基于预期偏移距离的人机权值分配策略研究*
2020-05-09陈无畏王其东丁雨康赵林峰王慧然谢有浩
陈无畏,王其东,2,丁雨康,赵林峰,王慧然,谢有浩
(1.合肥工业大学汽车与交通工程学院,合肥 230009; 2.合肥学院机械工程系,合肥 230071;3.安徽猎豹汽车有限公司,滁州 239064)
前言
汽车的面世,极大地方便了人们的出行,但频发的交通事故同样也在威胁着人们的生命和财产安全。为保证行车安全,高级驾驶辅助系统(ADAS)应运而生,维持车辆行驶在道路中心线附近的车道保持辅助系统(LKAS)即为其典型产品[1-2]。但由于LKAS和驾驶员在转向任务中都拥有自己独立的控制方式,容易造成二者在控制上的冲突,因而进入21世纪后,在车辆的主动安全领域出现了并行发展的两条路线:一条是不依赖于驾驶员的全自动驾驶路线;另一条则是允许驾驶员介入对车辆控制的半自动驾驶路线。
自动驾驶技术在现阶段的发展尚不完善,并且从享受驾驶乐趣的角度出发,驾驶员往往更希望将辅助系统定位在“引导者”的角色,而非取代驾驶员。因此,需要对驾驶员和辅助系统进行协调控制。根据驾驶员和辅助系统是否同时处于控制回路中,可将协调控制策略分为权限切换和权值分配两类。前者通过特定条件下的操作权限移交来避免控制冲突,但难以充分发挥系统的辅助作用[3-4];后者在驾驶员和辅助系统之间进行合适的权值分配,从而协调二者的控制效果。文献[5]和文献[6]中探究了不同程度的权值分配对路径跟踪效果的影响,但如何制定合适的权值分配函数仍有待解决。
权值分配有两种实现途径[7],其一为触觉反馈式共享控制(haptic shared control,HSC)。在设计横向运动控制器时考虑驾驶员的控制作用,将其转向力矩Td或转角δd作为状态量,建立—人—车 路闭环模型,助力力矩Ta经由转向盘反馈给驾驶员,提供触觉引导。文献[8]中针对驾驶员行为的不确定性,基于H2优化控制理论建立协调控制器;文献[9]中将驾驶员的控制介入作为带约束的优化问题来处理,在MPC框架下设计横向运动控制器。HSC通常以车辆的预瞄偏差或方位偏差为优化目标,基于现代控制理论(如最优控制)设计横向运动控制器。其优点在于路径跟踪精度高,易满足稳定性等方面的限制要求,但辅助系统对驾驶员的干预程度较大,缺乏具体的权值分配函数,无法优先保证驾驶员的控制权限。
另一种进行权值分配的方式为混合式共享控制(blended shared control,BSC)。驾驶员和辅助系统独立决策出各自的转向控制量,经由具体的权值分配函数作用后再共同施加到转向管柱上。由于模糊控制在拟合非线性关系上的突出表现,文献[10]和文献[11]中建立了模糊协调控制器,以预瞄偏差yL和驾驶员转矩Td为输入,以驾驶员权值w为输出,权值分配函数隐藏在隶属度函数和模糊规则中,但模糊规则的建立过程较为复杂,驾驶员和辅助系统之间的分配关系仍不明朗,协调控制器的作用更多的是在权值w和控制精度之间做了简单的折中。因此,BSC通常基于某项指标来进行设计。文献[12]中从稳定性的角度出发,基于前轮侧偏角设计权值分配函数,辅助系统在车辆具有失稳趋势时介入转向控制,但未考虑横向运动控制精度的问题。文献[13]中以预瞄偏差yL为权值分配函数的自变量,辅助系统的介入作用随yL的增大而加大,但并未考虑驾驶员在当前时刻的纠正作用,因而容易过度评估危险度等级,尤其在弯曲道路上。文献[14]中依据驾驶员转矩大小设计权值分配函数,但是难以保证横向运动控制精度。
上述文献中在进行权值分配时以保证动力学响应指标(如侧向偏差、方位偏差等)为优先控制目标,但权值分配的目的是为了保证驾驶员的控制权值,而非追求位置偏差最小,因此容易出现驾驶员的控制权值较低,而辅助系统过度干预的情况。
针对上述问题,本文中在BSC框架下提出一种权值分配策略,通过驾驶员的实时控制作用对预瞄偏差yL进行纠正,获取预期偏移距离(preview distance to lane center,PDLC),设计权值分配函数,以实现在一定的横向运动控制精度下优先保证驾驶员控制权值的目的,通过调节反应时间常数获得处于不同驾驶状态(比如疲劳状态)的驾驶员模型,设计了几种典型的驾驶员误操作行为,对不同驾驶员在权值分配策略参与前后的行车表现进行了对比,分析了权值分配策略在提高横向运动控制精度、降低工作负荷、纠正误操作行为方面对驾驶员的辅助作用。
1 人—车—路模型
采用LKAS追踪理想道路中心线时可不考虑车辆的纵向运动特性,忽略其侧倾和俯仰运动。设预瞄距离为ls,车辆在预瞄点处距车道中心线的距离为yL,车辆与车道线的相对横摆角为ψL,道路曲率为ρ,则车辆的侧向动力学特性可由下列简化的2自由度模型表示。

其中:
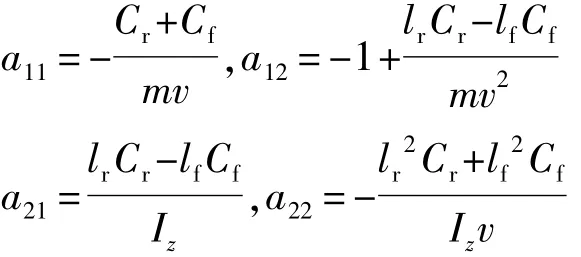
式中:β为质心侧偏角;r为横摆角速度;Cf和Cr分别为前后轮胎的侧偏刚度;lf和lr分别为质心至前、后轴的距离;m为整车质量;v为纵向车速;Iz为车辆绕z轴转动惯量;控制输入δd为前轮转角。
车辆和道路的相对位置关系为

道路的曲率一般较小,为简化计算,忽略式(2)中的vρ项并联立式(1)可得车辆 道路模型:

式中:x=[βrψ y]T为状态变量;控制量 u=δ。
vLLvd
为将驾驶员纳入控制回路,增加转向系统模型以考虑驾驶员输入转矩对车辆运动的影响,从而联立得到人—车—路模型,增广后的状态变量 xc=则人 车 路模型为

其中:
式中:控制输入u=Td;Js为转向系统的等效转动惯量;Bs为转向系统的等效阻尼系数;Rs为转向系统传动比;ηt为轮胎接触地面宽度。
2 人机权值分配策略
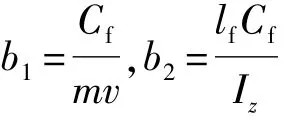
横向运动控制中的人机权值分配策略框图如图1所示。协调控制层的作用在于权值分配,根据驾驶员和LKAS的转矩差异对预瞄偏差yL进行修正以获取预期偏移距离lPD,权值分配函数根据lPD计算出驾驶员权值w。横向控制层的作用是决策出使车辆追随道路中心线所需的控制量,令驾驶员和LKAS各自决策出的控制量分别为Td和Ta。由于在机械转向系统中,Td完全作用在转向管柱上,无法直接调节,因此根据Td、Ta和w计算出相应的助力转向力矩Tz,从而对驾驶员进行转向引导或纠偏。
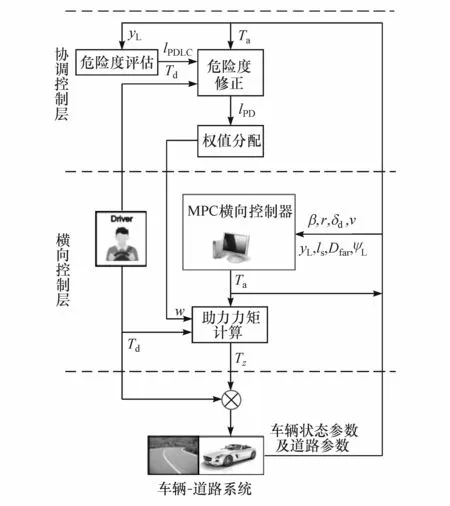
图1 人机权值分配策略控制框图
2.1 MPC横向运动控制器设计
考虑到控制过程中存在诸多约束,横向运动控制器基于模型预测控制(model predictive control,MPC)理论建立。MPC的优化过程是有限时域内的滚动优化过程,具有控制效果好,鲁棒性强,能较好地兼顾控制目标和系统约束等优点。
为更符合实际驾驶员的转向特征,根据两点预瞄原理,以近视角θnear、近视角变化率θ·near和远视角变化率θ·far为控制器的输出量,近视角和远视角的求解公式如下:

式中:ls为前述的近预瞄距离;Dfar为远预瞄距离;Rv为车辆的转向半径。

其中:
令ξ=[xcu]T为增广后的状态变量,则式(4)可改写为下述以控制增量 Δu为控制量的状态方程:

其中:

假设:预测时域为 Np,控制时域为 Nc,式(8)中预测时域内状态方程中的矩阵参数保持不变,则系统的状态量ξ和输出量η可用下式计算。
ξ(t+Np|t)=ANpξ(t|t)+
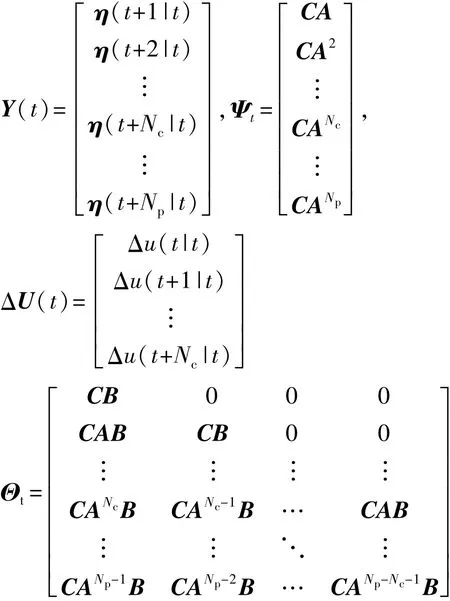
系统在预测时域内的输出以矩阵为

其中:
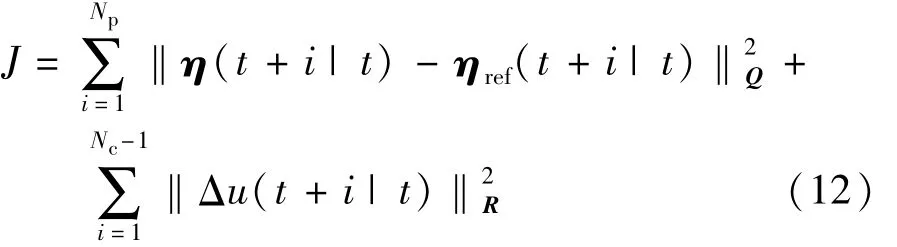
优化目标函数如式(12)所示,第1项由系统输出量构成,表征了控制系统对参考轨线的跟随能力;第2项则反映了系统对控制量平稳变化的要求,以避免瞬时转矩过大,Q和R是权重矩阵。
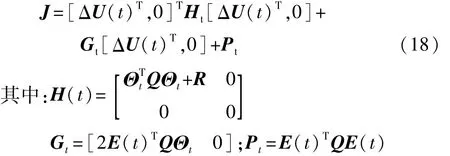
MPC控制在每一个采样时刻的带约束的优化求解问题即转化为求解式(18)的二次规划问题,解序列中的第一个值将作为下一个采样时刻的控制输入。
2.2 权值分配策略
权值分配策略的作用是协调驾驶员和LKAS的控制效果,在维持一定横向运动控制精度的前提下给予驾驶员更多的控制权值。控制效果主要体现在两方面:横向运动控制精度和驾驶员的主观感受。
由于驾驶员生理上的限制,比如神经反应滞后和操作反应滞后,导致其跟踪效果不如LKAS准确稳定,因而提高辅助系统的权值有利于提高横向运动控制精度。而在驾驶员的主观感受方面,根据Mars[5]和 Iwano[6]等人的研究,辅助系统权值较低时的作用在于“触觉引导”,指引驾驶员正确转向;但随着其权值的增加,驾驶员会逐渐觉得车辆不受控制,直至辅助系统权值增加到一定程度(即达到某一
此外,控制系统还须满足一定的限制条件。由于执行机构的限制和防止瞬时转矩过大,需要对控制量和控制增量进行约束;为保证行车安全,输出量需要限制在一定范围内;在稳定性方面,车辆的质心侧偏角也有相应的要求:
式中:k=0,…,Nc-1。
预测时域内的输出量偏差可表示为

其中 Yref=[ηref(t+1|t),…,ηref(t+Np|t)]T由式(11)和式(12),优化目标可调整为阈值)后,会造成驾驶员对辅助系统的不信任,乃至产生心理上的恐慌。
因此,在进行控制权值分配时应依循下述原则:(1)为保证驾驶员的主观感受,须增加驾驶员权值w;(2)为提高横向运动控制精度,须增加辅助系统权值 z,z=1-w;(3)为减少驾驶员对辅助系统的不信任感,要尽量避免w<0.5的情况。
本文中采用预期偏移距离lPDLC来衡量车辆偏离程度,预期偏移距离定义为车辆在预瞄点处偏移道路中心线的距离:

lPDLC值越小则车辆在接下来的预瞄时间内的横向运动控制精度越高,相应的可为驾驶员分配更多的控制权值。
仅采用yL衡量车道偏离程度时未考虑驾驶员的控制作用,可能会导致危险度的过度评估,尤其是在弯曲道路上。为此,根据Td和Ta间的转矩偏差ΔT对lPDLC进行修正:

其中:

我国高速公路的车道宽度为3.75 m,而轿车的宽度大多在1.6~1.8 m,则可将lPD分为3个部分:(1)安全区域(0~0.3 m),车道偏离程度较低,驾驶员占主要控制权限;(2)一般区域(0.3~0.6 m),车道偏离现象较为明显,应逐渐提高辅助系统的控制权值;(3)危险区域(0.6 m以上),此时意味着车辆有冲出车道的趋势。由于驾驶员对线性函数的适应度最好,以及为了便于控制,具体的权值分配函数如式(21)所示。由于辅助系统权值超过0.5后会增加驾驶员对辅助系统的不信任程度,因此增加了w=0.5这一范围的比重。
经过权值分配后,最后施加到转向盘上的等效转向力矩为

式中:Tass为权值分配后施加到转向系统的转向力矩;Td为驾驶员施加的转向力矩;Ta为辅助系统决策出的理想转向力矩。
实际上,相较于线控转向系统中可直接对驾驶员的输入作用进行调节,机械转向系统中驾驶员施加的转向力矩Td完全作用到了转向管柱上。为达到权值分配的效果,设辅助系统实际提供的转矩为Tz,则权值分配后施加到转向系统的转向力矩为

辅助系统将通过Tz引导驾驶员正确转向、降低其工作负荷以及纠正车辆的偏离行为。

3 仿真结果分析
采用权值分配进行驾驶员和辅助系统之间的协调控制,其重要作用在于提高路径跟踪精度、降低驾驶员工作负荷以及提高横向控制中的抗干扰能力。为分析本文中所提出的权值分配策略对驾驶员的辅助作用,进行CarSim/Simulink联合仿真。仿真道路采用如图2所示的Alt 3 Road from FHWA,车速为20 m/s。模型主要参数如表1所示。
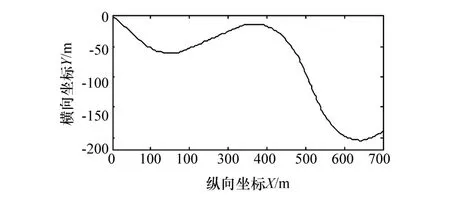
图2 仿真路径
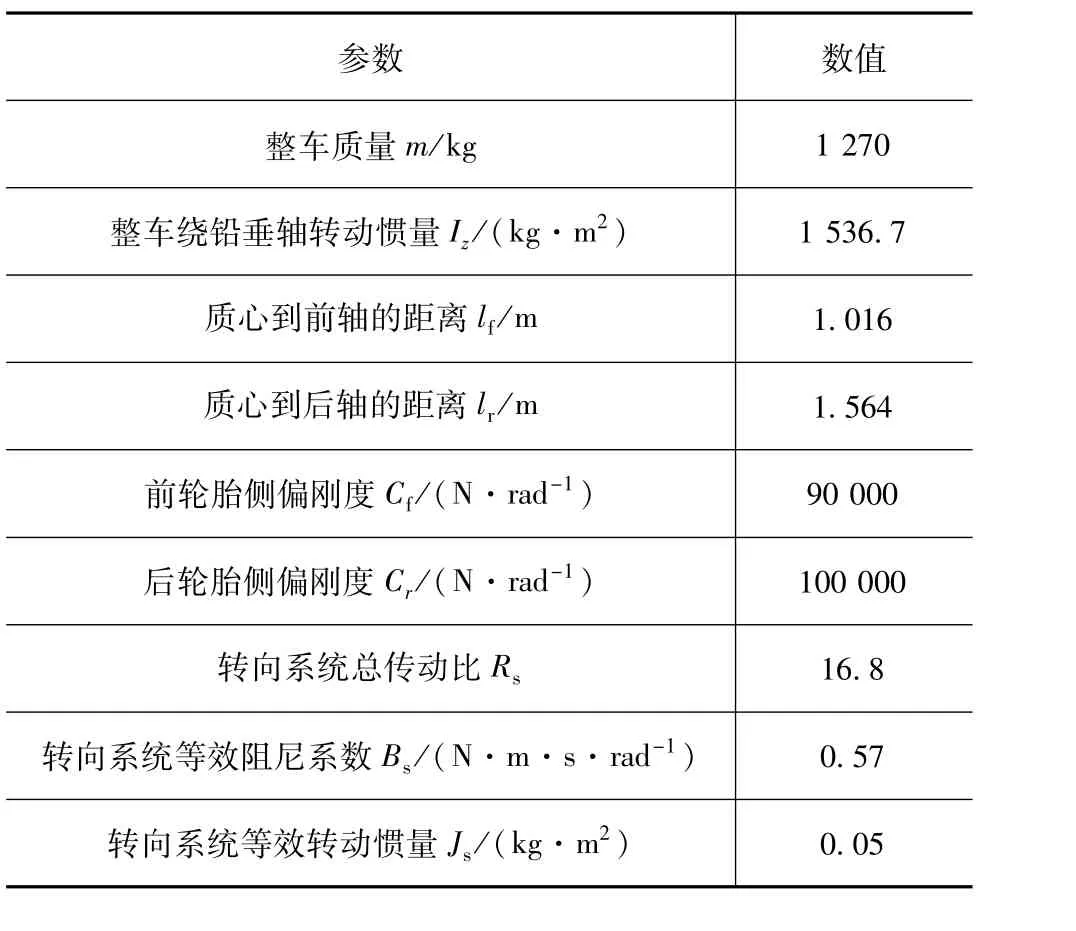
表1 模型参数表
仿真所用驾驶员模型采用预瞄最优曲率模型[15],处于不同状态的驾驶员主要表现为反应时间的差异。一般情况下,驾驶员的神经反应时间td和操作反应时间Th约为0.2和0.1 s,当驾驶员处于异常状态但仍能驾驶车辆时,这个时间要延长3~5倍,且会出现转向不足(因情绪激动导致的激进驾驶也可能表现出转向过度)、误操作的情况。因此,在前述神经网络驾驶员模型基础上改变反应时间并对驾驶员的控制作用进行削弱处理,可得到处于不同状态的驾驶员模型,如表2所示,其中迟钝状态是疲劳状态的进一步加深。

表2 不同状态下的驾驶员
为分析权值分配策略对驾驶员误操作行为的纠正效果,在协调控制下,处于疲劳状态的驾驶员B在第3个弯道入口处反向施加持续2 s的4 N·m误操作转向力矩;处于迟钝状态的驾驶员C在第3个弯道入口处完全脱离驾驶状态;激进型驾驶员D以4 N·m的误操作转向力矩行驶过第3个弯道。不同驾驶员在采用协调控制前后的横向运动控制效果如图3所示。
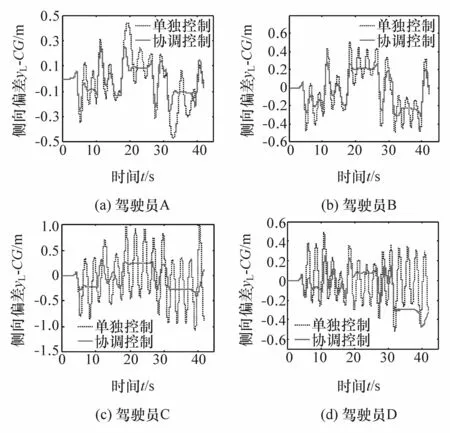
图3 侧向偏差
根据仿真结果对侧向偏差数据进行分析,结果如表3所示。侧向偏差的最大值对行车安全性影响最大,相较于驾驶员单独控制车辆,协调控制明显抑制了车辆的最大偏离程度,并且这一作用随着驾驶员异常状态的加深更加明显。在平均值方面,辅助系统的参与使总体的横向运动控制效果有了明显的提高。此外,当驾驶员单独控制车辆时,会不断调整行进方向,从而车辆距道路中心线的侧向偏差yLCG表现出一定的波动现象;当驾驶员处于异常状态时,这一现象更为明显,而协调控制能大幅平缓车辆的转向行为,使车辆的转向过程平滑稳定。
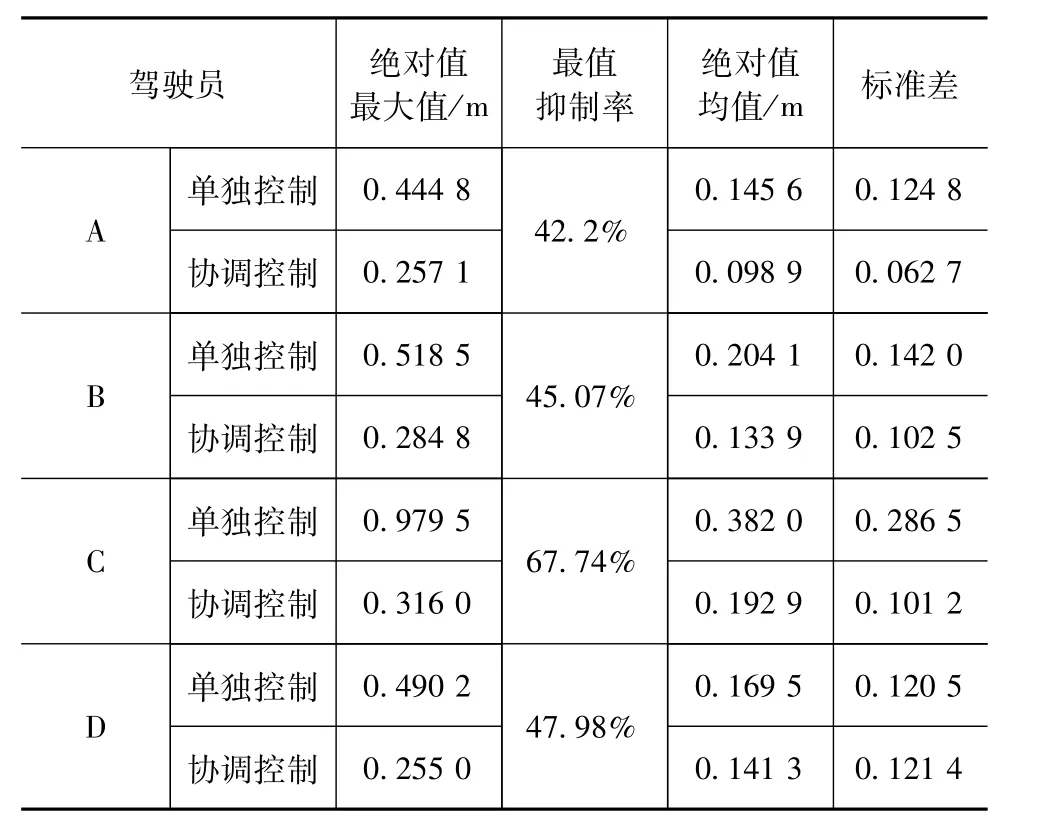
表3 侧向偏差数据分析
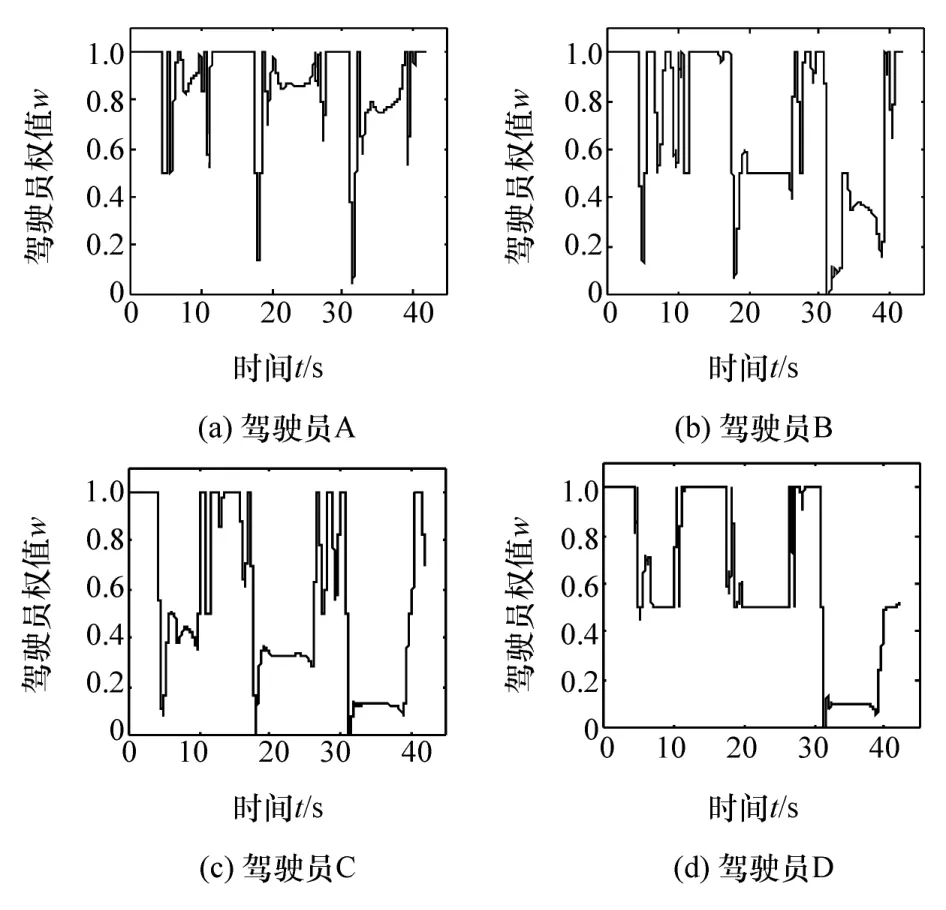
图4 驾驶员权值
图4 为驾驶员的权值变化情况。若认为权值w≥0.5时驾驶员占据主要控制权限,w≥0.8时驾驶员占据绝对控制权限,则驾驶员处于正常状态时,有97.24%的时间享有主要控制权限,有74.98%的时间享有绝对控制权限,同时车辆的最大偏离程度在辅助系统的引导作用下降低了42.2%。当驾驶员处于疲劳或迟钝状态时,驾驶员的控制权值有所降低,但相比于辅助系统仍有更多的控制权限,同时辅助系统介入程度的加深也进一步提高了路径跟踪精度。激进型驾驶员虽然能维持车辆行驶在道路中心线附近,但其反复调整车辆行进方向的现象更为明显,权值分配策略通过触觉引导的作用平缓了其转向操作行为。当驾驶员发生误操作行为时,为保证行车安全,辅助系统会接管转向盘,驾驶员的权值将大幅降低,如图所示均不超过0.2。而相应的,车辆的最大侧向偏差均不超过0.35 m,即权值分配策略通过牺牲驾驶员权值的方式,对其误操作行为进行了有效的纠正。
图5展示了仿真过程中4位驾驶员的转向力矩变化情况,图中Tz通过式(24)计算得出。驾驶员的工作负荷表现在两个方面:一是需要持续施加转矩Td在转向盘上;二是反复调整车辆行驶方向。前者本文中通过驾驶员的转向工作负荷(steering effort of driver,SED)进行衡量,即对Td求定积分获取,如式(25)所示;后者通过转向盘的方向变换次数(number of direction changes,NDC)衡量。只对第3个弯道前的数据进行分析,结果见表4。

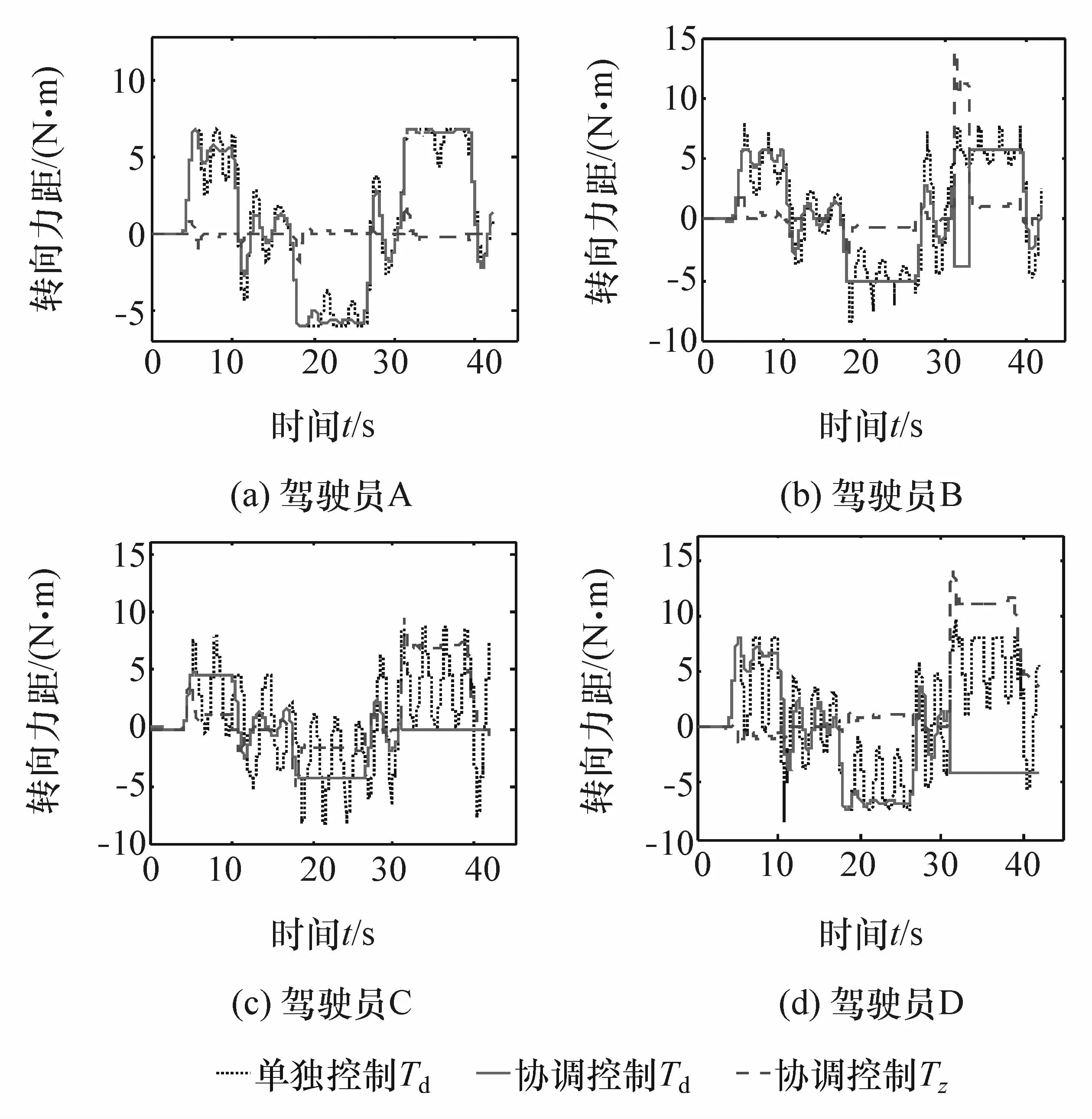
图5 转向力矩对比
由表4可知,辅助系统参与转向控制后,NDC值明显下降,即驾驶员的转向过程更为平滑,由于调整车辆行进方向的行为次数减少而导致其重复工作量大幅降低。在SED上,无论辅助系统参与与否,同一驾驶员施加到转向盘的转矩的大小量级不会有太大改变。因此分析时以驾驶员A单独控制时的SED值为标准,发现驾驶员B、C的SED值分别只有标准值的82.63%和59.58%,驾驶员D由于其具有过度转向倾向,因而其SED值为标准值的124.93%。
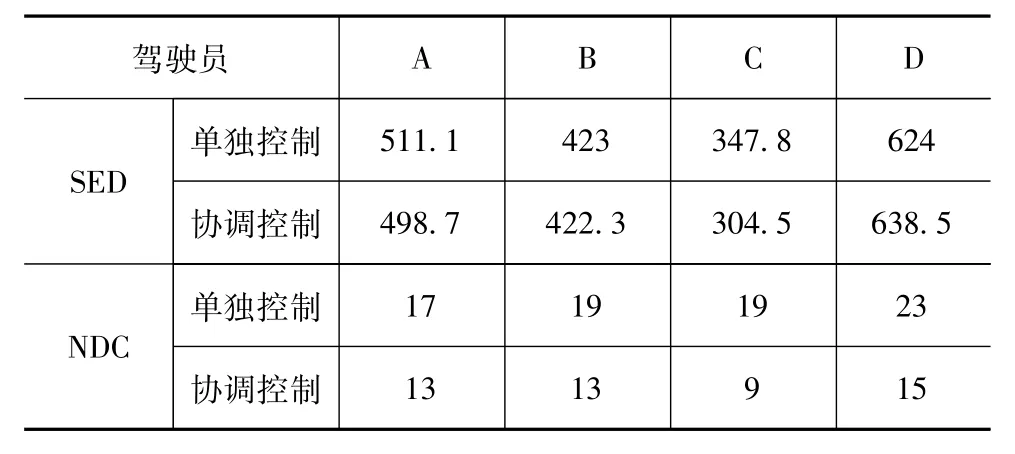
表4 驾驶员工作负荷数据分析
从Tz的角度来看,对于驾驶员A,辅助系统仅在弯道的入口和出口处提供少许的助力力矩,从而抑制车辆的最大侧向偏差。激进型驾驶员D由于仍能维持一定的控制精度,因而Tz同样很小,主要是触觉引导作用。对于驾驶员B和C而言,由于其不能提供足够的转向力矩,所以当车辆偏离一定程度时系统会施加大转矩以纠正车辆的偏离行为,因而在图中表现出一定的“凸起”,从而补足转向力矩不足的部分。
4 硬件在环实验
在实验台上进行硬件在环实验以验证权值分配策略的可行性。实验采用NI PXI主机为工控机,在CarSim中搭建整车模型,在Labview中编写控制程序,通过转矩传感器实时采集驾驶员的转矩信号并经由PXI主机传回Labview。硬件在环实验的具体流程如图6所示。
硬件在环实验分成两部分,采用Alt 3 Road from FHWA仿真道路,路面附着系数为0.8。当驾驶员熟悉了道路及实验台操控后,其以80 km/h的时速单独控制车辆跑完全程。在第二部分实验中加入权值分配策略,且驾驶员相较于第一部分的实验只施加部分转向力矩并在第3个弯道入口处(即27 s时)反向转动转向盘2 s以模拟疲劳状态下的误操作行为。硬件在环的实验结果如图7~图9所示。

图8 转矩对比
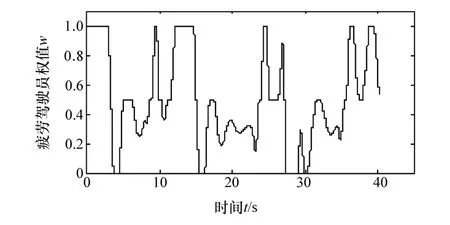
图9 驾驶员权值
图7 展示了实验中的横向运动控制效果。由于每次实验时驾驶员的转向行为不完全相同,因而在权值分配前后,两条曲线在同一时刻的偏差值的对比性较低。从总体上看,驾驶员单独控制时的最大侧向偏离程度为0.689 m,平均侧向偏离程度为0.214 m;权值分配策略参与后且未发生误操作行为时的最大侧向偏离程度为 0.496 m,降低了28.01%,平均侧向偏离程度为0.227 m。可见采用权值分配策略后,处于疲劳状态的驾驶员也能很好地完成驾驶任务,其横向运动控制效果不低于正常状态下单独控制时的效果。车辆在误操作处的侧向偏差为0.72 m,并未偏离车道,可见权值分配策略能有效纠正驾驶员的误操作行为。
图8所示为实验中的转向力矩变化情况。由于辅助系统的引导作用以及提供了部分转向力矩,疲劳状态下驾驶员转矩相较于正常状态有一定程度的下降,其SED值为正常值的84.71%。在NDC上,由图可见,驾驶员调整转向盘的次数也有明显下降,其重复工作量得以有效的降低。
图9展示了实验中的权值变化情况。可见驾驶员在直线路段上对车辆的控制度较高,但在弯曲路段上,为了跟踪道路中心线,避免事故的发生,其权值处于一个相对较低的水平。但总体而言,驾驶员仍有59.61%的时间享有主要控制权限,有39.39%的时间占据绝对控制权限。硬件在环的实验结果与前述仿真分析结果相一致。
5 结论
本文中考虑了驾驶员的输入作用对转向系统的影响,设计了基于MPC的横向运动控制器,分析了不同程度的权值分配对路径跟踪效果和驾驶员主观感受的影响,并基于预期偏移距离设计了权值分配函数。
通过CarSim/Simulink联合仿真和硬件在环实验对协调控制的实验结果进行了对比分析,结果表明:
(1)采用权值分配策略可显著抑制车辆的最大侧向偏移量,提高横向运动控制精度,并且这一作用随着驾驶员异常状态的加深更加明显;
(2)正常驾驶员和具有过度转向倾向的激进型驾驶员由于仍能维持车辆的侧向位置,因而权值分配的作用主要在于通过触觉引导平滑车辆的转向控制行为,减少驾驶员反复调整车辆行进方向的次数,降低驾驶员在转向任务中的重复工作量,辅助系统很少干涉驾驶员的操作行为;
(3)对于疲劳驾驶员,权值分配策略除了上述作用外,还可在一定程度上降低驾驶员施加的转向力矩Td,从而降低其工作负荷,但为了保证行车安全,辅助系统的权值也有相应的提高;
(4)对于驾驶员的误操作行为,权值分配策略具有很强的容错能力,可以及时纠正车辆因误操作而出现的偏离现象。
由于个体间差异和存在驾驶员改变操作意图的可能,将驾驶员的个体习惯及人机权限切换纳入协调控制策略的问题仍有待进一步研究。
