带随机网络时滞补偿的测功机动态负载模拟*
2020-05-28马瑞海王丽芳张俊智何承坤
马瑞海,王丽芳,张俊智,何承坤
(1.中国科学院电力电子与电气驱动重点实验室,北京 100190; 2.中国科学院电工研究所,北京 100190;3.中国科学院大学,北京 100049; 4.清华大学,汽车安全与节能国家重点实验室,北京 100084)
前言
随着能源危机和环境污染的日益严峻,纯电动汽车、混合动力汽车和燃料电池汽车的节能与环境友好型汽车逐渐成为汽车产业研发的热点[1]。作为电动汽车关键技术之一,电机再生制动可协同摩擦制动共同满足制动需求。正常行驶工况下,电机再生制动可回收部分车辆动能,有效改善车辆经济性[2-3];另外,电机驱、制动转矩响应迅速且控制精度高,在极端行驶工况下,电机再生制动参与防抱死制动控制可有效改善车轮滑移率控制性能,提高车辆安全性[4-5]。相关制动控制算法实际应用前,须进行大量测试工作;台架测试作为整车控制技术开发流程的关键环节,具有测试周期短、成本低和安全可靠的优势[6],得以广泛应用。典型的车辆动力系统试验台将待测车用电机与测功机共轴连接[7-9],测功机模拟动力系统机械负载。测功机动态负载模拟水准直接决定了台架测试的准确性和可信度[10]。因此,必须保证测功机高精度的负载模拟以适应电动汽车不同的测试需求。
目前,国内外学者在机械负载模拟方面已有深入研究,主要基于逆向模型和前向模型来实现[11]。基于逆向模型的方法利用待测机械系统逆动力学模型或试验台逆动力学模型来计算期望负载转矩;该方法涉及微分项,在模拟动态变化较快的负载时易因引入微分误差而导致系统振荡[12-13]。基于前向模型的方法,又称前馈速度跟踪控制,采用系统前向模型计算待模拟系统运动特性,并控制测功机闭环跟踪待模拟系统的响应;该方法稳定性好,是目前应用广泛的负载模拟方式[14]。基于速度跟踪控制的方式,国内外学者在测功机动态加载控制策略上做了大量研究和探索,其中具有代表性的有自整定PI控制[15]、动力学补偿控制[6,16]、抗扰控制[17]、滑模控制[18]、基于模型预估补偿的动态解耦控制[19]以及智能控制[20-22]等,以上算法均在不同方面提高了测功机负载模拟性能。但上述负载模拟算法均是围绕传统点对点的通信控制系统进行开发,未考虑控制网络传输时滞的影响,难以适用于网络化测功机加载控制中。
在网络控制系统中,传感器、控制器和执行器均通过通信网络(如控制局域网CAN)进行信息交互。与传统点对点连接的控制系统相比,网络控制系统具有较多优势,如系统灵活性高、可实现远程操作与维护等[23]。但由于通信网络的带宽有限,信息交互产生的网络诱导延时将恶化系统的控制性能,甚至使系统失稳[24]。鉴于以上原因,为进一步提高测功机网络控制系统负载模拟性能,文献[25]中提出了一种基于Smith预估器的网络延时补偿算法,仿真和台架试验印证了该方法的有效性。但是,Smith预估器严重依赖系统精确模型,当控制系统模型参数严重失配时,不具备应用价值。因此,仍须进一步研究具有随机网络延时补偿且鲁棒性好的测功机网络控制系统负载模拟算法。
本文中针对随机网络时滞恶化测功机网络控制系统负载模拟性能的问题,提出了一种补偿随机网络时滞的测功机负载模拟算法。首先,建立车辆—台架耦合动力学模型以及随机网络延时模型;然后,基于上述模型,设计了随机网络延时补偿的负载模拟算法;最后,给出了防抱死制动过程台架测试的仿真结果,并与PI控制进行对比分析,得出结论。
1 系统建模
1.1 车辆动力学模型
以集中式前驱电动汽车为例,建立车辆纵向动力学模型。电机转矩响应特性建模为1阶惯性环节:

式中:Tm为车用电机实际转矩;Tmref为车用电机转矩参考值;τm为转矩响应时间常数。
液压制动系统精确模型参考文献[4]建立,轮胎模型采用 Pacejka魔术公式[26]。不考虑道路坡度,各车轮动力学方程可表示为

式中:i取1或2,表示前轴或后轴;j取1或2,表示左轮或右轮;Jw为车轮转动惯量;ωwij为车轮角速度;Tij为车轮处电机驱、制动转矩,T1j=Tmi0/2,T2j=0;Thij为车轮处液压制动转矩;Fxij和Fzij分别为地面给轮胎的纵向力和法向力;r为车轮半径;f为滚动阻力系数。车身纵向动力学方程可表示为

式中:m为车辆质量;v为车速;Fair为空气阻力。
车轮纵向滑移率定义为

1.2 台架动力学模型
车用电机与测功机刚性共轴连接。沿车用电机至测功机轴向,取顺时针方向为车用电机转速和转矩的正方向,逆时针方向为测功机转速和转矩的正方向。因此,台架状态空间模型可表示为

式中:x=ωd为系统状态变量,ωd为测功机转速且ωd=-ωm;u=Td为系统控制输入,Td为测功机转矩;q1=Tm为系统外部扰动;A、B1和B2为系统参数,且A=-b/J,B1=1/J,B2=-1/J,J=Jm+Jd,b=bm+bd,Jm、Jd、bm和bd分别为车用电机和测功机的转动惯量和摩擦因数。
1.3 随机网络延时模型
围绕随机网络延时模型已展开大量研究[27-28],其中应用最普遍的是均匀概率分布模型[29-31]。该模型假设当前时刻的随机网络延时量为均匀分布在[0,dmax]范围内的某一随机数值。
根据CAN网络通信协议,对于同一地址下的消息在时间顺序上后发送的消息不会早于先发出的消息到达接收节点。kTs时刻信息延迟量可表示为

式中:dmax为CAN网络最大延时;Ts为控制系统采样周期。dmax与CAN网络拓扑结构、网络通信速率等因素有关。结合文献[29]~文献[31]中的结论和CAN网络延时的实际测试结果,仿真中取最大延时dmax=1.7Ts。
2 控制算法设计
2.1 台架网络控制系统负载模拟方案
以速度跟踪控制来模拟待测动力系统机械负载。台架系统见图1,它由双电机系统、传感器部分、CAN网络通信模块和控制器单元4部分构成。
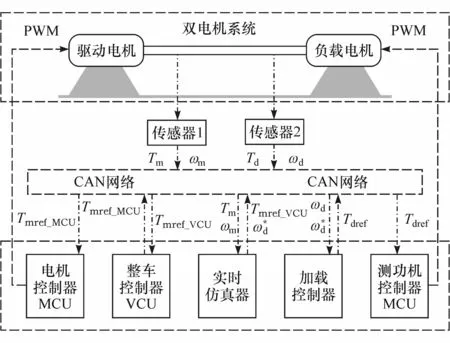
图1 台架网络控制系统
传感器监测电机转矩和转速,通过CAN网络传递给实时仿真器,内置车辆动力学模型在线计算动力系统运动状态ω*d和电机目标转矩Tmref_VCU;转矩命令Tmref_VCU经VCU和MCU闭环控制电机转矩;加载控制器调节测功机实际转速ωd跟踪参考值ω*d。
该系统采用CAN网络进行数据交互,现对系统做如下假设。
(1)传感器是时间驱动模式,定周期测量系统输出并经由CAN网络发送采样数据至测功机加载控制器,传感器至控制器(S—C)通道延时产生。
(2)测功机加载控制器是事件驱动模式,它在接收到CAN网络传来的数据后,计算测功机目标转矩并经由CAN网络将其传递给执行器,控制器至执行机构(C—A)通道延时产生。
(3)执行器是事件驱动模式,它接收到控制器发出的控制指令后,控制测功机按给定的控制命令运行。
S—C和C—A通信延时构成一个控制周期内总的网络诱导延时量,这将进一步恶化负载模拟性能。
2.2 补偿随机网络时滞的负载模拟算法
随机网络时滞补偿基于预测控制结构[30,32]。在原有PI控制的基础上,对式(6)范围内所有可能的延时量dk设计一组控制参数,存储于控制器中。结合以上控制参数,控制器根据当前采样时刻系统状态计算一控制指令序列,并发送给执行机构。执行机构可通过通信协议中设置时间戳得到当前控制周期累积延时量,根据该延时数值在控制指令中选取对应的控制输入,完成网络延时的补偿。
2.2.1 问题的阐述
对式(5)进行欧拉离散化,得到台架测试系统离散状态空间模型:

受限于CAN通信网络带宽的限制,随机网络延时不可避免。以 dFF,k和 dFB,k分别表征 kTs时刻 S—C和C—A通道的累积网络延时。为方便算法设计,对以上网络延时做以下假设:
(1)定义在kTs时刻累积网络延时数值为dk,即 dk=dFF,k+dFB,k,κ={κ1,…κi…κs}为随机变量 dk取值范围,其中 0<κ1<…<κi<…<κs<Ndmax/Ts,且κi∈Z;
(2)控制器和执行器节点可通过时间戳获得当前控制周期的累积网络延时值dk;
(3)假设在kTs时刻系统累积网络延时为κi,定义向量 α(k)=[α1(k),…,αi(k),…αs(k)],其中

同时定义变量 αi(k)=1的概率为 βi。
上述对网络延时量假设的本质是对连续的延时变量离散化。假设kTs时刻累积网络延时为κi,反馈控制律可表示为

式中:e^k=rk-κi-yk-κi为测功机目标转速与实际转速间的差值;KP|κi和 KI|κi(i∈{1,2,…,s})是与累积延时相关的控制参数,须重新设计。
2.2.2 系统增广
为在系统中考虑随机网络延时,将式(7)进行扩维,使之包含表征网络延时的随机变量。定义新的状态变量和输出变量为
相应地,系统状态方程和输出方程为

其中
进一步地,跟踪误差反馈控制律可表示为

其中 Kκi=[KP|κiKI|κi]∈R1×2
实际控制过程中,控制器按照所设计的控制参数计算出一个控制指令序列Uk,并发送给执行机构。执行机构根据当前累积网络延时值dk=κi选取相应控制参数 KP|κi和 KI|κi对应的控制律。
为方便后续算法求解,须将式(11)系统状态方程表示为随机鲁棒控制问题的标准形式。因此,须将系统再次增广。通过将跟踪误差包含进状态变量的方法,将随机系统鲁棒跟踪问题转化为鲁棒镇定问题。定义新的状态变量为

基于以上状态变量,系统状态空间方程表示为
其中


E=[01×21 η 0 0 … 0]∈R1×2(s+1)(18)
式中η为常量系数。
2.2.3 稳定性分析与控制器设计
由于 αi(k)项的存在,式(15)系统为随机系统。须利用随机系统稳定性理论对系统进行分析。随机系统稳定性定义如下。
定义1:当系统满足如下条件时,称系统为随机稳定:对任意有界向量ξk及其初始值ξ0,存在正定矩阵W>0,满足

式中E为均值函数。基于以上定义,可以得到关于式(15)系统状态方程式的随机稳定性结论。
定理1:假设控制参数已知,当满足以下条件时,式(15)闭环系统状态方程随机稳定:存在对称正定矩阵 P=PT>0,满足

其中
选取李雅普诺夫函数 V(ξk,k)=ξTkPξk,其中矩阵P为李雅普诺夫权重矩阵。对李雅普诺夫函数进行差分得到
其中

根据式(22),可得
ΔV(ξk,k)≤-λmin(-Ω)ξTkξk≤-c‖ξk‖2(25)式中:c为矩阵-Ω最小特征值,即 λmin(-Ω)。结合式(23)可知:


当k趋于无穷大时,可得
式中W=P/c。根据定义1,式(15)系统状态方程式是随机稳定的,证毕。
定理1保证了测功机网络控制系统在无外界干扰且系统外部输入为零时闭环系统的随机稳定性。实际测试过程中,台架未建模动态和外部干扰真实存在,均会导致控制效果恶化。因此须将定理1扩展,保证闭环控制系统在外部干扰下稳定。
定理2:假设控制参数已知。当满足以下条件时,式(15)闭环系统状态方程式在给定的干扰衰减度γ下具有H∞鲁棒随机稳定性,其中γ为给定常数:存在对称正定矩阵P=PT>0,满足:
其中
证明:通过对式(28)不等式左乘和右乘矩阵,将其等价转化为
其中
对式(29)不等式应用Schur补定理,可得


在定理1李雅普诺夫函数的基础上,考虑有界2范数干扰qk,构造函数J:其中 ΔV(ξk,k)的展开式见式(32)。同时,由式(15)可得式(33),将式(32)和式(33)代入式(31)得式(34)。
根据式(30)可以推算出式(34)的 J≤0。对 k时刻将式(31)每一项逐一相加得

因 V(ξ0,0)=0,V(ξ∞,∞)≥0,故

由此可证明在给定的干扰衰减度γ下式(15)闭环系统状态方程式具有H∞鲁棒随机稳定性。
在假设控制器增益给定的情况下,式(15)闭环控制系统的随机稳定性及H∞鲁棒性能可由定理1和定理2保证。进一步地,可通过求解如下非线性优化问题得到控制器的参数。
控制器设计:对于给定的干扰衰减度 γ,式(17)中最优跟踪控制参数可通过求解以下问题得到:

约束条件为式(26)不等式和式(38)不等式。

式(37)中 Trace(·)表示矩阵的迹函数。式(37)所描述的问题为非线性优化问题,难以直接求解。因此,在某一固定点(P0,Q0)附近,矩阵PQ的迹可近似为

采用以下步骤对非线性优化问题进行求解。
第1步:寻找一组满足优化问题的可行解(P0,Q0)。
第 2步:令 Vk=Pk,Wk=Qk,求解下式得到(Pk+1,Qk+1),约束条件为式(28)不等式和式(38)不等式。

第 3步:当|Trace(Pk+1Qk+1)-Trace(PkQk)|<ε时,停止迭代,否则,令k=k+1,并转至第2步继续迭代计算。
求解式(37)的非线性优化问题,得到系统控制增益 Kκi,这些参数与网络延时数值和概率有关。
3 仿真研究
以电动汽车防抱死制动过程为例,验证本文提出的测功机加载控制算法的有效性。
3.1 测试对象
文献[33]中设计了基于PID的防抱死制动控制,见图2。防抱死制动触发后,估计路面附着参数以确立当前路面所能提供的最大制动力;电制动系统在滑移率PID闭环控制下提供制动转矩,动态调节车轮滑移率稳定于参考值;电机不足以提供足够制动力时,液压制动系统辅助提供稳态制动转矩。
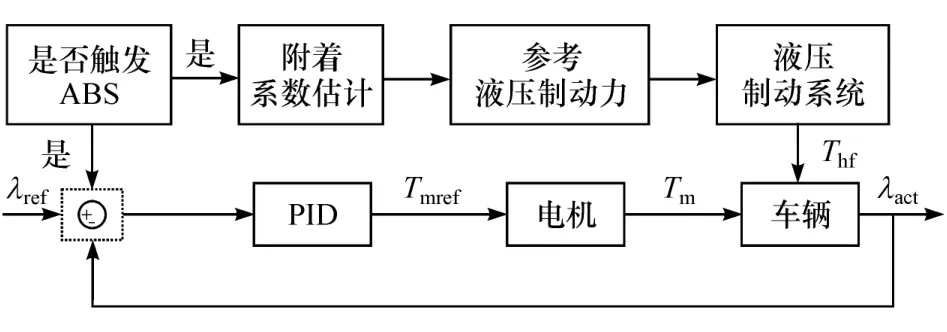
图2 防抱死制动控制
防抱死制动控制涉及整车安全性,为充分印证滑移率控制算法台架测试的有效性,负载模拟算法应精确模拟不同道路条件下防抱死控制过程的动态机械负载,特别是防抱死控制性能差、滑移率动态波动的情况。
3.2 评价指标
为评价防抱死制动过程不同方法下测功机网络控制系统的负载模拟性能,采用滑移率模拟误差平方和作为量化评价指标,即
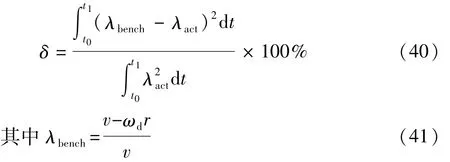
式中:λact为车辆纵向动力学模型计算的前轮滑移率模拟参考值(图2);λbench为台架模拟的实际滑移率。
3.3 仿真结果
仿真过程车辆和台架关键参数见表1。与传统PI控制进行对比,控制参数采用文献[34]中的方法整定,PI速度控制环带宽取50 rad/s;采样时间Ts=10 ms。以低附着路面为例进行防抱死制动过程台架负载模拟的仿真,结果见图3。
低附路面(附着系数0.2),车辆制动初速度为60 km/h。制动初始瞬间,踩制动踏板并保持主缸压力稳定于3 MPa,触发防抱死制动控制。液压制动系统提供稳态制动转矩,电机动态调节车轮滑移率。由图3(a)可见,当车轮滑移率控制性能较差时,车轮转速出现动态波动,滑移率在稳态值附近振荡。
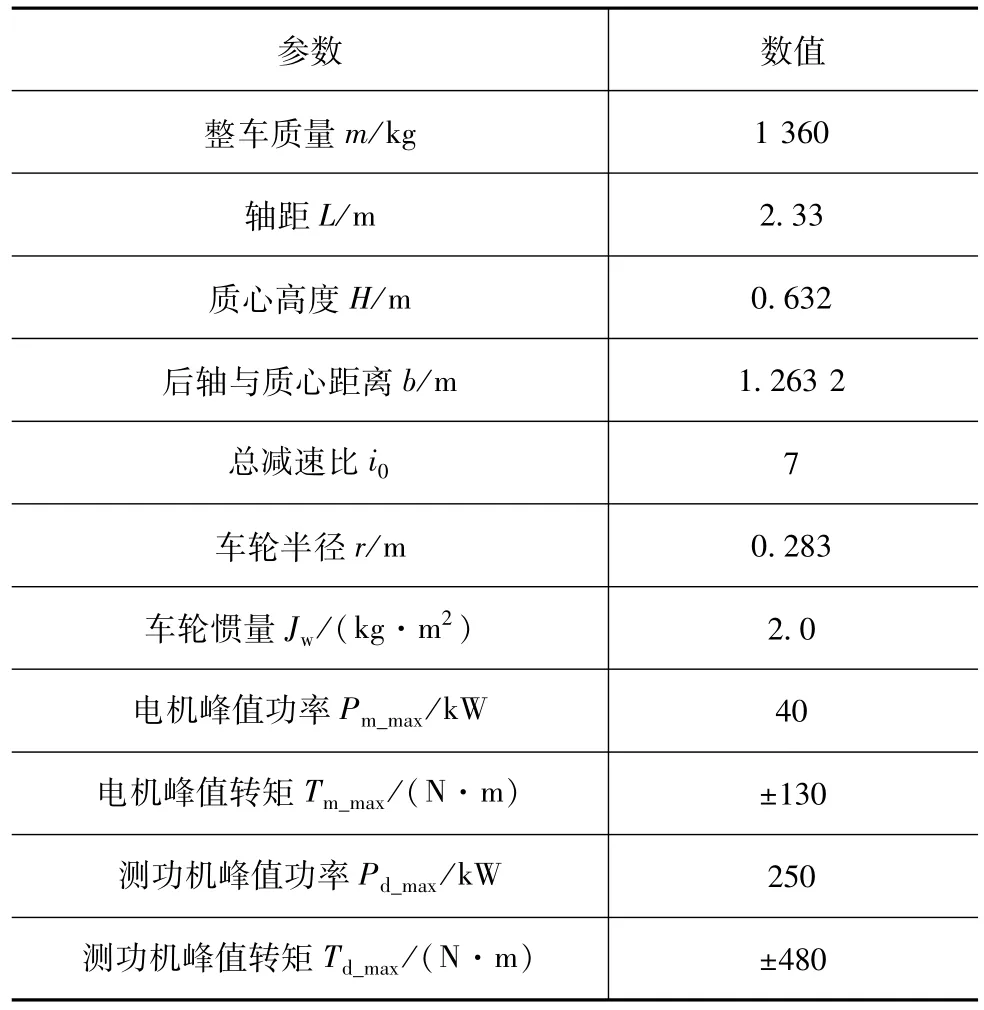
表1 车辆和台架关键参数
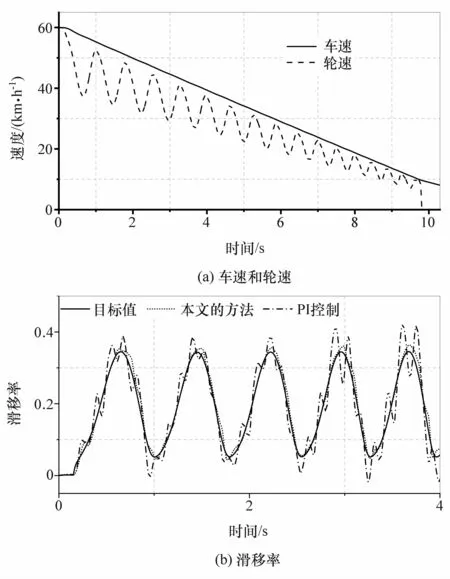
图3 防抱死制动过程负载模拟效果
为便于分析,取防抱死制动过程0~4 s时间段车轮滑移率和不同加载控制方法下台架模拟滑移率,如图3(b)所示。由图可见,控制网络中存在的随机网络延时较大程度恶化了控制器性能,致使传统PI控制下台架模拟滑移率数值沿目标值呈现无规则的动态持续波动,无法稳定跟踪目标滑移率,负载模拟误差较大;相比而言,本文提出的方法可以有效抑制网络传输时滞带来的负面影响,台架模拟滑移率数值稳定跟踪目标值,负载模拟误差大幅减小。取防抱死制动过程起止时间0.2~10 s,根据式(40)计算滑移率误差平方和δ,如表2所示。传统PI控制下,δ=14.5%;本文提出的方法下,δ=3%;负载模拟量化误差比传统PI控制减小79.3%。

表2 滑移率误差平方和
4 结论
主要讨论测功机网络控制系统负载模拟算法设计问题。建立了车辆与台架耦合动力学模型和随机网络诱导延时模型;为进一步改善系统负载模拟性能,提出了基于预测控制结构的测功机网络控制系统延时补偿算法;通过构建增广系统,将随机系统跟踪控制问题转化为鲁棒镇定问题,并分析H∞性能,通过求解非线性优化问题得到系统控制增益。进行了防抱死制动过程台架测试的仿真,结果表明:与传统PI控制相比,本文提出的补偿随机网络时滞的测功机加载控制方法可有效抑制网络延时的影响,测功机控制系统更稳定,鲁棒性更强;滑移率模拟误差平方和降低79.3%,负载模拟误差大幅减小,从而确保台架测试的真实有效。
