广义空中交通流建模综述
2020-04-22张洪海胡明华
杨 磊, 张洪海, 胡明华
(南京航空航天大学民航学院,南京 211106)
全球范围内空中交通管理系统正处于全面升级转型阶段,以应对不断增长的飞行需求和相对疲软的空中交通系统运行能力[1]。特别是大型繁忙机场、终端空域和主干航路运行状态已经逼近容量极限,表现出常态高密度运行下协同低质、管控低效,偶发干扰事件(如恶劣天气、军航活动)下应变迟滞、调适固化等问题,交通拥堵和延误已经成为社会热点问题。
与通信网络、地面交通、生产流水线等类似,空中交通拥堵的本质是资源竞争[2],表现为航空器在机场和空域中的滞留现象,如地面等待、减速、绕飞,甚至等待。“以人为中心”的集权式空中交通流系统可视为一个由管制员、航空器(飞行员)和空域主要三要素构成的动态、开放的复杂系统,同时还受通信导航监视、空中交通管理系统、航空气象等诸多外部因素影响。因此,空中交通流是一类具有广义属性的运输流,其拥堵本质是航空器群体飞行活动对于有限管制员生心理资源和空域资源的竞争,除表现为航空器滞留外,还表现为管制员认知负荷和工作负荷的增加,管制性能的下降。美欧“下一代航空运输系统”“单一欧洲天空”、国际民航组织航空系统组块升级计划等发展规划立足国家及地区空中交通现实,提出“基于航迹运行”“网络管理”“优先权管理”“突变管理”等未来运行概念[3],旨在全面提升空中交通系统容量和效能,缓解空中交通拥堵及其波及影响。然而,其首要条件是对“以人为中心”的广义空中交通流拥堵机理的深刻认知。
广义空中交通流拥堵演变机理研究需要完备的航空器和管制员行为信息,以及丰富的交通流运行场景,然而,受限于雷达数据和管制员行为数据的难获取性,交通需求的计划受控性,实证方法难以捕捉拥堵产生、累积和消散过程,特别难以剖析各类要素影响下的拥堵演变机理,无法支撑未来需求增长下的交通流管理。因此,广义交通流建模通过观测空中交通流运行过程中的宏微观现象,建立尺度、粒度各异的交通行为模型,推演空中交通流拥堵特性和影响机理,成为国内外研究空中交通拥堵基础科学问题的重要手段之一。
根据建模对象侧重程度,广义交通流模型可分为“以流为中心”和“以人为中心”的空中交通流模型,即面向“流”的空中交通流模型和面向“人”的管制员个体行为模型两类。其中,根据模型基本原理和精细程度,空中交通流模型主要分为流体力学模型、队列网络模型和航空器微观模型;管制员个体行为模型主要分为认知模型和计算模型两类。现评述各类广义交通流模型的核心理念、建模方法、主要特点和适用范围,提出广义交通流建模未来亟需进一步突破和努力的方向,以期为空中交通流基础理论和应用技术研究提供参考借鉴。
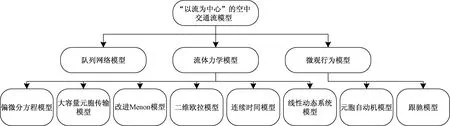
图1 “以流为中心”的空中交通流模型组成架构
1 “以流为中心”的空中交通流建模
实施全国及大范围空中交通流量管理,其关键基础在于把握空中交通流的整体特性,定位拥堵发生的时空热区。因此,为提升空中交通流时空分布长期预测精度,支持战略和预战术层面的大范围跨区域流量管理,研究人员开展了大量的空中交通流建模工作。排队网络是起步最早、最为成熟的交通流模型之一,能够准确刻画群体航空器在空域容量和安全等限制下不断请求服务的现象,广泛应用于空中交通系统容量规划和延误预测。为准确描述交通流内部的相互作用过程,加强对于空中交通流拥堵机理的认识,提出交通流元胞自动机和跟驰模型,通过宏观推演群体航空器微观行为挖掘空中交通流拥堵传播过程。受地面交通流流体力学模型的启发,研究人员围绕流量守恒原理和流量-速度-密度基本关系式,开展了一系列面向战略流量管理的空中交通流宏观流体模型的探索,有效增强了空中交通流长期预测性能,开启了采用现代控制理论进行交通流建模和控制的时代。空中交通流模型组成架构如图1所示。
1.1 排队网络模型
拥挤往往伴随以下联结特征:等待服务的客户流;可用服务受限;客户流和/或服务出现不规则的扰动。具有上述特征的系统往往采用排队系统进行建模[4]。空中交通运行中,等待进入扇区的航空器可以视为客户流,航空器飞经扇区的时间可以视为受容量和安全等约束的服务,航空器等待服务的状态包括地面等待、空中调速、机动绕飞、盘旋等待等。因此,空中交通流是一类典型的排队系统[5]。
队列模型已经广泛应用于机场、终端区和航路交通建模,通过单服务台和多服务台模型研究交通延误和空域容量问题[6-7]。近年来,随着大范围交通流运行控制需求的产生,服务队列建模逐步向排队网络建模升级。一类简单的空中交通流队列网络如图2所示[8]。图2中共有3个机场,每个机场包含两条队列,进场队列和停机位队列。其中,进场队列用于模拟航空器着陆阶段的排序和汇聚过程,停机位队列包含多个机位,模拟航班周转过程。一旦航空器离开机场,则根据飞行计划进入与之相连的另一机场的进场队列中。因此,排队网络是由多个队列输入输出耦合相连的拓扑结构,主要分为确定性网络和随机网络。Hansen[9]建立确定性队列模型分析进场交通流中的延误传播方式,包括探讨如何通过取消部分航班提升整体服务质量。为体现战略层面交通流运行的不确定性,可采用随机队列网络描述交通流的运行状态。随机网络通常是在某一种到达分布下(如独立泊松分布)研究排队网络状态的概率演变问题。若网络中各队列客户数量为独立随机变量,则该网络为开放式Jackson网络。Menon等[10]和Hansen等[11]建立的交通流队列网络是交通流密度、平均速度和扇区容量的函数,通过分析相关变量与交通流效率之间的关系,研究轨迹不确定性对于交通流效率的影响。Tandale等[3]为研究交通流参量和交通流效率之间的关系,根据节点的数量和模型精细程度分别建立了全国、地区和局部排队网络,网络包含20个区域管制中心和相关航路,基于历史飞行数据预测队列参数和状态转移概率。研究结果表明,飞行效率随着容量的增大而增大,并在容量增加至一定值后飞行效率保持稳定。然而,研究发现仍较为初级,且缺乏对采用Jackson网络假设的验证。
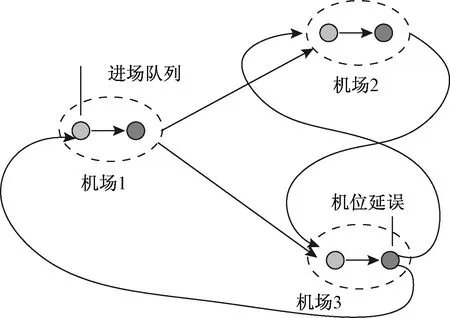
图2 空中交通流队列网络示意图
1.2 宏观流体模型
与空中交通相比,道路交通拥堵现象更易观测。20世纪50年代,研究人员通过分析交通流量与交通密度之间的关系分析了道路交通流拥堵的停滞现象。近年来,“幽灵堵车”和“时走时停”现象也成功得以量化解释[12]。道路交通流宏观模型是基本交通流模型之一。1955年,英国学者Lighthill等[13]将沿道路行驶的群体车辆视为连续流体介质,提出了流体动力学模拟理论,建立Lighthill-Whitham-Richards(LWR)交通流连续性方程
(1)
式(1)中:∂ρ(x,t)和∂q(x,t)分别为欧拉坐标系下时空坐标(x,t)处的密度和流量。在此模型基础上,依据流体流-密-速的基本关系式可以解析推导交通波传递模式,分析拥堵传播-消散过程。近年来研究表明,交通流密度和流量之间的具有更加复杂的函数关系。
空中交通流运行过程中,地面等待、尾随间隔管理、改航等流量管理策略,以及调速、机动、盘旋等待等管制行为可以延迟航空器进入拥堵区域的时间和空间,其决策的制定与全局交通信息紧密相关,而非仅关注局部交通密度。因此,空中交通流密度和流量之间同样也难以用单一方程进行刻画。为研究全国或大范围空域内交通流传递及其状态演变,在LWR模型启发下,研究人员致力于交通流宏观模型的研究,以期分析和预测交通流拥堵状态,支撑战略级流量管理。目前,宏观空中交通流主要分为6大类:偏微分方程(partial differential equation, PDE)模型[14]、改进Menon模型(modified Menon model, MMM)[15]、大容量元胞传输模型(cell transmission model-large capacity, CTM-L)[16]、二维欧拉模型(2D Eulerian flow model)[17]、连续时间模型[18]和线性动态系统模型(linear dynamic systems model, LDSM)[19]等。其中,PDE模型对LWR模型的直接应用;时间连续模型基于控制单元内速度定常的假设;CTM-L和MMM是对时间连续模型一阶有限差分的变形;为更加真实反映交通流在空中流动方向性,二维欧拉模型将一维单向MMM模型扩展至二维8向;线性动力系统模型是对二维欧拉模型面元的无方向性变形。模型之间的相互关系如图3所示。
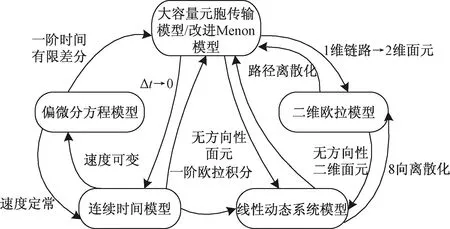
图3 空中交通流宏观流体模型关系
1.2.1 PDE模型
Bayen首先提出采用基于连续时间和空间的LWR偏微分方程建立国家空域网络空中交通流模型,后由Sun等[20-21]进一步完善深化。PDE模型采用相互联结的一维线元(或“路径”)表示空域中的航路航线网络。因此,空中交通流在长度为L的航段上的运行表示为偏微分方程[14]:
(2)
式(2)中:C(x,t)表示时刻t航段[0,x]航空器数量;航段中静态平均速度剖面为v(x);q(t)代表航段的流入量。
为更好地对交通流进行控制,便于对交通流密度施加约束,式(2)通常改写为
(3)

线元相连能够形成具有汇聚和发散节点的网络,交通流在网络中的传递问题可用偏微分方程组表述,文献[14]指出该问题存在唯一解。PDE在仿真中展示了优秀的航空器数量预测性能。随着交通密度的增加,航空器群体的流体特性更加显著,PDE的预测性能也越高。
1.2.2 改进Menon模型

(4)
式(4)中:aj、bj为比例系数,aj,bj∈[0,1],用于模拟不同饱和度下交通流飞经元胞的状况;xj为元胞j内的航空器数量;yj为流出元胞j的航空器数量;uj为因交通流控制滞留在元胞j内的航空器数量。
Menon模型的精度依赖于交通流率的变化和空域离散化程度(即元胞物理尺寸),与航空器数量无关。元胞尺寸由交通流平均速度和理想的时间分辨率决定。根据Shanon采样定理[23],时间分辨率通常为交通流模式变化率的2倍以上。
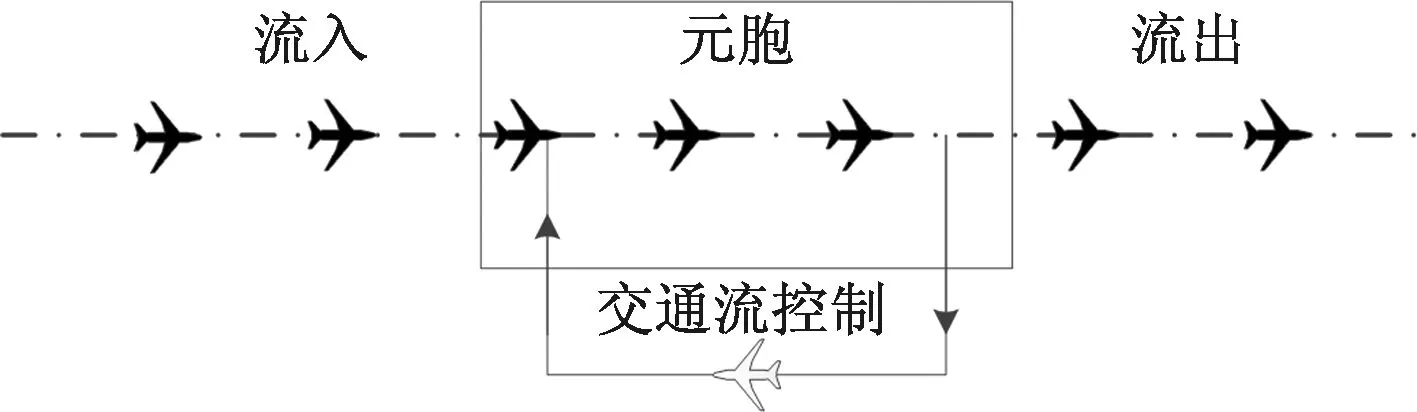
图4 一维元胞内交通流控制示意图
1.2.3 大容量元胞传输模型
CTM-L模型原理与MMM模型类似,也是在道路交通流元胞传输模型基础上演化而来的,用于区分具有不同目的地属性的交通流,解决在MMM模型中交通流发散系数的经验化和固定化问题。CTM-L是一个基于图论的多物流网络模型,采用聚类方法生成每架航班在网络中的进出点和飞行路径(path),每条飞行路径被扇区划分为多个链路(link),每个链路又可进一步细分为若干元胞。若多条路径具有相同的链路时,则对相应的链路进行复制。“大容量”不是针对网络中的单个元胞而言,而是扇区中一组元胞共同表现出来的特性[16]。CTM-L基本概念如图5所示。
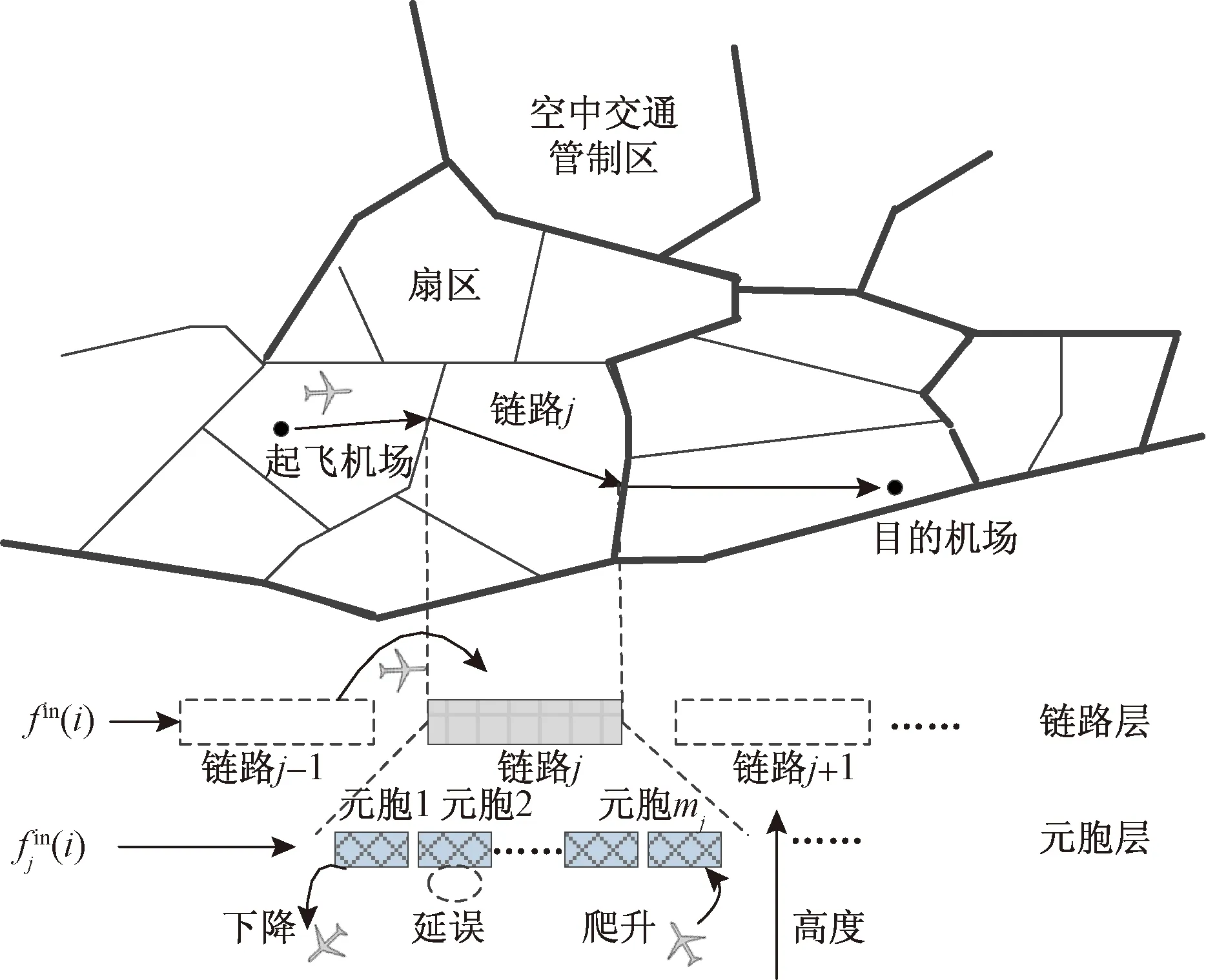
图5 大容量元胞传输模型示意图
链路中元胞的数量由历史平均飞行时间和采样周期决定。同样,元胞尺寸越大,计算精度越低;元胞尺寸越小,模型阶数越高,计算复杂度越大。显然,当状态方程扩展至扇区、管制区层面时,CTM-L具有极高的维数而难以计算。据此,Cao等[24]进而提出链路传输模型,直接针对链路构建流量转移方程而非元胞,从而降低了状态方程维数。大容量元胞传输模型和链路传输模型综合了欧拉和拉格朗日模型的优点,模型形式有利于交通流控制设计,又包含了飞行路径信息,能够较好地文献[14]的解决扩散性问题。Zhang等[25]、张洪海等[26-27]基于一维元胞传输模型建立系统动力学推演方法,首次对终端区进离场交通流流量-密度-速度三参数关系进行研究。研究表明,采用系统动力学推演元胞传输过程具有较高的计算效率,为元胞传输模型的交通流分析提供了新的技术手段。
1.2.4 二维欧拉模型
空中交通流一维元胞模型是基于航空器严格遵循航路航线飞行的假设。然而,随着用户优选航路的推广,航空器为保持最优风向而偏离航线。因此,需要一个更为灵活的交通流建模框架,更为全面地反映交通流运行状态。基于二维面元(surface element, SE)的欧拉模型是MMM的变形,将一维交通流模型拓展至二维平面中[17]。模型将空域按照经纬度离散为1°×1°的正方形面元,每个面元的有8个邻域,因此,面元中的交通流由上下左右和斜角共8个流向,如图6所示。每个面元的状态方程如式(5)所示。
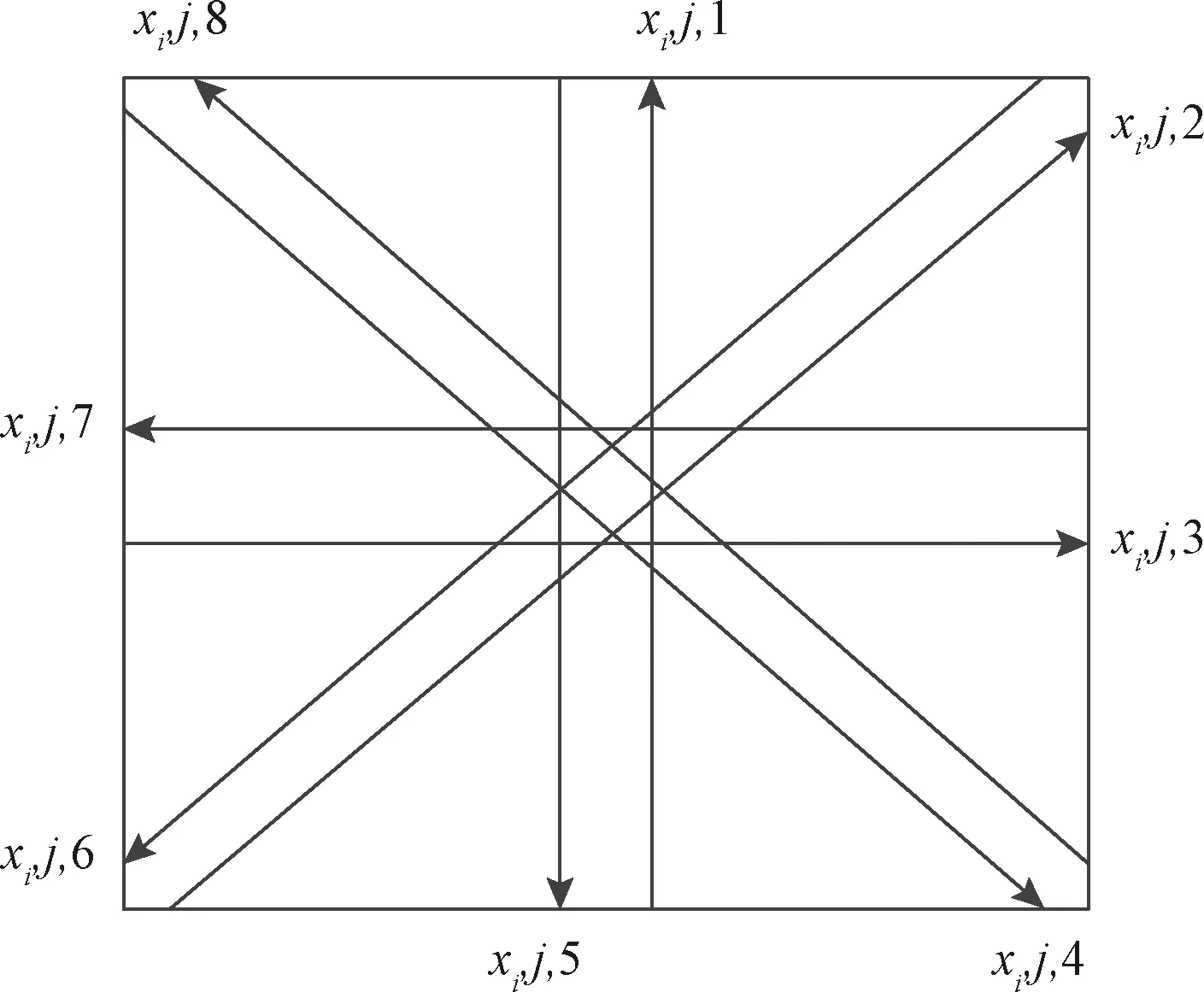
图6 交通流欧拉模型二维面元
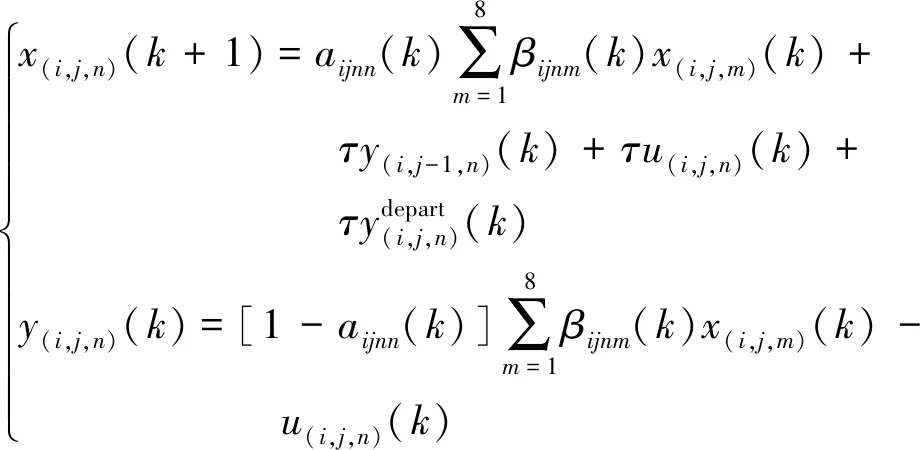
(5)
式(5)中:下标i、j代表面元序号;m、n表示面元中交通流的序号;x代表交通流中所包含的飞机数量;a为留在交通流中的航空器比例;β为在交通流之间切换的航空器比例;ydepart是从面元下方机场飞入的交通流率;u为控制作用下滞留在交通流中的交通流率;y为从相邻面元流入的交通流率。因此,与一维线状交通流建模类似,式(5)也可表示为如下控制方程:

(6)
式(6)中:A(k)~D(k)为面元所有交通流的控制比例系数矩阵;v(k)为面元内所有交通流整体的滞留率。
不同的是,基于面元的方法可以通过交通流之间的互相转换来表示空中交通的改航,模型更能反映实际的交通流运行情况。模型中的相关参数可以采用未来空中交通管理运行概念评工具模拟飞行计划获取。利用计算机辅助计算交通流模型的方法可以弥补欧拉模型较高的求解复杂性,使得研究大范围空域内的交通流优化成为可能[28]。
1.2.5 时间连续模型
时间连续模型中假定每个元胞内航空器飞行速度为常量,因此可视为PDE模型的简化[18]。在此假设下,模型可以采用常微分形式进行表述:

(7)
式(7)中:A是系统状态转移矩阵,包含元胞传输时间,即航空器通过元胞所需时间,以及发散状态下的分流参数;d是机场起飞流向量。
时间连续模型采用一维单向元胞网络。在实际运用过程中,模型可以通过对MMM模型进行一阶欧拉积分或将离散时间片趋近于0获得。因此,时间连续模型亦可视为连续型的MMM。
1.2.6 线性动态系统模型
航空器离场时间存在不确定性,且受天气、风向等影响,航空器在指定时刻所在的位置和状态难以预测。Roy等[19]采用随机模型框架描述交通流随机特性。与欧拉模型不同,模型将空域划分成不同大小的二维面元,采用离散线性系统描述交通流在面元之间的传递过程,且在线性动态系统中,交通流向为任意方向。模型假设所有机场的离场过程为独立的变速率泊松过程,进入或离开区域的交通流也为泊松过程,因此,区域中交通密度也是符合泊松分布的随机变量,随时间的演变规律如下:
(8)
式(8)中:Uij为一个时间步长内从区域i流入区域j的航空器数量,当时间步长足够小时,区域内航空器数量为si[k]时交通流Uij[k]的条件分布可以用泊松随机变量来近似,均值为pij[k]si[k],pij[k]为一架飞机从区域i飞入区域j的概率;当时间步长较大时,Uij[k]必须用相关的二项式随机变量表示。
然而,该方法最大局限在于假设离场飞行为泊松过程。实际上,在大型的枢纽机场,离场率在一天中变化较大,难以用某一泊松过程描述。并且,文中假设预测周期内交通流特性是不变的,并用一个线性时不变动态系统描述整个预测周期内的交通态势。当预测周期较长时,预测精度明显下降。为更加准确各区域之间交通流传播关系,Sridhar等[29]在文献[19]基础上将模型扩展为线性时变系统,将整个预测周期分为多个时段,各一个时间段的交通流特性用一个状态转移矩阵描述。为更准确计算离场率,将离场过程分为确定性和随机性两部分,确定性部分根据重复性飞行计划或历史离场数据获取,随机部分假设服从高斯或泊松分布。在一个时间步长内,交通流流入率和流出率假设正比于当前区域中的交通量。该方法可以量化交通量预测的不确定性,也可以快速计算出各类天气条件和交通态势下空中交通流时空分布,推断交通拥堵区域及原因。
空中交通流宏观模型在LWR模型基础上得到了较为丰富的拓展,逐步形成了基于现代控制理论的空中交通流建模与控制框架,以较高的性能支持空中交通管理的战略决策。空中交通流宏观模型特点对比见表1。

表1 空中交通流宏观流体模型特点对比
1.3 微观行为模型
排队网络和流体力学模型从宏观上建立空中交通流整体状态传递方程,对于研究大范围跨区域空中交通流演变,量化预测长期交通拥堵态势具有良好的性能。然而,与地面交通流相比,空中交通流目前仍属于稀疏流,在交通密度较低的情况下宏观模型的精度将会显著下降。此外,宏观模型难以刻画和解释空中交通流拥堵的微观机理。因此,以航空器为对象,通过建立群体航空器之间的相互作用模型推演空中交通流状态涌现,揭示空中交通流拥堵规律和内在机理,以较高的精度支持面向复杂运行场景的战术空中交通管理。
元胞自动机是一个高度理想的物理系统,具有离散的时间和空间,以及有限的状态变量,能够在简单的规则下能产生复杂的行为,如地面交通流元胞自动机模型仅通过加减速、随机性和位置更新四个简单的规则即可推演“停止-前进”现象和交通拥堵的自发涌现[30]。Zhang等[31]采用Nagel-Schreckenberg一维元胞自动机建立航路交通流模型,考虑了飞行员的反应时间和随机慢化概率,是对地面交通流NS模型的直接借鉴。Amor等[32]为探索空中交通管理性能之间的迁移,基于调速和改航拥挤调配策略,采用基于agent的元胞自动机模型模拟了欧洲航路交通流运行状况。模型定义扇区为元胞,航空器为agent,航空器agent在扇区中飞行规则如下。①可用性:当且仅当交通量未超过容量时定义扇区可用;②扇区飞行时间s:当下游扇区可用时,当前扇区内飞行时间为Δs,否则,延误一个时间片,为Δs+1。其中,Δs为满足[min,max]正态分布的变量;③改航:如果扇区可用,则下一扇区为si+1(根据航班计划);否则,下一扇区为sc,概率为pr。其中,sc为扇区si和si+1的邻域;④随机性:飞行时间Δs的波动量为±1个单位时间,波动概率分别为p1和p2。该模型是基本元胞自动机模型的扩展,并通过规则的随机性表征空中交通的不确定性,较好地捕捉了欧洲航路扇区的临界密度。
道路交通流跟驰模型采用运动学方法,模拟在无法超车的单一车道上车辆列队行驶时,后车跟随前车的行驶状态。研究人员发现,跟随飞行也是空中交通流运行的重要特征之一。因此,借鉴地面交通流跟驰理论,文献[33]和文献[34]面向下一代航空运输系统空中高速路运行概念,建立单层航路的交通流微观跟驰模型,分析飞行速度、航空间隔等对于跟驰强度(即加速度)的影响,扩展构建空中交通流宏观流量模型。文献[35]进一步根据空中交通流运行特征,考虑了陆空通话造成的飞行员操作时间延迟,建立航空器调速、机动和等待多种跟驰模式,推演了终端区交通流流量-密度-速度的基本关系和相变机理。
目前,交通流微观行为模型仍然停留在狭义的航空器飞行行为中,尚未对空中交通运行的集权式管控动态性和适应性特征展开的描述,模型过于理想,难以支撑预战术和战术精细化空中交通管理。
综上,当前空中交通流建模方法主要包含排队网络模型、宏观流体模型和航空器微观行为模型等,侧重于在基础管制策略下对航空器相互约束和交通流整体状态的刻画,形成了面向“流”的空中交通建模与控制领域的重要分支。各类方法的特点对比见表2。
2 “以人为中心”的空中交通流建模
空中交通流是人(管制员)、航空器(飞行员)、空域、环境共同作用下的产物。与道路交通流等一般自治性运输流相比,空中交通流集中受控性决定了交通流运行及状态演变具有极强的人因控制性。“以流为中心”的空中交通流建模中虽然初步考虑了调速、机动、等待、改航等管制策略,但难以支持研究冲突探测与解脱、航班排序等管制决策动态性对于交通流状态演变的影响。如何从管制员微观行为的角度建立空中交通流模型是研究“以人为中心”的空中交通流特性面临的重要难题,也是阐明管制员认知决策模式及其复杂性,研发适用性交通流自动化管控工具的必要前提。
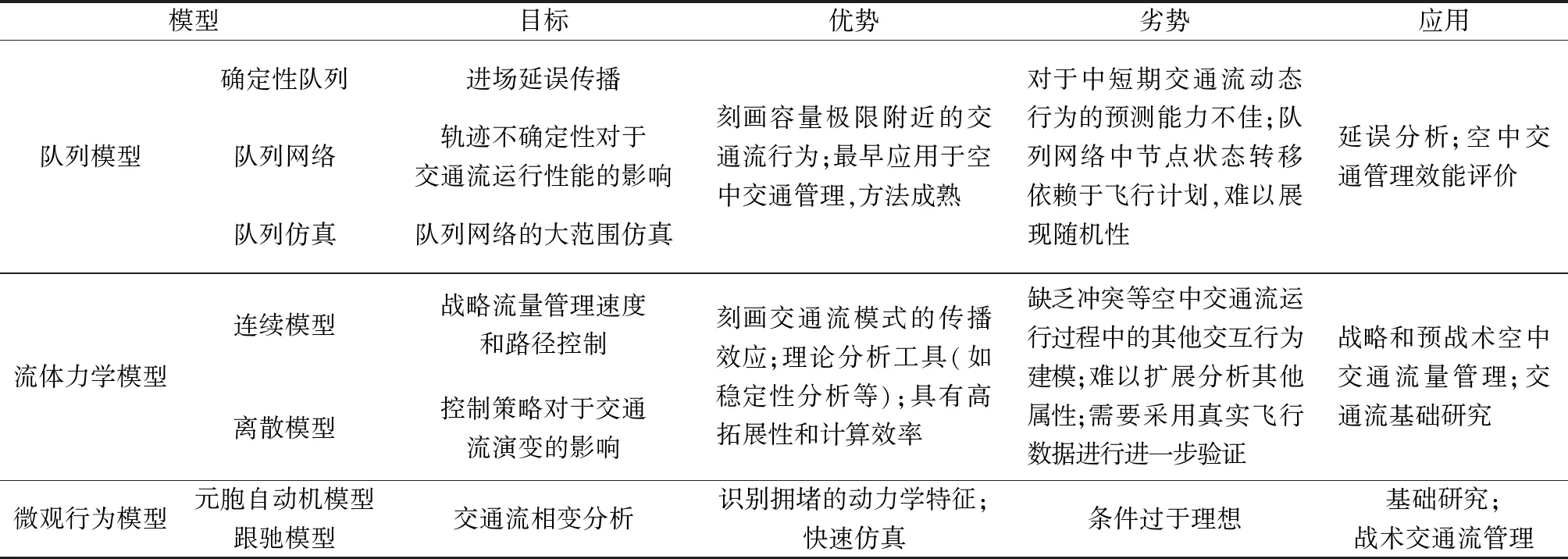
表2 “以流为中心”的空中交通流模型对比
1997年,Odoni等[36]首次将空中交通管制员行为模型分为宏观与微观两类。其中,宏观模型将人的内在信息处理过程视为黑盒,建立输入输出信息之间的转化机制,是研究特定个体活动或者整体性能的高层次(high-level)分析模型,例如管制任务交叉模型[37],个体反应延时模型[38]、管制员工作负荷模型[39]等。宏观模型能够反映个体能力与性能,但其过于普适性而难以适用于特定和动态情境下的个体行为以及伴随的交通流行为的预测。相反,微观模型以交通态势感知为输入,通过建立复杂的决策规则库或算法,以期准确预测个体对交通流的管控行为。虽然过于细节地建立个体的内在认知过程并不是研究管制行为的必要手段,但考虑管制员处于高度动态和复杂的环境中,管制任务具有多重性和时间约束性等特征,微观模型能够较好地刻画管制员进行有限资源分配的认知过程,相较宏观模型更适合于管制个体行为的建模。当然,宏观模型亦可应用于微观模型中,如个体行为反应延时等。微观个体行为模型可以划分为两大类:管制行为认知模型和管制行为计算模型。其中,管制行为计算模型可再细分为“触发-执行”模型和任务管制模型,如图7所示。

图7 管制员个体行为模型分类
2.1 管制行为认知模型
管制认知模型旨在刻画低层级的认知过程,包括注意力资源分配、记忆使用、情景意识、决策制定、感知和监控能力等,能够支持研究管制认知行为对于交通流状态演变的影响。目前,管制行为认知模型可分为以下5类。
(1)空中交通管制认知模型(cognition model-air traffic control, CM-ATC)基于大量的现场调研,宏观构建了航路管制员基础认知框架和高层次认知过程,并针对各项管制工作建立认知活动流程[40-41]。该模型概念任务流程在机场和终端区进离场运行中得到进一步验证和扩展,但目前尚未建立其计算模型[42]。
(2)空中交通管制预测模型(air traffic control-projection process model, ATC-PPM)也是一种高层次管制认知活动与环境交互模型,旨在更好地理解管制员在进行交通流间隔调配时的脑力活动过程。Reynolds等[43]重点针对终端区进场交通流和洋区监视活动建立了ATC预测模型[44]。然而,目前该模型尚未用于探讨管制员认知性活动的流程与自我管理机制。
(3)机器集成设计与分析系统(machine integrated design and analysis system, MIDAS)是一个通用的仿真工具,主要用于量化测度和可视化分析人在多样虚拟环境中的操作行为[45]。个体运作模型是MIDAS的核心要素,能够高精度地模拟人的感知和决策过程[46]。MIDAS在航空领域取得了重要应用,拓展研制了Air-MIDAS。2002年,Pritchett等[47]针对航路交通环境,采用Air-MIDAS制作任务描述和行为脚本,建立飞行员和管制员的行为模型,开展航路交通人员行为研究。然而,基于MIDAS的管制行为建模依赖于对管制员任务的界定,但目前尚未完备地表征管制员的全部职责。
(4)程序执行体系(architecture for procedure execution, APEX)模型采用agent架构,建立了具有类人行为的航路空中交通管制员模型[48]。该模型框架采用了高层次认知的部分内容,并将其融入个体资源框架、行为选择框架和程序库等任务域模型中。研究人员将任务域分解为基础任务的集合,并采用独立于任务域的个体认知行为模板进行描述。模板库设计包含了在多重任务域中反复出现的基本行为的心理模型,如移动和点击鼠标。APEX的目标旨在评估管制任务需求,而不是建立能够正确执行空中交通管制的agent[49]。
(5)空中交通管制员行为模型(modell der fluglotsen leistungen, MoFL)是一个注意力资源模型,旨在捕捉航空管制过程中与冲突探测与解脱相关的认知活动[50-51]。MoFL依托理性思维适应性控制编程环境[52],围绕大脑形成的核心图像、刻画情境意识的工作记忆,以及三个受控(重要性和紧迫性选择)且相互协调的信息处理环进行构建。其中,监视环旨在权衡即时性冗余信息提取及与之对应“图像”适应性;预期环旨在预测每架具有关注需求航班的未来状态以期探测冲突。一旦探测到潜在冲突,冲突解脱环即刻触发。大脑“图像”更新过程是MoFL最显著的特征。该模型能够分辨处于不同紧迫程度的航空器并设定差异化的“图像”更新频率。
综上,CM-ATC和ATC-PPM虽然尚未以仿真方式得以实现,但给出了管制员在执行交通流管控时内在认知过程的一般性发现。Air MIDAS、APEX和MoFL能够仿真细节的认知行为,包括从眼动模拟到有限注意力资源分配,并据此评判管制工作负荷。然而,这些模型需要对于个体行为和认知的深刻理解,同时,需要花费大量的时间和人力成本。APEX建模试图通过构建心理行为模板为研究人员缓解上述问题。Air MIDAS、APEX的根本问题在于其平台并不是为空中交通管制领域所构建的,因此无法融入任何的冲突探测与解脱逻辑。
2.2 管制行为计算模型
管制行为计算模型是以交通流管控任务和设备运行操作为对象,以管制领域知识为支撑的直接建模,又被称为“任务解析”模型[53],能够支持交通流与管制员状态的并行模拟和测度。管制行为计算模型可进一步细分为不受限“触发-执行”模型和受限“任务管理模型”。
(1)“触发-执行”模型不考虑当前管制任务负荷,事件一旦触发即刻执行,忽略管制个体执行多任务时的能力限制,难以刻画因管制思考、通信等时间带来的交通流状态改变的延迟。该类模型的主要代表为当前主流的商业仿真软件,如TAAM(total airspace and airport modeler)、RAMS(reorganized air traffic control mathematical simulator)等。其中,RAMS虽然具备基于权重的任务分配模型,但该模型以开环的形式存在,仅用于测度管制工作负荷,并没有作用于交通流仿真时间轴本身。
(2)“任务管理”模型通过计算的方式模拟管制个体面临问题时的优先级分配和解决行为。该模型在一定程度上忽略了个体内在的认知过程,但仍然能够表现个体行为受限特征,包括多任务下执行周期分配等。瞬时工作负荷对于任务执行的影响可以通过构建任务持续时间与即时交通情境特征(如航空器数量)之间的关系进行表征。此外,任务持续时间可用概率的方式进行表达,以反映管制员行为的不确定性,模拟偶发的长时任务周期。特别的,个体选择模型(operator choice model, OCM)聚焦研究了任务持续时间的随机变化特性[54]。OCM应用状态机方法,通过赋予各类状态迁移周期(任务执行时间)及迁移选择(执行结果)一定的随机概率,建立基于连续时间概率自动机。例如,建立概率冲突探测过程和随机决策模式生成最终的交通流状态。这种概率交叠的方法虽然很有新意,但增加了空中交通管制模型的复杂性,并且目前所构建的扫描-分类-决策-行动等状态仅面向冲突探测与解脱任务,尚未能够覆盖管制各环节。不考虑管制员认知复杂性,能够支持ATC所有任务并模拟多任务执行管理的是由NASA开发的“ATC agent”[53-55]。该工具研究目标是与快速仿真和“人在回路”仿真工具进行集成。“ATC agent”中每个任务均设置了任务执行进程,并由高层次执行模型控制进程中agent所需行为。任务执行进程均以当前交通流态势评估为起点更新交通“图像”,包括冲突探测和事件观测;然后,agent基于交通“图像”建立带有优先级的任务列表及备用方案;最后,依据列表中的任务顺序依次执行。agent任务明细、控制策略和任务列表构建策略可应用于各类空域扇区。Callantine等[56]依托该工具实例对比了终端区雷达管制模型与真实管制行为,验证了“ATC agent”在航空器受限下行为的友好性。
目前,所有的任务管理个体计算模型均循环不间断地模拟人的行为,并基于管制员无法在同一时间完成多项任务的假设。事实上,实验证明管制员可以同时进行监视、移交和指令发送[49]。“ATC agent”模型基于任何紧急事件必须在当前任务执行进程结束才能被有限执行的假设,其管制行为如图8所示。因此,每个进程都将被赋予一个最大的执行周期,这和实际是不相符的。因此,上述两种假设是当前“任务解析”模型中所需进一步提升的内容。
综上,管制员微观行为模型特征见表3。其中E/A/T分别代表航路/终端区进场/机场;“√”表示功能具备,“○”表示可以扩展。总体来说,“ATC agent”工具提供了目前最成熟的个体建模框架以刻画空中交通流仿真中的管制行为。然而,对于致力于个体底层认知行为及其对交通流运行影响研究,MoFL和Apex工具将更为适合。
对于空中交通流建模和仿真来说,过于简单的模型可能导致信息缺失甚至产生误导信息。为充分还原真实交通运行,“以人为中心”的空中交通流微观仿真模型应具备多任务性和基于信息传递的环境交互功能,以及冲突探测与解脱、交通流排序等典型交通管控能力。因此,管制员个体行为限制是“以人为中心”广义空中交通流建模仿真所需考虑的关键因素。首先,可靠的任务执行时间对于交通流推演时间线,特别是高峰小时内交通流状态推演具有一定的影响。“触发-执行”模型忽略了任务执行所需时间,理想地模拟了交通流控制行为,不适用于空中交通流运行仿真。其次,并发任务的执行和任务中断尚未在当前的任务解析模型中体现。虽然上述行为对于仿真结果的影响较小,但对于繁忙状态下的交通流运行可能具有一定影响。尽管如此,忽略此特性可以视为对管制员能力的保守建模。再者,建立包含航空器状态和环境数据提取的心理图像模型十分重要。虽然在MoFL中描述了管制员注意力分配模型,但其工作机理并不清晰。因此,亟需定义适当的任务优先次序,建立基于管制范围内瞬时所需关注航空器数量的适应性监视周期和冲突探测过程。再次,冲突探测过程应受限于管制员能力。爬升和下降过程中管制员大脑对于航空器状态的推测是十分困难的。传统上来说,管制员通过分配阶段性的定常速度和高度来简化进场交通流间隔和排序问题。连续下降进近中管制员通过观察航空器相对距离的变化率,在标准减速剖面下可以具备与定速飞行近似的冲突预测能力[43]。冲突探测中的认知理论是重要的信息源,但是难以适用于任意复杂交通流场景。根据认知抽象,采用近似运动方程更加切实可行。此外,冲突预测过程应增加可靠性评价,探测时间提前量是最简单的模型补充。OCM冲突探测的概率模型是预测准确度评价模型的范例。然而,该模型需要大量实验构造概率方程以涵盖所有的相关场景和运行程序。因此,基于简化的、具有充足理据的概率集是建立冲突探测较好的折衷方法。最后,管制员冲突解脱方面,研究表明建立需要大量决策变量的优化方程并不适用于管制员冲突解脱建模;同时,构建完备的规则或案例库复杂程度非常高且耗时耗力。根据Rasmussen等[57]的认知行为分类,管制员的行为介于基于规则的行为和基于技巧[42]的行为之间,几乎没有基于知识的行为。该发现表明,建立采用规则或案例的方法建立完整的冲突解脱逻辑是理论可行的,其难点之一在于如何融入解脱策略的多变性以表征管制员行为的非确定性。
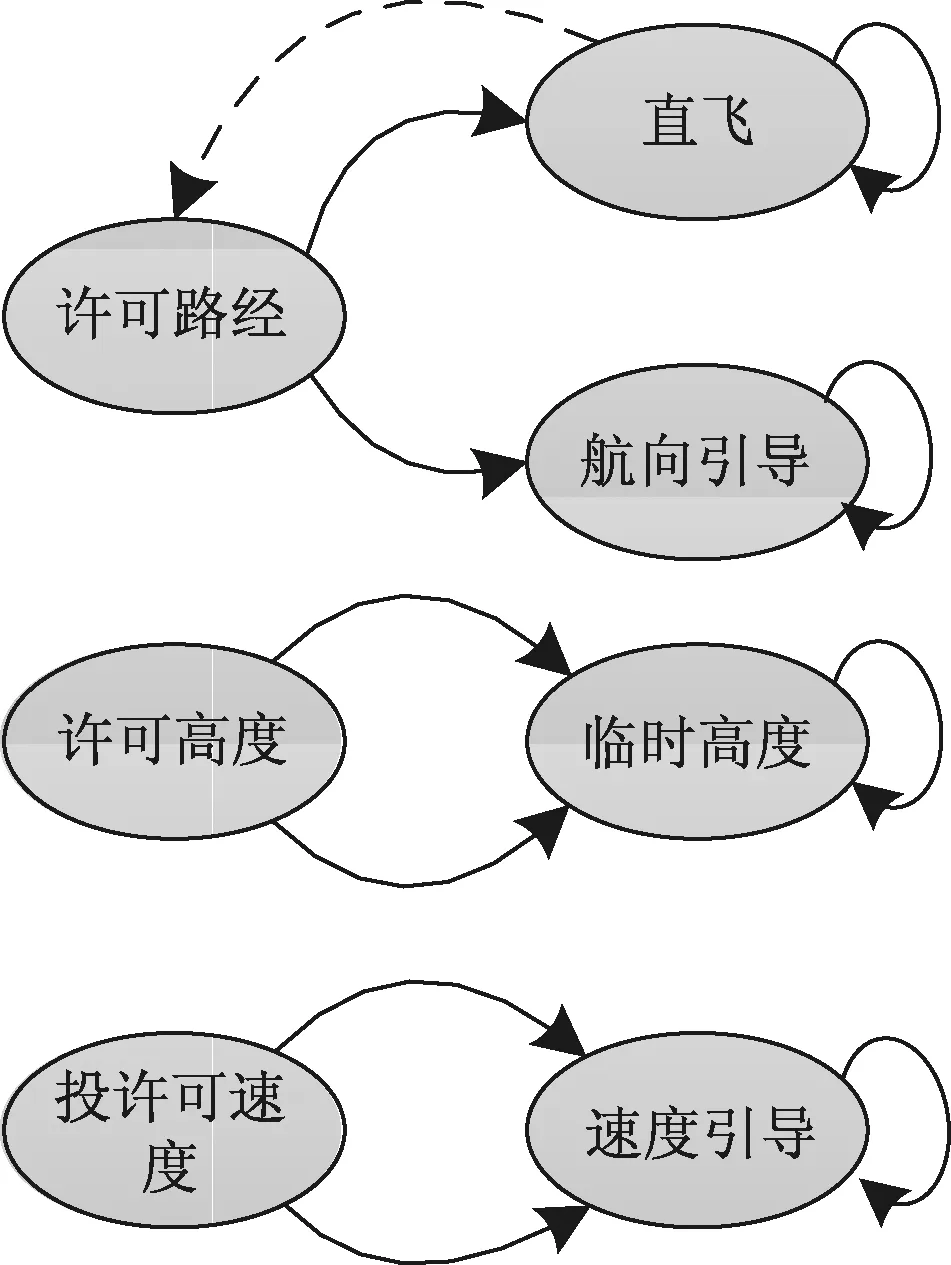
图8 ATC agent中管制行为模型

表3 管制员微观行为模型对比
3 广义空中交通流建模特征及趋势
广义空中交通流运行枢架如图9所示。建模是对系统特征的描述,是为理解系统本质而进行的一种抽象。纵观空中交通流建模发展历程,呈现“以流为中心”和“以人为中心”两大研究分支并行发展态势。其中,“以流为中心”的建模以交通流或航空器动力学模型为核心,旨在推演全国或大范围空域系统拥堵态势演变规律,但忽略或者较少地考虑空中交通管制员动态策略和能力限制对于空中交通流传播的影响;“以人为中心”的建模聚焦于管制员底层认知行为和高层决策模式,从管制员的角度建立复杂的交通流微观管控模型,能够较好地体现集权管控下管制员和交通流状态的互影响关系,但模型的复杂程度难以支撑全国或大范围的交通流推演和战略空中交通流量管理。然而,随着空中交通系统运行概念的升级,辅助决策设备自动化智能化程度的提升,空中交通管控将逐步呈现个性化、自主化、协同化发展趋势,特别是基于航迹运行、自间隔等概念的实施,空中交通运行微观机理和宏观流动模式都将产生极大的改变。因此,面向空中交通流广义属性,针对当前交通流建模亟需突破的瓶颈和未来空中交通发展需求,研究趋势表现在以下几个方面。
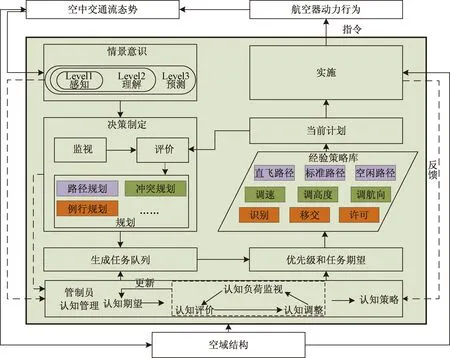
图9 广义空中交通流运行框架
(1)粒度差异化。空中交通管理是多主体、分层级的社会技术系统。广义交通流建模应面向空中交通管理差异化的时空尺度和管控精度,选择性拓展空中交通流的广义属性,如航空公司、机场等偏好行为,完善形成面向差异需求、具有不同粒度的广义空中交通流模型体系,是未来广义空中交通流建模的趋势之一。
(2)行为随机化。空中交通系统是一类典型的不确定性系统。文献[10]已经在队列网络状态转移、达到交通流分布、管制行为持续时间等模型中融入随机性变量,刻画“人-流”宏微观行为的波动性和或然性。然而,随机化的关键在于概率分布的准确性。随着空中交通数据的规模化,可以采用实证分析方法研究各类交通行为的统计特性[58],从而调节模型的不确定性和差异性参量,探索基于大数据的广义空中交通流建模,提升模型对于真实空中交通运行的表达能力,是未来广义空中交通流建模的趋势之一。
(3)“人-流”一体化。在以管制员为战术核心的空中交通流运行中,管制认知与决策模式是决定交通流时空演变的重要因素之一。管制员以循环的态势感知为输入,不断产生和更新管制期望,形成管控策略;随着策略的实施,交通流内部的微观作用推动交通流朝着期望的状态演变并反馈影响管制认知,如图8所示。显然,空中交通流是具有广义属性的一类混杂人造系统,具有宏观流体的连续性和微观模态的离散性。因此,从混杂系统的角度研究微观模态的切换机理,建立交通流宏观参量与管制认知决策的模糊映射关系,开展空中交通“人-流”一体化建模研究,是未来广义空中交通流建模的趋势之一。文献[59]以终端区交通流广义跟驰行为为切入,进行了“人-流”混合建模的有益尝试,初步探讨了终端区交通流相变特征。
(4)复杂性视角。空中交通流可视为一个由人(管制员、飞行员)、航空器和空域三要素构成的动态、开放的复杂系统。目前,空中交通流建模主要采用还原论思想,将复杂系统的高级运动降解为航空器和管制员的低级行为,以期集聚推演空中交通流时空特性及其演变规律。为深刻揭示广义空中交通流复杂特性本质,研究基于复杂性理论的“人-流”建模方法,如建立时变的“管制员-航空器”复杂网络模型[60],探索“人-流”在网络上的动力学机制,是复杂性方法论引导下广义空中交通流建模的趋势之一。
(5)未来适应性。随着“下一代航空运输系统”“单一欧洲天空”、国际民航组织航空系统组块升级计划等先进航空系统规划的推进,空中交通系统运行模式将产生重大变革。例如,从运行概念上,基于航迹的运行将从根本上转变了当前基于空域的空中交通运行方式,航空公司、机组在航班生命周期中的决策作用得以凸显,空中交通流广义属性进一步扩展;从系统设备上,随着进离场排序、间隔管理等管制辅助决策系统自动化、智能化程度进一步提升,管制认知和决策模式必将发生调整以应对人机复杂性。因此,刻画未来空中交通流广义属性及运行特征,建立适应性的广义空中交通流模型,是研究新概念和新技术变革对于空中交通系统的影响的重要方式,也是未来广义空中交通流建模的发展趋势之一。
4 结论
交通流建模是研究空中交通拥堵规律和影响机理的重要手段之一。面向空中交通流广义属性,根据建模对象的侧重程度,将当前广义空中交通流模型分为“以流为中心”和“以人为中心”的空中交通流模型两类,重点阐述了各类模型的核心思想、主要特点、关联关系和适用范围,强调了空中交通流建模中“人-流”关系的重要性;针对当前交通流建模亟需突破的瓶颈和未来空中交通发展需求,从粒度差异化、行为随机化、“人-流”一体化、复杂性视角和未来适应性5个方面提出了广义空中交通流建模的发展趋势,为开展空中交通基础理论和应用技术研究提供一定的参考借鉴。
