基于熵权-FCM的区域管制席亚健康状态划分方法
2020-04-20岳仁田赵嶷飞
岳仁田,韩 娜,赵嶷飞
(中国民航大学空中交通管理学院,天津 300300)
近几年随着空中交通流量的迅猛增长,民航空域接近饱和,管制员工作趋向超负荷状态,此时管制员发出的指令容易发生错忘漏现象,管制工作趋于亚健康状态。而如何对区域管制席亚健康状态进行合理划分将是管制运行系统采取合理管控措施的基础,对缓解管制员工作负荷和疲劳具有重要的意义。目前针对管制员工作负荷和空管安全运行评估方面已有大量的研究,如靳慧斌等[1]基于视觉观察和语音通话,提出对应的交互指标对管制员工作负荷进行实时测量;高伟等[2]基于加权灰色关联度方法,建立了管制员工作负荷影响因素评价模型;温瑞英等[3]基于空中交通的复杂性,提出了岭回归-BP神经网络模型用来预测管制员的工作负荷;赵嶷飞等[4]结合集对分析方法和物元可拓理论,构建了管制运行风险评价模型对某管制单位运行风险进行评价;廖勇等[5]建立了一种基于Bayes分析的空管安全概率评估方法;Jacek[6]运用模糊风险矩阵评估了空中交通事故发生的可能性;Li等[7]利用事故树方法分析了ATC自动化系统升级过渡过程中的安全风险;张兆宁等[8]建立了熵流模型,利用系统熵变分析了进近管制系统风险性变化的趋势;王洁宁等[9]利用系统性事故理论分析方法(STPA),识别了管制员潜在的不安全行为,并建立了不安全行为约束的形式化表达式;Micha等[10]依据人为因素分析和分类系统(HFACS),提出了STAMP-HFACS图,减少了STAMP的误分类率。另外,在空管运行亚健康理论方面,岳仁田等[11]建立了可接受空中交通流不均衡度(AATFID)模型,首次从管制员工作负荷角度描述了管制运行系统亚健康状态[12],并从人员、设备、环境、管理和运行5个角度构建了空管运行亚健康状态评估指标体系,建立了空管运行亚健康状态灰色层次评价模型[13]。
由于区域管制席亚健康状态的特性具有模糊性和不确定性,可能会发展为健康状态或故障状态。而聚类分析作为一种无监督学习算法,能够在没有任何先验知识的情况下实现数据集的特征划分。聚类算法在分类的过程中,不必事先给出一个分类的标准,能够从样本数据出发,自动进行分类。模糊C均值聚类(FCM)算法[14]使用模糊逻辑和模糊集合论的概念,提出一种不需硬性地将对象指派到一个簇中的聚类算法,为每个对象和每个簇赋予一个隶属度,指明该对象属于该簇的程度。但考虑到空中交通流具有时空不均衡性质[11],若将各亚健康状态评价指标同等对待,区域管制席亚健康状态划分结果会存在较大的误差。因此,为了提高区域管制席亚健康状态划分的准确性,本文基于管制员工作负荷选取5项评价指标,针对各评价指标对区域管制席亚健康状态的影响程度不同,先利用熵权法对区域管制席亚健康状态评价指标进行赋权,然后根据区域管制员在北京部分扇区的练习数据,运用基于熵权的模糊C均值聚类(EW-FCM)算法对其进行聚类划分,最后通过实例仿真验证了本文提出的基于熵权-FCM的区域管制席亚健康状态划分方法的有效性。
1 FCM算法原理
模糊C均值聚类(FCM)算法是一种实行模糊伪划分的软聚类方法,通过迭代使样本距离模糊聚类中心的距离加权和最小。若一个数据集为X={x1,x2,…,xn},每个样本xi有m个评价指标,即xi={xi1,xi2,…,xim},样本集X的一个子集为模糊簇集V1,V2,…,Vc。FCM算法的目标函数为
(1)

(dij)2=‖xj-vi‖2=(xj-vi)T(xj-vi)
(2)
式中:vi为第i个聚类中心,其计算公式见下文。
FCM算法的具体步骤如下:
(1) 选择聚类数目c,设置模糊指数q、迭代终止阈值ε和最大迭代次数T,随机初始化隶属度uij。
(2) 计算模糊聚类中心,其具体计算公式为
(3)
(3) 更新模糊伪划分,计算聚类隶属度矩阵,其计算公式为
(4)
(4) 重复计算每个聚类中心和隶属度矩阵,直至划分结果达到稳定状态(终止迭代条件:“如果误差的变化低于指定的阈值”或“如果所有的隶属度变化的绝对值都低于指定的阈值”)。
2 基于EW-FCM的区域管制席亚健康状态划分方法
2.1 EW-FCM算法
熵是度量系统无序程度的测度,熵值越大,系统的无序程度越高,提供的信息就越少[15]。每个评价指标权重的熵值体现了该指标在区域管制席亚健康状态划分中提供有用信息的多少,反映出各评价指标的相对重要性。故本文计算亚健康状态评价指标权重的步骤如下:
(1) 构建数据矩阵X。若有m组管制运行数据,每组数据有n个亚健康状态评价指标,则构建数据矩阵X:
X=(xij)m×n(i=1,2,…,m;j=1,2,…,n)
(5)
(2) 对数据矩阵X进行归一化处理。为了解决各亚健康状态评价指标量纲不同的问题,需对数据矩阵X进行归一化处理,其计算公式为
(6)
(3) 计算各亚健康状态评价指标的熵值。各亚健康状态评价指标j熵值的计算公式为
(7)
(4) 计算各亚健康状态评价指标的熵差异系数。亚健康状态评价指标j的熵差异系数计算公式为
dj=1-Ej(j=1,2,…,n)
(8)
(5) 计算各亚健康状态评价指标的权重。用熵测度来表示第j个亚健康状态评价指标的权重系数,其计算公式为
(9)
根据上述熵权法步骤对各亚健康状态评价指标赋权后,利用计算的误差平方和来确定每组样本数据与聚类中心间距的最小值。改进的模糊C均值聚类(EW-FCM)算法的目标函数为
(10)

(11)
式中:w={w1,w2,…,wt},wk∈[0,1],为亚健康状态评价指标的权值;t为亚健康状态评价指标的个数,取t=5。
2.2 EW-FCM算法的实现步骤
EW-FCM算法的实现步骤如下:
(1) 依据熵权法计算出各亚健康状态评价指标的权重W={w1,w2,w3,w4,w5},将其代入公式(11)计算加权欧氏距离。
(2) 根据区域管制席的练习数据特征,设置模糊指数q、迭代终止阈值ε和最大迭代次数T。
(5) 当收敛精度达到ε,算法终止;否则,返回步骤(3),继续迭代计算V、U。
2.3 改进前后的FCM算法评价
为了评估模糊聚类算法的有效性,选择划分系数PC[16]、划分熵系数PE[16]、改进的划分系数MPC[16]、目标函数值和迭代次数对改进前后的FCM算法的聚类效果进行对比分析。
(1) 划分系数PC的计算公式如下:
(12)
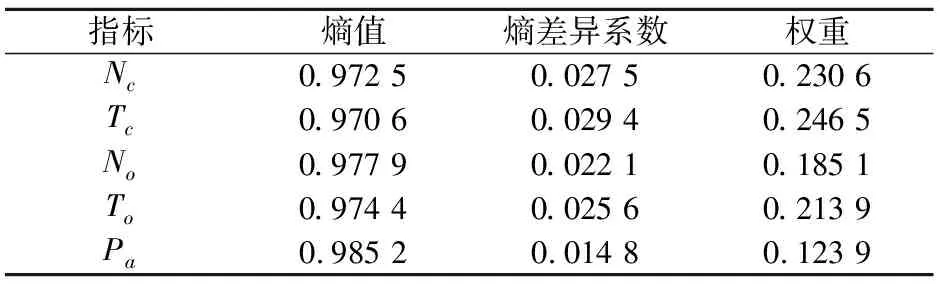
式中:c为聚类中心的个数;n为模糊聚类的样本数量。当1 (2) 划分熵系数PE的计算公式如下: (13) PE的取值范围为[0,logc],若结果越接近0,聚类划分越清晰;若结果越接近logc,聚类划分越模糊。 (3) 采用改进的划分系数MPC对PC和PE的单调倾向进行了优化,其计算公式如下: (14) (4) 目标函数值和迭代次数:FCM算法的目标函数是某样本的隶属度与该样本到各亚健康状态聚类中心距离的乘积,可以用来衡量聚类中心是否能准确表示各亚健康状态中心的指标,若聚类算法的目标函数值越小,则聚类中心更能代表各亚健康状态的中心。迭代次数是聚类算法计算样本数据隶属度和亚健康状态聚类中心的运行次数,迭代次数越少,表明聚类算法的收敛性越好。 本文以区域管制员在北京部分扇区的练习数据为样本数据,样本数据采集间隔为3 min,共100组,每组样本数据包括亚健康状态划分的5个评价指标[9],依次为通话次数(Nc,次)、通话时间(Tc,s)、设备操作次数(No,次)、设备操作时间(To,s)、同时监管的飞机峰值架次(Pa,架次)。在样本数据预处理过程中需依据熵权法计算亚健康状态评价指标的权重,再利用FCM算法和EW-FCM算法得到区域管制席亚健康状态划分结果。而数据的归一化处理是熵权法必不可少的步骤,其可以提升FCM算法聚类的准确性。因此,本文在对样本数据预处理过程中,对100组样本数据进行了标准化处理,再利用熵权法计算区域管制席亚健康状态评价指标的权重,其计算结果见表1。 表1 基于熵权法的区域管制席亚健康状态评价指标权重 由表1可知,区域管制席亚健康状态评价指标的权重向量为W={w1,w2,w3,w4,w5}={0.230 6,0.246 5,0.185 1,0.213 9,0.123 9},管制员通话的两项指标反映出的信息量均大于设备操作的两项指标,而同时监管的飞机峰值架次反映出的信息量最小。这也进一步说明了熵权法在EW-FCM算法中具有良好的适用性。 根据样本数据的性质,FCM算法仿真中采用MATLAB默认模糊指数q=2、迭代终止阈值ε=1.0×10-6和最大迭代次数T=100。由于FCM算法聚类的优劣与选取的簇数有关,若选取的聚类簇数量太少,不能反映不同区域管制席亚健康状态的区别;若选取的聚类簇数量太多,不能表现区域管制席亚健康状态的聚类效果。因此,根据区域管制席亚健康状态的特性,按照经验设置聚类数目c=3。FCM算法和EW-FCM算法的有效性指标计算结果,见表2。 表2 改进前后的FCM算法的有效性指标 注:表中加粗数据值所对应的算法较优。 由表2可知,EW-FCM算法的划分系数PC、划分熵系数PE、改进的划分系数MPC均比FCM算法更优,直接表明EW-FCM算法比传统FCM算法的聚类效果更为理想。 为了验证EW-FCM算法的有效性,计算了样本数据的目标函数值和迭代次数,其计算结果见图1。 图1 改进前后的FCM算法目标函数值变化曲线Fig.1 Variation curves of objective function value of FCM algorithm before and after improvement 由图1可见,在首次迭代时,EW-FCM算法的目标函数值(约为7)远远小于FCM算法的目标函数值(约为200),这是由于使用熵权法对亚健康状态评价指标赋予了不同的权重,而传统的FCM算法中每个指标的权重都是1,因此首次迭代计算的目标函数值大大降低,所得的聚类中心能更好地表示区域管制席亚健康状态的中心,这提升了最终目标函数值和聚类中心的迭代效率;在迭代过程中,两种聚类算法的目标函数值都在持续减小,但EW-FCM算法达到目标函数最小值的迭代次数(12次)小于FCM算法达到目标函数最小值的迭代次数(18次);在迭代结束时,EW-FCM算法的目标函数最小值(约为5.2)远远小于FCM算法的目标函数最小值(约为155)。改进前后的FCM算法聚类效果对比结果表明:EW-FCM算法相较于FCM算法,在较少的迭代次数下达到了更小的目标函数值,且收敛效率和收敛性能均有所提高。 根据EW-FCM算法的聚类结果,分三组计算区域管制席亚健康状态评价指标的均值,并统计各类管制练习数据的数量,见表3。 表3 区域管制席亚健康状态评价指标的均值 注:表中加粗数据值表示明显大于样本数据均值。 由表3可以看出: (1) Ⅰ 类管制数据的各项评价指标均值均小于样本数据,此类练习数据表示出区域管制工作负荷量较小,管制员能够很轻松地完成管制任务,此时管制运行席位处于健康状态。 (2) Ⅱ 类管制数据中前两项的通话指标均值和同时监管的飞机峰值架次指标均值远大于样本数据,设备操作的两项指标均值小于样本数据,此时管制员同时监管的飞机峰值架次过多,通话工作负荷较重,发出的指令较多且复杂,将此类管制运行席位标定为通话亚健康状态。 (3) Ⅲ类管制数据中设备操作的两项指标均值均大于样本数据,其他3项评价指标均值约等于样本数据,此时管制员设备操作负荷较重,相比Ⅱ类的通话亚健康状态,将此类管制运行席位标定为设备操作亚健康状态。 通过统计分析,100组练习数据中有35%处于健康状态,分别有26%和39%处于通话亚健康状态和设备操作亚健康状态,样本数据集中只有1/3的练习数据处于健康状态,直接表明区域管制练习整体上呈现一种亚健康趋势,这与北京扇区的航线密集和空域复杂导致的管制工作量剧增有必然的联系。 文献[11]将管制运行状态划分为健康状态和亚健康状态(包含管制运行稳定亚健康状态和不稳定亚健康状态),而在本文中将区域管制席亚健康状态划分为健康状态、通话亚健康状态和设备操作亚健康状态,从成因角度划分了区域管制席亚健康状态。若区域管制席处于健康状态时,管制员能高效率地完成管制工作任务,交通服务水平良好,则适宜安排在交通流量高的时段执勤;若区域管制席处于通话亚健康状态时,管制员同时监管的飞机峰值架次过多,导致其在管制信息收集与决策过程中,不能发出简洁、准确的指令,指挥能力逐渐下降,则不适宜安排在管制任务繁忙的时段工作;若区域管制席处于设备操作亚健康状态时,管制员对各种管制设备的操作能力较弱,则可以使用雷达管制模拟机勤加练习,提升设备操作的熟练程度。 根据成因角度划分区域管制席亚健康状态,可以及时地掌握管制运行的健康程度。若区域管制席长期处于某种亚健康状态,会造成管制员持续超负荷工作,出现精神疲劳和心理疲劳等现象,则极有可能发生指挥失误、危险接近等不安全事件。所以,应当及早对区域管制席亚健康状态进行识别,并采取合理的控制和诱导措施,保障管制运行工作的安全、有效运行。 通过区域管制席亚健康状态划分可以全面地掌握ATC的运行情况,有助于管制运行潜在性风险的预判,是及时采取交通管控和诱导措施的前提。本文利用熵权法对区域管制席亚健康状态评价指标进行赋权,将传统的欧氏距离改进为带权重的欧氏距离,并基于北京部分扇区的练习数据,得到5项亚健康状态评价指标,其中关于陆空通话的两项指标对区域管制席亚健康状态划分的影响最大。通过实例仿真结果表明:本文的EW-FCM算法相较传统的FCM算法,能对区域管制席亚健康状态进行合理有效的划分,且收敛性能较好。未来研究可加入管制任务中的思考工作负荷量,对区域管制席亚健康状态进行深入分析。此外,研究区域管制席在亚健康状态下的交通流时空分布特性,对管制空域的扇区容量设定具有一定的参考意义。3 实例仿真分析
3.1 数据采集
3.2 改进前后的FCM算法聚类效果对比


3.3 结果分析

4 结论与建议
