基于激光跟踪仪的火箭橇基准线测量技术研究
2020-05-26张岩龙狄长春李建中吴大林
张岩龙 狄长春 李建中 吴大林


摘 要 火箭橇轨道基准线是轨道精测和调整的依据,对保证轨道高平直度至关重要。针对现有的基准线测量标校方法存在需要设备多、测量周期长、数据处理复杂等问题,研究基于激光跟踪仪转站原理的测量标校技术,能够解决现有方法的不足。试验结果表明,该方法的测量精度满足火箭橇基准线的标校要求,操作简单,提高了基准线测量标校的效率。
关键词 火箭橇;激光跟踪仪;基准线;测量
引言
火箭橇是20世纪中后期发展起来的一种大型、高精度地面动态模拟试验设备,主要用于解决航空、航天、武器装备及民用高新技术产品在高速度、大过载运行过程中所遇到的一系列性能参数测试难题[1-2]。火箭橇轨道的基准线是轨道测量和调整的依据,是保证火箭橇轨道高直线度的最重要基础,要求其相对直线度高于1×10-6的空间直线[3]。国内的火箭橇轨道基准线是由间隔60米的一系列基准桩构建空间直线。由于基准桩测量和建设误差,实际的基准线为一条空间折线(如图1所示)。其实际直线度远低于指标,为了保证其直线度,中科院武汉某研究所采用高精度GPS、高精度水准仪和高精度全站仪联测的方法对基准桩测量,并进行拟合评差对每个基准桩进行修正,提高基准线的直线度以满足轨道测量要求。中铁大桥勘测设计院的李书银[4]等采用GPS和电子水准仪对湖北襄阳某火箭橇轨道基准线进行标校。该标校方法测量过程复杂,使用仪器多,测量周期长,国内能承担标校任务的单位少,且单次测量费用高。激光跟踪仪作为大空间高精度测量仪器,通过转站可实现更大空间的测量。屈亚伟将该技术应用于飞机位姿测量中[5],林嘉睿将该技术应用于超大型工件研究[6],这些研究成果表明激光跟踪仪可用于精确测量大尺寸工作,也为火箭橇基准线标校提供了技术支撑。
1基于激光跟踪仪的基准线测量原理
激光跟踪仪作为大空间三维坐标测量仪器,其一次布站测量半径可达到160m,基准桩测量是要将相距1500m的28个点纳入同一个坐标系中,仪器一次架设无法实现所有点测量。为了实现对复杂大型物体的测量,采用转站方式,利用3~6个空间固定点,实现仪器的多站位测量[6-8],转站原理如图2所示。
仪器在初始位置建立坐标系{A},对转站点进行逐一测量,获取一组点组合P。然后将仪器移动到新的位置,重新初始化,建立新的坐标系{B},再依次测量转站点,获取另一组点组合Q。虽然P和Q两组是对同一组点的测量,但其坐标值没有任何关系,因为他们是在不同坐标系中获取的,坐标系{A}的原点与坐标系{B}的原点不重合,坐标系{A}的方位与坐标系{B}的方位也不重合。
激光跟踪仪转站过程就是根据组合P和组合Q两组点坐标的数值关系,采用公式(1)[9]求解将坐标系B转换到初始坐标系A的旋转向量R和平移向量T,实现将坐标系B平移旋转与坐标系A重合,实现坐标系的统一。这时组合Q与组合P的坐标值就会非常接近,误差非常小,其误差与布设距离相关,与仪器的测量精度接近。实现了仪器的移动,仪器在新的位置测量的结果就与初始位置是一样的。只要在仪器周围有满足转站要求的固定点,这样的转站过程可连续进行,实现了将初始坐标系{A}一直扩大到需要的空间。
式中:θ、γ、φ分别为坐标系B相对于坐标系A的俯仰角、滚转角和偏航角。
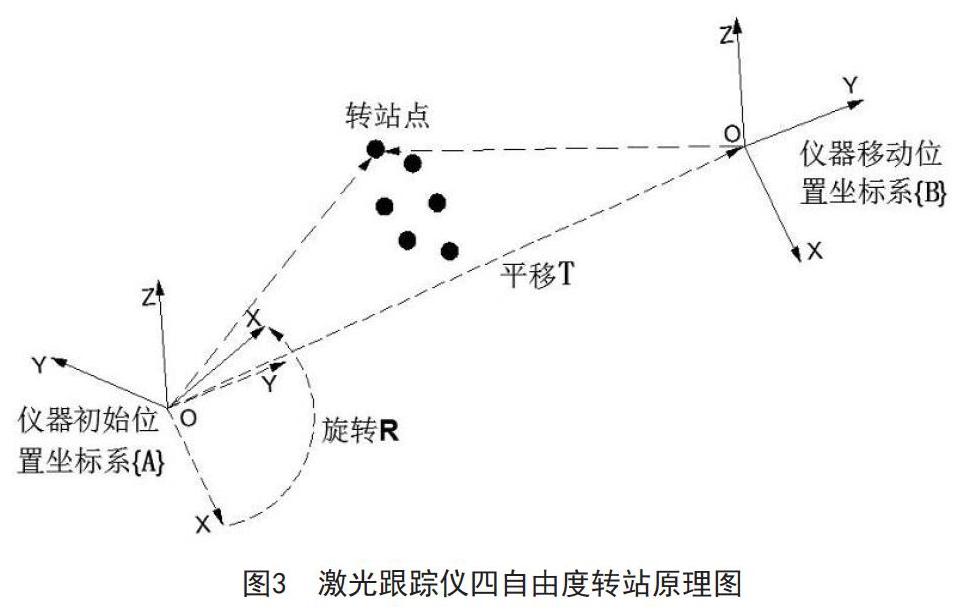
以上转站过程中,坐标系的平移矩阵T包括X、Y、Z三个自由度,旋转矩阵R包括RX、RY、RZ三个自由度,而在基準桩测量中,为了保证高程不受影响,还可应用四自由度转站[10],其原理如图3所示。
跟踪仪不论在任何位置,经过初始化后,仪器是水平的,仪器坐标系的Z轴都是水平面的方向向量,在转站过程中,平移矩阵T的三个自由度都参与,而旋转矩阵R只有RZ参与,而RX、RY不参与旋转,保证基桩高程测量精度。
2基于激光跟踪仪的基准线测量方法
激光跟踪仪的测量精度与被测量物距仪器的距离成正比,采用所有测量目标的距离基本相等的,保持同精度测量,通过对现场地形和仪器测量要求分析,建立如图4的测量方案。
仪器架设于基准线西侧的道路,保证与相邻基准桩和转站基座的距离相等。步骤如下:
(1)先将跟踪仪架设于基桩1、2的中间,将转站基座按要求阵列置于基桩2的侧面,测量基桩1、2,再测量转站基座,保持基座不动;
(2)将仪器移动位置2,先按上次的顺序再次测量位置1的转站基座,对仪器进行最佳拟合转站操作,完成初始仪器坐标系的平移旋转,测量基桩3;
(3)将转站基座按相似的阵形移动位置2,测量所有基座;
(4)将仪器移动位置3,先测量位置2的转站基座,对仪器进行转站操作,测量基准桩4,再移动转站基座,这样滚动向前,完成所有基桩的测量。
在仪器直线转站测量方案中,激光跟踪仪在基桩的单侧沿直线移动,还有一种是激光跟踪仪在基桩的两侧沿折线移动,如图5所示。仪器可架设于基准线西侧的道路和东侧的轨道梁水槽内,仍需保证与相邻基准桩和转站基座的距离相等。
3试验验证与分析
为验证测量方法的正确性和精度,分别采用激光跟踪仪直线移动和折线移动两种方案对基准桩的直线度进行了测量。
3.1 六自由度直线转站
六自由度直线转站是指转站采用六自由度坐标系转换,激光跟踪仪直线移动的测量方案。此方案也是第一次测量的方案。结果如表1所示。坐标系建立方法:以J08为坐标原点,J08处的水平面为XOY平面,J08与J23连线为X轴。
从表中可得出,激光跟踪仪与计量单位测量的X向间距,最大差值为12mm,其次为5.4mm,其余的都较小。高程差的最大差值为46.7mm,并且从J01至J28,变化的趋势也不同,其变化如图6所示。电子水准仪测量的高程是J01最低,其余基桩都是不断升高,与基准线为空间直线的设计是一致的,而激光跟踪仪测量的高程是从J01开始,先升高,后降低,与基准线的设计不一致。
为此对相邻基桩高程差进行复测,其结果与计量单位最近测量结果大部分值相近,变化趋势也一致,变化较大的是两端基桩高程,这说明绝大部分基准桩的高程并没有发生较大变化。而六自由度直线转站测量的高程值相差较大,变化趋势也不一致,说明此方法精度有待提高。
基桩测量重点需要得到其高程差值和横向差值,而六自由度转站中如果绕三个轴旋转,其初始站的水平面会发生变化,得到的Z向坐标就不是严格意义的高程值了,因此考虑只允许绕Z轴旋转,而禁止其他两个轴旋转,即四自由度直线转站方案。
3.2 四自由度直线转站方案
采用该方案测量得到基准桩坐标如表2所示。坐标系建立方法:以J07为坐标原点,J07处的水平面为XOY平面,J07与J22连线为X轴。
从表中可得出,对于高程,四自由度直线转站测量结果与激光跟踪仪测量结果一致性较好,与电子水准仪测量值大部分比较接近,变化趋势也一致,只有两端的相差较大。X向间距,最大差值约为12.6mm,其次为5.2mm,其余的都较小,大部分小于2mm。从以上对比可得出,四自由度直线转站法对X向和Z向坐标测量是准确的。对于Y向坐标,由于两种测量方法及坐标系建立方式的不同,Y向间距没有可比性,为此我们通过多次测量的数据重复性去验证。表3是应用四自由度直线转站法进行两次测量的结果。
从表中可得出,X向和Z向数据重复性较好,X向最大差值仅为1.34mm,78%的差值都小于1mm。Z向最大差值为1.05mm,其余都小于1mm。而Y向差值最大为12.65mm,大于10mm的占36%。
根据李书银等人撰写的论文[4]用GPS和全站仪复测的基准桩平面坐标,X向最大为1.7mm,Y向最大为4.7mm,而跟踪仪复测的Y向差值比较大,需要对测量方案进行改进,减小Y向的差值。
由于轨道基准线的测量是比较困难的,特别是由于场地的限制,仪器的布站条件很有限,X向变化很大,Y向变化很小,转站过程中测量误差、计算模型误差等分配给两个方向造成的效果差别很大,建立在有限的空间内,加大Y向的变化量,仪器在转站过程中沿折线移动,即四自由度折线转站方案。
3.3 四自由度折线转站方案
在现场对J01~J09号桩进行了测量,其结果如表4所示。
从上表可得出,四自由度折线转站两次测量值,X向最大差值为5.52mm,Y向最大差值为3.93mm,Z向最大差值为0.79mm。
为了与四自由度直线转站方案对比,将两次全程测量结果的前9个基准桩数据形成表5。
从上表可得出,四自由度直线转站的两次测量值,X向最大差值为0.84mm,Y向最大差值为6.31mm,Z向最大差值为0.81mm。比较可得出,折线转站方案降低了Y向的差值,Z向差值基本不变,但X向差值增大较多。由于X向坐标不参与基准线修正,这也是我们需要的。增加仪器相对基准线的横向设站距离可减小Y向差值,而X向差值有增大的趋势,其原因是仪器测量差值是定值,当Z向方向确定后,X向和Y向按一定的比例分配测量誤差,误差与仪器相邻测点的距离成反比。从四自由度折线转站的测量结果来看,增大仪器Y向测量距离对减小Y向误差有益的,这也为下一步工作提供了思路。
4结束语
针对火箭橇基准线测量难度大、操作烦琐等问题,研究设计了基于激光跟踪仪的测量原理与方法,试验结果表明该方法用于测量基准线具有操作简便、测量精度高、作业量小、数据处理快等特点。但由于场地条件限制,横向误差相对较大,建议下一步继续研究减少横向测量误差的方案。
参考文献
[1] 杨兴邦.XB高精度火箭滑橇实验滑轨[J].中国工程科学,2002, (10):98-104.
[2] 杨兴邦.火箭橇试验滑轨[J].航空精密制造技术,1992,(1):1-3.
[3] 杨兴邦.XB火箭橇试验滑轨的直线度评估[J]. 航空精密制造技术,1999,(5):25-26.
[4] 李书银,吴迪军,李世良. 火箭橇滑轨基准线精密工程测量[J]. 武汉工程职业技术学院学报,2007,(2):16-18.
[5] 屈亚伟. 基于激光跟踪仪的飞机位姿测量方法研究[D]. 哈尔滨:哈尔滨工业大学,2015.
[6] 林嘉睿. 大型复杂物体组合测量方法研究[D].天津:天津大学精密仪器与光电子工程学院,2012.
[7] 佚名.徕卡测量系统[ED/OL].https://baike.baidu.com/item/%E5%BE%95%E5%8D%A1%E6%B5%8B%E9%87%8F%E7%B3%BB%E7%BB%9F/307384?fr=aladdin ,2010.
[8] 佚名.Leaica AT401使用手册[M].海克斯康测量技术有限公司,2014:15-16.
[9] 金正琪. 提高激光跟踪仪转站测量精度的技术研究[D]. 杭州:浙江大学,2013.
[10] 李广云.LTD500激光跟踪测量系统原理及应用[J]. 测绘工程,2001,10(4):3-8.
作者简介
张岩龙(1982-),陕西子长人;学历:硕士研究生,工程师,现就职单位:32183部队,研究方向:武器试验鉴定工程研究。