动态无线充电在智能巡检机器人中的应用
2020-05-08卢英建鲁芷鑫
卢英建,鲁芷鑫
动态无线充电在智能巡检机器人中的应用
卢英建,鲁芷鑫
(武汉理工大学 信息工程学院,湖北 武汉 430070)
随着无线充电技术在小功率产品上的使用越来越成熟,巡检机器人等中、大功率设备无线充电技术的应用前景也越来越受到人们的重视。为解决巡检机器人当前静态无线充电方式的弊端,提出一种动态无线充电在智能巡检机器人中的应用系统。在该应用系统中选取感应耦合的电能传输方式,采用高频高压配电-低压恒流激励的导轨模式。控制器通过对系统各节点电压、电流等参数的实时监控判断出系统当前的运行状态并调整输出参数,从而给巡检机器人进行动态、稳定供电。
无线充电;分段导轨;巡检机器人;充电臂
1 概述
1.1 目前巡检机器人的充电方式
目前巡检机器人的充电方式主要分为有线充电和无线充电两种。而无线充电方式中多为固定地点充电,控制系统通过监控机器人蓄电池的电压,确定当前是否需要充电。当检测到欠压时,机器人自主导航回到充电房附近,同时使用激光测距仪和视觉识别的方式,实现对充电座的定位,通过调整机器人位姿或控制充电臂,实现机器人的充电[1]。
1.2 当前充电方式存在的问题
对于现有的有线充电方式来说,外露的充电接口容易出现老化,所以安全性较差,而且只能在固定的充电地点进行充电。对于目前的静态无线充电方式来说,充电的过程同样需要到固定的充电桩才能完成充电,所以浪费了大量的时间,降低了续航能力,工作的巡检机器人的工作效率也因此大打折扣。同时,无论是传统的有线充电方式还是现有的静态无线充电方式,巡检机器人都需搭载一定数量的电池组,如果追求高续航能力就会增加自身设备重量,从而增加了能量损耗。
1.3 无线充电的优势
相比于传统的有线充电方式,无线充电方案是将发射线圈埋入地下,不占据地上空间且无外漏接口,具有运行安全、便捷灵活、维护成本低、用户体验好等优点[2]。而相比于具有固定充电地点的静态无线充电方式,动态无线充电可以不受限于充电的地点,在设备工作的过程中即可完成供电,提高设备的工作效率。同时,动态无线充电方式可以通过减少车载电池的搭载量实现设备的减重,从而进一步降低能量损耗,提升设备行驶里程[3]。
2 方案设计
2.1 感应耦合电能传输
感应耦合电能传输方式是利用电磁感应原理来实现的,其结构如图1所示。装置的基本构成为4部分:初级能量变换机构、能量传输机构、次级能量拾取机构和反馈机构[3]。电网电压作为初级能量变换机构的输入电压,经过整流桥进行整流和高频逆变,先将电网中的工频交流电转换为直流电,然后经过高频逆变电路将直流电转换为高频交流电。能量传输机构等同于松耦合变压器。原边线圈通过交变磁场的作用,将电能传输到副边线圈。能量拾取机构为松耦合变压器的副边线圈,将接收到的高频交流电通过整流、稳压,从而转换为直流电,给后级负载稳定地供电,在巡检机器人中,负载为蓄电池和其他耗能装置。反馈机构对各参数进行采样,把采集到的信号反馈给控制调节单元,从而控制输出的驱动信号频率。
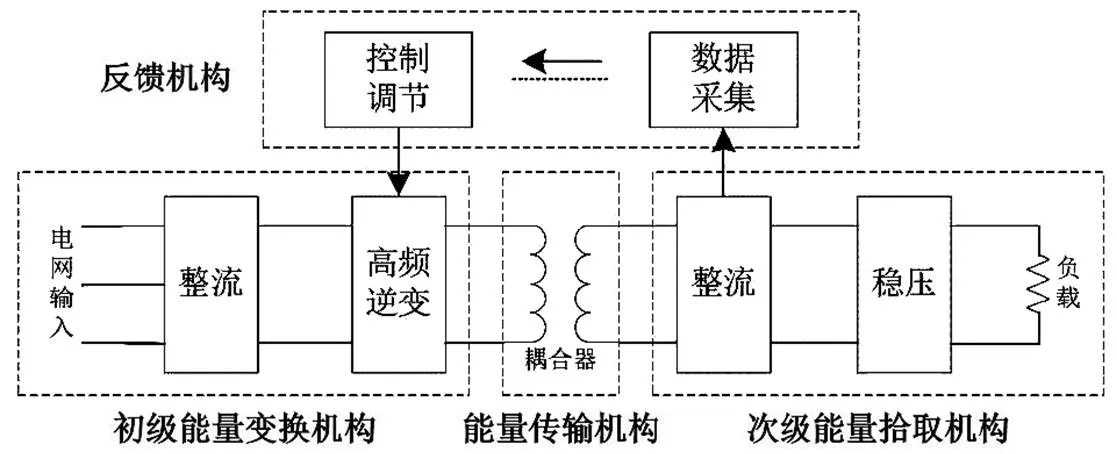
图1 感应耦合传输装置结构图
2.2 分段供电导轨模式
本系统采用高频高压配电-低压恒流激励的分段导轨模式,能量传递引导件被划分为N段,并且每个分段都配置有转换器和谐振补偿网络。
分段供电导轨模式的结构如图2所示。工频电源经过功率转换装置转换为高频的交流电,由高频升压器进行升压,然后注入配电轨进行传输(高频和高压配电);每个导轨部分都配备有高频降压转换器,用于将配电导轨中的高频高压交流电转换为低压大电流交流电,然后将其传输到后续的换向和补偿链路。

图2 高频高压配电-低压恒流激励导轨结构图
除能流的开关控制外,转换器还具有恒定电流控制作用,从而在励磁引导件中产生更大的恒定励磁电流(低压恒流励磁),增强了励磁导轨的功率发射能力,确保了功率传递的稳定性。
3 系统硬件设计
3.1 控制器
本系统采用TI公司生产的MSP430作为控制器,其内部有2个16位定时器,而且可以实现定时开关中断、输出高频PWM信号、输入捕捉等功能。
该器件可为逆变器电路提供高频PWM和SPWM驱动信号。选择该处理器作为系统主控制器的主要原因是其低电压启动和超低功耗。它的启动电压低至1.8 V,在正常工作模式下仅需要230 μA电流。在待机模式下,工作电流低于0.5 μA,这大大降低了控制器带来的能耗,并增强了系统的耐用性。
3.2 DC-AC逆变电路
DC-AC逆变电路是AC-DC-AC变换方式的重要环节,在初级能量变换机构中,需要将整流、滤波后的直流电压转换为高频交流电压。
3.2.1 选型依据
全桥式逆变电路相对于半桥式电路具有开关管承受的电压低、传输功率高、可以直接通过能量注入控制策略和移相控制实现对输出功率的调节、可以自由选择谐振补偿方式等优点。由于动态无线充电系统在巡检机器人的应用中要求的传输功率较大,因此本系统选用了全桥式逆变器的电路结构。
3.2.2 电路结构
全桥逆变电路主要分为单极性和双极性两种控制方式。单极性控制方式下的全桥逆变器在工作时,其过0点会有一个较大的振荡,影响输出高频交流电的质量;而双极性控制方式是规定对角的一对MOS管为同步性开关,而同一桥臂的上下管之间为互补性开关。双极性控制方式相对于单极性来说控制相对简单,因此本系统的逆变电路选用双极性的控制方式。
全桥逆变电路的主电路拓扑由4个功率MOS管和多个电阻、二极管组成,其具体结构如图3所示。MSP430控制器产生的高速PWM波由驱动器进行功率放大,然后接入MOS管的栅极,从而控制两个桥臂上MOS管的导通与关断。当控制器输出有一定占空比变化规律的SPWM波时,即可将输入的直流电压变换为具有一定频率且波形成正弦变化的交流电压。

图3 全桥逆变电路结构图
3.2.3 控制方式
全桥逆变电路一般采用SPWM波的控制方法,而SPWM又分为单极性与双极性两种控制方式。在本系统的逆变电路中选取单极性SPWM控制方式。
在每半个周期内,同一桥臂的两个MOS管中,只有一个MOS管按脉冲系列的规律来进行开通与关断工作,另一个则完全截止;而在另外半个周期内,两个MOS管的工作状况则恰好相反[4]。在此工作状态下,流经发射线圈的则为正负变化的交变电流。
3.3 整流电路
整流电路的功能是将接收线圈中的交流电变换成为可给设备供电的直流电。整流电路的输出为脉动的直流电,在电路后方接入一个大容量的极性电容进行滤波,从而得到一个相对平缓的直流电压。
整流电路采用常见的桥式整流电路,由4个功率二极管组成。4个二极管两两对接。正弦波的正半部分输入时2个二级管导通,输出为正;正弦波的负半部分输入时,另外2个二级管导通,由于二者是反接的,所以输出还是得到正弦波的正半部分。桥式整流器相对于半波整流对输入正弦波的利用效率高1倍,具有比较好的适用性。
3.4 DC-DC稳压电路
3.4.1 选型依据
系统接收线圈输出的电压值相对较低,需要通过提高电压值才能给后级负载端供电。考虑到系统效率以及稳定性,选用以BOOST电路拓扑为基础的升压电路作为整流电路后的稳压电路。
BOOST升压电路通过控制器产生的高速PWM波来控制开关管的通断。该电路可根据供电的不同状态在恒压模式和恒流模式中切换。例如在给机器人的蓄电池充电时首先进行恒流充电;在充电一段时间后,当监测到电池电压达到一定的安全阈值时即切换为恒压模式,降低充电电流,使电池的电压不会超过规定的安全范围,从而在保证充电效率的同时保护电池,延长电池使用寿命。
3.4.2 电路结构
BOOST升压电路的主电路拓扑主要由2个功率MOS管和1个功率电感组成,其具体结构如图4所示。同全桥逆变电路中的控制MOS管开关的方式一样,2个开关管的开启与关断也是由接入到栅极的PWM信号来控制的。
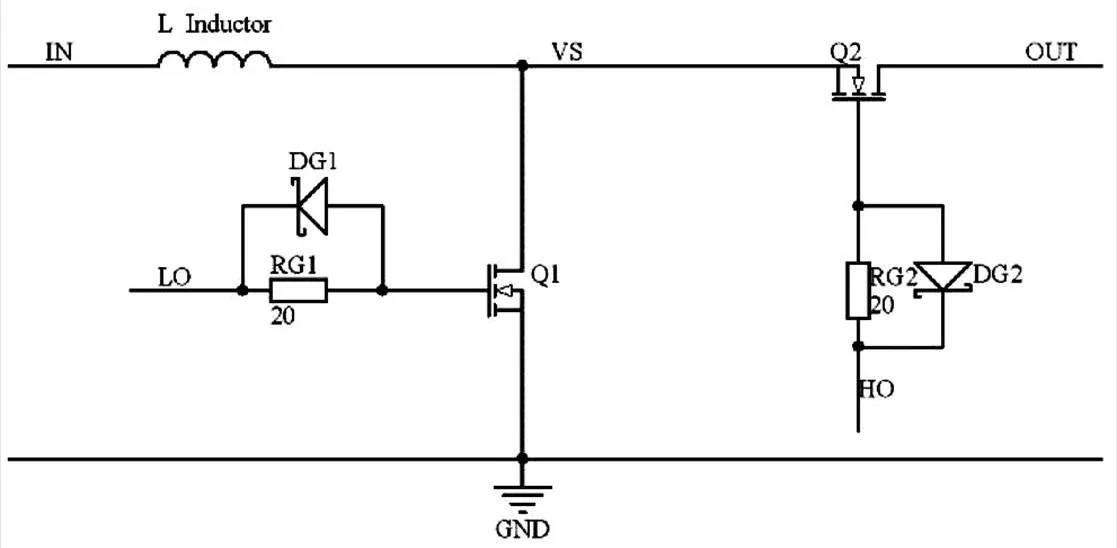
图4 BOOST升压电路结构图
在BOOST电路中,控制上下两个MOS管开关的PWM信号的占空比为互补关系,即任意时刻一个MOS管为开启状态、另一个为关断状态。控制器根据当前电路状态调整两路PWM信号的占空比,从而实现调节输出电压的大小。同时控制器通过对输出电压和电流的实时监测来调整PWM信号,实现恒压供电模式、恒流供电模式以及二者之间的转换。
4 系统程序设计
4.1 发射端控制器
发射端控制器的主要功能是控制全桥逆变器将直流电压转换为高频的交流电压。根据全桥逆变器的电路结构可知,发射端控制器需要输出SPWM波来控制4个功率MOS管,实现电压的变换。
在本系统中SPWM波的产生方式是查表法。把半周期正弦波在时间轴上等分成多份,这些部分的面积为先增大再减小的趋势变化,面积呈对称分布;如果每一部分使用面积对应相等、等宽但不等幅的矩形脉冲来代替,则这些脉冲的幅度就会呈现先增高再降低的趋势,脉冲高度两边对称。如果被等分的正弦波与横轴所围成的区域用面积对应相等,等幅且不等宽的矩形脉冲来代替,则这一系列脉冲的宽度就会依次呈现出先变宽后变窄、宽度两边对称的有规律的变化。
4.2 接收端控制器
MSP430控制器可通过ADC采样采集电压信号。在BOOST升压电路输出端的电压和电流采集电路可以将输出端的电压值和电流值变换为控制器ADC可采集的电压信号。控制器通对该电压信号进行实时采集,通过一定的计算即可得到当前BOOST电路输出端的电压值和电流值。
在恒压供电的方式下,控制器会判断当前电压值是否等于设定值(例如在给蓄电池充电时,该电压设定值为电池的安全电压阈值),如果二者不相等,则使用PID运算改变控制器输出PWM信号的占空比大小,从而改变电路的输出电压值,直至其实际值与设定值相等。
在恒流供电的方式下,与恒压控制方式类似,控制器会判断当前输出端电流值是否等于设定值(例如在给蓄电池充电时,该电流设定值为电池的安全充电电流)。如果二者不相等,则通过PID运算改变输出PWM信号的占空比大小,从而调节输出电压值的大小,通过这种方式来维持充电电流的恒定,直至监测到电压达到安全阈值,切换到恒压供电 模式。
5 结束语
本文描述了动态无线充电在智能巡检机器人中的一种应用,在一般无线充电方式的基础上引入分段导轨模式,从而实现动态无线充电。本文所描述的应用可以使巡检机器人脱离固定的充电桩,在工作过程中即可不断供电,从而提高巡检机器人的工作效率,对实际的生产活动具有一定的积极意义。
[1]黄山,吴振升,任志刚,等.电力智能巡检机器人研究综述[J].电测与仪表,2020(2):26-38.
[2]赵争鸣,刘方,陈凯楠.电动汽车无线充电技术研究综述[J].电工技术学报,2016,31(20):30-40.
[3]白啸东.电动汽车动态无线充电系统的设计与实现[D].天津:天津工业大学,2018.
[4]喻衍.一体化三相逆变陀螺电源的设计研究[D].天津:天津大学,2007.
TP242
A
10.15913/j.cnki.kjycx.2020.08.070
2095-6835(2020)08-0157-03
卢英建(1999—),男,通信工程专业本科在读。鲁芷鑫(1999—),男,电气工程专业本科在读。
〔编辑:张思楠〕