接触轨非接触检测系统设计与研究
2020-04-29柴晓冬郑树彬李立明
封 硕, 柴晓冬, 郑树彬, 李立明
(上海工程技术大学 城市轨道交通学院, 上海 201620)
0 引 言
随着中国城市人口的膨胀,轨道交通路网规模不断扩大,地铁已成为城市居民的首选交通工具。如今越来越多的城市地铁系统开始采用接触轨供电的方式[1]。与接触网供电相比,接触轨受流方式具有结构简单、安装简便、架设成本低、抗自然灾害能力强、稳定性好等特点。由于地铁站之间的距离普遍较长,手动检测工器具性能落后,同时也存在检测点少、密度低的问题[2],都不利于接触轨的维护管理。为了解决当前接触轨检测存在的问题,本文提出采用光电结合技术的接触轨非接触检测系统。
1 接触轨非接触检测系统总体方案设计
随着轨道检测技术发展以及计算机视觉测量技术的进步,本接触轨非接触检测系统通过便携式检测车配合现代检测设备进行同步动态、静态检测,搭建检测系统硬件平台,通过传感器获取接触轨拉出值、导高值参数实现非接触检测。摄像系统在照明光源系统的辅助下,拍摄高分辨率的接触轨、周边设备、零部件的图像并对其进行实时监控,通过计算机进行实时显示,为轨道工作者实时观察和判断设备状态提供方便[3-4]。此系统主要包括便携式检测车与检测臂结构系统,便携式检测车可以伸缩折叠,方便工作人员运输与携带,机械臂结构起到便携式检测车与接触轨检测装置的连接作用;不同类型的传感器安装在特定结构中,在复杂环境情况下完成接触轨检测任务,整个接触轨检测系统由便携式检测车、检测臂结构、工业红外高清摄像机、距离传感器等组成。本文以下接触式展开研究,接触轨非接触检测系统如图1所示,接触轨非接触检测原理如图2所示。
2 非接触检测系统测量原理与算法
2.1拉出值与导高值定义
定义1 接触轨拉出值接触轨顶面的中心位置到走行轨顶面中心位置的横向水平距离;
定义2 接触轨导高值接触轨顶面中心位置到走行轨轨面中心位置连线的垂直距离。
接触轨拉出值与导高值出现偏差可以反映出接触轨几何状态出现偏差,会影响机车运行,留下安全隐患;严重时会与集电靴碰撞在一起,造成伤害。所以,有必要对接触轨拉出值、导高值进行检测研究[5]。
2.2 拉出值检测原理和算法
理想位置情况如图1、图2所示。距离传感器1与距离传感器2向走行轨内侧面发出光源射线,距离传感器1到距离传感器2的距离为c,距离传感器1的测距值为a,距离传感器2的测距值为b,距离传感器1发出的激光,与水平面夹角为α,距离传感器2发出的激光,与水平面夹角为β,钢轨宽度为W,接触轨中心面到走行轨左侧面距离为M,则轨距的表达式为:
L1=acosα-bcosβ+c,
(1)
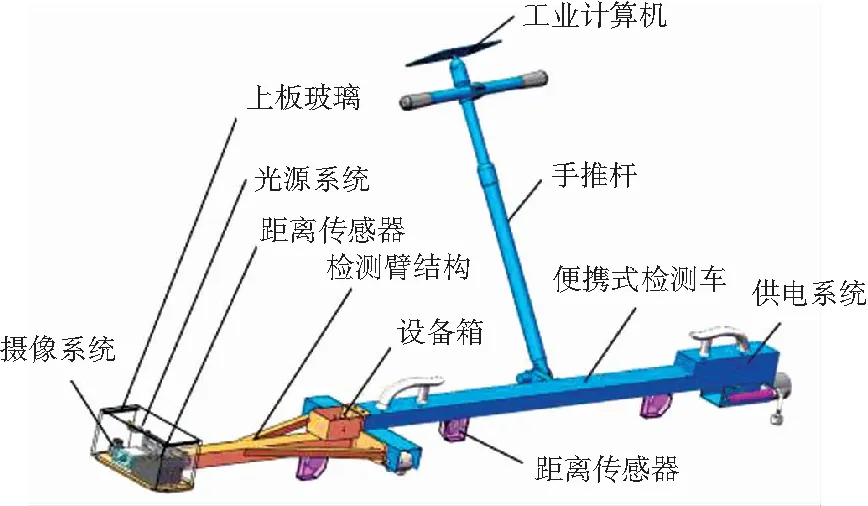
图1 检测系统的基本结构
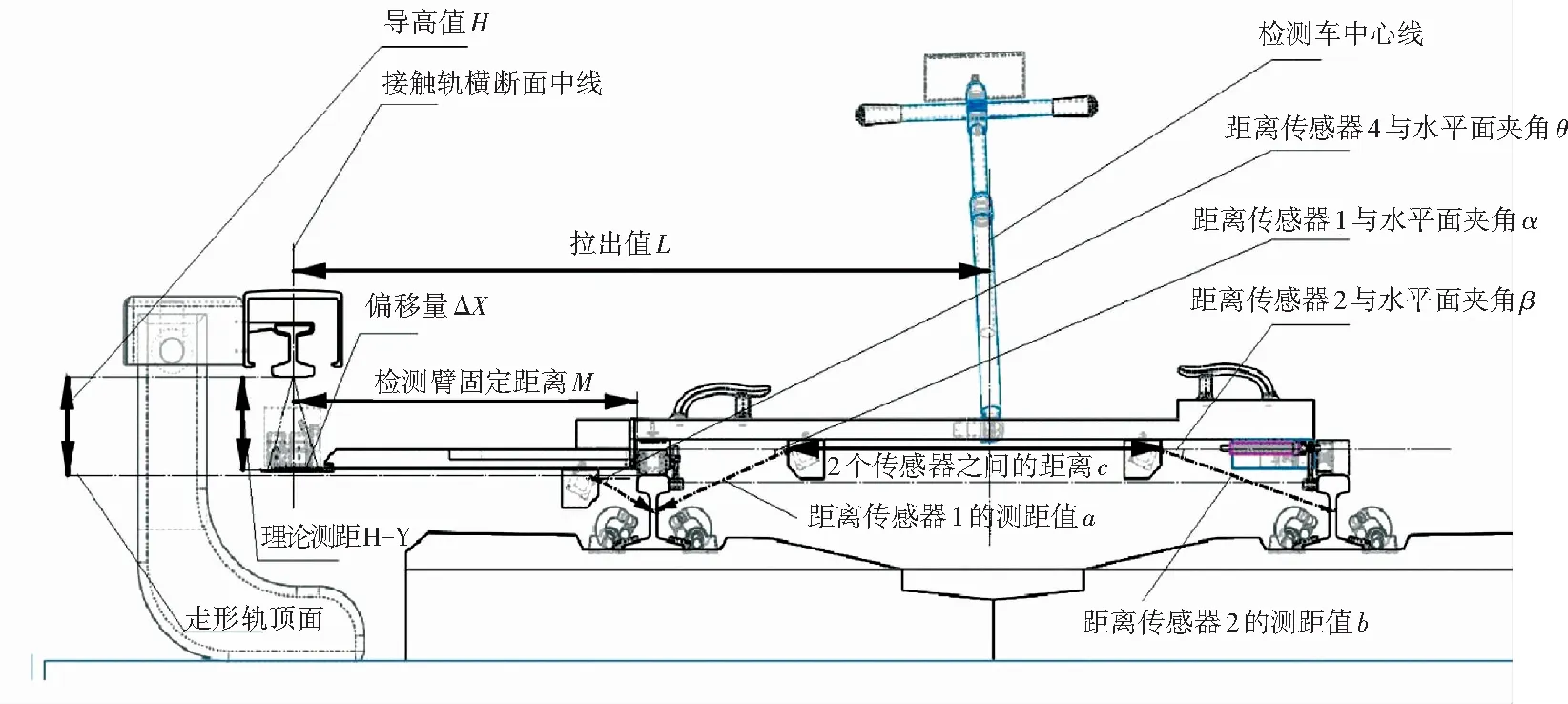
图2 非接触检测原理示意图
Fig. 2 Schematic diagram of non-contact detection
距离传感器的安装位置与安装角度确定以后,其发出的激光与水平面的夹角也随之确定。则拉出值可以表示为:
(2)
2.3 接触轨导高值检测原理和算法
当接触轨的几何参数发生变化,距离传感器测距值a、b也会随之变化,可以计算出接触轨的拉出值[6]。
如图2所示,距离传感器3的测量值为d,距离传感器3到走行轨轨面的距离为Y,理想状态下,距离传感器3发出的激光与水平面垂直,但是考虑到检测臂左右波动的情况(向左偏移为正),将引起距离传感器3的输出值在水平方向发生ΔX的偏移,则导高值可以表示为:
(3)
如图3所示,距离传感器4安装在检测臂的A点位置,向走行轨外侧面发出光源照射,距离传感器4的安装位确定,则传感器与水平面的夹角θ,理论测量值AD确定,AD距离用S理论表示,可以通过标准量具测量与简单计算求得。考虑检测设备的搭载车辆在实际检测过程中,会出现横向的偏移(向左偏移为正),ΔX会发生向左或者向右的偏移量,得到图3中B、C点位置,BE、CF可以表示距离传感器4的实际测量值,用S测量表示。
通过几何理论知识的计算,ΔX可以表示为:
(4)
综上所述,可以计算出导高值:
(5)

图3 检测产生的偏移量
3 非接触检测系统的结构设计
接触轨非接触检测系统结构设计,需要满足摄像系统、光源系统、传感器到接触轨最大设计距离小于200 mm, 接触轨竖直中线到走行轨内侧面的水平距离为832.5 mm,整体结构采用拼焊栓接形式[7]。要求该结构可以在恶劣天气、复杂环境进行非接触检测工作,并将检测到的数据实时输送回数据库进行对比判别,提高检测效率与精度。集成设备箱中包括摄像系统、光源系统和传感器的安装,机械臂连接车体与集成设备箱,重点进行便携式检测车与检测臂结构设计。
3.1 便携式检测车的设计
便携式检测车可以通过旋转装置折叠,收起前呈“T”字型,如图4、图5所示,分别为便携式检测车的工作状态和折叠状态。
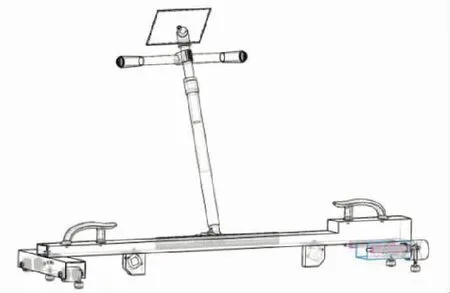
图4 便携式检测车工作状态

图5 便携式检测车折叠状态
检测车收起后旋转臂可以和主梁旋转到同一个方向,体积小,重量轻,便于携带。整体材料选用方铝管,结构可靠,方铝管内部中空可以用来穿线,有利于对布线进行保护。左侧搭载的机械臂结构与最右侧电源和车体在重量上保持平衡。在主梁的中间部位加一根500 mm的铝型材,可以对主梁支架起到加固的作用,同时应对复杂的轨道环境,手推杆可以在加装铝型材的区域滑动,选择最佳行走路线[8]。该便携式轨检车共有3个走行轮和4个定位轮装置,如图4所示。图4中,右侧的定位轮与弹簧装置相连,如图5所示。另外2个定位轮固定在旋转臂上,定位轮装置可以使检测车在轨道上稳定前行,减小检测车的左右偏移误差。
3.2 机械臂结构的设计
机械臂结构通过螺栓与便携式检测车进行连接。搭载2个设备箱,前端为集成检测设备箱,后端为交换机等连接设备。整体材料选用方铝管,同样是为了保护进线而且结构美观可靠。机械臂结构承载了几乎整个接触轨检测系统的硬件安装,不但可以搭载在便携式轨检车低速检测,还可与快速巡检车互联互通。在机械臂结构两侧垂直面安装加强筋,提高结构强度[9]。机械臂的右侧是与车体的连接设计,左侧通过螺栓与设备盘连接,设备盘用来搭载集成设备箱。
4 接触轨检测系统的强度分析与有限元分析
4.1 机械臂系统与车身连接的强度分析
机械臂结构和设备集成箱的总重量约30 Kg,空气阻力P忽略不计,当机械臂安装在快速巡检车上进行接触轨检测,冲击加速度是重力加速度的10倍左右,机械臂系统和车身框架之间的最大作用力为:
ΣFmax=M×10g=3000 N,
(6)
选择12.9级M20螺栓,总共2个,因此每个螺栓的最大工作剪切力为1 500 N。
螺栓杆与固定支座的挤压强度为:
(7)
螺栓杆的固定支座的剪切强度为:
(8)
其中,F表示螺栓的工作剪力;d表示螺栓剪切面直径;Lmin表示孔壁挤压面的最小厚度。
许用切应力安全系数Sτ、许用挤压应力安全系数Sp均取6.8,得出螺栓的许用切应力和许用挤压应力均为137 MPa,所以螺栓强度满足要求。
4.2 机械臂结构与设备盘连接强度分析
设备盘和设备集成箱质量大概15 kg,受到冲击加速度的影响,机械臂结构和设备盘之间的作用力为1 500 N,设计6个螺栓进行连接,每个最大承受力250 N,双头螺栓杆拉伸强度为:
(9)
其中,F表示螺栓的工作剪力,d表示双头螺栓直径。
螺栓屈服强度为785 MPa,对比可得出结论:拉伸强度远远小于屈服强度,选用的螺栓强度符合要求。
4.3 机械臂结构的有限元分析
机械臂结构是整个接触轨检测结构设计中最重要的一部分,不但是车体与集成设备箱的过渡连接装置,而且承载几乎整个接触轨检测系统的硬件安装,研究认为由接触轨检测系统和机械臂结构组成一个机械臂系统。通过简单的改造,机械臂系统可以安装在不同的轨检车上进行接触轨检测,为接触轨检测系统大范围普及应用创造有利条件[10-13]。
将模型简化导入Workbench中,模型主要包括机械臂横梁和设备盘,加载Q345E材料,网格划分采用自动网格划分,划分设计效果见图6,可以满足分析的需要。利用meshing模块最终得到5 037个单元,12 097个节点,对于检测臂系统整体结构,主要重量集中在设备盘上,集成设备箱的重量大约15 kg,其它的零部件比如距离传感器相对于整个机械臂重量较小,可以通过质量与接触面积换算成梁体上承受的压力。

图6 机械臂结构网格划分图
图7和图8分别是工作载荷下检测臂结构的应变、应力云图。由图7可知,在静态载荷的作用下,变形主要从设备盘一侧向检测车一侧逐渐增大,根据图7中数据,最大等效变形量为0.000 4 mm左右,变形量在可接受的范围内。根据图8可以发现最大等效应力为85.04 MPa,应力主要分布在图中检测臂的右侧,与实际相符,满足设计要求。

图7 机械臂结构应变云图

图8 机械臂结构应力云图
5 实验验证与分析
接触轨与走行轨空间形位参数关系影响机车的供电效率。 检测接触轨相对于相同侧行进轨的横向和纵向位置关系可确保轨道交通的安全运行。上海轨道交通路网规模近年来保持持续快速发展,路网不断向郊区延伸,站间距不断拉大,4公里以上的长大区间习以为常,16、17号线为代表的接触轨供电模式应运而生。申通地铁接触轨导高值设计为200 mm,拉出值设计为1 550 mm。对接触轨拉出值、导高值进行重复性检测,在实验室环境,接触轨测量参数见表1。

表1 接触轨测量参数
传感器组件安装完成以后,其与水平面夹角、到固定面的测量值也随之确定。距离传感器与水平面夹角α、β、θ,距离传感器4的理论测量值S理论,在任意三个位置测量a、b、L,由公式(1)列出3个方程可以求出α、β、L1的值;也可通过标准量具,多次测量求得。实验室环境任取15个点,来回对选取的随机点进行5轮重复性测量[14-15]。实验检测环境如图9所示,数据处理结果见表2、表3。

图9 实验检测环境

表2 拉出值测量数据与处理
表3 导高值测量数据与处理
Tab. 3 Measurement data and processing of guide height

mm
随机选定15个测量位置,每个位置各进行5次计算,统计测量值与接触轨测量参数值之差,作为测量的示值误差,拉出值与导高值误差分布如图10、图11所示。

图10 拉出值示值误差

图11 导高值示值误差
结果表明,拉出值和导高示值误差均在±1 mm以内;拉出值与导高值的重复性总体标准差分别为0.497 mm、0.417 mm,均在0.8 mm以内;分辨率在0.5 mm以内;拉出值为1 550 mm,导高值为190 mm。测量示值误差、测量重复性、测量分辨率符合设计要求。
6 结束语
通过对接触轨空间形位参数的测量,进行了非接触静态检测系统的设计与研究。提出了接触轨非接触静态检测的原理,实现了接触轨非接触的检测,提高检测效率与精度;通过便携式检测车搭载非接触静态检测系统,提高检测效率、降低劳动强度。接触轨非接触静态检测系统的研究为接触轨检测技术的发展提供了有效参考。
