱动轮滑转率为
(9)
地面给车轮的驱动力为
(10)
式中:ω为车轮轮速;r为轮胎动态半径;Fxxi、Fyyi分别为轮胎的纵向、侧向附着力;Cxi、Cyi分别为轮胎纵向、侧向刚度;φi、sxi分别为各驱动轮轮胎侧偏角及纵向滑移率;f(s)为与轮胎动态参数有关的函数。
2.3 四驱扭矩控制模型
文中采用的四驱扭矩管理器为电磁多片式离合器结构,在给扭矩管理器发出扭矩请求信号后,扭矩管理器不能马上完成所需动作,到达稳态须经历一个动态过程,具有一定的延迟。根据台架及整车测试结果,采用2阶传递函数来模拟扭矩管理器实际的扭矩响应,如下:
(11)
Tmm_Cac=KnI2
(12)
式中:Tmm_act为扭矩管理器实际输出转矩,N·m;ξ为二阶系统阻尼比;ωn为扭矩管理器固有频率,rad/s;Tmm_Cac为扭矩管理器的目标转矩,N·m;Kn为由电磁线圈、凸轮盘、离合器片等决定的结构特性参数,为扭矩系列扭矩管理器的固有特性;I为电磁线圈电流,A。
3 智能扭矩分配策略
在直线行驶中,车辆主要根据各车轮的滑转情况实时调配驱动力以最大化利用路面附着,在保证扭矩管理器结合平顺、断开平稳的前提下,以轴间转速差为零作为期望控制目标,对四驱扭矩进行控制,从而提高整车的动力性和通过性。
由扭矩管理器控制模型可知,扭矩管理器通过控制电磁线圈电流来控制目标扭矩输出,因此,整车扭矩管理器输入、输出端转速差为
Δn=nf-nr
(13)
则有控制器输出的电流变化量为
(14)
式中:Δn为前后轴轴速差,r/min;nf为前轴轴速,r/min;nr为后轴轴速,r/min;kp、ki、kd分别为比例、积分和微分增益系数。
在评价扭矩管理器是否结合平顺、断开平稳时,以冲击度作为评价指标,纵向加速度a的变化率即冲击度:
(15)
在转向行驶时,既要考虑整车动力性的需求,又要满足车辆对于横摆力矩的要求。以车辆的操纵稳定性作为首要考虑对象,正确合理的驱动力转移能够使车辆更好地保持驾驶者的期望轨迹,约束如下:
Fxx1+Fxx2+Fxx3+Fxx4=maxc
(16)
(Fxx2-Fxx1)a+(Fxx4-Fxx3)b=Mz
(17)
(18)
上层控制器以理想的横摆角速度跟随为控制目标,利用PID控制策略得出车辆所需的横摆力矩,它通过期望横摆角速度同实际横摆角速度的偏差得到车辆的调整横摆力矩。
以稳态横摆角速度值作为ωrd的控制目标:
(19)

整车横摆角速度偏差为
Δω=ω-ωrd
采用PID控制横摆角速度跟随控制,如下:
(20)
式中:kpω、kiω、kdω分别为比例、积分和微分增益系数;Kω为横摆角速度-需求扭矩-目标电流转化因子。
此外,在考虑以上智能扭矩分配策略时,还需考虑策略与整车其他性能,如NVH性能、转向干涉等的匹配等。
4 整车标定测试
为了验证智能扭矩分配策略的有效性,同时对算法进行标定优化,以某款中大型SUV为研究对象,将制定的智能扭矩分配策略移植到控制器中,在标准雪地广场开展动力性及操纵稳定性试验,并以雪地直线加速、蛇行及转弯加速工况为例验证考虑操纵稳定性的适时四驱扭矩分配策略的有效性。图3为装有V-Box的汽车性能测试图片。

图3 整车标定测试
4.1 直线行驶工况
首先在雪直道上进行原地起步全油门加速试验,由于受前轮附着的影响,车辆在加速时,车辆前轮存在一定程度打滑,最大可达217 r/min。为了充分利用附着力,保证车辆保持最小滑移率,控制器通过控制扭矩管理器电流对后轴施加一定的后桥扭矩。施加扭矩控制后,如图4所示,车辆百公里加速时间由17.63 s提升为15.4 s。如图5所示,施加控制前后车辆前后轴最大转速差由217 r/min减小为116 r/min,车辆的打滑率降低及动力性明显提升。文中车辆不能完全抑制打滑的主要原因为车辆加速时轴荷转移、后桥输出四驱扭矩占比及整车NVH的限制。
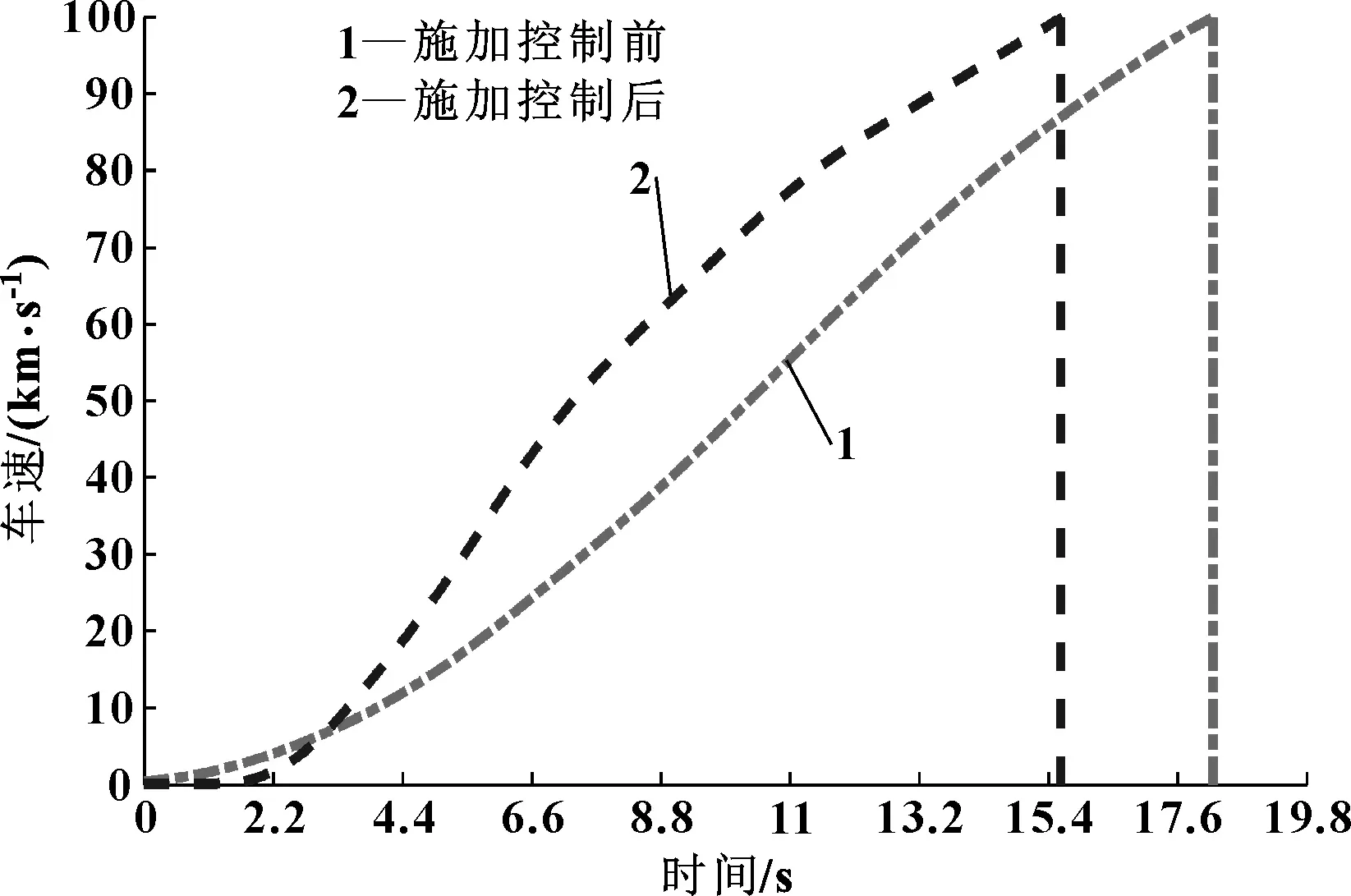
图4 施加控制前后百公里加速时间对比
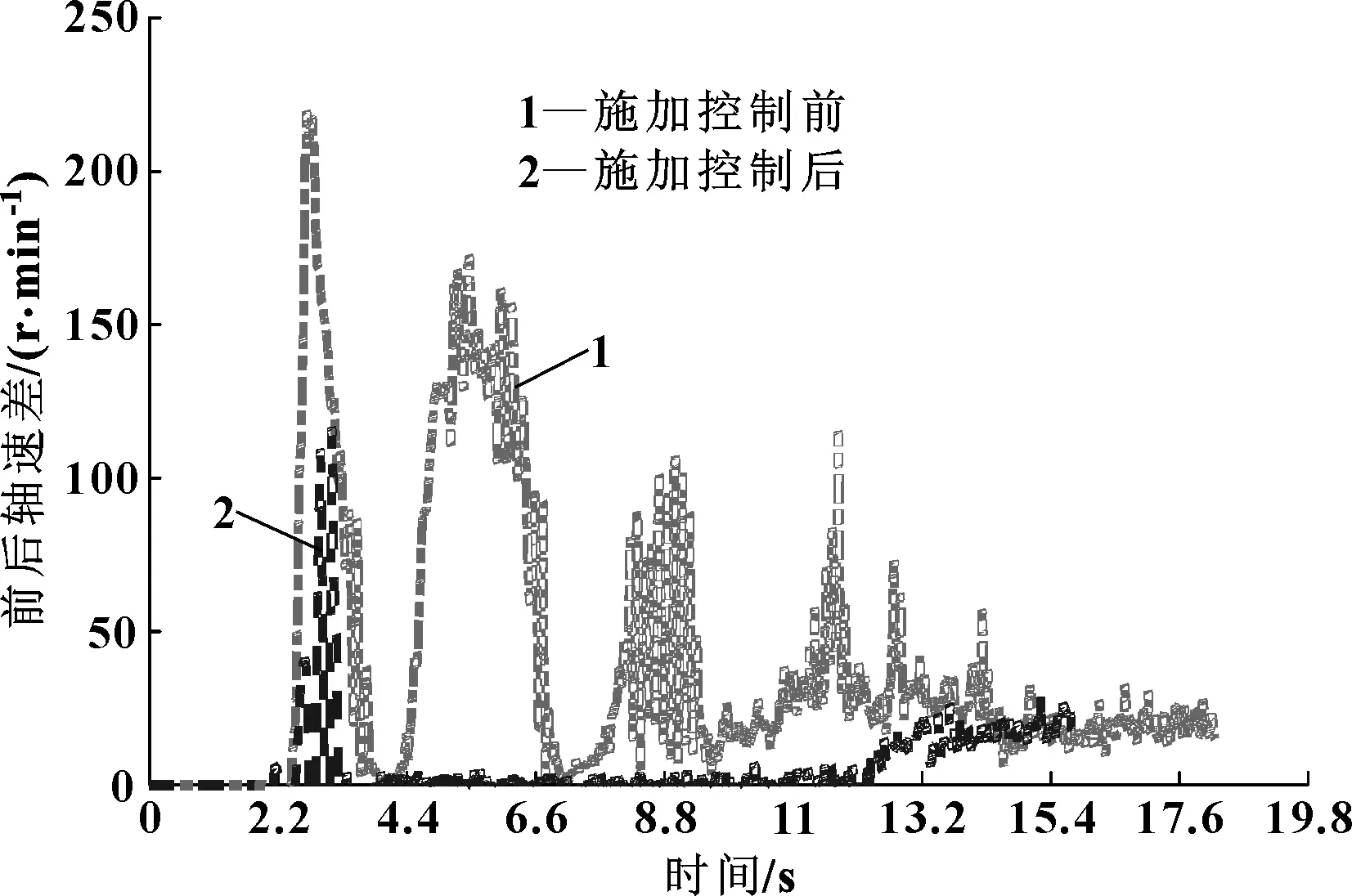
图5 施加控制前后前后轴速差对比
图6所示结合图4车速信号,可见施加控制后,四驱在车速小于70 km/h时均存在一定的四驱控制电流,以抑制车轮打滑,保证一定的动力输出,但在车速大于70 km/h时四驱电流较小,此时车轮打滑情况与施加控制前相当,向无扭矩控制时靠拢,70 km/h以上,四驱电流较小主要是考虑整车NVH性能。
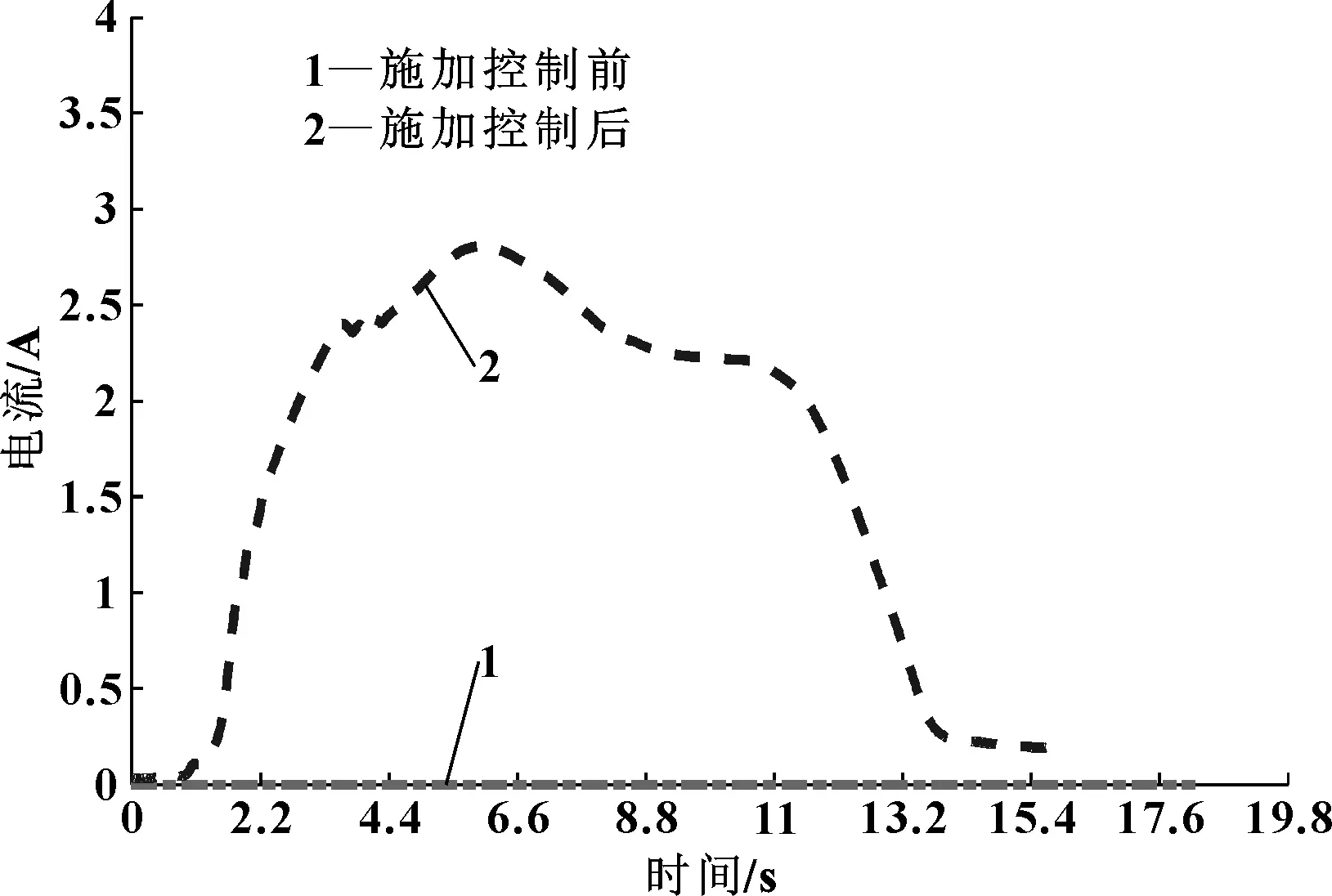
图6 施加控制前后前四驱控制器电流对比
在车辆加速时,由于要抑制车轮打滑,扭矩管理器需要迅速结合,扭矩管理器的迅速动作将给整车乘车舒适性产生不利影响,如图7所示,施加控制后整车的冲击度由施加控制前的峰值1.6 m/s3升为峰值5.1 m/s3(但仍然小于德国制定的冲击度上限值10 m/s3),冲击度峰值虽然增加,但主客观均表明,考虑冲击度的智能扭矩分配策略不会对整车乘坐舒适性产生明显不利影响。
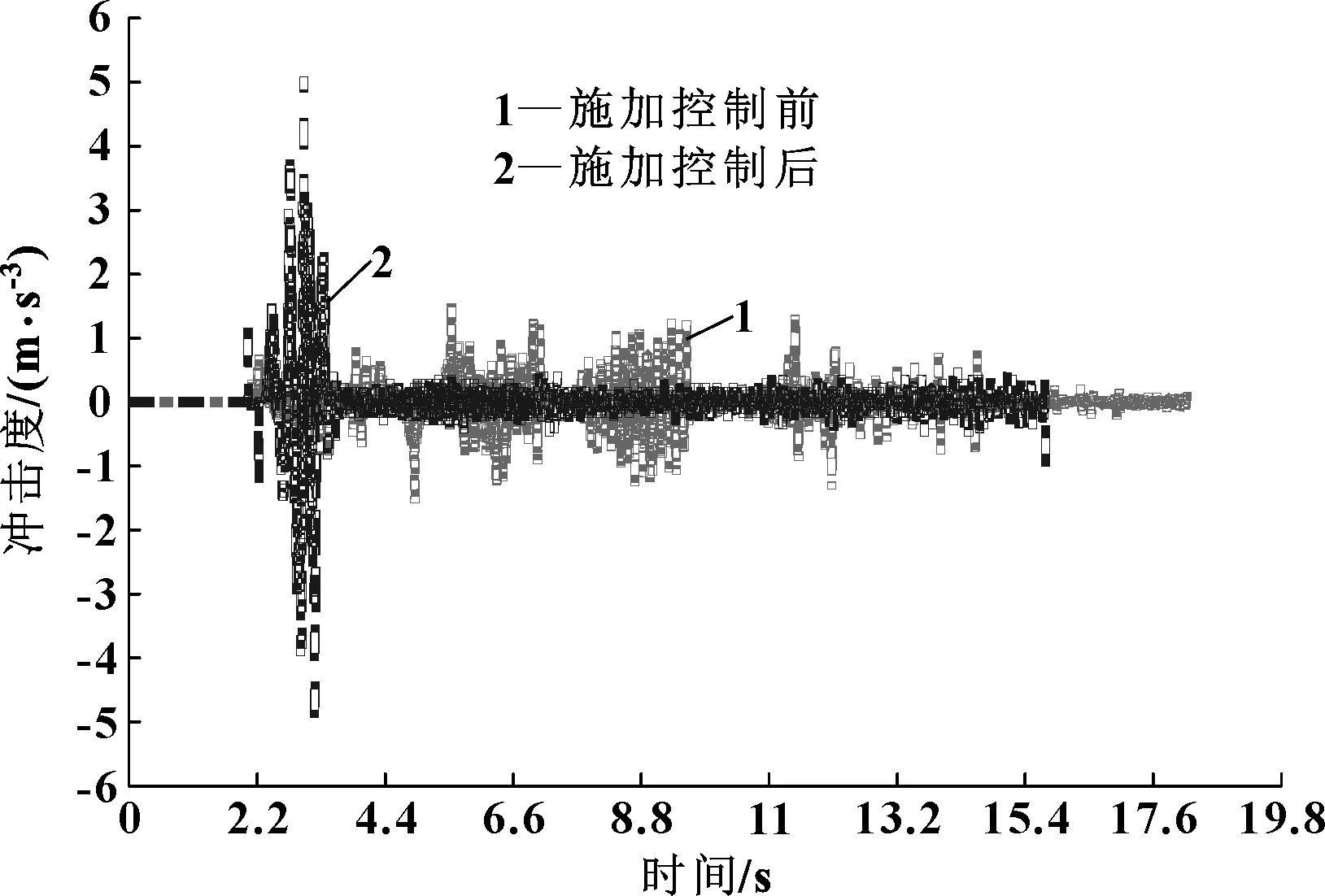
图7 施加控制前后整车冲击度对比
4.2 雪地转向行驶工况
雪地转向行驶时,两轮驱动汽车往往由于所需要的纵向动力性较大,而导致前轮不能提供足够的转向力满足转向需求,使车辆表现为严重的不足转向,而适时四轮汽车在考虑操纵稳定时,当监测到车辆不能按希望的轨迹行驶时,四驱控制器可以控制扭矩管理器以一定的后桥扭矩输出来改善车辆前轮驱动这种不足转向现象,提升车辆操纵稳定性。文中以车速稳定的蛇行工况及车速剧烈增加的转弯加速行驶工况为例进行实车测试。
4.2.1 蛇行工况
在雪广场上,以整车车速50 km/h的蛇形工况为例进行操纵稳定性标定试验。
如图8所示:考虑操纵稳定性控制策略施加前,车辆在t=6.4 s左右最大横摆加速度达到3.36 rad/s,与目标横摆加速度的最大差值为1.54 rad/s,车辆具有较为明显的不转向趋势。如图9所示:在施加操纵稳定性策略后,车辆的最大横摆角速度为2.72 rad/s,与目标横摆角速度的最大差值为0.96 rad/s。可见施加考虑操纵稳定性的智能扭矩分配策略后,四驱操纵稳定性有一定提升。
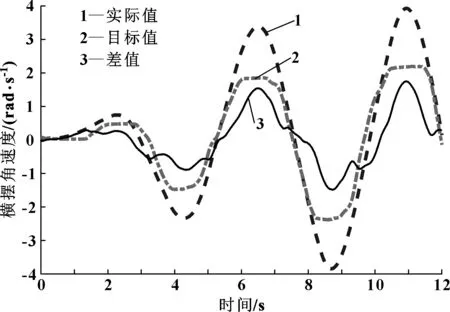
图8 考虑操稳控制前横摆角速度变化

图9 考虑操稳控制后横摆角速度变化
如图10所示:由于车辆以50 km/h车速稳定行驶,并不涉及车轮打滑,故考虑操纵稳定性策略施加前四驱控制器不施加目标扭矩;但当考虑操纵稳定性控制策略后,四驱控制器根据操纵稳定性需要,按需提供给扭矩管理器一定电流,保证车辆具有一定的后桥扭矩输出,改变车辆操稳特性。
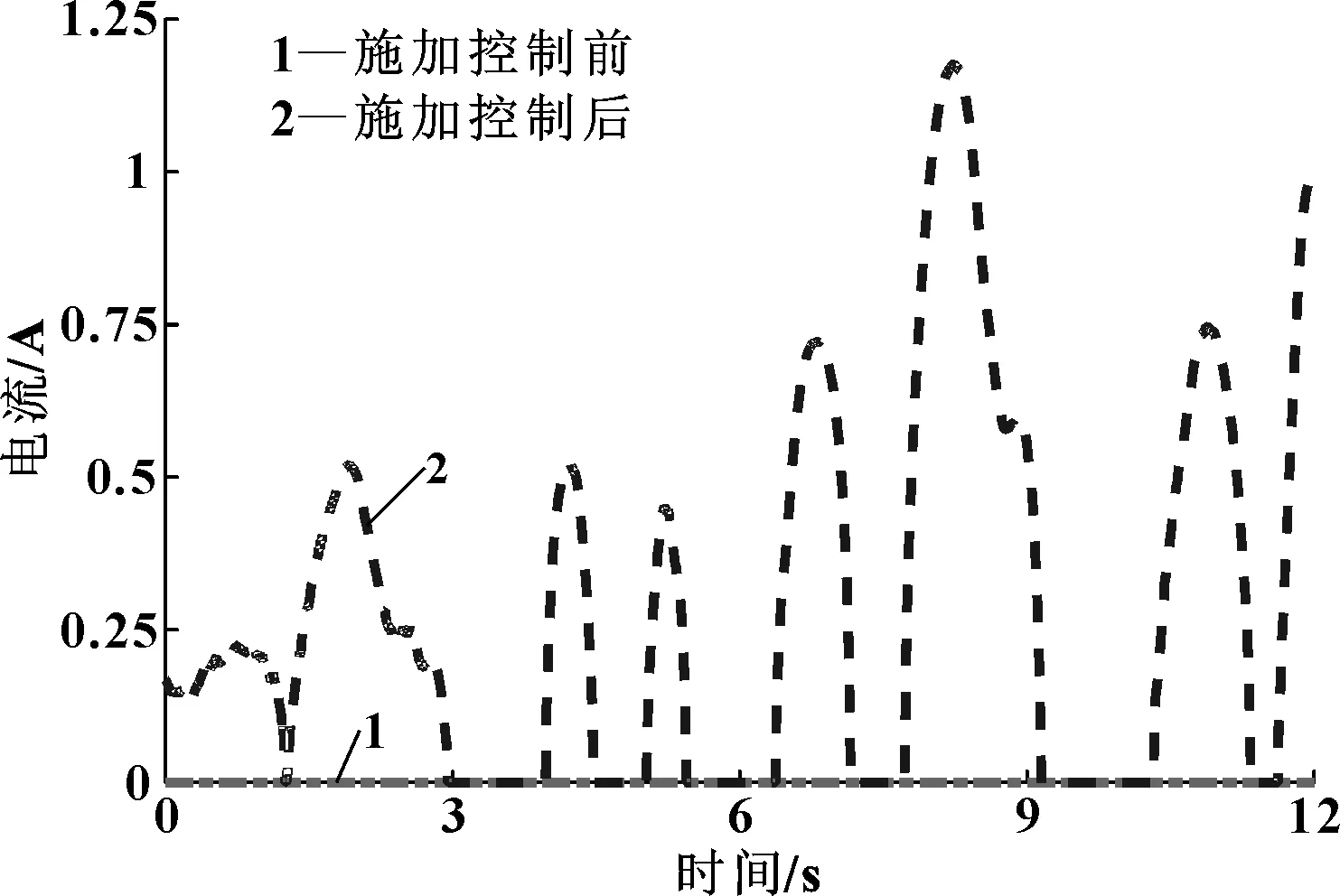
图10 考虑操稳控制前后四驱控制器电流对比
4.2.2 转弯加速工况
在雪广场上,调整方向盘转角至90°,稳定车辆速度至30 km/h,然后全油门加速,直至车辆失稳,主要评估车辆极限稳定能力。
如图11所示:在雪广场急转弯工况下,不考虑操纵稳定性控制时,由于前轮需要足够的纵向驱动力保证车辆加速度,导致车辆侧向动力学较差,整车横摆角速度明显大于目标横摆角速度,最大横摆角速度达7.8 rad/s,车辆呈现出明显的不足转向特性,此时的四驱扭矩输出主要用来抑制车轮打滑。施加控制后,为了改善车辆失稳的趋势,四驱控制器根据车辆实际横摆角速度与估算目标横摆角速度的差异,同时通过图12所示的控制器电流,对预施加一定的目标扭矩,最大限度、最迅速传递保证后桥扭矩输出,此时最大横摆角速度差值为1.3 rad/s,对操纵稳定性有一定改善,但车辆仍然无法完全跟随目标横摆角速度,表明通过桥间直接横摆力矩控制可改善车辆的操纵稳定性,但与轮间直接横摆力矩控制效果存在差距。
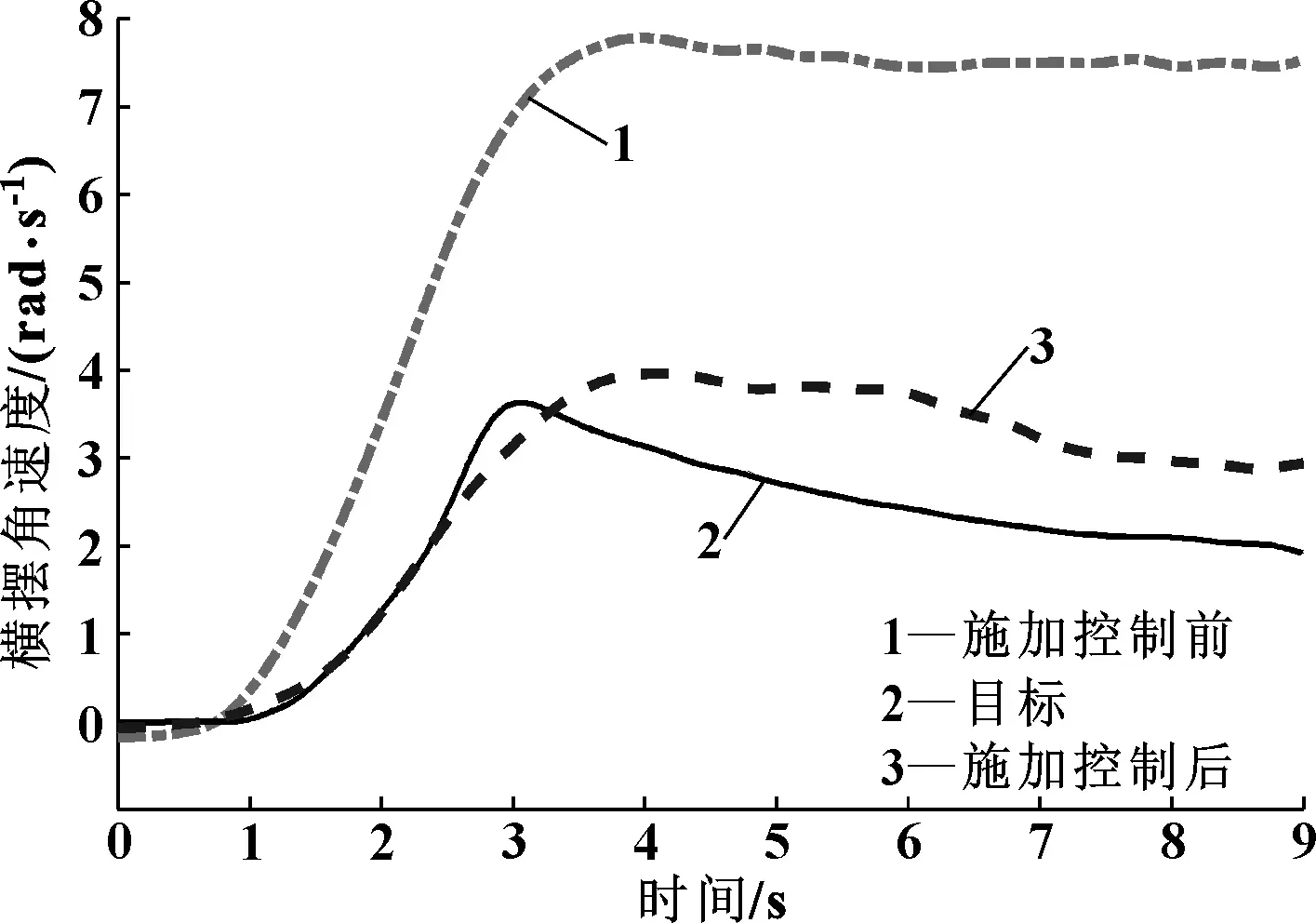
图11 操稳控制策略施加前后的横摆角速度变化
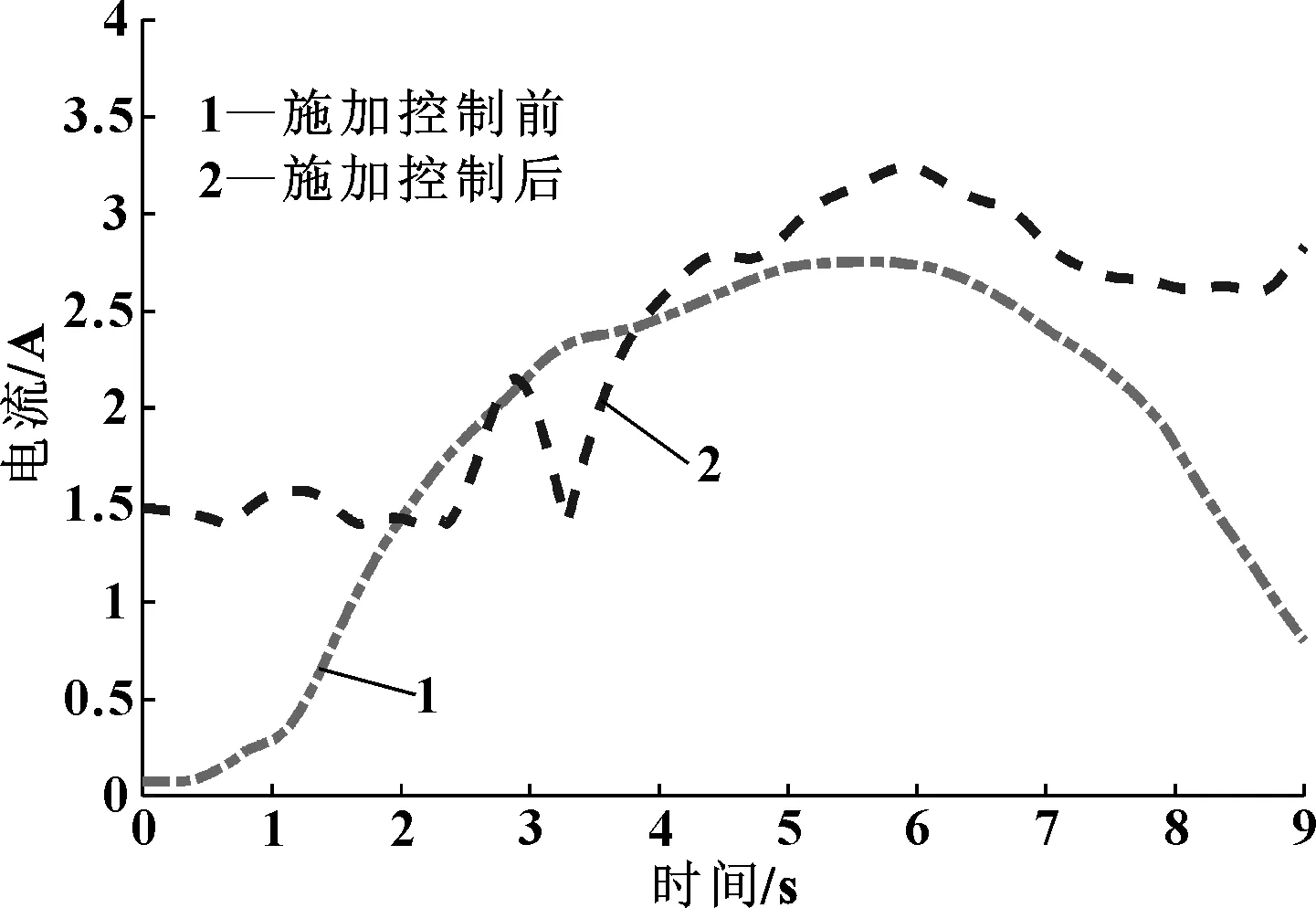
图12 操稳控制策略施加前后电流变化
5 结论
利用PID控制,提出以横摆角速度跟随及最小滑移率为控制变量的适时四驱扭矩分配策略,通过实车试验得到如下结论:
(1)该智能四驱控制策略在兼顾动力性的同时,充分利用后轴富余的附着条件,通过前后轴产生的直接横摆力矩控制可以提高弯道行驶能力,进一步提高汽车的操纵稳定性;
(2)所设计的考虑操纵稳定性的智能扭矩分配不会因为产生突然的纵向加速度而影响驾驶舒适性,同时兼顾整车NVH性能;
(3)相比于通过车轮制动力改善四驱车辆操作稳定性,通过四驱改善操纵稳定性效果稍弱。但通过后桥辅助驱动这种避免制动的方式来提升整车操纵稳定性,有利于整车燃油经济性及避免整车因ESP过早介入导致的动力丢失。
