同步式GPS欺骗干扰信号生成技术研究与设计
2020-06-01柳亚川寇艳红
柳亚川,寇艳红
(北京航空航天大学 电子信息工程学院,北京100083)
目前,无人机技术日趋成熟,应用迅速增多,飞行频次和飞行范围急剧增加,在提供方便的同时对于飞行安全提出了巨大的挑战[1]。民用无人机价格低廉、购买途径众多、操作门槛低、对起飞环境要求低,当前出现了大量黑飞无人机,一些未经审核的黑飞事件造成了严重的恶性影响,因此有必要对无人机实施监测,必要时进行强制管控。从GPS欺骗干扰技术着手管制无人机,具有较强的威胁性和隐蔽性,正逐渐成为当下无人机管制研究领域的热点之一[2]。
GPS欺骗式干扰可分为转发式欺骗干扰和生成式欺骗干扰[3-5]:前者通过对真实卫星信号的延迟和转发达到欺骗目的,后者则通过自主生成携带虚假导航信息的卫星导航信号实现欺骗。根据所生成欺骗信号是否与真实卫星信号同步,又可将生成式欺骗干扰分为异步生成式与同步生成式欺骗干扰[6-8]。异步生成式欺骗干扰技术相对较为成熟,可由卫星导航射频信号模拟器实现,但一般需要借助于压制式干扰阻断接收机对真实卫星信号的跟踪,在确保干扰区域内接收机重新进入搜索捕获状态后才可有效实施欺骗干扰;而同步生成式欺骗干扰则可在接收机正常跟踪真实卫星信号的状态下无需压制而引导接收机逐渐偏离真实信号,控制目标接收机的定位测速,因而更难以被目标接收机所察觉。由于同步生成式欺骗干扰技术较为复杂,目前公开的相关文献中,大多只是通过理论分析和软件仿真对欺骗干扰进行验证[9-11],缺乏真实场景下的设计验证以及实验测试[12]。
本文旨在研究同步式GPS欺骗干扰信号生成技术,建立了同步GPS欺骗信号的数学模型,给出了信号参数仿真、信号同步及诱骗方法;在此基础上,基于数字信号处理(Digital Signal Processing,DSP)芯片和现场可编程逻辑门阵列(Field Programmable Gate Array,FPGA)架构研制了一种小型化的同步生成式GPS欺骗干扰源。最终通过室内商用接收机测试和室外商用无人机测试,在接收机和无人机锁定真实卫星信号以及不使用高功率干扰压制的前提下,开启干扰源,发射欺骗信号,成功诱使接收机和无人机逐渐偏离真实定位测速结果而输出预设的定位测速结果,从而验证了信号模型和诱骗方法的正确性以及所设计同步式GPS欺骗干扰源设备的有效性。
1 同步生成式GPS欺骗干扰
1.1 GPS欺骗干扰源总体设计
在实验室已有的异步生成式GPS欺骗干扰源基础上[13],本文所设计的便携式小型化同步生成式GPS欺骗干扰源组成框图如图1所示(1PPS为秒脉冲),主要由信号处理模块、参考接收模块、上变频及射频调理模块、上位机主控模块组成。信号处理模块采用DSP+FPGA的架构,完成欺骗信号仿真计算并生成中频欺骗信号;参考接收模块以某款授时型接收机为基础,完成干扰源系统时和真实卫星系统时的同步,并提供时基信号、时间信息、位置信息和导航参数等给信号处理模块;上变频及射频调理模块完成中频信号的上变频和信号调理;上位机主控模块实现人机交互以及与导航诱骗系统中其他组件(如目标侦测系统)的数据交互和命令控制。
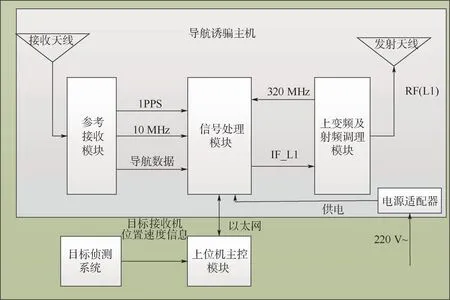
图1 同步生成式GPS欺骗干扰源组成框图Fig.1 Block diagram of synchronous generator GPS spoofer
1.2 同步生成式GPS欺骗干扰信号的生成
1.2.1 欺骗信号模型
在GPS系统时t时刻欺骗干扰源所发射的射频信号可表示为[13-14]

式中:t为信号发射时刻的GPS系统时;N(t)为对应t时刻的目标接收机处可见卫星数;Pjs(t)为第j颗可见星信号功率;Cj(t-τj(t))为第j颗可见星的伪随机码;τj(t)为t时刻伪随机码传播延时;Dj(t-τj(t))为第j颗可见星导航电文数据;φj(t)为第j颗可见星载波相位;n(t)为随机噪声。
1.2.2 初始同步阶段的信号参数计算
同步生成式GPS欺骗干扰源能够生成当前目标接收机所有可见星的同步欺骗信号,欺骗信号到达目标接收机天线相位中心处的功率、码相位、载波多普勒和载波相位与真实信号的对齐误差要限制在一定的范围之内。同步生成式GPS欺骗干扰源根据本地授时型接收机提供的信息和时基信号计算并控制所仿真各历元时刻各颗卫星欺骗信号的功率、码相位、载波多普勒和载波相位参数,生成相应的射频欺骗信号通过发射天线向目标空域发射出去。
1)功率
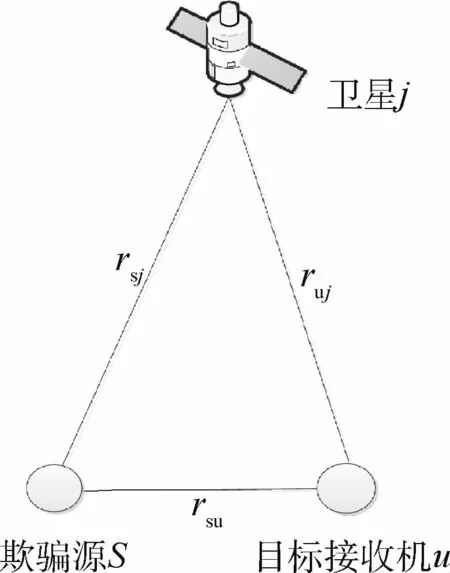
图2 功率计算示意图Fig.2 Schematic diagram of power calculation
图2为功率估计示意图,其中rsj为卫星发射天线相位中心到欺骗干扰源接收天线相位中心的距离,ruj为卫星发射天线相位中心到目标接收机接收天线相位中心的距离,rsu为欺骗干扰源发射天线相位中心到目标接收机接收天线相位中心的距离。干扰源与目标接收机均使用全向接收天线。
通常rsj和ruj均远大于rsu,到达欺骗干扰源接收天线相位中心和目标接收机接收天线相位中心的卫星信号功率近似相等,因此由干扰源处卫星信号功率估计目标接收机处卫星信号功率。
干扰源仿真的第j颗可见星信号功率计算公式为

式中:Pju(t)为t时刻真实卫星信号功率,可由本地授时型接收机估计;ΔPj(t)为根据同步诱骗策略需要添加的欺骗信号相对于真实卫星信号功率的增量;GT(t)为欺骗干扰源发射天线增益;λ为信号波长。
2)码相位
t时刻干扰源所仿真第j颗可见星的码相位延迟可由下式进行估计:欺骗信号相对真实卫星信号码相位的增量。

式中:F=-4.442 807 633×10-10s/m;e为卫星轨道偏心率;A为卫星轨道的半长轴;Ek(t)为卫星轨道的偏近点角[15]。
在初始同步与功率增强阶段,以及动态调整阶段,码相位增量Δτj(t)的取值不同,具体分析见1.2.3节。
区别于普通模拟器,如图3所示,同步生成式GPS欺骗干扰源需要精确控制到达目标的信号状态,相应地需要精确控制欺骗信号发射时刻(GPS系统时)。由干扰源本地授时型接收机可以获得其接收天线接收真实卫星信号的时刻,而该时刻到干扰源发射天线发射欺骗信号时刻的延时td(称为诱骗系统信号处理延时)则可事先标定,然后在信号产生过程中予以补偿。
3)载波多普勒

图3 码相位计算示意图Fig.3 Schematic diagram of code phase calculation
1.2.3 信号同步及诱骗方法
1)时基同步
欺骗信号与真实卫星信号同步精度取决于干扰源的欺骗信号参数计算和控制精度以及干扰源控制信号发送时刻的精度。时基同步是为了保证欺骗干扰源与真实卫星系统时保持时间上的同步,并能够标定和校准从接收卫星信号到发送欺骗信号的时延td。
为了实现时基同步的功能,本文方案采用一个本地授时型接收机,能够提供精度满足要求的驯服后的基准时钟和1PPS信号。干扰源通过本地授时型接收机读取当前GPS时,并利用1PPS信号和10 MHz时钟作为FPGA数字信号合成和射频模块信号输出的时基和时钟源,实现干扰源本地时钟和真实卫星系统时的同步;同时依据1.2.1节的欺骗信号模型和信号参数估计方法,计算导航观测量和电文参数,并通过高阶直接数字频率合成(Direct Digital Synthesis,DDS)技术精确控制信号状态,高阶DDS使用FPGA片内资源,进行多级调整,精确地模拟由卫星和接收机相对运动引起的多普勒变化,保证欺骗信号到达目标接收机接收天线相位中心时与真实信号的相位状态在成功诱骗所允许的误差范围之内。
2)目标接收机跟踪环路的俘获

图4 欺骗信号俘获跟踪环路示意图Fig.4 Schematic diagram of tracking loop captured by spoofing signal

鉴于目前大多数GPS接收机所采用的3阶或3阶以下载波跟踪锁相环路(PLL),以及恒定速度的突变会引起欺骗信号多普勒突变,易被接收机检测识别[15],因此本设计欺骗信号采用初始速度为0的匀加速动态调整策略,并在速度达到最大值后,保持不变,即

式中:vmax为最大速度;a为加速度,其大小受限于接收机PLL噪声带宽以及PLL更新周期。
欺骗信号动态调整过程,若加速度和最大速度增大,则需增大欺骗信号的功率保证成功欺骗目标接收机[16],因此欺骗信号加速度和最大速度不应设置过大。
2 实验分析
为了验证上述模型的正确性及方法和设计的可行性,本文首先在室内利用商用接收机进行了静态诱骗实验,然后在室外利用商用无人机分别进行了静态和动态诱骗实验。其中室外无人机动态诱骗实验参数具体设置见2.2节无人机动态诱骗测试部分;而室内商用接收机及室外无人机静态诱骗实验参数设置如下:
1)初始同步与功率增强阶段
欺骗信号初始仿真位置为目标接收机真实位置pu(t+τsu),仿真的接收机动态速度为0,加速度为0;初始欺骗信号功率低于真实卫星信号功率,功率增加速率为2 dB/s,持续时间为8 s。
2)动态调整阶段
欺骗信号功率保持初始同步阶段最大功率,改变欺骗信号所仿真的目标无人机的动态,在地心固地坐标系(ECEF)直角坐标系下x方向初始速度为0,加速度为0.2 m/s2,最大速度为3.8m/s,y方向和z方向速度恒为0。
2.1 室内商用接收机诱骗测试
1)码相位同步精度测试
使用2个商用接收机(Trimble Mini-TTMGG和NovAtel OEM615)分别接收真实卫星信号和干扰源欺骗信号,输出秒脉冲,使用TDS3052B示波器测试2个秒脉冲的对齐精度,接收干扰源欺骗信号接收机输出的秒脉冲与接收真实卫星信号接收机输出的秒脉冲对齐误差的测试结果截图如图5所示,测试阶段为初始同步与功率增强阶段。
多次测试结果表明2个接收机输出的秒脉冲对齐误差小于100 ns,即0.1个码片;这保证了干扰源产生的欺骗信号与真实卫星信号到达目标接收机时的时间同步[2,10,17]。
2)载噪比测试
在一定的热噪声背景下,卫星信号绝对功率的变化直接体现在射频信号载噪比的变化上[18],本文通过测试接收机接收信号载噪比变化验证欺骗信号功率变化对接收机跟踪环路的影响,测试阶段为初始同步与功率增强阶段。
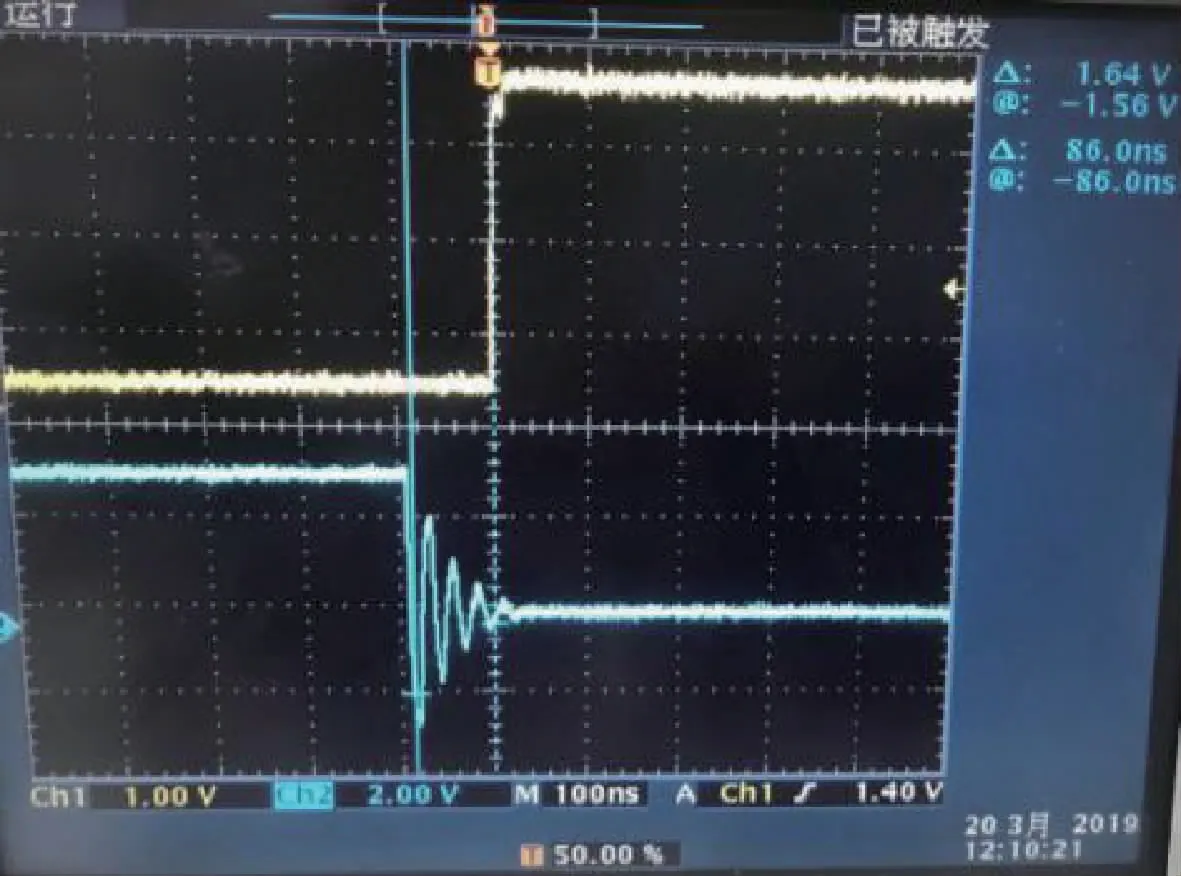
图5 秒脉冲误差测试结果Fig.5 Test results of 1PPS error
采用北京卫信杰科技发展有限公司的W 220接收机作为室内测试的目标接收机,其射频输入端同时连接干扰源射频输出与实验室屋顶天线;起初只接收真实卫星信号,待接收机稳定输出真实坐标(39.978 635°N,116.344 224°E,70mH)后,在不对此接收机进行压制干扰的前提下,开启干扰源,首先输出低功率的同步欺骗信号,可观察到接收机定位不受影响,定位没有中断;然后在第5 s开始逐步增加干扰信号功率,每秒增加2 dB,持续8 s,随后保持功率不变。读取接收机所记录的每秒一次的可见星PRN8、PRN21、PRN26载噪比如图6所示。
以PRN8载噪比为例,由图6可见,在第1~4 s干扰源发射低功率欺骗信号,接收机所跟踪真实卫星信号的载噪比均不超过43 dB·Hz;第5~6 s欺骗信号功率增加但仍低于真实卫星信号功率,接收机跟踪环路保持锁定真实卫星信号,所估计载噪比没有明显变化;第7~12 s欺骗信号功率高于真实卫星信号功率,接收机跟踪环路锁定欺骗信号,因此接收机所估计载噪比随欺骗信号功率提高而提高。值得注意的是,实验中发现欺骗信号高功率入侵诱骗成功的概率更高,而低功率入侵有时会引起定位中断,其原因是干扰源所发射欺骗信号很难做到与真实卫星信号载波相位完全同步,在相差较大甚至反相的情况下容易引起信号短暂失锁。
3)接收机定位测速诱骗测试
初始设置及信号功率变化与载噪比测试设置一致,随后从第30 s开始逐步增加干扰源所仿真目标在ECEF直角坐标系下x方向上的速度,初始速度为0,加速度为0.2m/s2,持续时间为19 s,y方向和z方向速度保持为0,实验结果如图7所示。由图中可知,接收机定位测速结果与预设轨迹速度相吻合,接收机被成功诱骗到干扰源所预设的定位测速结果。

图6 载噪比测试结果Fig.6 Test results of carrier to noise ratio
2.2 室外无人机诱骗测试
1)无人机静态诱骗测试
实验场地为北京航空航天大学,使用的无人机为大疆创新科技有限公司的PHANTOM 4 PRO

图7 接收机定位测速结果与预设轨迹速度的比较Fig.7 Comparison of receiver position and velocity results with preset trajectory and velocity
无人机。首先使无人机接收真实卫星信号,在定位之后且不对无人机进行压制的前提下,打开干扰源发射欺骗信号,诱骗方法同室内测试相同。采用DJI Assistant 2调参软件来观测无人机传感器给出的飞行轨迹,软件所显示的无人机定位位置偏离起始点的距离随运行时间的变化如图8所示。可见无人机定位一直没有中断,在开启干扰源后逐步锁定到欺骗信号,从图8中的第72 s开始其输出的定位位置发生移动。由于无法从DJI Assistant 2软件导出无人机定位轨迹的记录数据,本文同时使用了W 220接收机与无人机一起进行诱骗实验。图9(a)对比了W 220接收机定位轨迹和干扰源预设欺骗轨迹;图9(b)对比了无人机偏离起始点距离(由图8读数绘制而成)以及W220接收机定位结果偏离起始点的距离。

图8 DJIAssistant 2所显示无人机偏离起始点的距离Fig.8 Distance of UAV deviated from origin disp layed by DJIAssistant 2
由图8和图9可见,W220接收机输出的定位测速结果与预设的欺骗轨迹相符合;无人机配套软件所输出偏离起始点的距离与接收机定位结果偏离起始点距离相符合,可说明在开启干扰源后,无人机定位未中断,由锁定真实卫星信号转而锁定欺骗信号,并且输出干扰源预设的欺骗轨迹,无人机欺骗成功。
2)无人机动态诱骗测试
无人机动态诱骗实验设备及环境如图10所示,实验场地为北京市沙河非禁飞区,通过无人机定位,显示当地真实坐标为(40.176 698°N,116.269 926°E)。
图11(a)为无人机动态诱骗实验的场景设计(VUAV为 无 人 机 初 始 速 度,Vs为 欺 骗 速 度),图11(b)~(d)给出了实验过程中无人机通过关键轨迹点的视频截图。
首先通过无人机遥控软件DJI GO 4预设无人机匀速由A点(40.176 698°N,116.269 926°E)飞往B点(40.176 582°N,116.269 952°E),飞行速度为0.3m/s。在不对无人机进行压制干扰的前提下,开启干扰源,首先输出低功率的同步欺骗信号,可观察到无人机由预设的起始位置即图11(b)中的A点向预设的B点方向正常飞行(若欺骗信号引起无人机接收机失锁,则无人机会悬停),在飞行时刻第5 s开始逐步增加欺骗信号功率,每秒增加2 dB,持续8 s,随后保持功率不变,第12 s无人机飞行至C点(40.176653°N,116.269 930°E),如图11(c)所示;随即逐步增大干扰源所仿真目标在东北天坐标系下的东向速度Ve,初始速度为0,加速度为0.2m/s2,持续时间为5 s,北向和天向速度为0;可观测到无人机飞向D点(40.176707°N,116.269967°E),偏离预设飞行路径,如图11(d)所示,说明欺骗信号获得了跟踪环路主导权,无人机诱骗成功。因为无法从DJI Assistant 2软件导出无人机定位信息,所以无法对无人机飞行轨迹进行进一步的数据分析。

图9 轨迹和偏离起始点的距离Fig.9 Trajectory and distance deviated from origin

图10 无人机外场实验设备及环境Fig.10 UAV field experimental equipment and environment

图11 无人机动态诱骗实验场景Fig.11 Dynamic experimental scenario of UAV spoofing
值得注意的是,无人机导航飞控系统融合了卫星导航、惯性导航、视觉导航、气压计等多源传感器信息,无人机卫星导航接收机受到干扰源欺骗信号影响后,无人机仍然可以获取其余传感器信息,因此若要进一步控制无人机飞行轨迹,还需结合无人机导航飞控系统控制策略,这将是下一步研究工作的难点所在。
3 结 论
1)设计实现了一种小型化的同步生成式GPS欺骗干扰源,建立了同步式GPS欺骗干扰信号模型,给出了信号仿真参数的计算方法,采用时基同步的方法补偿了干扰源的处理时延,通过商用接收机验证了GPS欺骗干扰信号模型及同步设计的正确性。
2)给出了干扰信号俘获目标接收机跟踪环路过程中欺骗信号参数的调整方法,并通过商用接收机和无人机进行了静态和动态实验验证,结果表明该方法能够使干扰源在不需要压制干扰阻断目标接收机跟踪环路的情况下成功俘获跟踪环路的主导权,最终使目标接收机输出预设的定位测速结果,验证了该方法的可行性。
为了提高诱骗成功率,并能够诱骗无人机在防护区范围内飞往预设的诱骗位置,需要在本文工作基础上针对初始载波相位误差而优化诱骗策略,并进一步分析无人机导航飞控系统,结合其飞控策略和测控链路设定合理的诱骗策略,并通过动态飞行实验验证其效果。