潜艇水动力噪声对声呐声基阵影响分析
2020-04-10刘明星许欣然夏铁坚
刘明星 许欣然 夏铁坚
(声纳技术重点实验室 第七一五研究所, 杭州, 310023)
随着潜艇的航速逐渐提高,潜艇在高速航行过程中声呐导流罩受到较大的来流压力,导致声呐罩外壁面产生湍流脉动压力引起结构振动,从而在内部基阵区域产生水动力噪声。水动力噪声的辐射声功率与航速的6~7次方成正比[1],该噪声在中高航速下是声呐基阵区域自噪声的主要成分[2]。准确描述声呐基阵区域的水动力噪声特征,是提高声呐的工作效率和降低基阵区域综合噪声的重要技术基础和依据。对于存在固体边界的运动模型来说,其运动的外壁面上主要存在两种不一样的声源:一种是偶极子声源,主要与外壁面上的脉动压力有关,这是内部产生水动力噪声的主要来源;另一种是四极子声源,主要是由流场中的湍流漩涡运动以及发生的动量能量交换有关,这是内部产生流噪声的主要来源,湍流脉动直接辐射产生的噪声比脉动压力产生的水动力噪声至少低20 dB[3]。舰艇航行都属于低马赫数运动,因此舰艇表面的湍流边界层内四级子声源引发的流噪声可以忽略不计,声呐导流罩内的自噪声以湍流脉动压力引起振动辐射噪声为主[4]。
高航速条件下,由于自噪声增加导致声呐接收信号的信噪比降低,使得潜艇的探测性能急剧下降,故有必要进一步分析潜艇的自噪声特性,为保障高航速下潜艇探测性能提供技术支撑。一般来说,基阵自噪声主要包括机械噪声、水动力噪声以及螺旋桨噪声三种类型。近年来,针对舰艇的机械噪声已经提出了许多有效的减振降噪方法,而对于水动力噪声的研究起初仅限于简化的模型。Dowell等人[5-7]建立了弹性平板激励下的矩形腔声呐自噪声模型;刘孝斌[8]等人通过理论的模态法求解腔体内自噪声的结果与水槽中的腔体自噪声测试结果趋势大致吻合。魏建辉[9]提出了半解析半实验方法来计算圆柱壳体的水动力噪声,对于复杂模型俞孟萨等[10]通过建立统计能量法划分子系统来预报自噪声水平。孟堃宇[11]分析了潜艇附近的流噪声指向性分布情况。基阵区域水动力噪声属于近场噪声,Ashagen[12]在实验中分析了在低航速下某长方形拖体内外的水动力噪声;Beerens等人[13]在海试中测试分析了拖曳阵的水听器接收到的流致噪声,理论上相干分析具有快速优势,但在低频范围存在误差,波数频率谱理论在定性定量上都具有优势,可有效分析流噪声的水平和产生的原因。Henke[14]通过实验的对比,从理论上推广了复杂壳体的流噪声的波谱分析。实验测量的水动力噪声往往是低航速下将水听器置于艇体流线方向或者沿着水深方向布置。因此有必要对高航速下潜艇导流罩基阵区域内的水动力噪声进行有效的计算。
通过仿真计算可以有效的解决场地和航速的限制,并可分析基阵区域的水动力噪声。本文主要研究了高航速下SUBOFF潜艇[15]声呐导流罩内的水动力噪声特性,基于大涡模拟方法计算裸艇体的
水动力信息,分析时域以及频域上的脉动压力规律;采用ACTRAN声学软件对声呐基阵不同区域水动力噪声进行预报,验证了艏部基阵不同区域的水动力噪声差异,为艏部导流罩内声基阵设计和布设提供一定的技术基础支撑。
1 数学模型
计算水动力噪声首先需要获取潜艇在流场中的速度压力信息,在三维粘性湍流流场中准确的获得壁面脉动压力是计算水动力噪声的关键。本文采k-ω模型计算稳态流场,将稳态流场作为初始化结果进行下一步的瞬态流场计算,瞬态流场计算可以获得脉动信息的大涡模拟(Large Eddy Simulation,LES)。LES通过滤波函数将湍流瞬态中的大尺度涡和小尺度涡分离开,大尺度涡作为可解量,不可解量的小尺度涡通过亚格子尺度模型来模拟。LES的控制方程是 N-S(Navier-Stokes),方程在空间进行过滤得到的。N-S方程和过滤方程为

式中,fi为质量力强度,ρ为流体密度,p为压强,μi为各个方向的速度,v表示运动粘性系数,D表示流体区域,G是决定涡旋大小的过滤函数。
过滤不可压缩的N-S方程式(1)就可以得到LES控制方程:

式中,τij为亚网格应力,定义为小涡中各向同性的小尺度变量。对控制方程进行离散化求解就可以得到流场中的速度压力信息。
在声场的求解中由于流声耦合导致不易求解,只能将流场和声场分别计算,并且假设声场不影响流场。在流场有流体的连续性方程:

将式(4)对时间t进行微分,得
然后对式(3)取散度得到

将式(5)与式(6)相减得到

式中,a0为等熵条件下的声速值,ρ与ρ0分别为扰动与未扰动时的密度,Tij称为Lighthill 应力张量。
2 数值模拟
SUBOFF潜艇模型如图1所示。在导流罩内设置 2个虚拟水听器监控罩内声压值,监控点 1位于流线方向上距离艏部导流罩顶点0.2 m处,监控点2位于转捩区位置。当导流罩内部存在声呐基阵时会对内部的声场产生影响,因此后续计算了常见的声基阵对水动力噪声的影响。本文重点研究的是艏部声呐导流罩的流场信息,故去除了相关的附体,导流罩为流线型线体,模型参数如表1所示。
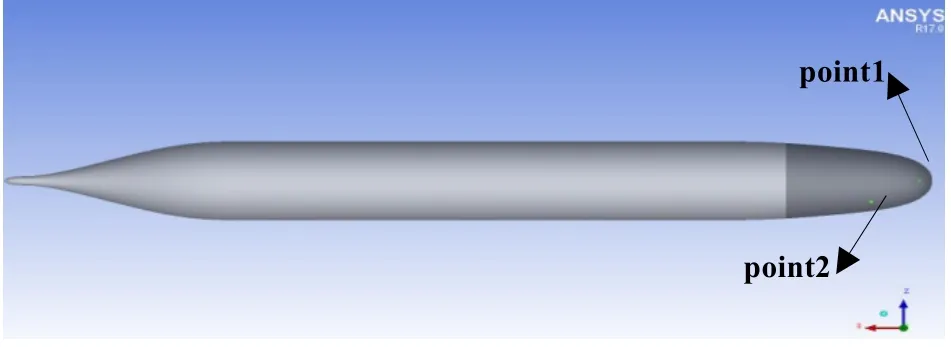
图1 SUBOFF潜艇模型
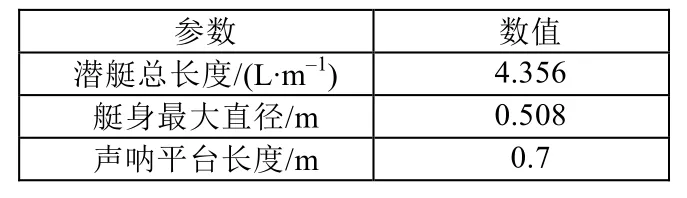
表1 SUBOFF潜艇模型参数
采用前处理软件ICEM划分流场域网格,整个计算域为圆柱体流场(图2),总长度为4倍艇长,入口距离艇艏为1倍艇长,出口距离艇尾为2倍艇长,直径为艇体直径的10倍。在艇体表面生成了10层边界层网格(图3)。
图2 流场计算域

图3 潜艇表面网格
声学网格(图4)只有潜艇表面的声源面网格以及内部噪声传播域的体网格,同样采用ICEM划分声场网格,潜艇的外壁面作为声源域。声学网格由于只需要计算内部的基阵的水动力噪声,故提取声源后只需要划分内部的网格。与流场网格相比,声场网格要求保证在每个波长范围内至少有六个网格节点,以保障计算过程中可充分获得声场信息。
图4 声学表面网格
将艏部入口和尾部出口分别设置为速度入口及压力出口(压力为0 Pa),设置来流速度分别为7.71 m/s(15 kn 航速)和 15.42 m/s(30 kn 航速),四周的圆柱形壁面为对称性壁面,采用SIMPLEC方法进行速度压力耦合迭代,瞬态流场采用大涡模拟方法进行计算,时间步长为0.000 1 s。在导流罩设置的圆柱阵和球阵具有相同的半径,圆柱阵高度为两倍半径,共形阵沿着纵向布置,高度为1.5倍半径,如图5所示,坐标原点位于导流罩最前端,x方向为流向方向,y方向左右舷方向,z方向为为声基阵高度方向。
图5 导流罩内声基阵模型
3 计算结果与分析
本文在流场中模拟15 kn航速(7.71 m/s)和30 kn航速(15.42 m/s)的水动力信息,同时在每个航速工况下分别计算艏部有无声呐基阵的情况,分析艏部声呐基阵和航速对水动力噪声的影响。
3.1 流场计算结果
从图6的流场域的速度云图可以看出,在高航速条件下,潜艇外壁面已基本处于湍流状态,从外壁面的压力云图(图7)可以看出导流罩顶端受到的流体压力最大,在转捩区之前顶端的最大正压力降低到最小压力,转捩为湍流后壁面逐渐形成最大负压力,即在转捩区位置具有最大的压力梯度,这也是产生水动力噪声的主要区域,将大大降低艏部声呐基阵的工作性能;在平行中体的舷侧阵部分流速逐渐增大,压力逐步减小,并且在平行中体区域形成较为稳定的压力区。
图6 15 kn航速下速度分布云图
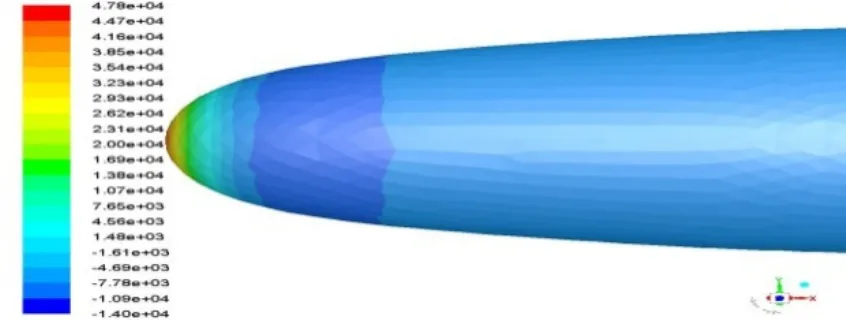
图7 15 kn航速下表面压力云图
3.2 时域和频域脉动压力结果
通过提取壁面的脉动压力作为声源计算基阵区域的水动力噪声,首先需要将时域的脉动压力通过傅立叶变换转化为频域上的脉动压力,以此作为激励源信息。15 kn航速下外壁面上时域的脉动压力如图8所示。外壁面曲率变化较大区域位置会出现较大的压力梯度,这主要是转捩区出现的强烈的脉动压力变化。
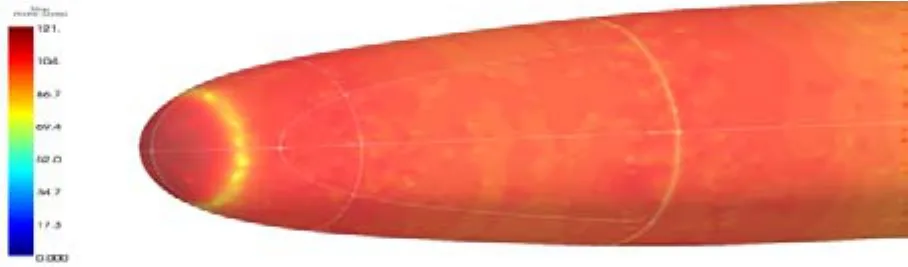
图8 时域上的脉动压力
频域的脉动压力如图 9所示,在低频范围上(20~200 Hz)脉动压力在导流罩上分布较为均匀,到了高频区域主要集中在导流罩顶端。同时从低频到高频在导流罩上的脉动压力最大值逐步降低。声基阵主要的工作频段也是向低频发展,而艏部声呐导流罩区域的脉动压力最大值也主要集中在低频范围。高航速下的导流罩集中分布的脉动压力给艏部声呐的性能带来了较不利的影响。
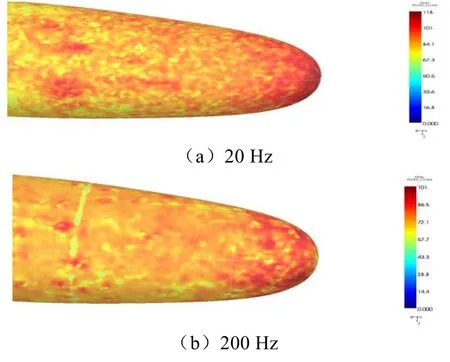

图9 频域脉动压力云图
3.3 水动力噪声特性分析
将频域上的脉动压力作为声场激励源,作用在结构壁面上,使其产生结构振动向基阵区域以及导流罩内辐射噪声,图10给出了30 kn航速下不同频率的水动力噪声声压值分布云图。从图可知在低频上艏部导流罩顶端具有最大的水动力噪声,在高频范围水动力噪声最大值的分布区域位于转捩区附近。从低频到高频范围导流罩上水动力噪声出现了明显的区域划分,即导流罩内声场的反射产生了声场的叠加,存在声压值最小的声场驻点,声场驻点可为声基阵水听器的布设提供一定的参考。
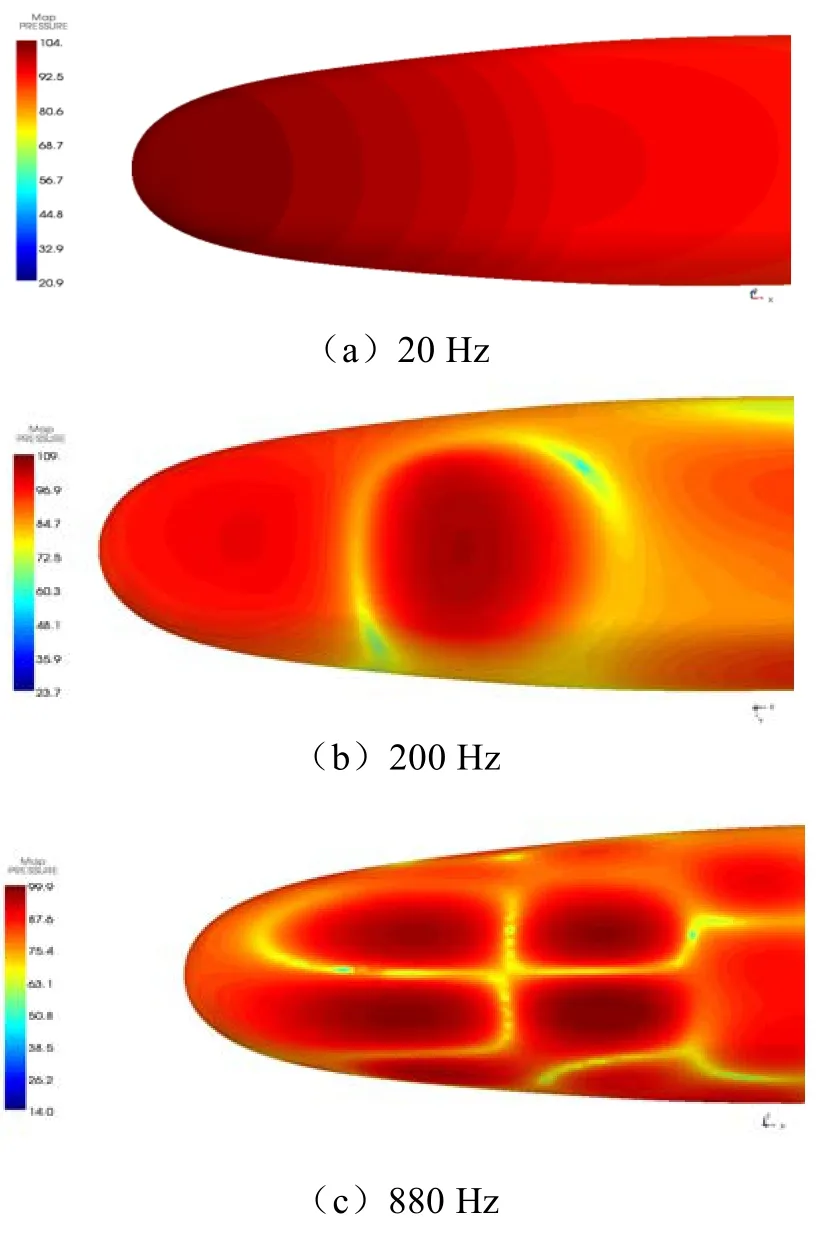
图10 水动力噪声声压云图
图11和图12分别显示了15 kn和30 kn航速下声呐导流罩内无基阵情况下水听器监控点处水动力噪声频域声压值。可以看出,随着航速增加,水动力噪声急剧升高,在整个频域范围内水动力噪声增加了约15~20 dB。两个监控点显示,转捩区位置2的水动力噪声要比位置1的水动力噪声高约4 dB,主要是由于转捩区的速度梯度较大所致。

图11 15 kn航速下声呐导流罩内水动力噪声压值(无基阵)

图12 30 kn航速下声呐导流罩内的水动力噪声压值(无基阵)
布设声基阵后以圆柱阵和球阵中心为圆点设置相同半径周向的监控点,以艏部为 0°方向,左舷为90°方向。从图13可以看出,在15 kn航速下,圆柱阵两侧受到的水动力噪声较大。从图14可以看出,相同航速下,球阵接收到的水动力噪声要小于圆柱阵的水动力噪声,主要源于相同半径下球阵的声反射面小于圆柱阵。
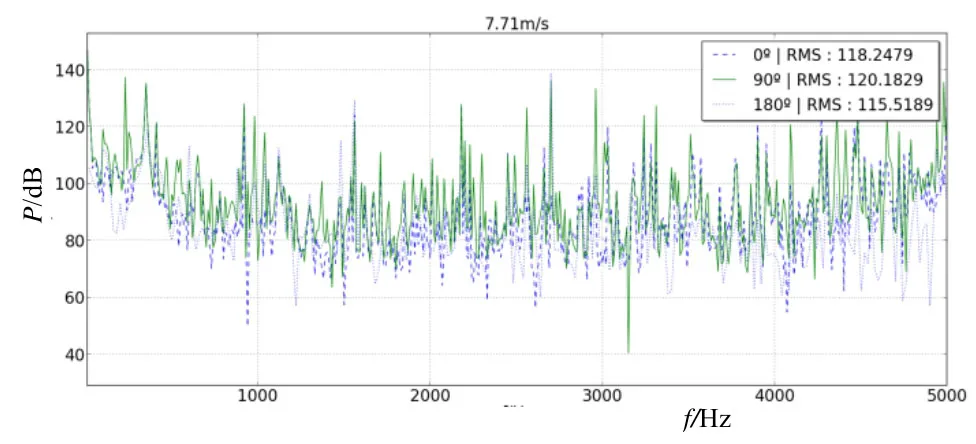
图13 15 kn航速下声呐导流罩内水动力噪声压值(圆柱阵)
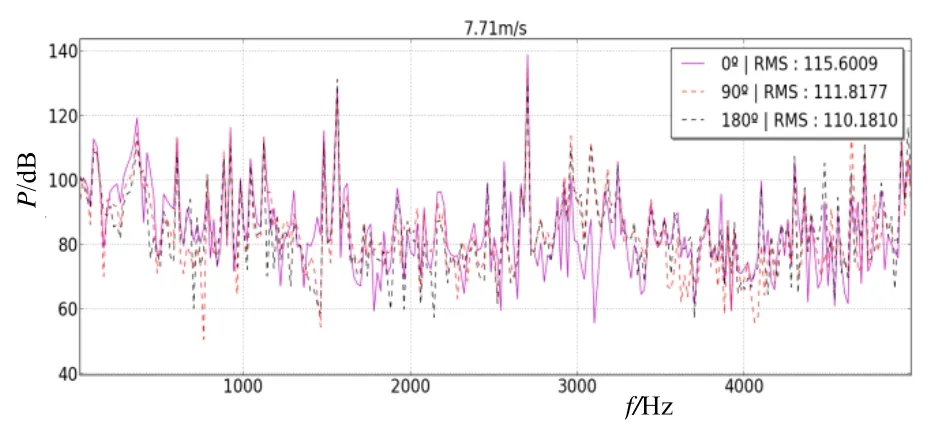
图14 15 kn航速下声呐导流罩内水动力噪声压值(球阵)
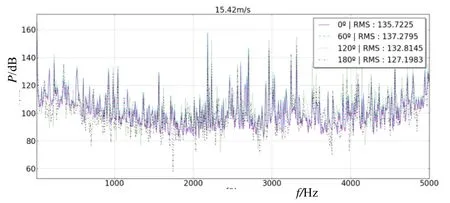
图15 30 kn航速下声呐导流罩内水动力噪声压值(共形阵)
共形阵充分利用了艇体线型沿着导流罩纵向布设,且相比于圆柱阵和球阵其距离导流罩壳体更近。从图15可以看出共形阵接收到的水动力噪声在首尾端出现了起伏,其最大值位置区域位于60°方向,即距离壳体最近位置。
4 结论
本文以 SUBOFF潜艇和艏部不同的声基阵为研究对象,分析了不同航速条件下不同声基阵区域的水动力噪声特性,计算结果表明航行速度增加一倍,水动力噪声增加15~20 dB,在导流罩内声基阵前端的水动力噪声要大于尾部的水动力噪声,水动力噪声具有明显的近场效应,因此对声基阵的设计应考虑保持与壳体合适的距离,以在声场驻点附近为宜。球基阵由于声反射面最小接收到的水动力噪声最低,共形阵具有最大的声学孔径但需要保持合理的壳体距离。
目前,本文只对高航速下艏部导流罩内声呐基阵区域的水动力噪声做了初步的数值计算,声呐基阵区域的自噪声在高航速下还存在螺旋桨空泡噪声的影响,后续将考虑进行高航速下声呐基阵区域螺旋桨噪声的预报,为艏部声呐基阵自噪声治理及为声基阵水听器设计和布阵提供参考。
