一种欠驱动末端执行器控制系统的设计
2020-04-21林凌张平均
林凌 张平均


摘要:本文根据仿生机理设计了一款欠驱动末端执行器,分析了欠驱动末端执行器的运动学坐标并给出了运动学模型。欠驱动末端执行器采用直流5V电源供电,并给出了该系统设计的硬件电路图和软件流程图。
关键词:欠驱动;末端执行器;设计
中图分类号:TP241 文献标识码:A 文章编号:1007-9416(2020)01-0160-01
0 引言
当前市场主流已有的末端执行器主要有两种结构形式,传统模式主要包括了各类杆件机构欠驱动机械模块组成,而近年来集中研究的热点则是较为灵便的腱传动欠驱动机械驱动模块[1,2]。腱传动欠驱动形式比较好地利用仿生生物机理(如图1所示),模拟并实现了灵长类手臂手指的肌体传动能力,本文将按此机理设计开发一款驱动末端抓取器,实现仿生机构的抓取[3]。
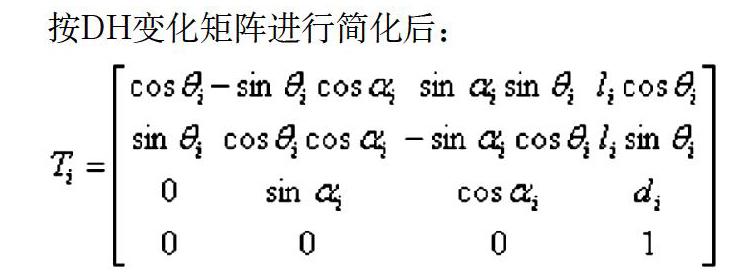
1 欠驱动末端执行器DH运动学模型
欠驱动末端执行器DH运动学坐标系如图2所示[4]。
构件1的关节角为θ1,对应的关节长度为L1,构件2的关节角为θ2,对应的关节长度为L2。
按DH变化矩阵进行简化后:
2 欠驱动末端抓取器控制系统设计
欠驱动末端执行器控制模块图3所示,欠驱动末端执行器控制面板图4所示。
控制模块与欠驱动执行器的电机机组由DC5V电源供电,控制模块与电机机组连接,ESP8266Wi-Fi模块与控制模块通过串口进行通讯,并由控制模块提供电源,其作用用于接收Wi-Fi中传递的来自PC端的控制信号,接通电源口模块即为运行状态,关闭电源后接收停止[5,6]。
3 结语
本文根据仿生机理,设计了一款欠驱动末端执行器,分析了欠驱动末端执行器的运动学坐标并给出了运动学模型。欠驱动末端执行器采用直流5V电源供电,并给出了该系统设计的硬件电路图和软件流程图。
参考文献
[1] 孙学俭,于国辉,周文乔,等.对世界工业机器人發展特点的分析[J].机器人技术与应用,2002(03):8-9.
[2] 蔡自兴.机器人学[M].北京:清华大学出版社,2009.
[3] 李明.机器人[M].上海:上海科学技术出版社,2011.
[4] 张元兴.自适应欠驱动手指机构研究[D].衡阳:南华大学,2014.
[5] 何艳涛.一种绳驱式欠驱动三指灵巧手的研究[D].哈尔滨:哈尔滨工业大学,2014.
[6] 蒋亚飞.三自由度机械手控制系统的设计与实现[D].广州:广东工业大学,2016.
