浅谈H-ADCP声道探测及数据处理分析方法
2020-05-18张小路
张小路
上海水辰信息科技有限公司 上海 200126
引言
H-ADCP是英文Horizontal Acoustic Doppler Current Profiler的缩写。中文通常译为水平声学多普勒流速剖面仪。H-ADCP是一种利用声学多普勒原理测验水流速度剖面的仪器。H-ADCP一般配备有二个(或四个)换能器。换能器与轴线成一定夹角。每个换能器既是发射器又是接收器。换能器发射的声波具有指向性,即声波能量集中于较窄的方向范围内(称为声束,类似于探照灯发射的光束)。换能器发射某一固定频率的声波,然后聆听被水体中颗粒物散射回来的声波。
H-ADCP通常安装在河流或渠道的岸边,向水体中发射超声波,可以实时在线采集高质量的流速、水位、流量数据。它标准配置高、功能强、适用范围广,很容易与RTU集成为自动水量遥测系统(站)。采用Teledyne RDI公司宽带ADCP专利技术,高精度、高分辨率;对于很难测验的低流速和非恒定流也能获得高质量测验数据;标准配置超声波水位计、压力水位计、姿态传感器(横摇、纵摇),4Mb内存;直接输出流速、水位、流量数据,易与RTU集成;标准配置128个用户可选单元;三种频率型号(300KHz,600KHz,1200KHz)可供选择。
在安装H-ADCP前期,需结合H-ADCP设备的技术特点和水文历史资料,对安装区域内的水下地形进行测量,将数据处理成大断面成果图、等高线图等形式,分析和设计H-ADCP预期的安装高程位置和测量的范围距离等,避免出现因设计造成的安装不合理,影响仪器的工作性能。
1 H-ADCP声道探测
H-ADCP设备主要有两种安装方式,一种是水平式,一种是垂直(座底)式。本文主要对600KHZ H-ADCP(标称最大测量距离为90米,波速水平开角为左右20°,垂直开角为上下1.5°)水平式安装时声道探测的方法做具体阐述。
根据《声学多普勒流量测验规范》(SL337-2006)、《感潮河段与濒海水文测验及资料整编技术规范》(DB31/T 763-2013)及《感潮水文测验规范》(SL 732-2015)等相关规范规定,采用H-ADCP轴方向应与断面方向一致,声束平面的前方,H-ADCP 600KHZ波速水平开角一般为左右20°,考虑到旁瓣因素的影响,在左右45°扇形范围内,应无任何遮挡物,水下无障碍物突起阻碍。剖面长度和安装高度的布置,应避免声束远端接近水面或者河底[1]。
假设河道面宽为110米,以H-ADCP轴方向(AJ)为基准,采用断面法进行声道探测,左右20°范围内AEF区域为核心探测区域,里程在K0-040和K0+040之间区域间隔2米施测,共需施测41个横断面。左右20°~45°扩展范围IHGF和BCDE区域内,里程在K0-090~K0-040和K0+040~K0+090之间区域间隔10米施测,共需施测10个横断面。 横断面布置示意图如下:

2 测验方案
2.1 横断面位置确定
利用cad多段线功能和list命令将规划好的断面位置的河岸起止点坐标导出,将所有坐标点导入GPS手薄内,到达测量河道区域现场后利用RTK-CORS进行坐标放样,并用油漆进行标记,确定测量大断面位置[2]。
2.2 水深测量
利用智能测绘无人船进行现场水深及其该水深对应的城建坐标测量,无人船系统主要包括:单波速测深系统、地面控制基站、接收中继设备、智能遥控器、数据处理软件等。测量前需要进行测深仪的校核,平面控制点使用网络GPS RTK 测量,链接SHCORS基准站,RTK流动站手簿内置测区平面坐标转换七参数,为验证平面坐标转换参数与平面控制点的精度,校核上海市测绘院GPS控制点,平面坐标较差小于限值,以满足GPS RTK观测作业及点位平面定位精度满足规范及本项目平面控制精度要求。采用GNSS RTK配合测深仪的方式,利用GNSS RTK获取测深点的实时三维坐标,利用测深仪同步采集测深数据[3]。
测量过程中,由于采用有验潮方式测量,无人船在测量前应对测深仪换能器入水深度准确进行“动吃水”测定,在测量中应根据设定的“动吃水”值保持相应的测量航速,如施测过程中发生测船变速或停顿应作记录并进行验核,测量中设置偏航距不大于1/200河宽与2米的较大值,此偏航距以外数据不记录,记录好每次测量的起始和结束时间,数据密采方式实测,记录测深仪每一测深信号。
2.3 水位观测
如果现场有水文站,每5分钟观测一次水位,用于水下高程的计算,如无水位数据,需采用四等几何水准引测附近国家基本水准点高程至测量区域,设置临时水尺,观测并记录水位[4]。
2.4 陆上域部分测量
陆上部分采用全站仪、RTK、水准仪测量,采用全站仪进行高程测量,视距超过250m,应对三角高程测量进行曲率改正。
3 数据分析与处理
3.1 横断面资料处理
从无人船软件中导出测点数据,检查其平面位置和高程值,剔除粗差点。利用Cass软件将测得水下地形高程数据和全站仪测得的陆上部分数据展绘到CAD图上,注意无人船测得数据需要根据水位和水深数据按照时间计算相应的高程。按照规划的大断面位置,利用Cass软件按照水道0.5米间隔和陆上部分1米间隔提取出各个断面测点高程和城建坐标数据。
将处理好大断面数据按照里程K0-090~K0+090编号分别保存备用,利用自编软件,提取各个大断面的数据,设置分层情况、横纵比例尺、0点坐标插入点等,生成CAD可以导入的“*.lsp”文件,格式如下[5]:
(command “layer” “new” “layer199905041453-0”“”)
(command “layer” “set” “layer199905041453-0”“”)
(command “text” “r” “16.500000,84.970000”1.000000 0 “K0+000”)
(command “line”
“0.000000,84.250000”
“2.000000,84.200000”
“3.000000,83.950000”
将生成好的“*.lsp”文件加载到事先准备好的大断面绘制的网格上。
3.2 等高线制作
按照里程、起点距、高程的顺序准备好的大断面资料,利用surfer软件导入“网格数据”,如需在实测河道上展开,还需导入“基底图”,生成“*.grd”文件,利用“等值线”功能导入“*.grd”文件,设置好“线条属性”、“等值线间隔”、“等值线最大值”、“等值线最小值”、“填充色”、“字体”等,自动生成等高线图形。用于查看现场区域内的河道水下地形的情况,方便对H-ADCP进行安装高程和测量距离的分析。Surfer软件制作等高线示意图和导入surfer软件大断面资料格式详见下图[6]:

3.3 声道探测结果分析
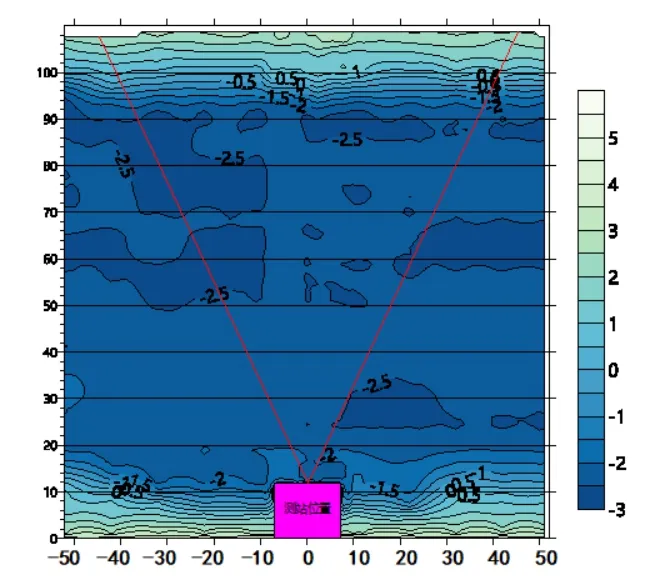
根据4.1生成好的大断面图,将H-ADCP放置到相应的起点和安装高程位置(下图A位置),检验垂直方向1.5°是否有受到河底影响、是否在历史最低水位时声束会露出空气等,水平方向20°内是否有浅埂因素影响,示意图如下[7]。

4 结束语
H-ADCP前期的声道探测非常有必要性,可以避免一些因安装位置不合理、不符合规范造成的麻烦,从而影响流量遥测和比测率定工作,然而声道探测和数据分析工作并不能百分百保证仪器安装后完全没有问题。需要在安装前对河道安装位置的上下游区域进行排摸和分析,距离测流断面5倍河宽且至少200 m的范围内,应无密集或大型的船只抛锚 、停泊、施工和其他因素造成的阻水、断面压缩、水流紊乱、流速分布异常等情况,断面上下游各1 km 范围内无水文测验正常作业和安全生产的影响因素存在。了解引排水的特性、流场情况、历史水文资料情况等。安装后还需做一段时间的跟踪分析,确定较好的安装位置和测量距离。对于符合安装条件但声道探测情况不够理想的情况,笔者建议对河道现场进行疏浚,确保仪器发挥最佳性能,为流量遥测和比测率定工作打下良好的基础。