基于小波包和神经网络的行星齿轮箱故障模式识别技术
2020-05-11黄晋英
罗 佳,黄晋英
(中北大学机械工程学院,太原 030051)
0 引言
武装直升机是陆军主战主用型装备,随着武器系统性能逐步提高,结构组成日趋复杂化。行星齿轮箱是其机械传动系统中重要的零部件,通常工作在低速重载的恶劣环境下,其关键部件出现故障的概率很高,为了减少事故发生,降低维修成本,开展行星齿轮箱的故障诊断工作十分必要[1]。
齿轮箱故障诊断的关键是对振动信号的处理。受结构因素如噪音,振动信号通常表现为非线性,非平稳特征[2]。目前,采用基于振动能量变化(功率谱分析)是齿轮箱故障诊断最基本研究方法[3],然而,传统的功率谱分析方法是对信号全过程的频谱分析,缺乏对信号局部特性的分析[4]。随着各种新科技、新技术的产生,行星齿轮箱故障诊断技术的发展也日新月异,例如小波变换,小波包变换,神经网络,深度学习等,进一步提高了故障诊断的快速性和准确率。本文结合武装直升机武器系统的诊断实际,利用小波包分解技术,以每个频段的能量作为行星齿轮故障特征值,结合非线性逼近能力较强的BP 神经网络对特征值进行分类识别,提出了小波包和BP神经网络相结合的行星齿轮箱故障识别方法。
1 小波包变换和BP 神经网络相结合的诊断方法
小波包分析方法同时对低频和高频进行分解,得到更详细的小波分解信号信息,即能够准确地看到分布在各个频带上的原始信号的详细信息,如信号变化时的时间点等。因此,通过对振动信号的分析,得到了时频信息[5]。BP 神经网络能够实现数据非线性的映射,输入故障信息的数据样本,神经网络便可以使新数据“逼近”期望目标[6]。小波包和BP 两种方法结合构建小波神经网络,可以对振动数据信号进行详细的处理和数据分析。
基于Daubechies 小波包变换和BP 神经网络相结合的齿轮箱故障诊断方法,对齿轮箱振动信号进行去噪、分解与重构,提取不同频带能量的故障特征,并输入BP 神经网络,准确率较高。
行星齿轮箱故障诊断实现框图如图1 所示。
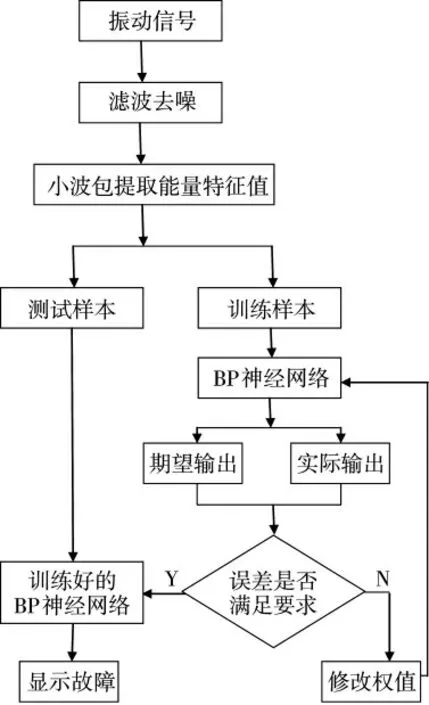
图1 行星齿轮箱故障诊断框图
1.1 小波包变换
利用小波包分析方法对信号进行时域和频域分析,有效地实现了非平稳信号的特征提取[7]。小波包分析是小波分析的一种扩展,对信号进行分解和重构[8-9],信号分析功能更强,小波包的三层分解过程如图2 所示。

图2 小波包分解树形结构
图2 中(0,0)表示原始信号,(i,0)表示小波包的第i 层的低频系数Xi0,(i =1,2,…,7)。对小波包进行重构,提取各频带范围的信号,设S3j是X3j的重构信号,则总信号可表示为:

假设原始信号中,最低频率成分为0,最高频率成分为a,则提取的8 个频率成分所代表的频率范围见表1。

表1 8 个频率成分所代表的频率范围(单位:Hz)
1.2 BP 神经网络
由传感器测得的齿轮箱振动信号和实际的故障原因之间存在着复杂的关系,通常反映在非线性关系上。BP 神经网络有较好的非线性映射能力,将信号特征和故障模式有机地联系起来。
基于BP 神经网络的齿轮箱故障建模包括3 部分:BP 神经网络构建、BP 神经网络训练和BP 神经网络分类[10]。
利用BP 神经网络进行齿轮箱振动信号故障识别的实现方案如下:
1)提取能量特征:利用Daubechies 小波包分解将振动信号分解到各个频段,提取各频段能量特征;
2)特征向量数据归一化:将提取到的能量特征向量进行归一化处理;
3)建立神经网络模型:确定网络层数及各层节点数目;
4)训练网络:用归一化后的特征向量组成网络学习样本集对BP 神经网络进行训练,确定权值和阈值,训练后的网络就是齿轮箱振动信号故障识别网络;
5)齿轮箱故障识别验证:用检验样本检验网络识别齿轮箱故障的能力。
2 实验研究
2.1 HFXZ-I 行星齿轮箱故障诊断实验平台
1)组成。变速驱动电机、轴承、斜齿轮箱、行星齿轮箱、磁粉制动器、变频驱动控制器和负载控制器等(见图3),同时配备断齿齿轮,磨损齿轮。

图3 HFXZ-I 行星齿轮箱实验系统平台
2)内部结构。故障诊断实验平台中的行星齿轮为单排行星齿轮,即齿圈固定,太阳轮是主动轮,行星轮是从动轮,3 个行星轮与行星架装配在一起,行星架带动行星轮旋转,同时与太阳轮和内齿圈啮合。从图4 中可以看出,太阳轮与斜齿轮输出轴同轴,斜齿轮的转速即为行星齿轮箱中太阳轮的转速,将动力传递给负载(增加负荷齿轮故障信号可增强)。
3)系统主要参数。系统主要参数见表2。

表2 HFXZ-I 行星齿轮箱参数表
2.2 测点位置选择
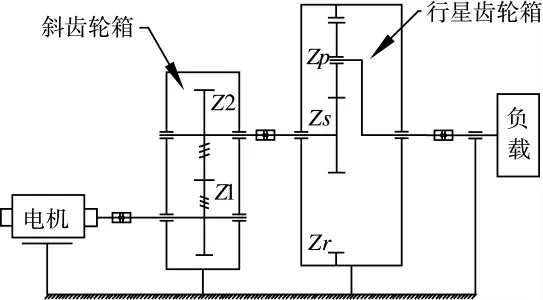
图4 行星齿轮箱实验系统结构示意图
传感器测点位置的选定对于信号的采集有着重要的影响,位置较好的测点能够提高信噪比,有利于从夹杂着振动的复杂信号中提取出微弱的特征信号,从而能有效地进行故障诊断,降低工作难度。由于此行星齿轮箱的齿圈和箱体不是相连的,而是分离的,在这种情况下,传感器位置的选择需要考虑故障齿轮啮合点至传感器的振动传递路径的变换,保证发生故障的振动源到测量振动的传感器为直接振动传播。在本实验中将传感器安装在齿轮箱的外表面对故障较为敏感的中间位置(布置两个测点),选择齿轮箱轴承正中间,离感应太阳轮故障最近的箱盖侧面,即径向平行方向,将传感器吸附在上面。如图5 所示。

图5 测点位置分布图
2.3 实验方案
利用图5 所示的行星齿轮箱故障诊断实验平台模拟工作状态,通过安装在齿轮箱体表面顶部的加速度传感器测试振动信号,采样频率为10 240 Hz,输入电机转速为1 500 r/min,0 负载,0.33 A 负载和0.84 A 负载情况下采集数据。实验分4 次进行,分别对应4 种不同故障模式:a(正常),b(太阳轮断齿),c(行星轮磨损),d(太阳轮轴承外圈裂纹)。根据行星齿轮箱的结构参数和转速,可以计算出各齿轮的故障特征频率,如表3 所示。

表3 行星齿轮箱的特征频率(单位:Hz)
2.4 实测数据处理及分析
将消噪后的振动信号进行小波包分解,基函数采用db 1 小波,分解层数为3 层,将信号分解为8个不同的频带,分别重构8 个频段的系数,并计算各个频段的能量。图6 为4 种工况下振动信号进行3 层小波包分解后的能量分布图,表4 显示了在4个条件下加速度传感器在测试点1 处提取的特征向量。
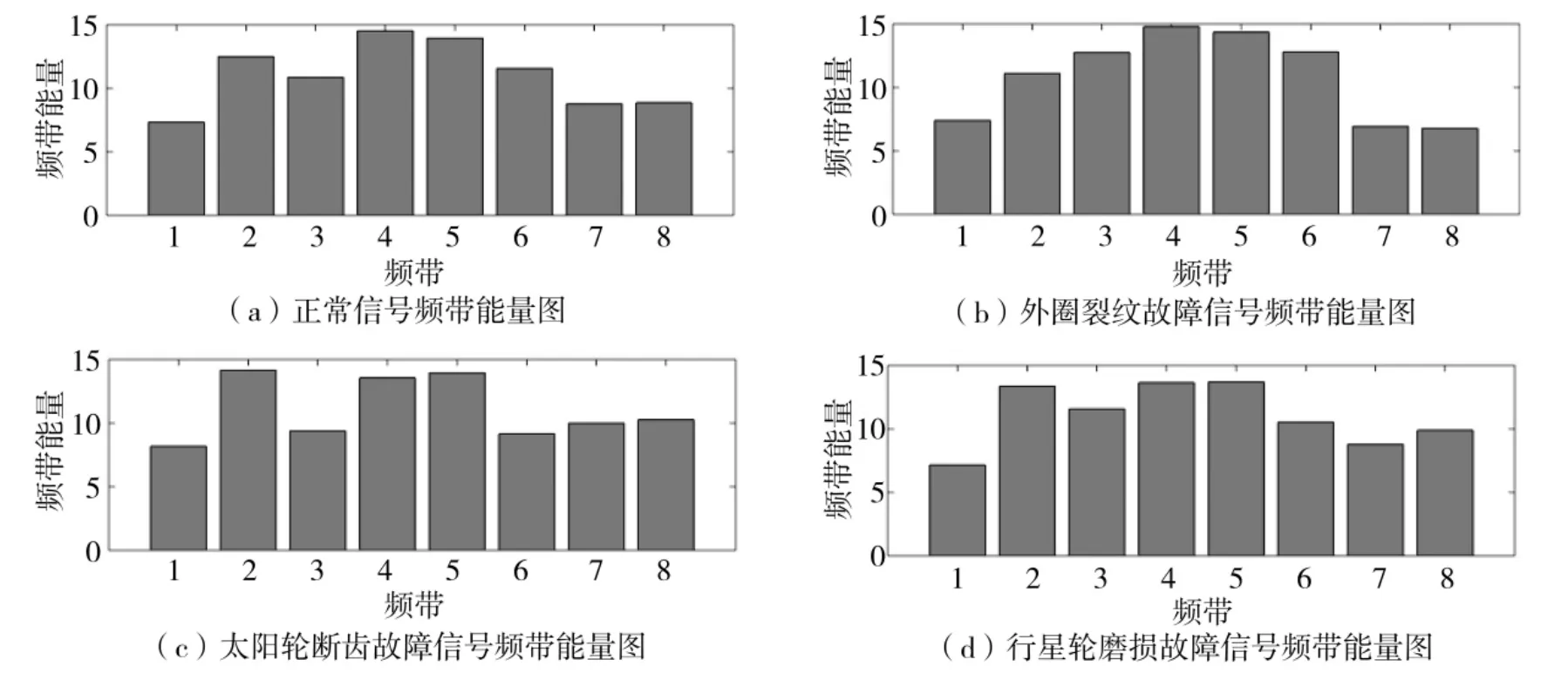
图6 4 种状态下(0.84A 负载)振动信号小波包能量分布

表4 db1 小波包分解后的频带能量分布
从特征向量在频带上分布图的结果表明,齿轮箱在不同频率范围内的特征向量分布有明显的差异。因此,振动信号的8 个能量特征值可以用作神经网络的输入向量,对齿轮箱故障类型进行识别。
研究的行星齿轮箱状态有正常状态,太阳轮轴承外圈裂纹,太阳轮半个齿截断,行星轮磨损,共4种状态。每种状态又分为3 种工况,0 负载,0.33 A负载和0.84 A 负载。齿轮箱实验时,在其不同部位共布置了2 个加速度传感器(如图5),每个传感器在不同状态不同工况下采集6 组数据,共采集24组特征向量。
设置BP 神经网络的输出向量T(行星齿轮箱正常,太阳轮轴承外圈裂纹,太阳轮半个齿截断,行星轮磨损),当T 的某个元素为1 时,行星齿轮箱处于当前状态,在不同状态下对应的输出向量为:
行星齿轮箱正常(0 0 0 1);
太阳轮轴承外圈裂纹(0 1 0 0);
太阳轮断齿(1 0 0 0);
行星轮磨损(0 0 1 0);
下页图7 为BP 神经网络故障分类识别结果图,从图中设置可以看出,网络输入个数为8,分别对应行星齿轮箱8 个频段的能量特征向量,隐层神经元个数为10,设置训练迭代次数为1 000,训练目标误差为0.001,14 组样本用于网络训练,其中网络训练函数为trainlm 函数(Levenberg-Marquardt 算法),用10 组样本对神经网络的识别能力进行测试。

图7 BP 神经网络分类识别结果
在建立初始网络模型后,将训练样本输入到神经网络中进行训练,从图8 所示的训练误差变化曲线可以看出trainlm 函数具有比较快的收敛速度,经过11 次迭代,网络达到目标要求。10 组测试样本故障模式识别结果如表5 所示。
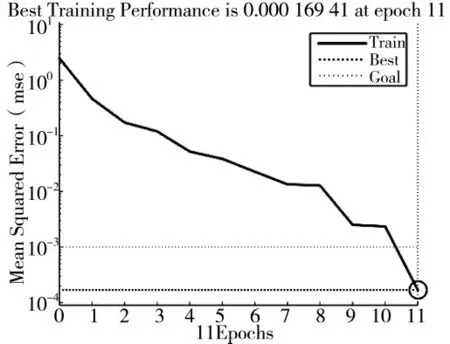
图8 BP 神经网络训练误差变化曲线
从表5 可以看出,在4 种状态下,网络实际输出向量和期望输出向量是一致的,表明BP 神经网络的预测结果是准确的,也表明训练后的神经网络具有良好的泛化能力,可以进行准确的故障模式的分类。
3 结论
实验表明,利用DB1 小波包变换方法对振动信号进行分解,将能量特征向量输入BP 神经网络作为输入样本进行故障识别,其具有较高的准确识别率。用这种故障诊断方法进行故障特征提取和诊断时,无需诊断系统模型,便可以迅速地进行故障模式识别,说明此方法是行之有效的。

表5 db1 小波包神经网络诊断部分结果
将此方法应用于武装直升机武器系统的故障诊断中,能够快速准确地查找故障部件和科学制定排故障方案,对于战时装备保障指挥具有重要的意义和作用。
