V2 恒定导通时间控制Buck 变换器稳定机理分析
2020-04-21张美健
张美健
(中建石化工程有限公司,江苏 南京 210000)
0 引 言
为了确保便携式电子设备的可靠、高效工作,为其供电的电源模块应具有快速的负载响应速度。开关变换器的传统脉冲宽度调制控制技术(如电压型控制[1]和电流型控制[2])受控制环路响应速度的限制,无法获得快速负载响应速度。相较于传统脉冲宽度调制控制技术,V2恒定导通时间控制技术具有快速的负载动态响应速度、轻载效率高等优点[3],可以满足便携式电子设备等对负载响应速度的要求,在工业界和学术界得到了广泛关注[4-6]。
然而,对于V2-COT 控制Buck 变换器,当输出电容等效串联电阻(Equivalent Series Resistance,ESR)较大时,变换器工作在稳定状态;当输出电容ESR 较小时,变换器中存在次谐波振荡现象,导致其工作在不稳定状态[4]。
为了分析V2-COT 控制Buck 变换器的稳定机理,将采用文献[7]提出的分析方法,基于扰动引起的电感电流变化和输出电容电荷变化,推导次谐波振荡现象产生的临界条件。进一步,通过建立V2-COT 控制Buck 变换器的分段线性模型,通过分岔图分析变换器的稳定机理。
1 V2-COT 控制 Buck 变换器
1.1 工作原理
V2-COT 控制Buck 变换器的原理图和主要稳态工作波形如图1 所示。从图1 可以看出,输出电压纹波与误差放大器输出的误差信号vc进行比较产生触发信号,并与导通定时器(On Timer)通过RS 触发器实现对开关管S 的控制。图1 中,误差信号vc为:


图1 V2-COT 控制Buck 变换器
如图1(b)所示,当输出电压vo下降到误差信号vc时,RS 触发器被置位,开关管S 导通,输出电压vo上升,同时导通定时器开始定时。经过恒定导通时间TON后,导通定时器复位RS 触发器,S 关断,vo下降。当vo再次下降到vc时,S 再次导通,进入下一个开关周期。
1.2 仿真分析
设计图1 中各电路参数如表1 所示,以输出电容ESRr为可变参数,利用PSIM 软件进行电路仿真。
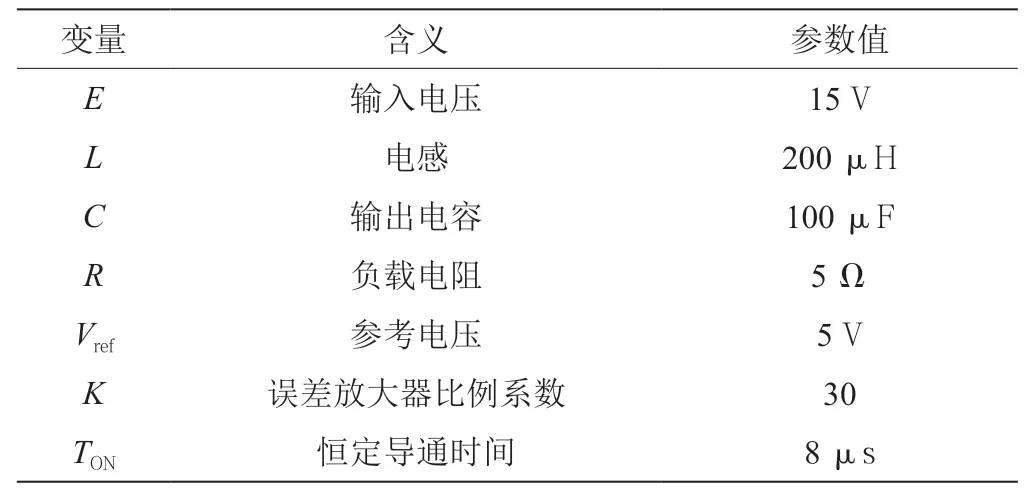
表1 V2-COT 控制Buck 变换器的电路参数
图2 为不同 ESR 时 V2-COT 控制 Buck 变换器的输出电压vo、电感电流i和驱动脉冲电压VS的时域波形的仿真结果。如图2(a)所示,当r=30 mΩ 时,Buck 变换器工作在不稳定的次谐波振荡状态,具有较大的输出电压和电感电流的纹波;如图2(b)所示,当r=100 mΩ 时,Buck 变换器工作在稳定的周期1 状态,具有较小的输出电压和电感电流的纹波。由此可见,当输出电容的ESR 较小时,V2-COT 控制Buck 变换器将出现不稳定的次谐波振荡现象。
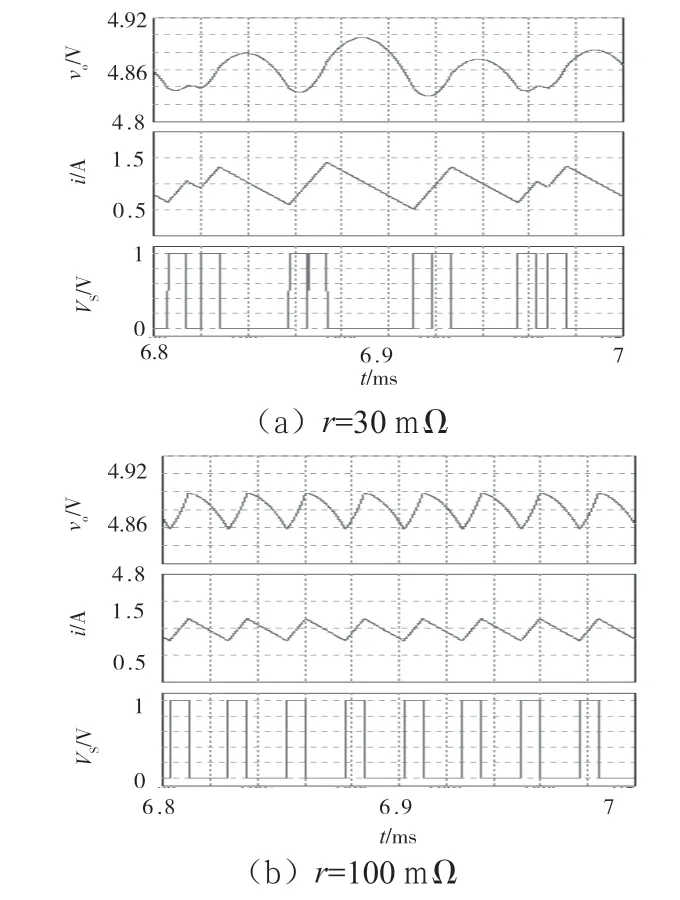
图2 不同ESR 时的仿真结果
1.3 仿真分析
基于扰动引起的电感电流变化和输出电容电荷变化[7],分析V2-COT 控制Buck 变换器存在的次谐波振荡现象,并导出产生次谐波振荡的临界输出电容ESR 值。
图3 为次谐波振荡分析波形示意图,给出了第n-1个开关周期、第n个开关周期和第n+1 个开关周期的电感电流i、输出电压vo、误差信号vc和驱动脉冲电压VS的波形。此外,ΔI为稳态时电感电流的峰-峰值,Io为稳态时输出电流。当输出电压纹波相对于其稳态量可忽略不计时,电感电流的上升斜率m1和下降斜率m2可看作恒定值。t0~t4表示第n个开关周期的5 个关键时刻,其中t0和t4分别为第n个开关周期的起始时刻和结束时刻。

图3 次谐波振荡分析波形示意图
加入扰动后,第n-1个开关周期结束时刻即t0时刻,电感电流的偏差量为ΔIn-1。由于电感电流上升斜率和导通时间恒定,故在t2时刻,电感电流的偏差量也为ΔIn-1。以此类推,在t4和t5时刻,电感电流偏差量均为ΔIn。由于开关频率远大于变换器LC 滤波网络的本征频率,故可以认为电感电流纹波完全流入输出电容所在支路。由此可知,电感电流的变化量将全部用于引起输出电容电荷量的变化,如图3中的阴影部分所示。
在t0~t4时间段即第n个开关周期内,图3 中各阴影部分对应的电荷变化量分别为:

在输出电容支路引起的电压变化量即输出电压变化量为:

进一步,电压误差信号的变化量为:

由图3 可以看出,在t0时刻和t4时刻,有vo=vc。由此可知,第n个开关周期内输出电压变化量等于电压误差信号变化量,即Δvo=Δvc。联立式(5)和式(6),有:

其中K为正整数,故式(7)可化简为:

图3 中,m1、m2、TON、Io和 ΔI为定值,若已知ΔIn-1,即可确定ΔQ1和ΔQ2。为了消除扰动引起的偏差,应使ΔIn<ΔIn-1。由图3 可以看出,若ΔIn减小,ΔQ3将增大,进而式(8)的左边将增大,这样就要求输出电容ESR 值增大,即增大输出电容ESR 值可以消除扰动引起的偏差。由此可知,ΔIn=ΔIn-1为其临界条件,联立式(2)~式(4)和式(8),并考虑ΔI=m1·TON,有:

对第n+1 个开关周期进行相应的分析可以得到相同的结果,此处将不再赘述。
由以上分析可知,当输出电容ESR 值小于TON/2C时,V2-COT 控制Buck 变换器产生次谐波振荡现象;当输出电容ESR 值大于TON/2C时,次谐波振荡消失。因此,式(9)为消除次谐波振荡的临界条件,这与文献[4]所得结论一致。
2 稳定机理分析
当Buck 变换器工作于CCM 时,根据开关管S 和二极管D 的开关状态,Buck 变换器将在两个线性拓扑间不断切换。
S 导通、D 截止时,对应的状态方程为:

S 关断、D 导通时,对应的状态方程为:

以输出电容ESR 为可变参数,其他电路参数如表1 所示,V2-COT 控制Buck 变换器的分岔图如图4 所示。

图4 随输出电容ESR 变化的分岔图
图4 中,输出电容ESR 的变化范围为[30 mΩ,41 mΩ]。当输出电容ESR 值较大时,V2-COT 控制Buck 变换器工作在稳定的周期1 状态;随着输出电容ESR 值的不断减小,大约在r=38.53 mΩ 处,Buck 变换器的运行轨道经历了一次倍周期分岔,进入到周期2 状态。经短暂的周期2 状态,随着输出电容ESR 值的进一步减小,Buck 变换器的运行轨道进入到由次谐波振荡引发的混沌状态。由此可知,随着输出电容ESR 的减小,倍周期分岔导致V2-COT 控制Buck 变换器失稳。
3 实验验证
搭建V2-COT 控制Buck 变换器的实际电路,采用表1 的电路参数。不同输出电容ESR 值时,输出电压纹波Δvo、电感电流i和驱动脉冲电压VS的实验波形如图5 所示。如图5(a)所示为r=30 mΩ <TON/2C时,V2-COT 控制Buck 变换器工作在不稳定的次谐波振荡状态;如图5(b)所示为r=100 mΩ >TON/2C时,V2-COT 控制Buck 变换器工作在稳定的周期1 状态。实验结果与仿真结果基本一致,验证了仿真分析和理论分析的正确性。

图5 不同ESR 时的实验结果
4 结 论
V2-COT 控制技术广泛应用于各种便携电子设备、微处理器的VRM 中,然而当输出电容ESR 值较小时,V2-COT 控制Buck 变换器往往工作在不稳定的次谐波振荡状态,使VRM 无法正常工作。基于扰动引起的电感电流变化和输出电容电荷变化,导出次谐波振荡产生的临界输出电容ESR 值,进一步建立了V2-COT 控制Buck 变换器的分段线性模型,利用分岔方法,详细阐述了V2-COT 控制Buck 变换器产生次谐波振荡的动力学机理,得出倍周期分岔失稳是其根本原因,可为更好地消除该不稳定现象提供理论依据。
