应用于水下微型潜器的导电滑环结构设计
2020-04-24姜凯李建伟高凡
姜凯,李建伟,高凡
(青岛理工大学 琴岛学院,山东 青岛 266106)
0 引言
随着人类科学文明的进步,水下场景探测、资源勘察等方面的技术亟需发展。水下微型潜器的设计目前仍处于起步阶段,在许多关键技术点上,依然面临设计难点。在微型潜器连接线这个关键结构上,主流设计采用的是刚性连接,无法实现微型潜器水下无位移旋转动作,并且数据信息传输不稳定,极大地限制了微型潜器的运动性能。本文针对这一技术难点,设计了一种导电滑环结构,旨在解决如何提高水下潜器移动灵敏性的问题,同时可提高设备的使用寿命。
目前市场上主流的导电滑环根据环的分布不同可分为轴式、盘式、差动式3大类。 轴式滑环中的环面沿轴向分布,由多个环堆叠起来,环与环之间通过绝缘片隔离。此类滑环可靠性高、结构简单、成本低,但体积较大。盘式滑环的转子通过多圈同心圆环来承载电流和信号,同心圆环之间用绝缘物质隔离,电刷作为定子分布在同心圆环的顶部。此类滑环体积小,但结构复杂、成本较高、工艺要求高。差动滑环通过差动结构,使用环芯来导通上、下两层相对转动的触点。此类滑环体积小、有限空间可提供的通路数多,但环芯的制作难、内部结构极其复杂、成本高。针对微型潜艇应用环境条件的特点,本文在潜艇接线处设计了一种连接稳定、体积小、结构简单的导电滑环。经过方案论证,导电滑环位于潜艇底部,并处于质心线与机体下表面的交汇处。导电滑环中的滑动轴承结构直接与连接线进行固定连接(在滑动轴承内部,连接线与滑动轴承上的凸起触点直接固定连接)。套筒与滑动轴承通过C形滑环[1]滑槽严密地扣合,当潜艇旋转时,固定于潜艇顶部的套筒与固定连接于连接线的滑动轴承发生相对转动。套筒结构中设计有2个滑槽,定子结构直接位于滑槽内部。每当潜艇旋转时,滑动轴承上的凸起触点在滑槽内部滑动转动,与滑槽内部的定子直接接触发生相对转动同时实现电路连接,使潜艇在转向定位时不会受到连接线的扭转力,获得了较高的灵活机动性能,同时也不会对有线的连接处造成损坏[2-3]。凸起触点通过滑槽稳定地与定子接触,保证了电信号的稳定传输,实现了数据的稳定输送[4]。
针对潜艇在水下的应用环境,通过三维建模,绘制模拟出了潜艇整体的三维立体结构。对产品外部构造、内部构造进行设计研发,三维建模如图1所示。
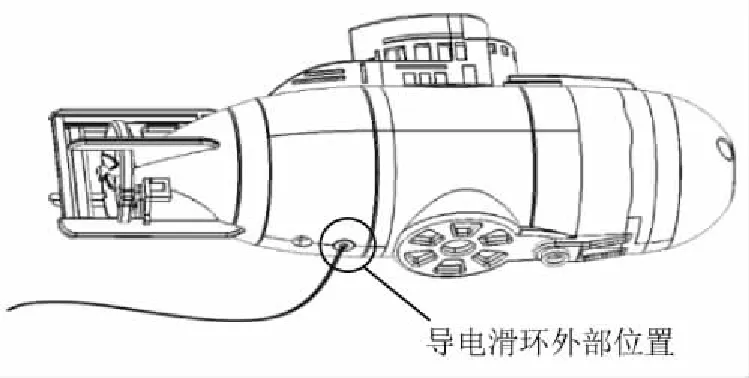
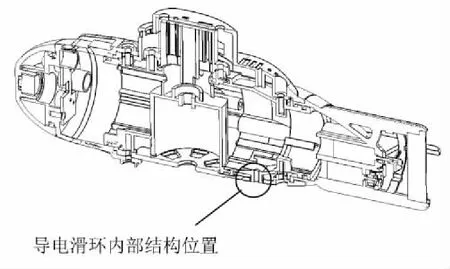
图1 三维结构
1 导电滑环的结构设计
1.1 导电滑环整体的结构设计
本设计位于连接线与潜艇的连接部分,在该连接处采用导电滑环结构。该结构主要由滑动轴承和套筒两部分组成,用于潜艇供电及数据传输的同时,解决了连接线和滑动轴承由于刚性连接降低水下微型潜艇活动灵活性的难题。
连接线连接在固定轴承上(图2),在前全剖视图中可直观地看出,连接线直接与滑动轴承上的凸起触点固定连接,套筒与潜艇的底部固定连接。潜艇在运动转向时,导电滑环结构能够实现连接线与滑动轴承静止不动,潜艇围绕固定轴承自由无限制地旋转。在局部剖图处,旋转密封结构采用C形滑环滑槽组合相扣的密封处理方法。由于潜艇在正常工作时,滑动轴承与套筒相对转动的转速极小,故在套筒与固定轴承之间,对导电滑环实行油封。
图2 导电滑环整体结构设计
1.2 滑动轴承接线结构设计
在滑动轴承上侧,连接线与滑动轴承固定连接。在滑动轴承内部,4根连接线分别与4个凸起触点直接连接固定。滑动轴承分别在1、2两个平面上各有2个凸起球触点均匀分布,保证质心在轴承圆心处,保证了潜艇在旋转时的稳定性。如图3所示。
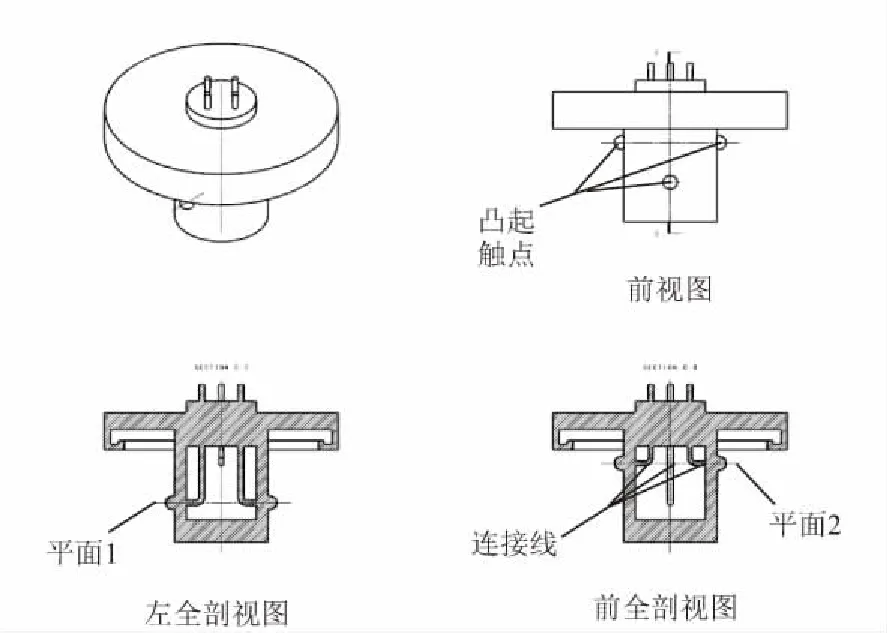
图3 导电滑环的滑动轴承结构
1.3 套筒结构的设计
套筒结构内部有2个滑槽。潜艇运动转向时,由于凸起触点在滑槽内的滑动,使滑动轴承与套筒发生相对转动,其中凸起触点总是与轴承式套筒内壁的定子直接接触发生相对滑动,既保证了其信息传输的实时性,又保证了稳定性。套筒的内部构造要求有良好的密封性,为了防止套筒进水,在套筒内部塞满油脂,如图4所示。
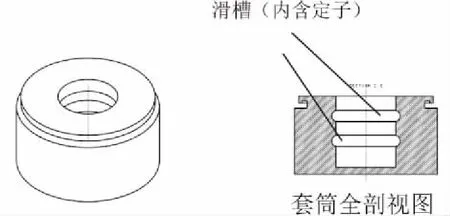
图4 导电滑环的套筒结构
2 相对损耗下导电滑环的寿命计算
当微型潜艇在水中工作,只有潜艇转向时,导电滑环才会发生相对转动进行实际工作,故潜艇该处结构每天最多实际工作时间远低于潜艇的工作时间,约3.5h,且实际应用场景所要求导电滑环的转速极低,约10r/min。导电滑环旋转的总圈数约6500000r。在滑动轴承和套筒旋转时,轴承上的凸起触点和套筒上的定子直接接触发生相对运动,由于接触摩擦产生微量的损耗[5],损耗量可以通过测量体积得到。为了保证导电滑环在水下微型潜艇中正常工作时的使用寿命[6]能够达到基本要求,转子的损耗量必须控制在一定范围之内,定子与转子之间为点接触且充满油脂,起润滑作用,相对摩擦极小。
(1)
式中:k是导电滑环正常工作条件下的工作年限[7];ΔP是每个定子的质量可损耗范围(1.9 g≤ΔP≤2 g);ε是滑动轴承每天相对旋转的圈数(ε≤2000r/d);ω是定子每旋转1圈所消耗的质量(ω=0.3μg/r)。
(2)
式中:kmin是导电滑环最短的工作年限范围;εmax是滑动轴承与套筒平均每天发生旋转的最多圈数(取导电滑环的日平均旋转圈数为εmax=2000r/d)。若要校核计算导电滑环的最短工作年限[7],根据微型潜艇在水中的特殊应用场景,设导电滑环的日平均极限工作状态为εmax=2000r/d,则通过校核计算滑环正常工作,得微型潜艇使用年限最短的范围kmin=8.7~9.1年,满足水下微型潜艇的年限使用要求。
3 实体产品结构设计
针对导电滑环在潜艇中的结构设计要求,导电滑环的位置对微型潜艇的稳定性影响、导电滑环的密封性处理、潜艇实际工作深度试验验证这3个方面对潜艇实际产品的可行性有直接影响。
1) 对微型潜艇整体的稳定性做相应的优化设计,滑环结构位于微型潜艇底部质心处,导电滑环顶部的滑动轴承结构与连接线直接固定连接,大大降低了连接线对潜艇的牵引力,避免了连接线对潜艇灵敏运动的严重干扰。
2) 针对微型潜艇的工作水域体积和下潜深度,考虑到微型潜艇的电机驱动功率和下潜深度较低的因素,在导电滑环结构滑动轴承与套筒之间加入油脂,对密封性做了调试和检验。经过导电滑环的试验证明,当微型潜艇的下潜极限深度为15m时,潜艇的密封性完全满足正常实用要求。
3) 对密封及动力部分进行了部分修改,经过改进完善,生产出实物如图5所示,经过实际水体测试证明,潜艇的水下实际工作最大深度为10~15m。
该微型潜艇可实际应用于水族业、水产养殖业、水下勘探等行业。目前产品通过电源适配器与家用电连接,可以持续操作10h,通过持续操作按键可以实现水中悬停、同深度直线潜航、原地360°调转功能。潜水艇内部设有吸水舱结构进行吸水、排水,已实现垂直方向稳定下潜和上浮运动。项目主要任务已经完成,微型潜艇已经实现搭载视觉及红外传感器,通过物联网信息传输技术与用户手持设备进行交互,并通过Wifi桥接技术并入互联网。
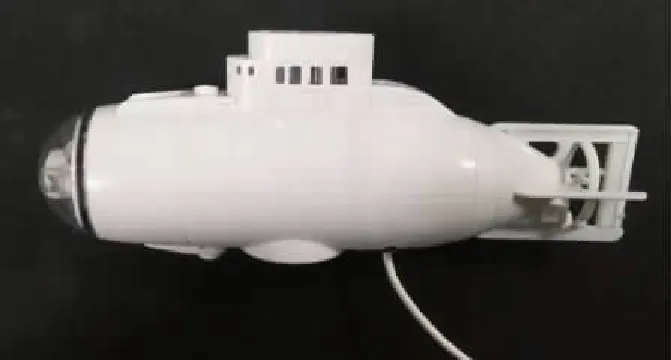
图5 实体外观图
4 结语
经过实验验证,基于水下微型潜器的导电滑环结构设计,实现了定位转动,满足了水中作业时潜艇无限制旋转的要求。该设计提高了整体移动的灵活性,增强了信息传输的稳定性和高效性,能够满足更复杂的水下作业要求,大大提高了水下微型潜器的综合性能。该水下潜器应用范围广、限制低、性能高,具有十分广阔的市场前景。