可换电动机的机械臂关节
2020-05-08李胤镔罗炳任牙举辉邝禹聪
李胤镔, 罗炳任, 牙举辉, 邝禹聪
(华南理工大学 广州学院,广州510800)
0 引 言
随着机械臂的应用越来越广泛,机械臂的种类也分成工业级的和桌面式的。机械臂不但可以代替人手做重复性的工作,还可以代替人类做危险的工作,大大地帮助人类解放双手,而且还保证了绝大部分工作的安全。机械臂的运用不但可以节省人力,还可以节省时间。然而现在的机械臂关节还处在固定电动机的形式上,无法更换电动机,当想使用其他类型的电动机来控制时,就要重新买一套机械臂的关节,这不但增加了更多的成本,还很占用资源。如果有一款机械臂关节可以换电动机,就可以减少资金上的花费,还能根据情况进行调节更换电动机。例如当需要精度时,就可以换上步进电动机,当需要速度时,就可以换上直流电动机,甚至还能直流电动机与步进电动机结合,达到更好的操作效果,这样就可以在成本上减少消耗,还能得到更广泛的使用,以充分地发挥机械臂关节的作用。所以机械臂关节的电动机更换是本文的研究重点。
1 机械臂关节的工作流程
首先由单片机发送指令给电动机,电动机带动主动轮转动,通过主动轮带动从动轮转动。由于从动轮跟轴相连接,轴带动减速器里的太阳轮转动,太阳轮转动时,带动行星轮转动,行星轮转动时,带动行星架盖转动,最后由行星架盖的4个孔位带动另一个机械臂关节转动。当想更换电动机的时候,就可以打开机械臂侧壁的一片外盖,然后更换电动机,在电动机轴上装上齿轮,然后合上外盖,就可以继续使用了。
2 机械臂关节的工作原理
电动机上的主动齿轮带动减速器轴上的从动齿轮转动时,因为齿轮大小和齿数相同,可以达到等效传动。当轴接收到动力后就会传动到太阳轮上,太阳轮与齿圈夹着3个行星轮,3个行星轮以等边三角形放置,让太阳轮不会产生某个方向的额外作用力。当太阳轮转动时,又会带动着3个行星轮转动,而行星轮又分2个齿轮部分,分别位于上下两端,当下齿轮转动时,上齿轮也被带动,由于上齿轮与下齿轮的齿数不同,因此产生速度差,从而达到减速的效果。上齿轮转动时,就会带动着行星架盖转动,而行星架盖上有4个孔位,用于与另一个机械臂关节结合限位,这样就可以利用4个孔位来带动另一个机械臂关节转动了。
3 机械臂关节的结构介绍
3.1 机械臂关节的外壳
机械臂关节由外壳为基础,圆筒形的外壳(如图1)可以大幅度地减少空间的占用,也可以减少材料的消耗,如果设计为方形外壳的话,不但边角可能会对人造成割伤,还很消耗材料。在圆筒内部的中间偏下处有一个平面,上面有4个孔,用于减速器与圆筒外壳相互固定。同时在减速器两端有8个孔,用于与其他机械臂关节连接,在外壳侧壁有一大片圆弧形开口为电动机更换装置的放置位置。
3.2 电动机更换装置
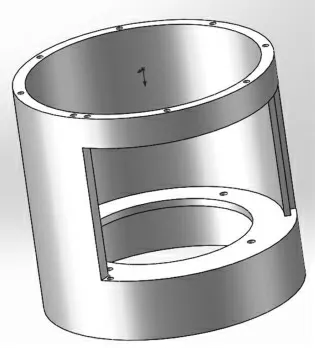
图1 机械臂关节的外壳
电动机的更换意味着一个装置要同时适应多种电动机,但是不同的电动机,不但转轴大小不一,而且电动机本身大小也不一样。于是采用了左轮手枪的设计思路,通过打开一边的盖子,把换子弹的原理运用在更换电动机上。而不同的电动机之间都有一个共同点,螺丝孔都在电动机的前方,针对电动机的孔距不同设计了孔槽,孔槽的摆放角度不同,所拥有的功能也不同,比如横孔槽一般用于平行移动物体所用,如竖孔槽可用于不同电动机的孔距大小的配合。但这样容易在电动机转动时,使螺丝对这孔槽上的一个点以垂直的力进行压迫,容易产生形变,所以在设计中采用了斜孔槽。斜孔槽是竖孔槽倾斜一定角度所得,它可以分散螺丝对孔槽的作用力,而且也不影响对电动机孔位距离不同的配合。
现在的电动机孔位多为步进电动机的正方形4个孔和直流电动机的六孔式和两孔式,所以孔的设计就根据了6个孔和4个孔的位置来设计,但由于机械臂中不同部位的机械臂关节大小是不一样的,所以电动机更换装置上的孔距上限和下限都有所不同,所以就以其中一个机械臂关节的电动机更换装置为例进行说明。此款电动机更换装置上所承载的电动机对角孔距上限为60 mm,下限为30 mm,而市面的步进电动机如图4所示,其对角孔距为43 mm,这样就可以放进电动机更换装置里的孔槽的中间位置左右。直流电动机如图5所示,其直径为φ31 mm,6个孔之间为60°均布,所以适合电动机更换装置中的六孔型孔槽。这样就可以达到更换电动机的效果。因为步进电动机的前面还有一圈小凸台,所以在中间还要预留了可以放进小凸台的孔。
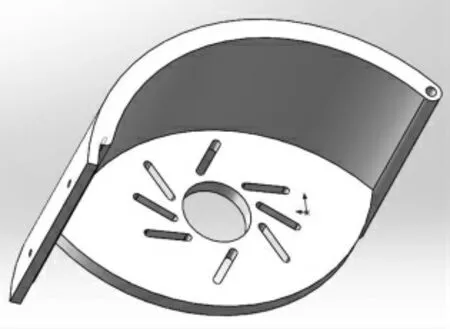
图2 电动机更换装置

图3 孔位
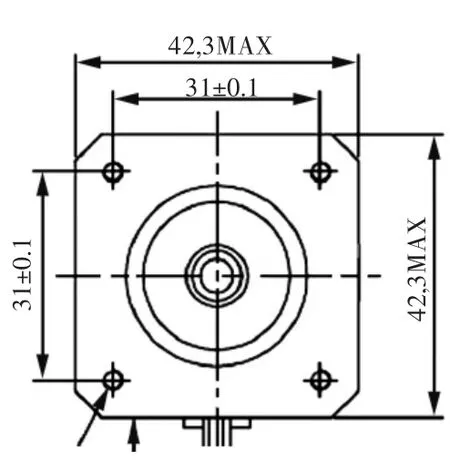
图4 步进电动机底孔
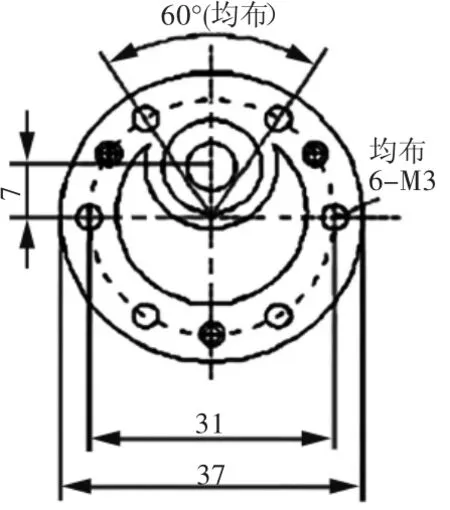
图5 直流电动机底孔
承载电动机需要一个平台,在计算了某个部位所能使用的步进电动机和直流电动机的直径后,对比机械臂的外壳半径,得出以机械臂外壳的圆心为平台圆边的顶点,再以图2中的机械臂关节的1/3侧壁的中心点为圆心,作出一个平台,当把电动机装上后,在电动机的轴上固定上1个齿轮,由电动机带动着这个齿轮,再带动减速器上的齿轮,从而完成后续传动。
3.3 机械臂关节的减速器
在减速器的不同种类中,行星轮减速器(如图6)具有体积小、精度高、工作稳定的特点。主要由轴、行星架、太阳轮、行星轮、内齿圈组成,太阳轮为主动件,行星轮为从动件。当电动机带动轴转动后,轴带动着太阳轮转动,然后通过行星轮下半部分与太阳轮和内齿圈的齿轮啮合进行减速传动,行星轮上半部分与行星架盖进行传动输出,最后由行星轮盖上的4个孔位进行限位输出,实现整个减速器的减速传动。减速器的减速差可以通过齿数进行调控,齿轮的传动公式是:传动比=从动轮齿数/主动轮齿数。
4 机械臂关节的整体结构
如图7所示,通过拆卸机械臂关节侧壁上的螺丝,使其侧壁打开,通过拧螺丝的方式更换电动机,把齿轮固定在电动机轴上,使其与减速器轴上的齿轮啮合即可完成电动机的更换。
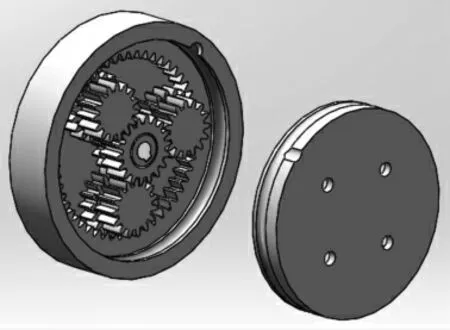
图6 行星轮减速器

图7 机械臂关节整体模块
5 结 语
本文介绍的是一款可以适用于多个场合的机械臂关节,通过更换电动机用于各个场合,在机械臂操作过程中,需要速度而不需要太高精度时,就可以都换上直流电动机,当需要精度而不太需要速度时,就可以都换上步进电动机,当精度与速度都需要时,就可以一部分机械臂关节换上直流电动机,一部分机械臂关节换上步进电动机。既方便后续的操作,还节省了买多个不同电动机机械臂关节的成本。