无人机低空滑翔抗攻击突防控制律优化设计
2020-04-15陆兴华邱子琪曾凌锋
陆兴华,明 仲,邱子琪,曾凌锋
(广东工业大学华立学院,广东 广州 511325)
0 引 言
无人机是利用遥控和程序指令进行飞行指令传输和导航的飞行器,随着无人机控制技术的成熟,无人机的飞行稳定性越来越高,在军事领域,无人机可以实现全天候全地域的低空侦察和军事打击。无人机在低空滑翔飞行中,容易受到地方的防空武器攻击,需要对无人机低空滑翔段进行抗攻击控制,提高无人机的生存能力[1]。
无人机在低空滑翔过程中,容易受到地面和控制的干扰和拦截,结合小扰动抑制方法进行无人机滑翔抗攻击突防控制。传统方法中,对无人机低空滑翔抗攻击突防控制方法主要有模糊控制、积分控制、PID控制方法等[2-3],采用严格反馈控制方法进行无人机的末端位姿修正,实现突防控制,提高无人机的飞行控制能力。文献[4]中提出一种基于PID神经网络控制的无人机低空滑翔抗攻击突防控制,进行姿态参数调节,提高控制过程的鲁棒性,但该方法进行飞行控制的抗小扰动性不好;文献[5]中提出一种基于比例-积分控制器的无人机低空传感定位控制方法,通过纠偏量自适应反馈调节方法提高无人机的自动定位效果,提高姿态修正能力,但该方法进行无人机低空突防控制的鲁棒性不好,姿态参数修正的准确性不高。
针对上述问题,文中提出一种基于快速模型预测的无人机低空滑翔抗攻击突防控制技术。首先采用融合传感识别技术进行无人机的姿态和位置参数信息采集,分析无人机的低空滑翔控制的物理环境参数模型,然后构建无人机飞行轨迹地图模型,使用标准卡尔曼滤波器进行无人机低空滑翔抗攻击突防控制信息的融合处理,根据信息融合结果进行控制指令设计,根据无人机低空突防段的初始位姿参数进行快速模型预测和飞行轨迹跟踪,实现低空滑翔抗攻击突防控制。最后进行仿真实验分析,展示了该方法在提高无人机低空滑翔抗攻击突防控制能力方面的优越性能。
1 模型建立和约束参量分析
1.1 无人机低空滑翔抗攻击突防控制模型建立
采用融合传感识别技术进行无人机的姿态和位置参数信息采集,分析无人机的低空滑翔控制的物理环境参数模型,构建无人机低空突防滑翔控制的轨迹分布地图[6],得到无人机低空滑翔抗攻击突防控制的轨迹跟踪分布模型,如图1所示。

Co(x*)<0
(1)
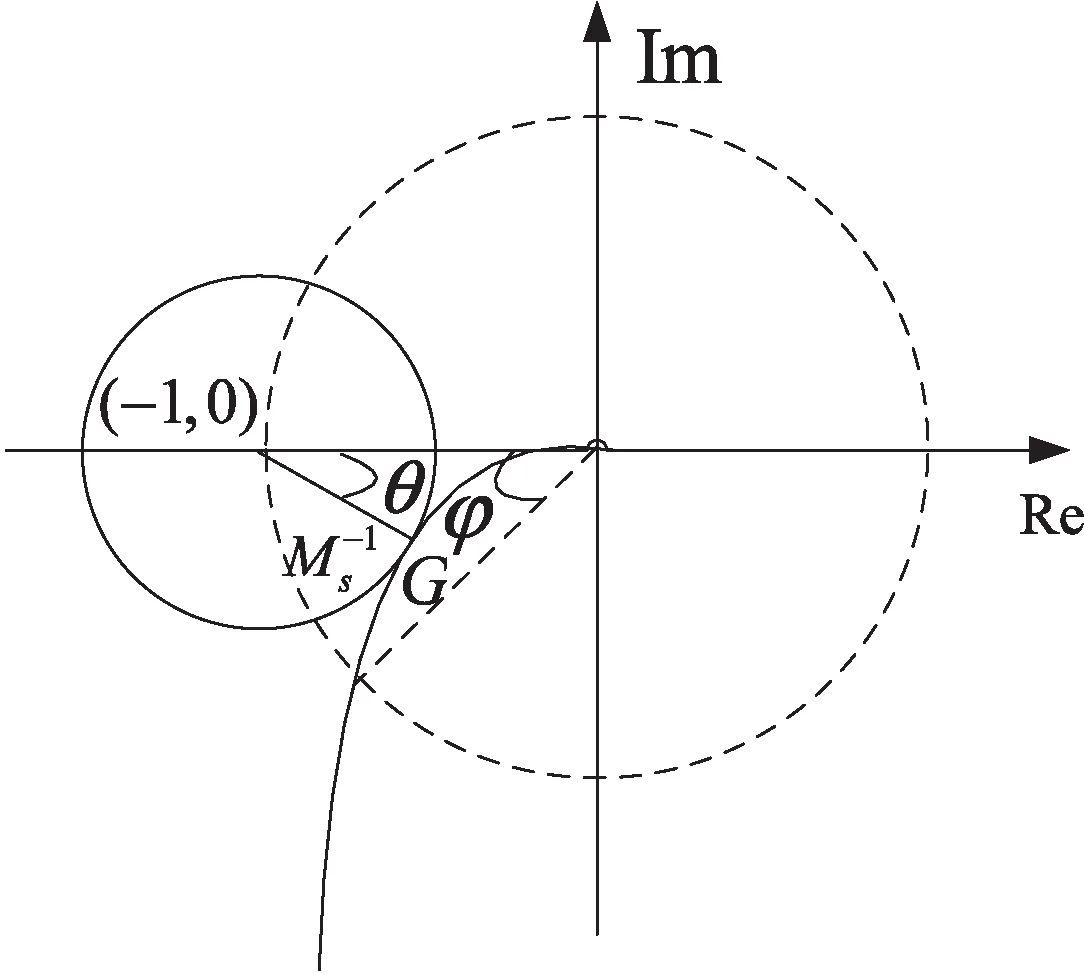
图1 无人机低空滑翔抗攻击突防控制的
将无人机低空突防的飞行轨迹跟踪问题转换为多目标优化问题[7],求得无人机的逆运动学模型的最小特征为:
(2)
设无人机处于180o经线两侧轨迹的矢量分布集Q为Rm处的任意q点的集合,表示无人机传感减速器转动惯量,矢量模型为d1,d2,…,dq。如果Co(x*)=0,则空间位置纠偏误差满足:
Y(P,Q,β)=Y[red(P,Q,β),Q,β]
(3)
无人机飞行的向心力与科氏力项的反馈调节函数为:
(4)
令F为重力项和柔性元件的二元控制函数,ω为自适应调节系数,采用最小二自由度寻优进行突防轨迹的起始值与目标值的最优轨迹搜索,提高无人机低空滑翔抗攻击能力[8]。
1.2 无人机飞行轨迹跟踪的控制约束参量分析
在分析无人机的定位物理环境参数模型的基础上,构建无人机低空滑翔抗攻击规划的GPS轨迹地图[9],无人机低空滑翔抗攻击突防控制的闭环传递函数H2和H3共同标记为x,以阻尼力矩参量为约束指标进行无人机低空滑翔抗攻击突防控制约束参量的自适应寻优[10],根据无人机的当前位置,计算出无人机的运动状态空间估计无迹卡尔曼滤波函数为:

(5)
其中,aij为动态运动基元的时滞参量。
在凸优化条件下,采用动态基元轨迹跟踪方法,得到无人机低空突防控制的滑模面方程:
(6)
取有限状态空间中的时滞函数:
(7)
在有限Morrey空间内采用串联弹性驱动控制方法求得在控制约束参量分布模型I×IR4上的最优解,且α,β∈R。此外,采用大增益模糊控制方法,得到电机端惯量控制的约束不等式:
(8)

(9)

2 控制律优化设计
2.1 无人机低空滑翔抗攻击突防控制信息融合处理

(10)
其中,e=x1-x1d=[e1,e2,…,em]T。
那么在卡尔曼增益调节下,无人机低空滑翔抗攻击控制的洛朗级数展开为:
σ(X,t)=CE-CP(t)
(11)

σ(X,0)=E(0)-CP(0) =
(12)
在姿态转移条件下,无人机滑翔动力学平衡点为:
(13)
求得线性自抗扰的偏航控制的稀疏矩阵β=(β1,…,βm)T∈GF(2n)m,在收敛性条件下得到线性自抗扰控制约束项为n=1,2,3,…,x∈[0,1],μ∈[0,4]。

e=x2-x1
(14)
其中,e=[eV,eh,ew],由此得到无人机低空滑翔抗攻击突防控制信息融合误差输出为:


(15)

根据上述分析,实现无人机低空滑翔抗攻击突防控制信息融合处理,结合Kalman滤波算法进行飞行姿态参数调节,提供无人机的抗攻击控制能力[13]。
2.2 控制律及稳定性分析
根据信息融合结果进行控制指令设计,根据无人机低空突防段的初始位姿参数构建姿态参量的快速预测模型为:
如果f(x1,x2)已知,考虑到飞行器的小角度运动,采用线性预测模型得到飞行姿态参数角解算的唯一解为:
u*=-kceV-f(x1,x2)
(17)
其中,kc为机体坐标系下的控制律输出增益,在有限时间域内,以偏航角速度为约束指标参量,得到控制误差满足:
(18)
若设eV=0,结合偏航角的估计值构建无人机低空突防的一阶离散控制系统[14],得pi(t)(i=1,2,3),控制增益的表达式如下:
(19)
基于Lipschitz连续正则的泛函,初始位姿参数模型预测值为:
计算上述方程组的周期解,得到低空滑翔抗攻击突防控制的雅克比矩阵为:
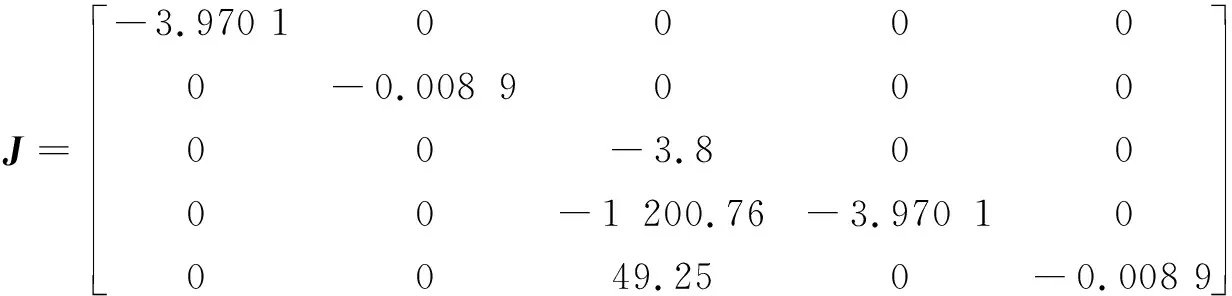
(21)
根据Lyapunov稳定性原理,得到输出的周期解的特征值全部落在凸优化平面上,说明设计的基于快速模型预测的无人机低空滑翔抗攻击突防控制律是稳定收敛的[15]。
3 仿真实验分析
为了测试该方法在实现无人机低空滑翔抗攻击突防控制中的应用性能,进行了仿真实验。实验采用Matlab 设计,对无人机飞行参数数据采集传感器为LSM30300,取无力矩驱动控制控制参数q=4,b2=b-2=1,b1=b-1=2,b0=0,设定无人机低空滑翔的高度为100 m,无人机飞行纵向运动速度220 m/s,直航段的偏航角为ψ=0.35 rad/s,自适应调节参数ε1=0.25,对无人机低空滑翔拦截的分布方位角分别为10°和30°,其他仿真参数设定见表1。
根据上述仿真环境和参数设定,进行无人机低空滑翔抗攻击突防控制,得到无人机的偏航角速率,如图2所示。
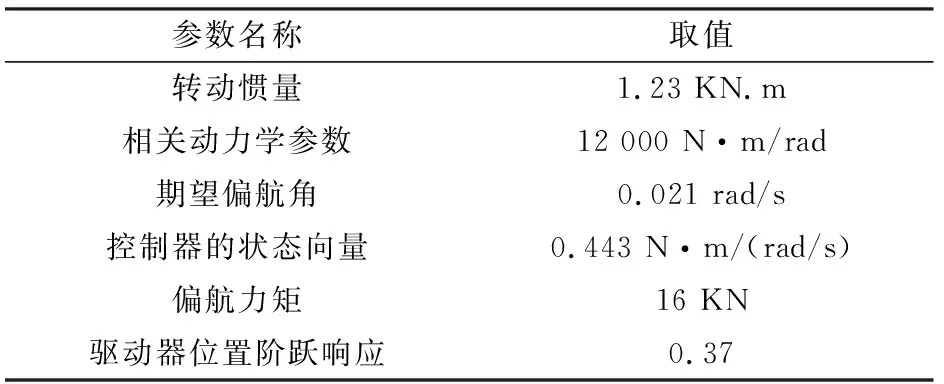
表1 仿真参数设定
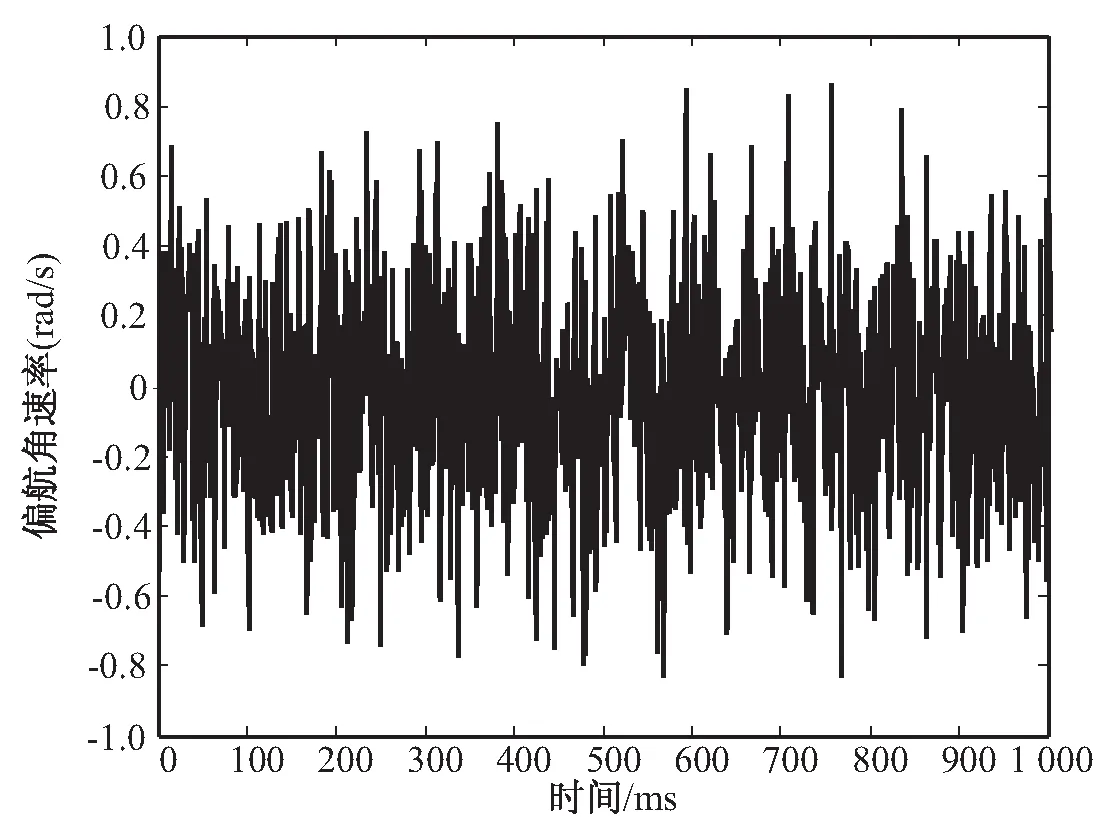
图2 偏航角速率
以图2采集的数据为测试对象,构建无人机飞行轨迹地图模型,使用标准卡尔曼滤波器进行无人机低空滑翔抗攻击突防控制信息的融合处理,实现无人机低空抗攻击突防控制,得到最优的偏航角和俯仰角解算结果,如图3所示。
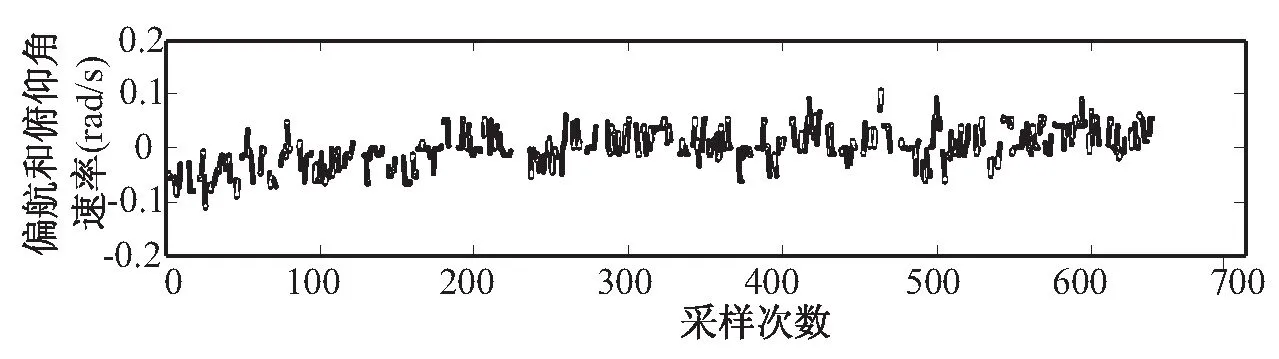
图3 最优的偏航角和俯仰角解算结果
根据姿态参数解算结果实现无人机的位姿参数快速预测,实现飞行轨迹优化跟踪设计,得到轨迹跟踪结果,如图4所示。
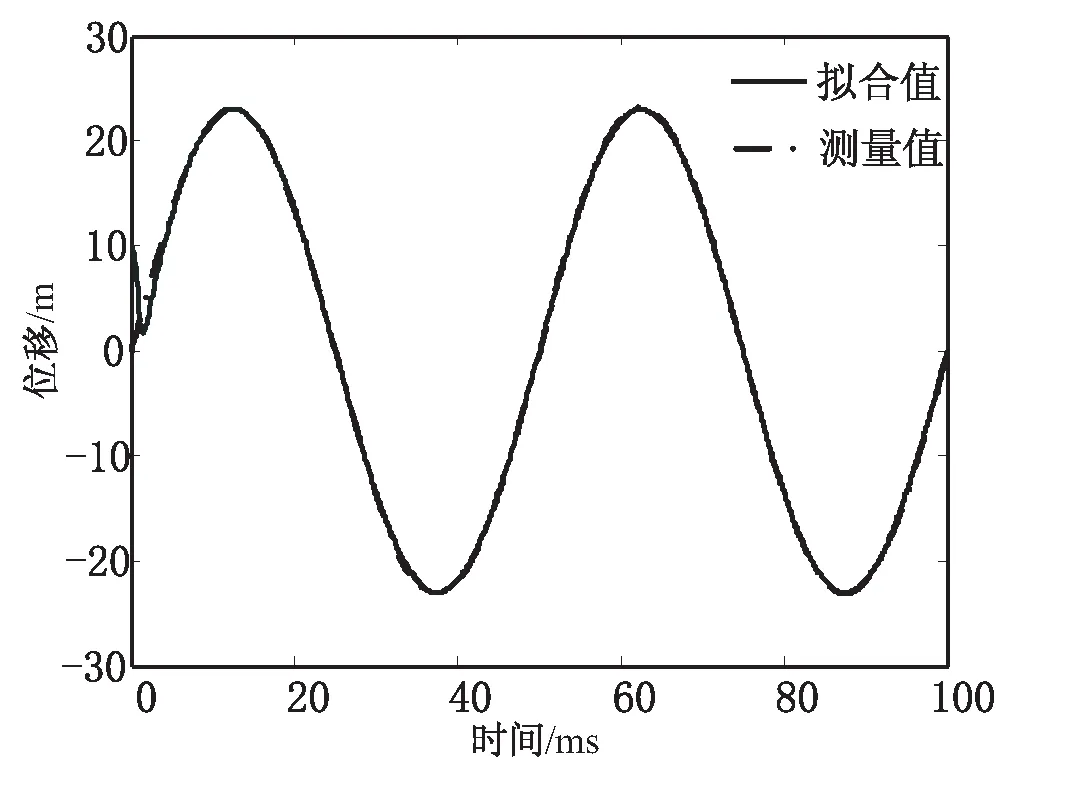
图4 轨迹跟踪结果
分析图4得知,该方法具有很好的无人机低空突防段轨迹跟踪性能,参数拟合性较好,实现了低空滑翔抗攻击突防控制。以最小均方根误差为测试指标分析控制性能,得到的对比结果见表2。分析表2得知,该方法进行无人机控制的姿态参量解算的均方根误差较低,控制精度较高。
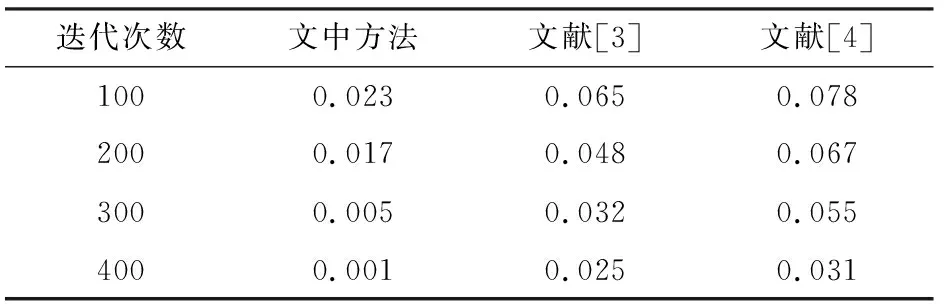
表2 最小均方根误差
4 结束语
无人机在低空滑翔飞行中,容易受到地方的防空武器攻击,需要对无人机低空滑翔段进行抗攻击控制。文中研究了一种基于快速模型预测的无人机低空滑翔抗攻击突防控制模型,进行控制律的优化设计。考虑到飞行器的小角度运动,采用线性预测模型得到飞行姿态参数角解算结果,结合偏航角的估计值构建无人机低空突防的一阶离散控制系统,采用Lyapunov稳定
性原理进行控制律稳定性分析。该方法解决了无人机低空滑翔中的抗攻击突防控制问题,提高了控制稳定性和轨迹跟踪的准确性,姿态参数解算结果准确,提高了飞行抗攻击能力和无人机的生存能力。
