一种新型潜浮式深海地震仪的设计与试验*
2020-05-25孟肯秦华伟朱心科侯斐
孟肯, 秦华伟, 朱心科, 侯斐
海洋地球物理学
一种新型潜浮式深海地震仪的设计与试验*
孟肯1, 2, 秦华伟1, 朱心科2, 侯斐2
1. 杭州电子科技大学机械工程学院, 浙江 杭州 310018; 2. 自然资源部第二海洋研究所, 海底科学重点实验室, 浙江 杭州 310012
鉴于国内外海洋地震台网的缺乏, 本文介绍了一种面向全球海域应用的漂浮式海底地震接收系统(mobile earthquake recording in marine areas by independent divers, MERMAID)。针对潜浮式地震仪MERMAID浮标的研发过程, 建立了浮标的总体设计要求与典型工作循环流程, 设计了液压式浮力调节系统、机械结构等, 并对比分析了不同转速及负浮力下潜过程, 最后进行了实验室压力检测和千岛湖湖试。试验结果表明, 该浮标能在15MPa压力下保持良好的密封性与稳定性, 利用水听器可以有效地采集到天然地震纵波(P波), 同时计算各模块单个周期的能耗, 以验证设计指标。
地震台网; 潜浮式地震仪; MERMAID浮标; 浮力调节; 天然地震
海洋地震观测是传统的海底声学技术, 也是研究海底构造与海洋岩石圈深部结构的主力技术。发展海洋地震观测可以较为准确地获取海洋的介质参数、温度分布等, 也有利于完善我国海洋天然气水合物及油气资源勘探技术(牛滨华等, 2000)。
在海洋地区进行高质量的长期地震采集是全球地震观测的重要组成部分, 而建立海洋地震观测站对认识地震本身和地球结构有着重要意义(周公威等, 2014)。目前, 使用较多的海底地震仪OBS(ocean bottom seismometer)是将检波器放在海底的地震观测设备, 既能用于天然地震(被动源)观测, 又可用于海上人工地震(主动源)勘探(Jocobson et al, 1991; 刘建华等, 2008)。在勘探中, 通过工作船将被动源OBS投放到地震频发区, 保证其与海底有良好的接触, 进行长期连续地记录天然地震信号, 在一定周期后由母船回收(刘训矩等, 2019; 汪俊等, 2019), 将数据导出后完成对天然地震的采集。国产宽频带7通道(I7-C)OBS, 包括3通道宽带地震计(60s- 50Hz)、3通道检波器(2~150Hz)、1通道水听计, 采用单舱球结构, 其功耗为0.25W, 同时具备接收高频人工震源信号和天然地震的能力, 最大连续工作时长为120d(郝天珧等, 2011)。
通过比较分析, OBS布放与回收成本较高, 不能将数据实时传输, 且需要定期检查和维修。区别于传统陆地上探测台站和坐底式OBS, 地海洋学实时观测阵浮标(Array for Real-time Geostrophic Oceanography, Argo)是一种沉浮式海洋观测平台, 主要用于海洋次表层温度、盐度、深剖面测量, 通过天线与卫星进行数据传输, 仪器布放运行两年后电源耗尽(Gould, 2005; 葛锡云等, 2018)。利用Argo自主沉浮的特点, 可以组成漂浮式海底地震接收系统(mobile earthquake recording in marine areas by independent divers, MERMAID)。该仪器能够高覆盖、多循环记录地震波的信息, 其研发和应用属于海洋地震领域的前沿技术。2016年, 普林斯顿大学研制Son-O-MERMAID水下地震站在加拉帕戈斯成功进行了测试, 其中有18个在塔希提岛附近记录到天然地震波信号(张树良等, 2016;Bigot-Cormier et al, 2017)。
为了加强对海洋区域高质量地震观测网络的建设, 进一步获取地震波的相关数据, 本文依据国外产品的设计理念, 主要介绍了自主研发的MERMAID系统结构、运行原理、循环过程等, 并通过理论分析其关键技术, 由试验结果进行验证、优化。
1 MERMAID浮标总体设计
1.1 设计指标
深海1500m左右的温度、盐度和密度几乎处于均匀状态, 是观测天然地震P波的理想层面。球形MERMAID浮标(图1)是长时间悬停在某一深度范围的海洋剖面装置, 采用水听器“监听”信号, 能够实现0~1200m深度范围内的悬停、周期性自主升沉, 在水面进行GPS定位及卫星数据传输等, 其横向随洋流运动。该浮标详细设计指标见表1。
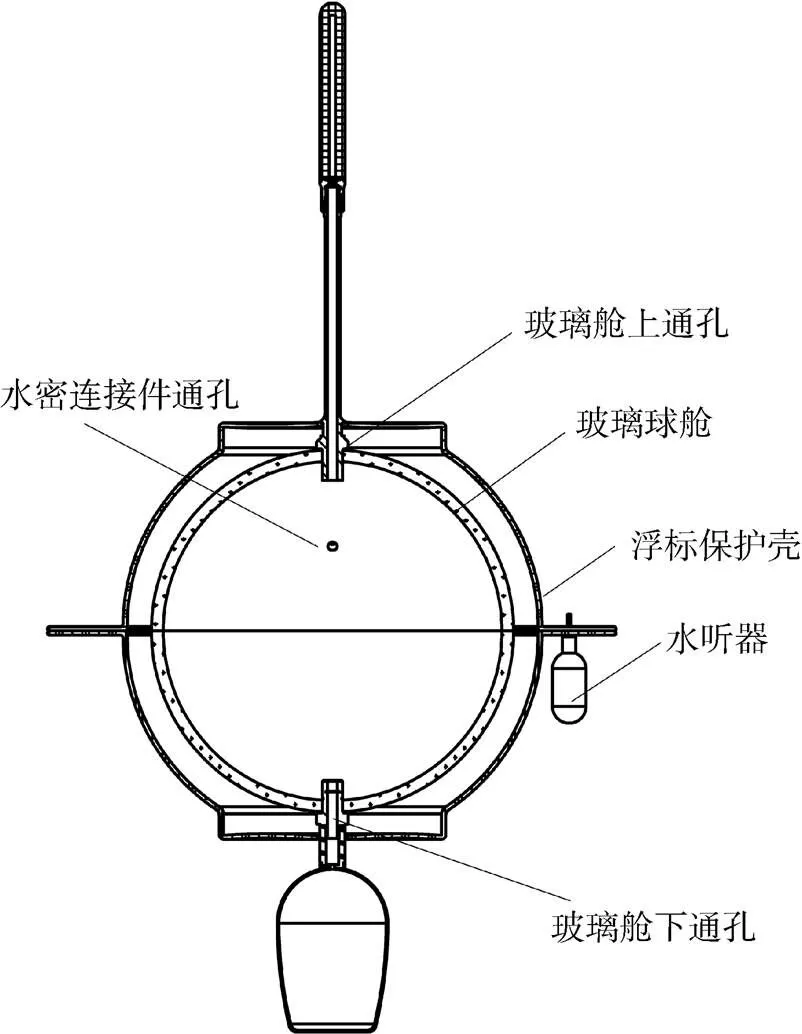
图1 MERMAID浮标外形结构
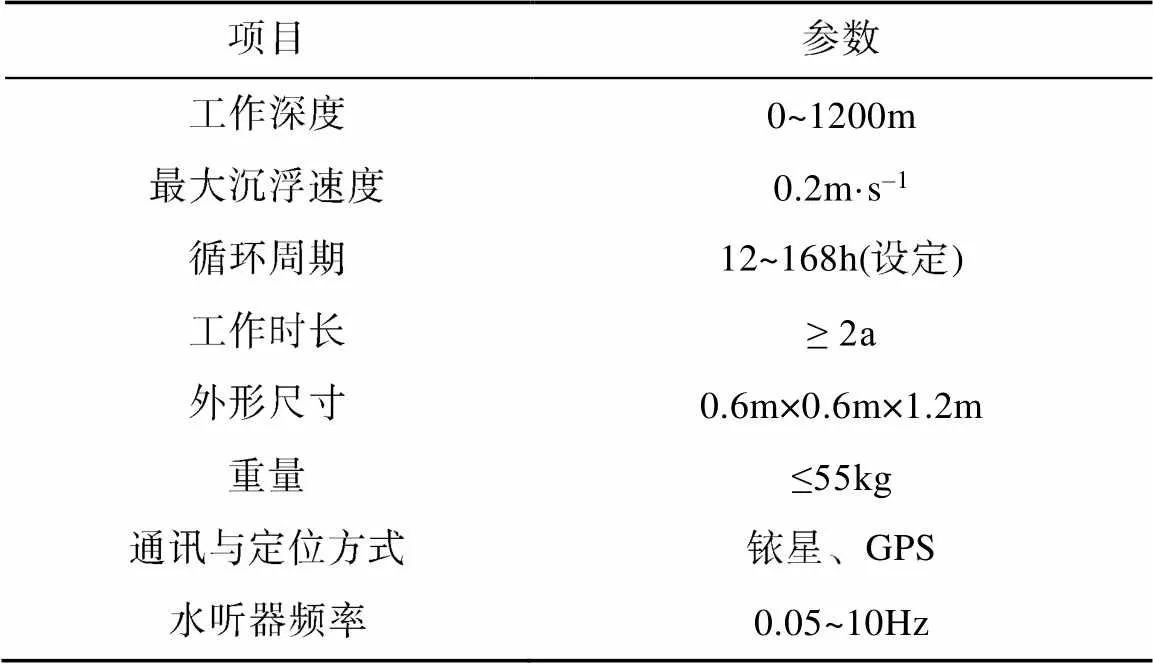
表1 MERMAID浮标设计的基本指标
1.2 浮力调节原理
由浮标在静水中的受力, 式(1):
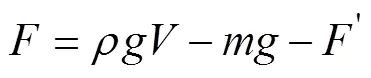
其中为海水密度;为重力加速度;为排开液体的体积;为浮标总质量;′为人为施加外力。
通常, 实现装置水下自主浮力调节有两种方法(余立中等, 2001; 沈锐等, 2019): 1)保持装置的排水体积不变, 通过改变其质量大小以调节浮力; 2)保持装置的质量一定, 通过改变其自身的排水体积以调节浮力。后者是一种较为节能的方式, 故采用液压驱动来改变其排水体积以调节重力与浮力的平衡, 实现剖面浮标的上浮和下潜。
根据设计要求, 浮标在1200m深度的压强为12MPa, 取安全系数=1.3, 浮力调节系统最大运行压力取15MPa。现有的滚珠丝杠结构是利用减速电机驱动液压缸内滚珠丝杆螺旋转动, 来调节油囊的体积(丁巍伟等, 2019), 存在浮力调节量小, 重心不稳定的缺点。本文设计油泵式浮力调节原理如图2。
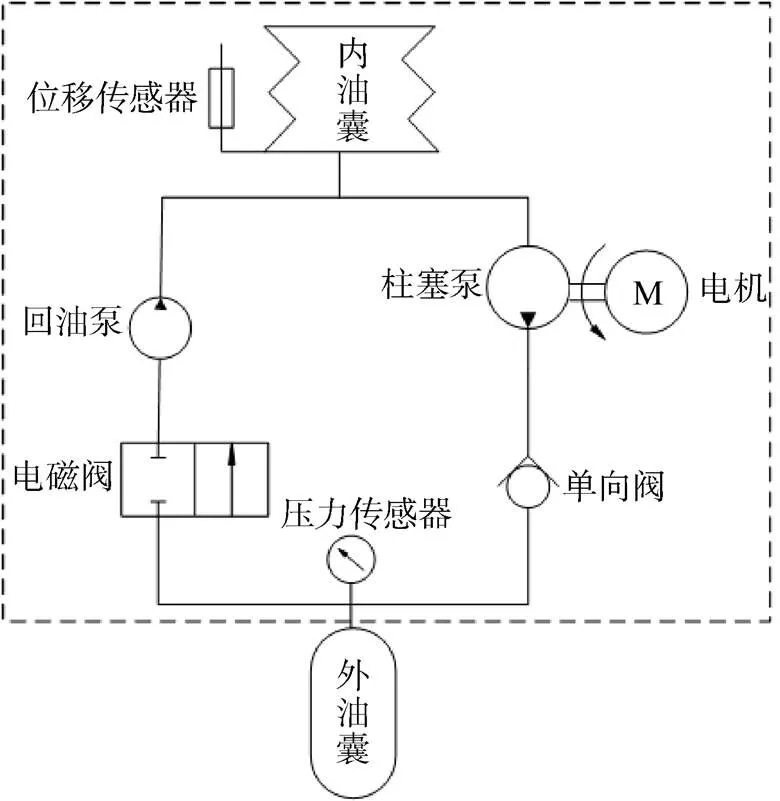
图2 浮力调节系统原理
液压系统结构要求简单, 且在满足条件的情况下使用低功耗的元器件, 保持重力一定, 通过对可变形的密闭容腔排油或者回油以增加或减少自身的浮力。动力结构由直流电机与齿轮减速箱组成, 以提高输出转矩, 并通过高压柱塞泵实现对浮力的精确调节(王世明等, 2010; 宗正等, 2018)。液压回路内部排出空气后, 基本的运行方式为如下。
1) 回油过程: 当电磁阀通电打开后, 回油泵启动, 从外油囊中回油至密闭的可伸缩内油囊容腔中。外油囊体积减小, 内油囊体积增大, 实现整体结构浮力减小。
2) 排油过程: 当电磁阀处于常闭状态时, 柱塞泵在电机的带动下正转, 从内油囊中通过单向阀排油至密闭的外油囊容腔中。外油囊体积增大, 内油囊体积减小, 实现整体结构浮力增加。
1.3 典型循环过程
MERMAID浮标按照预定程序进行自动沉浮, 一个典型周期的循环过程(图3)分为以下6个阶段。
1) 水面漂浮阶段: 上位机与浮标通讯, 完成程序自检, 在水面待命。
2) 下潜过程: 关闭水听器, 开启回油泵, 在低压条件下迅速回油, 浮标为变加速运动; 回油结束后, 在负浮力状态近似匀速下潜, 由液压管路中的压力传感器采集系统外部压强, 反馈当前深度信号; 到达预定深度后, 开启排油泵往外油囊微量多次排油, 调节重力等于浮力时, 当判断压力传感器数值基本不变时设定浮标处于中性浮力状态; 在误差允许的范围内(±50m)悬停在当前深度, 记录压力值, 为下一次循环提供定深和微调参数, 进入地震观测状态。
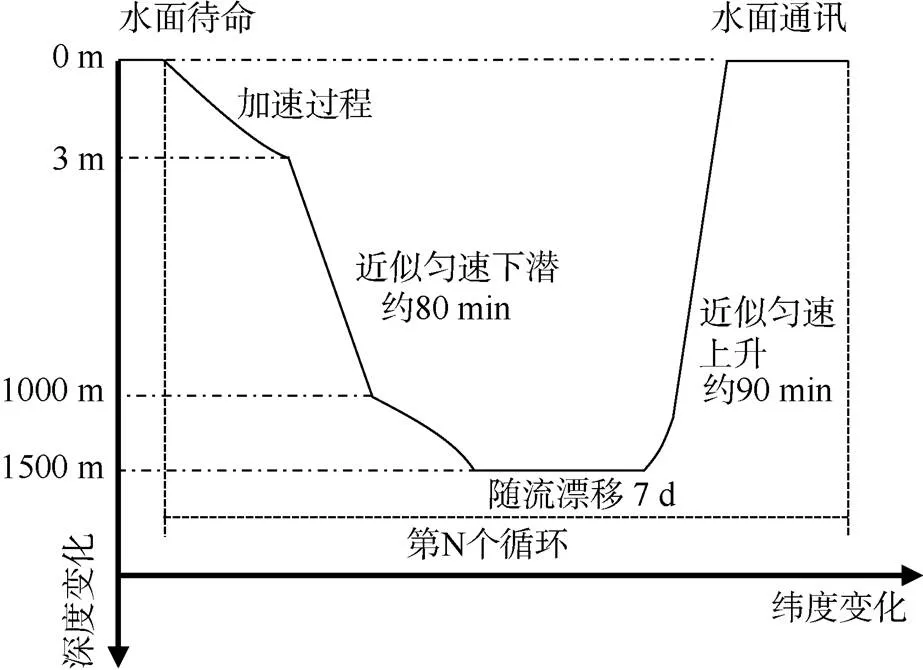
图3 浮标典型循环过程
3) 地震观测阶段: 开启水听器, 对水声信号连续采集。若检测到波形幅值超过设定阈值, 表示有大地震发生, 浮标延时3min上浮; 若无大地震发生, 浮标在悬停深度随洋流漂移7d后自动上浮。
4) 上浮过程: 关闭水听器, 柱塞泵启动排油, 装置在正浮力状态下近似匀速上浮, 设定到达水面的判断标志, 进入水面通讯阶段。
5) 水面通讯阶段: 主动与监控中心联系, 单片机截取地震波最大值前后共6min关键数据, 通过铱星天线将数据及定位信息等发送至地面接收站。受洋流影响, 水面定位与地震采样坐标存在一定误差。
6) 循环剖面: 等待命令, 校准时钟, 进入下一个循环。
2 结构布局及优化
2.1 稳心高
为了使浮标在恶劣海况中能够迅速恢复至初始平衡位置, 需要对球形玻璃舱内的系统结构装配进行布局。

重心位置为:

同时列出各部分元器件的浮容积, 并标出分布在三个坐标轴上的坐标值。则固定浮容积为:

浮心位置为:

根据浮标的水下稳心高的要求, 应满足:

为了保持平衡, 通过配平实验应有:
并要求满足:
2.2 空间布局
MERMAID浮标进行结构化装配, 球形仪器舱上、下、侧面分别留有通孔和抽真空密封件, 确保装置在水下1500m的密封和安全(商红梅等, 2016), 并对元器件按照功能分舱安装, 使其满足稳心高要求, 具体分舱如下(图4)。
1) 液压舱: 波纹式可伸缩的内油囊有利于标定回、排油位置, 通过位移传感器估算当前系统浮力状态; 控制板调节电机带动柱塞泵改变排水体积; 可变形的外油囊由标准密封O圈固定浮球外底部。
2) 电池舱: 按尺寸要求定制的一次性且能量密度高锂锰电池包单体组装成电池舱, 固定于液压舱上部, 能最大限度增加电池尺寸和容量, 使得重心坐标位于中线以下。电池组设计指标见表2。
3) 控制舱: 固定主控制板、铱星、无线电等元器件, 与液压舱、电池舱之间采用标准化接口连接。天线固定在浮球外部最上端, 能够保证通讯质量。甚低频、低功耗、高灵敏度水听器作为系统信号采集装置固定在浮球保护壳, 另一端通过水密连接件与内部控制板连接。同时预留其他传感器接口。
图4 MERMAID浮标结构布局
表2 电池组技术指标
2.3 结构优化设计
2.3.1 电位计
为了获得较为准确的排油信息, 需要预估油囊中的油量以及运行位置。实验中发现, 在油路中安装微型齿轮流量计后, 需要消耗一部分电量。容易产生累计误差, 并且增加了管道中的阻力。
优化后, 通过在内油囊一侧增加位移传感器, 密封端盖顶部设计传感器滑块固定架, 使内油囊在伸缩的过程中有效地获取排油位置, 提高对浮力调节的控制(图5)。
2.3.2 限位开关
为了防止电机过量排油或者回油, 在内油囊伸缩的上、下极限位置分别安装限位开关, 与电路串联。试验中发现, 利用内油囊密封端盖上顶或者下压开关, 接触开关使电路断电。容易出现开关的疲劳和损坏, 对电机有一定的损害。
优化后, 通过软件读取位移传感器的值, 设定内油囊伸缩到限位开关前的2%~3%, 单片机控制电机停止运行。经过反复测试, 此方式能够有效地限制内油囊伸缩的极限位置并减少微动开关的疲劳使用(图5)。
2.3.3 电磁开关
一般仪器在密封和抽真空后不会轻易开舱, 连接电源后将一直为系统供电, 因此在设备运输或者存放时会损耗电量, 降低了使用年限。
优化后, 通过在玻璃壁内侧固定与电池串联的电磁开关, 由磁铁作为开关电源的“钥匙”, 浮标在装配、调试完成后断电密封, 在投放之前上电能最大程度节约电量的损耗(图5)。

图5 改进之后的控制舱
3 关键技术的计算与校核
3.1 运行参数
3.1.1 阻力系数
根据11月27日千岛湖试验结果, 测得浮球最大下沉速度为max=0.2m·s–1。则雷诺数

其中0为浮标的初始排水体积;为千岛湖水密度, 取1018kg·m–3;为运行速度, 单位m·s–1;为圆球直径, 取450mm;为浮标的横截面积;为15℃淡水粘性系数, 取1.1404×10–3Pa·s。对应圆球绕流阻力曲线(吴庆凯等, 2015; 邹一麟等, 2018), 得到该速度下的阻力系数C=0.4。
3.1.2 净浮力计算
浮标在质量一定的情况下, 由深度引起的浮力变化需要通过自身的浮力调节能力来平衡, 从水面到最大深度的体积变化量为:
3.1.3 下潜过程分析
对速度表达式进行积分可得下沉深度的表达式(13):

结合试验数据, 分别以90%负浮力和70%负浮力回油后下沉, 得到两组试验曲线, 其变化规律与理论分析的趋势基本相同。浮标15s即可达到近似匀速阶段的0.17m·s–1, 如图6中, 深度水平线表示在湖底静置。
3.2 功耗控制
自弃式MERMAID浮标的电池容量有限, 系统主要搭载各种传感器等组成反馈回路, 每个循环过程的元器件功耗需要达到最经济。
3.2.1 调节模块
在液压调节模块中, 动力系统消耗的能量最大, 连续排油量为1000mL。已知齿轮箱的减速比为5.7: 1, 柱塞泵的排量为0.1m·s–1。图3中, 外油囊接头连接溢流阀模拟海底1200m的压强, 对比测量不同转速下的电机功耗大小, 见表3。
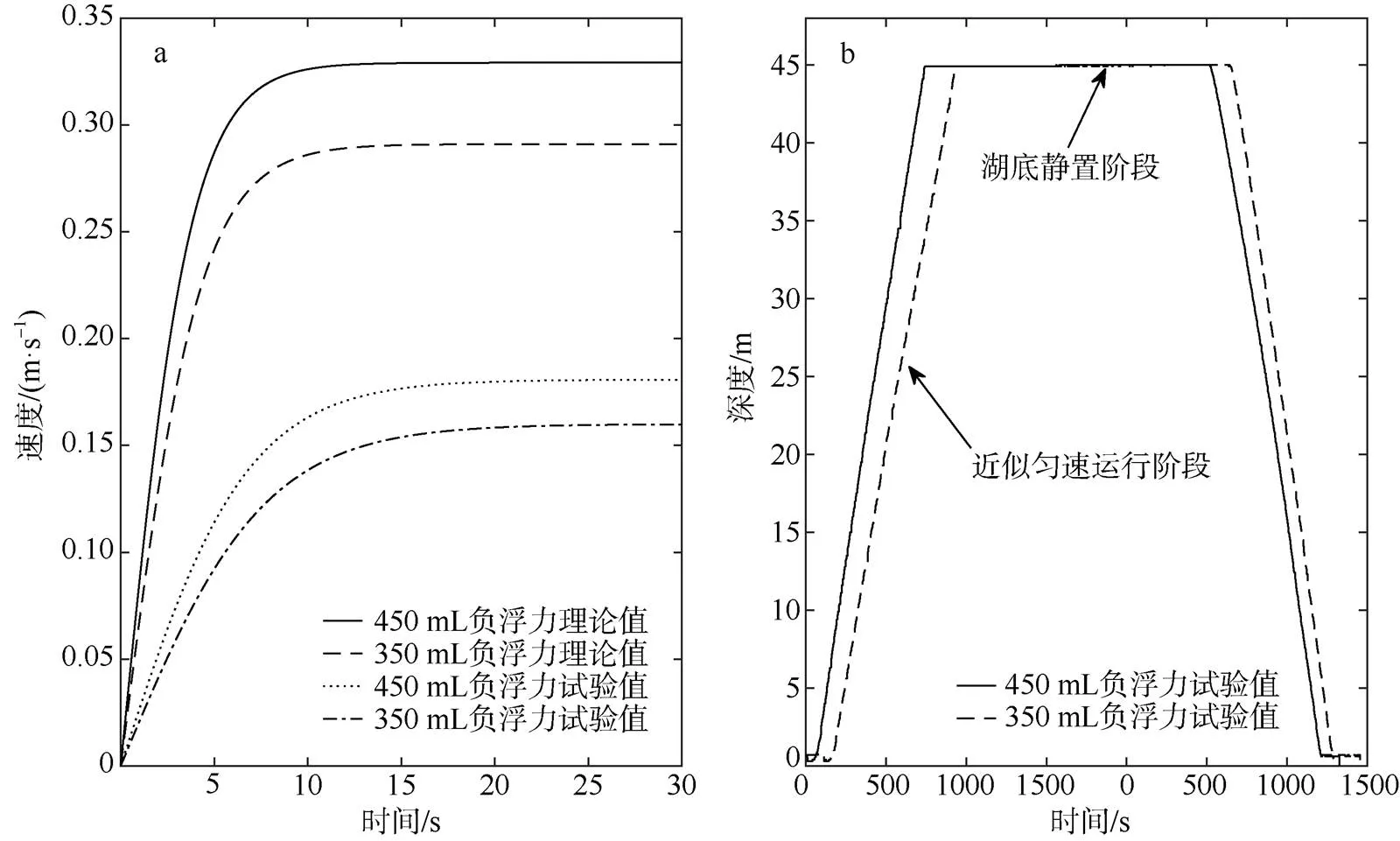
图6 理论分析(a)与湖试数据(b)
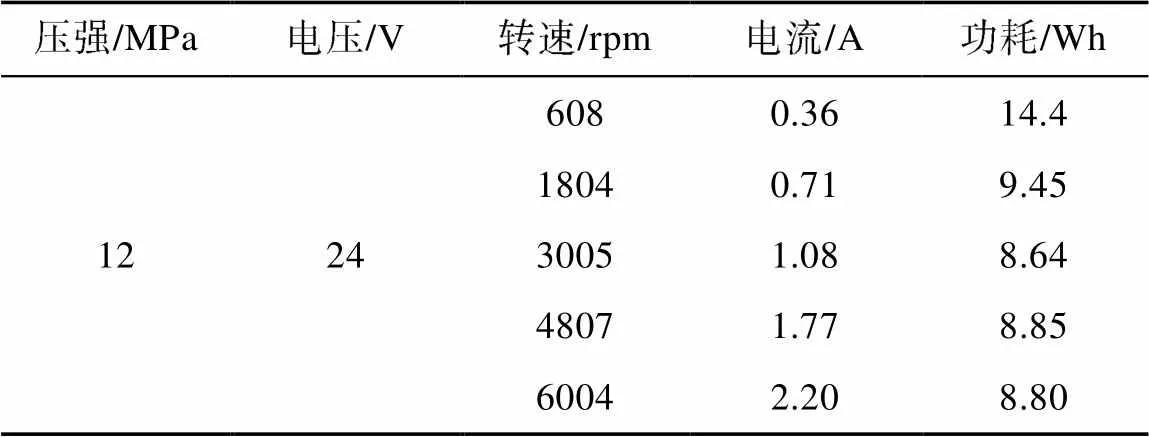
表3 电机不同转速对应的功耗
根据液压泵压力—流量曲线, 需要满足扭矩要求, 同时考虑排油10min即可达到最大上浮速度, 故选择电机理论转速6000rpm。
3.2.2 控制模块
主控制系统CPU采用STM32L475低功耗芯片, 水听器电压在0~9V, 功耗为10mW, 浮标在运行中关闭水听器, 在采样期间单片机休眠。浮标在未进入通讯状态时, 关闭卫星通讯及GPS定位模块。
3.2.3 通讯模块
铱星采用A3LA-RG模块, 连接抗水深2000m铱星GPS天线远距离通讯, 其性能参数见表4。无线电采用XTend射频(RF)模块进行调试通讯, 其使用方便、功耗低、节省PCB板空间。
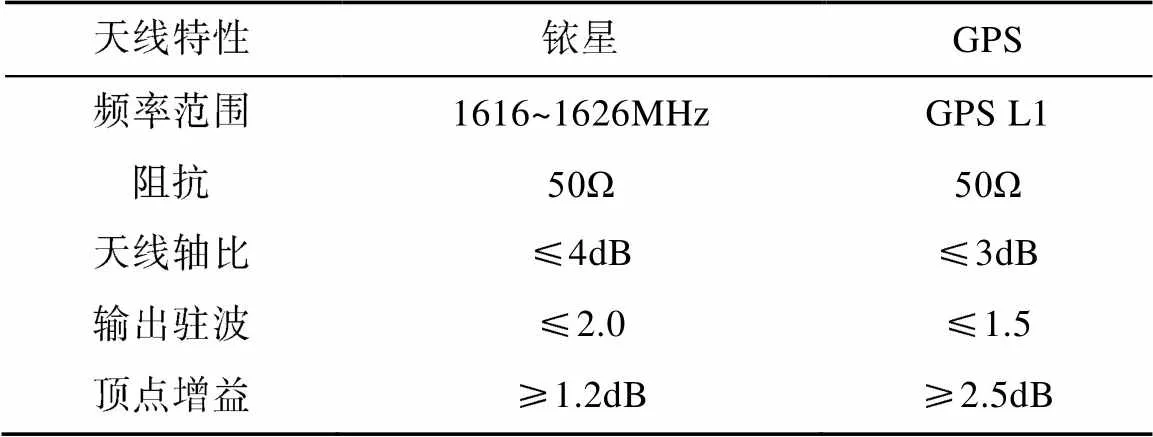
表4 天线性能要求
内置单片机对采样信息进行初步判断和过滤, 截取波峰前后信号, 以2.4kbps速度传输, 每条信息最长为256字节。
3.3 主控制单元
1) 下位机系统: 系统的下位机设计采用传感器、A/D转换器和单片机等硬件, 具有与上位机双向通讯的功能, 接受并响应上位机发送的信号采集、模式切换、数据处理等指令, 实现系统的可视化。
2) 上位机系统: 上位机由通讯协议实现对不同浮标进行编号, 设定调试模式与工作模式, 在监控中心的界面中能够实现设定下潜时间、工作周期和休眠周期等功能。在通讯阶段, 可以校准内部时钟、检测真空计读数、进行GPS授时等。数据接收完成后, 可以分析数据并绘制图形, 如图7。
4 试验与结论
目前, MERMAID浮标完成样机装配, 进行了压力测试和湖试。结果表明, 该浮标能够实现其预定的基本功能, 多种工作模式相互结合, 密封效果良好, 传感器数据采集效率高, 系统操作简单, 符合设计需求。其主要结论如下。

图7 上位机控制界面
1) 浮力调节系统能够在15Mpa的压力下稳定运行, 结构布局有效地提高了浮标的采样效率和空间利用率。
2) 调节电机转速为6000rpm能减少排油时间并有效控制液压模块功耗, 总耗电量4.19kWh小于电池容量4.8kWh, 能够满足设计使用年限(表5)。

表5 各模块耗电量统计
3) 浮标在淡水中的最大下沉约为0.2m·s–1, 回油结束后下沉3~4m深度可运行至近似匀速阶段, 与理论分析基本符合。
该浮标将在南海海试中进一步检测其性能。未来在浮标的液压结构上, 可增加高压回油支路, 以实现多层剖面的采集, 并通过程序优化控制装置中性浮力的精准悬停。将该浮标布放在广阔海域可以组成海底地震观测网, 开展层析成像, 实现多剖面、多功能、自动化、高效率的目标。
丁巍伟, 黄豪彩, 朱心科, 等, 2019. 一种新型潜标式海洋地震仪及在海洋地震探测中的应用[J]. 地球物理学进展, 34(1): 292–296. DING WEIWEI, HUANG HAOCAI, ZHU XINKE, et al, 2019. New mobile oceanic seismic recording system and its application in marine seismic exploration[J]. Progress in Geophysics, 34(1): 292–296 (in Chinese with English abstract).
葛锡云, 赵俊波, 陈南若, 等, 2018. 深海多功能浮标设计[J]. 船海工程, 47(3): 154–157, 163. GE XIYUN, ZHAO JUNBO, CHEN NANRUO, et al, 2018. Design of the deep-sea multi-purpose buoy[J]. Ship & Ocean Engineering, 47(3): 154–157, 163 (in Chinese with English abstract).
郝天珧, 游庆瑜, 2011. 国产海底地震仪研制现状及其在海底结构探测中的应用[J]. 地球物理学报, 54(12): 3352–3361. HAO TIANYAO, YOU QINGYU, 2011. Progress of homemade OBS and its application on ocean bottom structure survey[J]. Chinese Journal of Geophysics, 54(12): 3352–3361 (in Chinese with English abstract).
刘建华, 游庆瑜, 2008. 多功能海底地震仪(OBS)[J]. 中国科技成果, (5): 55.
刘训矩, 郑彦鹏, 刘洋廷, 等, 2019. 主动源OBS探测技术及应用进展[J]. 地球物理学进展, 34(4): 1644–1654. LIU XUNJU, ZHENG YANPENG, LIU YANGTING, et al, 2019. Active OBS exploration and its application progress[J]. Progress in Geophysics, 34(4): 1644–1654 (in Chinese with English abstract).
牛滨华, 孙春岩, 张中杰, 等, 2000. 海洋深部地震勘探技术[J]. 勘探技术与测试方法, 7(3): 274–281. NIU BINHUA, SUN CHUNYAN, ZHANG ZHONGJIE, et al, 2000. Seismic exploration in deep ocean[J]. Earth Science Frontiers, 7(3): 274–281 (in Chinese).
商红梅, 桑阳, 张永红, 2016. 基于国产第一代Argo浮标的结构优化设计[J]. 海洋技术学报, 35(6): 26–30. SHANG HONGMEI, SANG YANG, ZHANG YONGHONG, 2016. Structural optimized design for the first generation of domestic Argo floats[J]. Journal of Ocean Technology, 35(6): 26–30 (in Chinese with English abstract).
沈锐, 2019. HM2000型Argo浮标浮力调节机构测试平台设计[J]. 计量与测试技术, 46(6): 41–44. SHEN RUI, 2019. HM2000 Argo buoyancy mechanism test platform design[J]. Metrology & Measurement Technique, 46(6): 41–44 (in Chinese with English abstract).
汪俊, 邱艳, 阎贫, 等, 2019. 跨南海西南次海盆OBS、多道地震与重力联合调查[J]. 热带海洋学报, 38(4): 81–90. WANG JUN, QIU YAN, YAN PIN, et al, 2019. A joint investigation using OBS, multi-channel seismic and gravity data across the southwestern sub-basin of the South China Sea[J]. Journal of Tropical Oceanography, 38(4): 81–90 (in Chinese with English abstract).
王世明, 吴爱平, 2010. 液压技术在ARGO浮标中的应用[J]. 流体传动与控制, (1): 50–53. WANG SHIMING, WU AIPING, 2010. Application of hydraulics in ARGO buoyage[J]. Fluicl Power Transmission and Control, (1): 50–53 (in Chinese with English abstract).
吴庆凯, 周超, 张薇, 2015. 绕流阻力系数研究综述[J]. 嘉应学院学报(自然科学), 33(11): 53–57. WU QINGKAI, ZHOU CHAO, ZHANG WEI, 2015. Review on the research of flow resistance coefficient[J]. Journal of Jialing University (Natural Science), 33(11): 53–57 (in Chinese with English abstract).
熊小峰, 游森勇, 2011. 物块落水后运动过程的动力学分析[J]. 数学的实践与认识, 41(14): 91–99. XIONG XIAOFENG, YOU SENYONG, 2011. Dynamical analysis for process of objects falling into water[J]. Mathematics in Practice and Theory, 41(14): 91–99 (in Chinese).
许传才, 1998. 球形沉子在水中沉降规律的研究[J]. 大连水产学院学报, 13(4): 22–27. XU CHUANCAI, 1998. Research and analysis on the subsiding regnlerity of sinkers in water[J]. Journal of Dalian Fisheries University, 13(4): 22–27 (in Chinese).
余立中, 商红梅, 张少永, 2001. Argo浮标技术研究初探[J]. 海洋技术, 20(3): 34–40. YU LIZHONG, SHANG HONGMEI, ZHANG SHAOYONG, 2010. Elementary introduction of Argo buoy technological study[J]. Ocean Technology, 20(3): 34–40 (in Chinese with English abstract).
张树良, 鲁景亮, 2016. 普林斯顿大学成功开发新的海底地震监测设备[J]. 国际地震动态, (12): 3. ZHANG SHULIANG, LU JINGLIANG, 2016. Researcher measures earthquakes in the oceans[J]. Recent Developments in World Seismology, (12): 3 (in Chinese).
周公威, 张爽, 2014. 近三十年来海洋地震观测的发展[J]. 国际地震动态, (1): 18–24. ZHOU GONGWEI, ZHANG SHUANG, 2014. International ocean seismic observation in the past 30 years[J]. Recent Developments in World Seismology, (1): 18–24 (in Chinese with English abstract).
宗正, 熊学军, 胡筱敏, 等, 2018-01-05. 油囊式水下滑翔机浮力精确控制方法: 中国, CN201710667016.1[P]. ZONG ZHENG, XIONG XUEJUN, HU XIAOMIN, 2018-01-05. Oil sac-type underwater glider buoyancy accurate control method: CN, CN201710667016.1[P]. (in Chinese)
邹一麟, 曹军军, 姚宝恒, 等, 2018. 新型蓄能器浮标上浮运动水动力性能研究[J]. 舰船科学技术, 40(3): 42–48. ZOU YILIN, CAO JUNJUN, YAO BAOHENG, et al, 2018. Research on the dynamic performance of floating motion of a new type float with energy accumulator[J]. Ship Science and Technology, 40(3): 42–48 (in Chinese with English abstract).
BIGOT-CORMIER F, BERENGUER J L, 2017. How students can experience science and become researchers: tracking MERMAID floats in the Oceans[J]. Seismological Research Letters, 88(2A): 416–420.
GOULD W J, 2005. From Swallow floats to Argo-the development of neutrally buoyant floats[J]. Deep Sea Research Part II: Topical Studies in Oceanography, 52(3–4): 529–543.
JOCOBSON R S, DORMAN L M, PURDY G M, et al, 1991. Ocean bottom seismometer facilities available[J]. Eos, Transactions American Geophysical Union, 72(46): 506–515.
Design and test of a new mobile submersible deep-sea seismic recording system
MENG Ken1, 2, QIN Huawei1, ZHU Xinke2, HOU Fei2
1. Hangzhou Dianzi University, School of Mechanical Engineering, Hangzhou 310018, China; 2. Second Institute of Oceanography, Ministry of Natural Resources, Key Laboratory of Submarine Science, Hangzhou 310012, China
In view of the lack of marine seismic network at home and abroad, a mobile earthquake recording system in marine areas by independent divers (MERMAID) is introduced for global sea-area application. According to the research and development process of the mobile seismic recording system, the general design requirements and typical work cycle processof the buoy are established; the hydraulic buoyancy regulating system and mechanical structure are designed; comparison and analysis of different speeds and negative buoyancy diving process are carried out; and the laboratory pressure test and Qiandao Lake test are realized. The test results show that the MERMAID buoy can keep good sealing and stability under 15 MPa pressure, and the P wave of natural earthquake can be effectively collected by hydrophone, and the energy consumption of each module in a single period can be calculated to verify the design indicators.
seismic network; mobile seismic recording system; MERMAID buoy; buoyancy mechanism; natural earthquake
P716+.83
A
1009-5470(2020)03-0049-08
10.11978/2019095
http://www.jto.ac.cn
2019-09-23;
2020-01-03。
林强编辑
国家重点研发计划(2017YFC0305802)“全球变化与海气相互作用”专项(GASI-02-SHB-15)csio.ac.cn
孟肯(1996—), 男, 陕西省渭南市人, 硕士研究生, 主要研究方向为海洋观测设备结构设计。E-mail: mengken@hdu.edu.cn
秦华伟(1976—), 男, 山西省长治市人, 博士, 主要研究方向为海洋机电装备技术。E-mail: qinhw@hdu.edu.cn
*衷心地感谢审稿专家提供宝贵的修改意见及编辑部老师们的耐心沟通
2019-09-23;
2020-01-03.
Editor: LIN Qiang
National Key Research and Development Program of China (2017YFC0305802); Global Change and Air-Sea Interaction Project (GASI-02-SHB-15)
QIN Huawei. E-mail: qinhw@hdu.edu.cn
