植保无人机低空低量施药雾滴沉积飘移分布立体测试方法
2020-04-10王志翀AndreasHerbstJaneBonds曾爱军何雄奎
王志翀,Andreas Herbst,Jane Bonds,曾爱军,赵 铖,何雄奎
·农业航空工程·
植保无人机低空低量施药雾滴沉积飘移分布立体测试方法
王志翀1,Andreas Herbst2,Jane Bonds3,曾爱军1,赵 铖1,何雄奎1※
(1. 中国农业大学理学院,北京 100193;2. Julius-Kühn-Institut, Institute for Application Techniques in Plant Protection,Messeweg 11/12,Braunschweig 38104,Germany;3. Bonds Consulting Group LLC,3900 Wasp Street,Panama City Beach,Florida 32408,USA)
随着植保无人机在中国的广泛使用,植保无人机的沉积分布均匀性与雾滴飘移流失也引起各方面的重视。目前,针对植保无人机施药雾滴沉积飘移的测试方法较少,且着重于从沉积或飘移中某一方面分析植保无人机雾滴沉积飘移规律,未对作业中全方位的雾滴的沉积飘失规律进行系统测试。该文基于国际标准ISO22866和ISO24253建了1套针对低空低量植保无人机的立体测试方法,分别在地面布置沉积和飘移收集器,在空中架设立体沉积和空中飘移收集器,结合航拍影像所获取的植保无人机准确作业参数,对4个型号植保无人机分别搭载德国Lechler公司的IDK120-015和TR80-0067喷头进行了测试,系统分析了无人机周边的总沉积以验证方法准确性,计算了总地面沉降以表征可利用部分和空中耗散以评估环境风险。结果表明,各植保无人机地面沉积率在53.6%~76.6%,地面飘移率最高17.4%,空中飘移率可高达14.7%;该测试系统可收集62.4%~101.7%无人机喷洒出的雾滴。测试的4种植保无人机在搭载IDK喷头后均明显降低了雾滴飘移,但也同时降低地面沉积率;各植保无人机在搭载2种喷头时沉积规律不同,不同植保无人机设计需要选择不同喷头。该测试方法能够有效的收集并分析植保无人机在作业区域的雾滴立体分布状态,可为植保无人机综合评估提供新的参考依据。
农药,无人机,测试方法,立体分布,沉积,飘移
0 引 言
中国是一个农业大国,粮食生产是国家持续发展的基本保障[1]。然而,在当前中国主要粮食作物的生产过程中,植物保护仍以手动半机械化操作为主,投入劳动力多、劳动强度大,人员中毒事件时有发生[2-5]。植保无人机不需要飞行员驾驶、人机分离操作、作风险较小;不需要机场与跑道,转场灵活;机动性强,可以进入水田、丘陵、山地等地面机械难以进入的地块进行作业[6-10]。近年来,中国植保无人机产业发展迅猛,已经在水田、高秆作物间进行植保和授粉作业以及应对爆发性病虫害等方面已经表现出突出的优势[11-12]。据全国农技推广中心统计,2018年植保无人机保有量2.6万多架,比上年增加1.2万多架,作业面积超过1 700万公顷次,比上年增加近1 200万公顷次[13]。
随着无人机在中国的发展,植保无人机的低空低量航空施药技术研究也逐步成为热点[14-16]。张京等[17]在2011研究了WPH642型单旋翼电动无人机喷雾参数在水稻上对雾滴沉积分布的影响。高圆圆等[18]使用单旋翼电动植保无人机防治小麦吸浆虫,防治效果可达81.6%。王昌陵等[19]在2016年提出了植保无人机施药雾滴空间质量平衡测试方法,该方法着重测试了无人机四周的沉积分布状态,探究了不同飞行参数对施药雾滴沉积分布特征的影响。王潇楠等[20]测试了油动单旋翼植保无人机的飘移特性,发现侧风风速与下风向雾滴飘移率成正相关,不同风速下出现14.3%~75.8%的累计飘移率。湖南省于2013年首先制定了《超低空遥控飞行植保机》的地方标准[21],江西省、河南[22-23]等省份相继制定了相应的地方标准,农业部[24]于2018年制定了《植保无人机质量评价技术规范》的行业标准,进一步对植保无人机的生产制造和使用进行了规范,但标准对于喷雾质量的要求较为简单,局限于喷头流量、喷幅、沉积均匀性等基本参数。目前文献和标准中的测试方法均仅着重于单方面分析植保无人机作业的沉积或飘移[25-27],对于一次作业中喷洒药液的去向分布规律并未进行完整的系统测试,作业空间内的总体药液分布规律尚不明确。
因此,本文综合国际标准中关于植保机械地面沉积测试和飘移测试的关键点,提出了一套针对低空低量航空植保无人机的农药雾滴沉积飘移立体测试方法:根据ISO24253[28]沉积分布测试要求建立地面沉积测试带、根据ISO22866[29]和GB/T 24681—2009[30]飘移测试方法要求建立地面飘移测试区、空中飘移测试装置,并创新地建立垂直沉积测试框架。利用精灵4A(大疆创新,DJI)航拍得到的植保无人机的作业状态跟踪影像信息,计算校正飞越测试区域的时间,排除异常样品。对4种植保无人机分别搭载常规喷头TR和防飘喷头IDK进行田间测试,并验证该方法的有效性,为探究植保无人机在作业空间内的雾滴空间立体结构分布提供了方法参考。
1 植保无人机施药雾滴沉积飘移立体测试方法
1.1 测试设备
本方法的试验系统主要由垂直沉积测试框架、地面沉积测试带、空中飘移收集装置、地面飘移收集器、高空航拍机和立体气象站等组成。
为测试植保无人机喷洒雾滴在垂直面内的分布状态,设计了2 m×2 m的垂直沉积测试框架。框架上自距地面0.3 m处起,立柱宽度为6 cm,自地面起每间隔30 cm布置1根长2 m直径2 mm的聚四氟乙烯线,直至框架的1.8 m处,共计6根。聚四氟乙烯线两端用夹子固定至框架上并绷直,如图1a。为收集植保无人机在地面的多航线沉积分布,设计了地面沉积测试带,在2 m的角钢支撑架上间隔0.5 m布置一张5 cm×10 cm的聚氯乙烯(polyvinyl chloride,PVC)卡,PVC卡分布于支撑架两侧以平衡支撑架两侧重量,保证支撑架在无人机下洗气流中的稳定,如图1b。

图1 垂直沉积测试框架和地面沉积测试带
为收集植保无人机在下风向地面飘移雾滴分布特征,将10个直径为15 cm的塑料培养皿,培养皿按3、4、3个分为3组放置于40 cm×60 cm的金属板上,收集地面飘移。为收集植保无人机在下风向空中飘移雾滴分布特征,在距离地面1.5 m,布置等动量雾滴收集器,旋转转速为800 ± 20 r/min,收集装置为2个对称放置的直径3 mm长度70 mm尼龙试管刷。
使用精灵4A航拍机在80 m处航拍全部测试区域,摄像头位置为正下方,分辨率为4 096×2 160像素,帧率50帧/s,ISO和快门为自动,保持静止,并于植保无人机作业开始前就位。
立体气象站使用2个Windmaster三轴超声波风速计(Gill,美国),2个超声波风速计分别安装于距地面2和5 m处,并使用CR6型多通道数据采集器,采集频率为10 Hz,电脑端采集使用Logger Net 4.0对数据抓取并解算,解算后文件保存为csv格式。
1.2 试验方法
测试前,通过在测试现场架设的风筒确定大致风向后,架设立体气象站,并保证气象站在测试区上风向方向,使用电子磁罗盘对气象站北方向(N)进行校准,连续测试30 min风向后,求取风向平均值,在风向方向垂直方向布置标志物,规划飞行航线,航线设置为3航线(去-回-去),在植保无人机喷幅下风向边缘(edge of field,EOF)起,在距EOF 1 m处间隔3 m平行于植保无人机航线方向放置3组垂直沉积测试框架,框架使用地钉固定于土壤中,场地布置图为图2a。在EOF开始向上风向方向间隔0.5 m,布置2条地面沉积测试带,两测试带之间间隔3 m,并垂直于无人机行进方向。在距EOF下风向1、3、5、10、15、20 m处分别布置地面飘移收集装置,金属板布置方向垂直于植保无人机航线方向,10个培养皿处于同一直线上并平行于植保无人机航线方向。在距EOF下风向出10、20 m处分别布置4个等动量雾滴收集器,收集器分为2组各2个置于地面飘移收集器的两侧,收集器之间间距1 m。实际布置效果图如图 2b所示。
测试时,待风速风向到达要求并且稳定后,作起飞前准备,将配置的2 g/L 酸性黄3(brilliant sulfoflavine, BSF)溶液加入药液箱。植保无人机飞行完成并降落后,开启喷洒功能,使用塑料小瓶收集约30 mL喷头喷洒出的液体,并收集所有样品,装入黑色塑料袋中避光保存。
测试后,在培养皿中加入40 mL去离子水,于500 r/min震荡机上震荡洗脱10 min;聚四氟乙烯线加入40 mL去离子水,排出气泡后至于超声波清洗机中超声洗脱5 min;试管刷加入40 mL去离子水,上下摇晃50次洗脱;PVC卡加入160 mL去离子水,于500 r/min震荡机上震荡洗脱5 min。所有样品使用LS-55荧光光谱仪进行测试,氙灯电压为750 V,激发波长为465 nm,接收波长为525 nm,光栅为10 nm。使用纯净水作为空白对照进行测试,测试完成后使用10%乙醇溶液和纯净水先后清洗机器。测得的数据根据国际标准化组织(international standardization organization,ISO)22866和24253标准进行,计算单位面积沉积量或飘移量及沉积率或飘移率公式如下

式中dep为沉积量或飘移量,L/cm2;dep%为沉积率或飘移率,%。smpl为样品荧光值;blk为空白荧光值;spray为喷雾液荧光值;cal为母液稀释倍数;dil为洗脱液体积,mL;col为收集器面积,cm2。V为施药液量,L/hm2。
总沉积率或总飘移率的计算公式如下[24-25]

式中为样品布置长度,m;为在下风向上的距离,m。

图2 测试区场地布置图和航拍效果图
1.3 雾滴沉积飘移立体分布计算方法
综合地面沉积、垂直沉积、地面飘移和空中飘移的数据进行综合分析,构建统一的雾滴立体分布计算方式,如图3所示,其中无人机周边总沉积率为垂直沉积率与地面沉积率之和,认为该部分是在植保无人机附近喷洒出雾滴的主要部分,该部分应接近100%以确定此方法的准确性;总地面沉降率为地面沉积率与地面飘移率之和,认为该部分是在该次作业中能够有效利用的部分;10和20 m处空中飘移是细小农药颗粒随风而动的部分,这些颗粒可能沉降到地面而有效利用,但也可能造成环境风险;空中耗散率为垂直沉积率减去地面飘移率,因为所有下风向飘移均需要通过垂直沉积测试框架,认为该部分是向下风向运动而未沉降到地面的部分,该部分是环境风险最大的部分。

图3 雾滴立体分布计算方法
2 4种植保无人机喷雾雾滴分布立体测试
2.1 试验地点
试验于2018年4月26日—4月28日、5月4日—5月9日在北京市昌平区马池口镇埝头工业园北方天途飞行试验场(116.1757E,40.1928N)多次重复进行。该区域为无作物覆盖地,表面不均匀覆盖2 cm高度以下杂草。
2.2 参与试验的植保无人机
试验用植保无人机有4种,其主要技术参数如表1所示,旋翼具体参数测量方法如图4。4种无人机分别使用IDK120-015(Lechler GmbH,德国)喷头和TR80-0067(Lechler GmbH,德国)喷头进行飞行作业测试。在起飞前测试各无人机在使用不同喷头时的流量,使用质量法测试在1 min种各喷头流出的液体质量后取平均值,结果见表1。4种无人机中3W-TTA6和3W-TTA8为人工标记航线后自动飞行(AB点模式),其余2种为手动飞行。
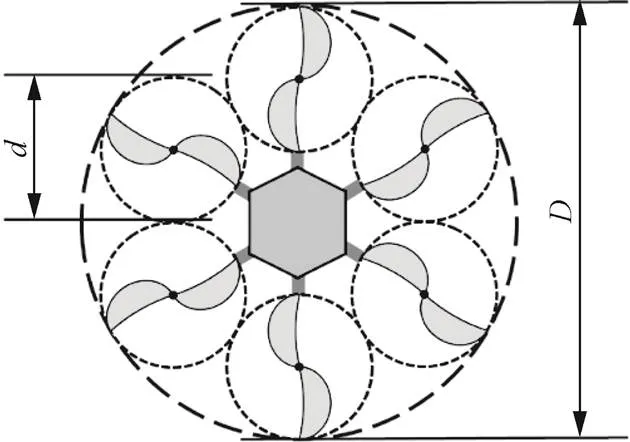
注:d为旋翼直径,cm;D为旋翼覆盖范围直径, cm。
2.3 田间试验
按照上述植保无人机雾滴沉积与飘移分布立体测试方法展开试验,样品所有编号均从上风向方向开始,平行样品编号从飞机前进方向开始。飞行速度设置为2 m/s,飞行高度为1.5 m。测试的具体参数及测试时气象条件如表2所示,每个测试组至少重复3次。

表1 测试植保无人机参数
注:IDK120-015和TR80-0067为2种不同类型喷头。
Note1: IDK120-015 and TR80-0067 are 2 different types of nozzles.
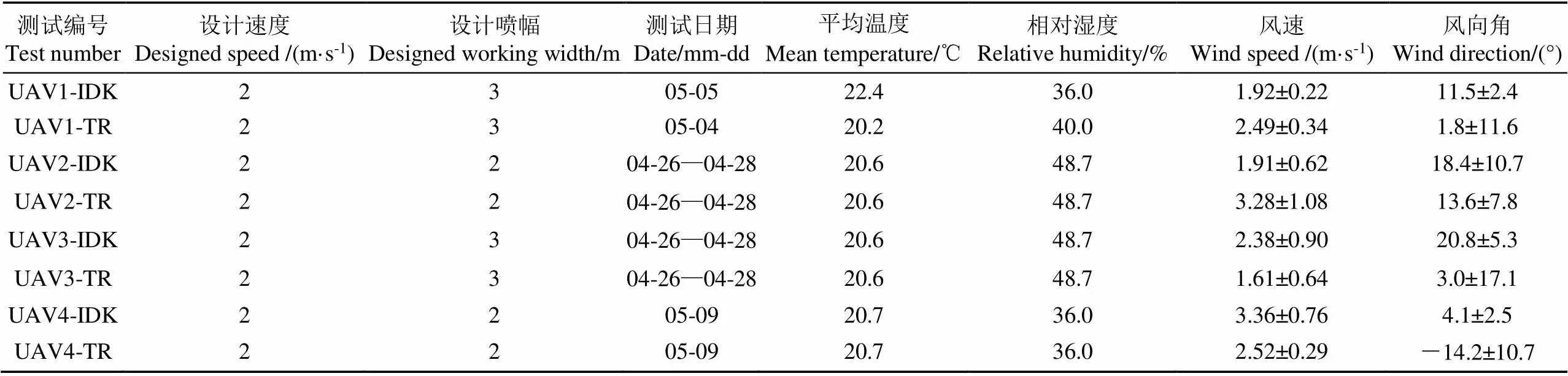
表2 植保无人机测试参数设计及气象环境条件
注:风向以北方向为0°,南方向为180°,范围(-179.9°~180°)。
Note: 0° of wind direction is North. South is 180°. Range of wind direction is-179.9° to 180°.
3 测试结果与分析
3.1 航拍影像
通过精灵4A分析航拍影像获取植保无人机在测试过程中的运动状态及飞行轨迹,准确计算出植保无人机在飞越测试区域时的准确飞行时长、速度、作业幅宽,如表3。并基于飞行时长信息结合喷头流量准确地计算出在测试区域内喷洒出的液体量,为计算沉积率、飘移率等评估指标提供了更加准确的数据支持。其中MG-1s(UAV4)自带雷达避障功能,飞行时会自动躲避雾滴立体测试框架,故使用手动飞行模式以关闭避障雷达,并因此导致飞行速度和工作幅宽大幅偏离设计值,速度误差最大为166.4%,工作幅宽误差最大为100%。

表3 植保无人机实际作业参数与设计作业参数
本文采用的轨迹是基于航拍影像对植保无人机的飞行状态分析得到的,相比于传统的在飞机上安装卫星定位系统,操作更为简便,无需安装其他设备。传统的定位系统需要在无人机上安装移动端,在地面设立基准站,系统庞大且复杂;同时移动端与基准站及电脑端通信多采用433 MHz[27]或2.4 GHz[31-33]通信,而这2个频段也是无人机遥控器常采用的频段,因此存在信号干扰、操作失效、坠机等风险。而航拍机的影像记录直接储存于存储卡中,无需传输;同时影像可以以4 096×2 160像素的分辨率进行拍摄,测试中场地长度50 m,可计算得出空间分辨率为1.2 cm,即动态定位误差为1.2 cm,高于机载RTK定位系统动态定位准确度[34-35];且影像是以50帧/s的速度进行采集的,即定位间隔是0.02 s,这也高于传统卫星定位系统的0.05 s[36-37]。
3.2 雾滴沉积、飘移立体分布
3.2.1 雾滴地面沉积分布
图5a为4种植保无人机搭载不同喷头的地面沉积分布结果,横坐标为距离下风向测试区边沿距离位置,可以看到4种无人机在下风向侧的沉积多于上风向侧,均有不同程度的沉积偏移,造成部分测试在下风向部分(0~8 m)沉积率高于100%。将各测试作业范围内的沉积率进行平均,可得到总沉积率,如图5b,在作业区域范围内MG-1s使用IDK喷头(UAV4-IDK)沉积率比使用TR喷头(UAV4-TR)高;3W-TTA8-20则相反,使用TR喷头(UAV3-TR)沉积率高于使用IDK喷头(UAV3-IDK);3WQF120-12(UAV1)和3W-TTA6-10(UAV2)则无明显差异。对于沉积变异系数(coefficient of variation,CV),3WQF120-12(UAV1)和3W-TTA6-10 (UAV2)使用IDK喷头的变异系数高于使用TR喷头;3W-TTA8-20(UAV3)和MG-1s(UAV4)使用TR喷头变异系数高于使用IDK喷头。沉积变异系数与沉积率规律相似,但在此次测试中的所有植保无人机的沉积变异系数均较高,远高于传统的喷杆式喷雾机[38-39]。

图5 各测试的地面的沉积分布、总沉积率和变异系数
Fig.5 Ground deposition distribution, rate and coefficient of variation of each test
3.2.2 雾滴垂直沉积分布
图6a为雾滴立体测试框架上收集到的沉积分布状态,呈现沉积率随着高度的上升逐渐减小的规律,在接近地面处沉积率最大;4种植保无人机在使用IDK喷头后均降低了下风向垂直沉积,这主要是由于IDK的雾滴粒径大于TR喷头,具有一定防飘移能力[40-41],降低了雾滴向下风向运动的趋势。从图6b可以看出,3WQF120-12(UAV1)、3W-TTA6-10(UAV2)和3W-TTA8-20(UAV3)在分别使用IDK喷头时,总沉积率接近,变化规律接近,但对于MG-1s(UAV4)而言,下风向垂直沉积明显高于其余3种飞机,说明该飞机喷雾向下风向移动明显,有较高飘移风险。

图6植保无人机在立体测试框架上的沉积分布
3.2.3 地面雾滴飘移分布
图7a是到EOF不同距离上的地面飘移率,各植保无人机的飘移率均随距离的增加而减少,其中MG-1s(UAV4)的飘移在各个距离均明显高于其他植保无人机,这与垂直沉积结果呈现的沉积向下风向移动吻合。图7b是各植保无人机的地面总飘移率,MG-1s(UAV4)在使用2种喷头时总飘移率均高于其他3种无人机,在使用TR喷头时高达41%的总飘移率,有非常高的飘移风险。
3.2.4 空中雾滴飘移分布
图8是各植保无人机在10和20 m处的空中飘移。能够明显的看出几乎没有检测到3W-TTA6-10(UAV2)和3W-TTA8-20(UAV3)的空中飘移,而3WQF120-12(UAV1)和MG-1s(UAV4)收集在10和20 m处均收集到一定量的飘移,其中MG-1s(UAV4)飘移率在接近3WQF120-12(UAV1)空中飘移率的两倍,有极高的飘移风险,在20 m处最多能收集到6.18%的飘移雾滴。

3.3 喷雾雾滴立体分布分析
对于测试的4种植保无人机,在无人机周边均收集到了62.4%~101.7%的喷洒雾滴,由于测试误差的原因,部分测试中出现超过100%的情况。部分无人机收集率在100%左右,收集率低于100%的原因可能是雾滴由于卷扬作用附着于植保无人机的机身上,也可能是由于地效向上风向移动。对于地面总沉降率,4种植保无人机搭载2种喷头规律不一致,其中3WQF120-12(UAV1)、3W-TTA6-10(UAV2)、3W-TTA8-20(UAV3)使用TR喷头总沉降率更高,但MG-1s(UAV4)使用IDK喷头总沉降率更高,如表4。4种植保无人机在使用IDK喷头后空中飘移、地面飘移、空中耗散均大幅减少,3WQF120-12(UAV1)、3W-TTA6-10(UAV2)、3W-TTA8-20(UAV3)产生总飘移均小于5%,这大幅降低了环境风险。MG-1s(UAV4)植保无人机在使用IDK喷头后喷幅内地面沉积由53.6%提高至76.6%,10 m处空中飘移由14.7%降低至2.6%,空中耗散部分由34.4%降低至2.7%,说明该飞机较适合使用IDK喷头,但其余3种飞机在使用IDK喷头时虽然降低了飘移部分,但也同时降低了地面沉积部分,其他雾滴可能由于地效作用在上风向方向有一定移动,超出了测试区域。

图8 下风向10和20m处的空中飘移率

表4 雾滴沉积飘移立体分布结果
4 结 论
本文提出了一种全方位立体测试植保无人机雾滴沉积飘移的方法,将高空航拍技术应用到测试中,准确获取了飞行速度、飞行轨迹等重要参数,实现了试验过程的全程记录及可溯,提供了更加科学准确的植保无人机作业状态与技术参数特征。该方法综合了地面沉积、垂直沉积、地面飘移、空中飘移4方面进行综合分析,得到了植保无人机喷洒雾滴立体分布。使用该方法对4种植保无人机搭载2种喷头进行了田间测试,对试验结果的分析得到以下结论:
1)研究的植保无人机施药全方位立体沉积飘移测试方法及其系统可用、准确且可靠,可收集植保无人机喷洒出的62.4%~101.7%雾滴,为植保无人机雾滴立体分布分析评估方法给予了一定的参考。
2)通过综合地面沉积、垂直沉积、地面飘移、空中飘移等4部分,确定了植保无人机在作业过程中的雾滴立体分布,各植保无人机地面沉积率在53.6%~76.6%,地面飘移率最高为17.4%,空中飘移率可高达14.7%。植保无人机虽作业过程中大部分雾滴可沉积到地面上,但仍有一定量的雾滴飘移出喷洒区,这可能造成严重的环境影响。
3)测试的4种植保无人机在搭载IDK喷头后均明显降低了雾滴飘移,但也降低地面沉积率。因此,IDK喷头在植保无人机的适用性仍需进一步研究,但仍应在环境风速较大的情况下使用防飘喷头,以降低飘移。
4)测试的4种植保无人机在搭载TR和IDK喷头时,沉积飘移分布规律不一致,说明不同的植保无人机的设计会对喷头的选择造成影响,各植保无人机应该根据自身测试结果选择合适的喷头。
[1]何雄奎. 改变我国植保机械和施药技术严重落后的现状[J]. 农业工程学报,2004,20(1):13-15. He Xiongkui. Improving severe draggling actuality of plant protection machinery and its application techniques[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(1): 13-15. (in Chinese with English abstract)
[2]周志艳,臧英,罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报,2013,29(24):1-10. Zhou Zhiyan, Zang Ying, Luo Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 1-10. (in Chinese with English abstract)
[3]薛新宇,梁建,傅锡敏. 我国航空植保技术的发展前景[J]. 中国农机化,2008(5):72-74.
[4]周海燕,杨炳南,严荷荣,等. 我国高效植保机械应用现状及发展展望[J]. 农业工程,2014(6):4-6.
[5]Otto S, Loddo D, Baldoin C, et al. Spray drift reduction techniques for vineyards in fragmented landscapes[J]. Journal of Environmental Management, 2015, 162(2): 290-298.
[6]Huang Y, Hoffmann W C, Lan Y, et al. Development of a spray system for an unmanned aerial vehicle platform[J]. Applied Engineering in Agriculture, 2009, 25(6): 803-809.
[7]何雄奎. 药械与施药技术[M]. 北京:中国农业大学出版社,2012.
[8]张东彦,兰玉彬,陈立平,等. 中国航空施药技术研究进展与展望[J]. 农业机械学报,2014,45(10):53-59. Zhang Dongyan, Lan Yubin, Chen Liping, et al. Current status and future trends of agricultural aerial spraying technology in China[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 53-59. (in Chinese with English abstract)
[9]吕宏靖,李哲,于丽杰. 无人旋翼植保机的应用研究[J]. 农业科技与装备,2015(5):68-69. Lü Hongjing, Li Zhe, Yu Lijie, Liaoning. Analysis of the application of rotor drone for plant care[J]. Agricultural Science & Technology and Equipment, 2015(5): 68-69. (in Chinese with English abstract)
[10]罗锡文. 对加快发展我国农业航空技术的思考[J]. 农业技术与装备,2014(5):7-15.
[11]李继宇,兰玉彬,施叶茵. 旋翼无人机气流特征及大田施药作业研究进展[J]. 农业工程学报,2018,34(12):104-118 Li Jiyu, Lan Yubin, Shi Yeyin. Research progress on airflow characteristics and field pesticide application system of rotary-wing UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 104-118. (in Chinese with English abstract)
[12]何勇,肖舒裴,方慧,等. 植保无人机施药喷嘴的发展现状及其施药决策[J]. 农业工程学报,2018,34(13):113-124. He Yong, Xiao Shupei, Fang Hui, et al. Development situation and spraying decision of spray nozzle for plant protection UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 113-124(in Chinese with English abstract)
[13]中华人民共和国农业农村部网站[EB/OL]. (2019-05-05) [2019-8-30]. http: //www. njhs. moa. gov. cn/nyjxhqk/ 201905/t20190531_6315977. htm.
[14]Fritz B K, Hoffmann W C, Bagley W E. Effects of spray mixtures on droplet size under aerial application conditions and implications on drift[J]. Applied Engineering in Agriculture, 2009, 26(1): 21-29.
[15]Huang Y, Thomson S J. Characterization of spray deposition and drift from a low drift nozzle for aerial application at different application altitudes[J]. International Journal of Agricultural and Biological Engineering, 2011, 4(4): 28-33.
[16]Lan Y, Thomson S J, Huang Y, et al. Current status and future directions of precision aerial application for site-specific crop management in the USA[J]. Computers and Electronics in Agriculture, 2010, 74(1): 34-38.
[17]张京,何雄奎,宋坚利,等. 无人驾驶直升机航空喷雾参数对雾滴沉积的影响[J]. 农业机械学报,2012,43(12):94-96. Zhang Jing, He Xiongkui, Song Jianli, et al. Influence of spraying parameters of unmanned aircraft on droplets deposition[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(12): 94-96. (in Chinese with English abstract)
[18]高圆圆,张玉涛,张宁,等. 小型无人机低空喷洒在小麦田的雾滴沉积分布及对小麦吸浆虫的防治效果初探[J]. 作物杂志,2013(2):139-142. Gao Yuanyuan, Zhang Yutao, Zhang Ning, et al, Primary studies on spray droplet distribution and control effects of aerial spraying using unmanned aerial vehicle (UAV) against the corn borer[J]. Crops, 2013(2): 139-142. (in Chinese with English abstract)
[19]王昌陵,何雄奎,王潇楠,等. 无人植保机施药雾滴空间质量平衡测试方法[J]. 农业工程学报,2016,32(11):54-61. Wang Changling, He Xiongkui, Wang Xiaonan, et al. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(11): 54-61. (in Chinese with English abstract)
[20]王潇楠,何雄奎,王昌陵,等. 油动单旋翼植保无人机雾滴飘移分布特性[J]. 农业工程学报,2017,33(1):117-123. Wang Xiaonan, He Xiongkui, Wang Changling, et al. Spray drift characteristics of fuel powered single-rotor UAV for plant protection[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 117-123. (in Chinese with English abstract)
[21]湖南省质量技术监督局:DB43/T 849—2013超低空遥控飞行植保机[S]. 长沙:湖南省质量和标准化研究院. 2013
[22]江西省质量技术监督局. DB36/T 930—2016 农用植保无人机[S]. 南昌:江西省标准化研究院. 2016
[23]河南省地方标准:DB41/T 1521—2018农用旋翼植保无人机技术条件[S]. 郑州:河南省市场监督管理局标准化处. 2018
[24]中华人民共和国农业部. NY/T 3213—2018 植保无人机质量评价技术规范[S]. 北京:中国农业出版社. 2018
[25]邱白晶,王立伟,蔡东林,等. 无人直升机飞行高度与速度对喷雾沉积分布的影响[J]. 农业工程学报,2013,29(24):25-32. Qiu Baijing, Wang Liwei, Cai Donglin, et al. Effect of flight altitude and speed of unmanned helicopter on spray deposition uniform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 25-32. (in Chinese with English abstract)
[26]秦维彩,薛新宇,周立新,等. 无人直升机喷雾参数对玉米冠层雾滴沉积分布的影响[J]. 农业工程学报,2014,30(5):50-56. Qin Weicai, Xue Xinyu, Zhou Lixin, et al. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(5): 50-56. (in Chinese with English abstract)
[27]王昌陵,宋坚利,何雄奎,等. 植保无人机飞行参数对施药雾滴沉积分布特性的影响[J]. 农业工程学报,2017,33(23):109-116. Wang Changling, Song Jianli, He Xiongkui, et al. Effect of flight parameters on distribution characteristics of pesticide spraying droplets deposition of plant-protection unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 109-116. (in Chinese with English abstract)
[28]ISO/TC 23/SC 6. Crop protection equipment-spray deposition test for field crop: ISO 24253—1[S]. Paris: ISO Copyright Office, 2015.
[29]ISO/TC 23/SC 6. Equipment for crop protection-methods for the field measurement of spray drift: ISO 22866[S]. Paris: ISO Copyright Office, 2005.
[30]中华人民共和国国家质量监督检验检疫总局. 植物保护机械喷雾飘移的田间测量方法:GB/T 24681—2009[S]. 北京:中国标准出版社,2010.
[31]Fritz B K. Meteorological effects on deposition and drift of aerially applied sprays[J]. Transactions of the Asabe, 2006, 49(5): 1295-1301.
[32]Grasmeyer J M, Keennon M T. Development of the blackwidow micro air vehicle[J]. Progress in Astronautics and Aeronautics, 2001, 195: 519-535.
[33]汪沛,罗锡文,周志艳,等. 基于微小型无人机的遥感信息获取关键技术综述[J]. 农业工程学报,2014,30(18):1-12. Wang Pei, Luo Xiwen, Zhou Zhiyan, et al. Key technology for remote sensing information acquisition based on micro UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(18): 1-12. (in Chinese with English abstract)
[34]潘冉冉,蒋浩,张洪,等. 低成本实时动态载波相位差分 GPS 的定位精度研究[J]. 浙江大学学报 (农业与生命科学版),2018,44(4):414-422. Pan Ranran, Jiang Hao, Zhang Hong, et al. Research on positioning accuracy of low cost real time kinematic-global positioning system (RTK-GPS)[J]. Journal of Zhejiang University: Agriculture and Life Sciences, 2018, 44(4): 414-422. (in Chinese with English abstract)
[35]杨元喜,李金龙,王爱兵,等. 北斗区域卫星导航系统基本导航定位性能初步评估[J]. 中国科学:地球科学,2014,44(1):72-81 Yang Yuanxi, Li Jinlong, Wang Aibing, et al. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system[J]. Scientia Sinica: Terrae, 2014, 44(1):72-81. (in Chinese with English abstract)
[36]刘卉,孟志军,付卫强. 基于GPS轨迹的农机垄间作业重叠与遗漏评价[J]. 农业工程学报,2012,28(18):149-154. Liu Hui, Meng Zhijun, Fu Weiqiang. Overlap and skip evaluation for agricultural machinery operation based on GPS track logs[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(18): 149-1 54. (in Chinese with English abstract)
[37]张慧春,郑加强,周宏平. 精确林业GPS信标差分定位精度分析[J]. 农业工程学报,2011,27(7):210-214. Zhang Huichun, Zheng Jiaqiang, Zhou Hongping. Positioning accuracy analysis of RBN DGPS applied in precision forestry[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 210-214. (in Chinese with English abstract)
[38]何雄奎,曾爱军,刘亚佳,等. 水田风送低量喷杆喷雾机设计及其参数研究[J]. 农业工程学报,2005,21(9):76-79. He Xiongkui, Zeng Aijun, Liu Yajia, et al. Design and parameter test of the low volume air assistant rice boom sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(9): 76-79. (in Chinese with English abstract)
[39]齐鹏. 水田自走式变量喷杆喷雾机设计与试验研究[D]. 北京:中国农业大学,2017. Qi Peng. Study on Spray Drift and Anti-drift Method[D]. Beijing: China Agricultural University, 2017. (in Chinese with English abstract)
[40]Garcerá C, Moltó E, Chueca P. Spray pesticide applications in Mediterranean citrus orchards: Canopy deposition and off-target losses[J]. Science of the Total Environment, 2017, 599: 1344-1362.
[41]Nonnenmacher S, Piesche M. Design of hollow cone pressure swirl nozzles to atomize Newtonian fluids[J]. Chemical Engineering Science, 2000, 55(19): 4339-4348.
Stereoscopic test method for low-altitude and low-volume spraying deposition and drift distribution of plant protection UAV
Wang Zhichong1, Andreas Herbst2, Jane Bonds3, Zeng Aijun1, Zhao Cheng1, He Xiongkui1※
(1.,,100193,; 2.,,11/12,38104,; 3.,3900,,32408,)
With the widespread application of plant protection unmanned aircraft vehicle (UAV) in China, the application technology of plant protection UAV has attracted attention, and the environmental risk from the uniformity of deposition distribution and droplet drift loss is also an important question. At present, there are few test methods focusing on the droplet distribution in the environment of plant protection UAV. In this paper, a set of stereoscopic test methods for low-altitude low-volume plant protection UAV was designed mainly based on the international standards ISO 22866 and ISO 24253. The methods concluded two parts of the ground distribution and airborne distribution. The ground distribution was collected by the standard collectors (Petri dishes and Polyvinyl Chloride card) arranged on the ground according to the ISO standard. The airborne distribution mainly used a vertical sedimentation testing framework. The droplets of aerial drift were collected by Polytetrafluoroethylene lines and rotary tube brushes. The accurate flight parameters (fight speed and working width) of each test were captured by a camera UAV (Phantom 4A, produced by DJI) above the ground 80 m. Two three-axis ultrasonic anemometers (Gill, USA) were installed above ground 2 and 5 m respectively, which could obtain real-time meteorological data including the wind speed, wind direction and temperature. There were four types plant protection UAVs for testing, the MG-1s (DJI, 8 rotors), 3WQF-120-12 (Anyang Quanfeng, 1 rotor), 3W-TTA6-10 (Beifang Tiantu, 6 rotors) and 3W-TTA8-20 (Beifang Tiantu, 8 rotors), they were tested respectively with the nozzles of IDK 120-015 and TR 80-0067 produced by Lechler (Germany). A new calculation method was proposed, and total deposition around UAV was calculated for verifing the accuracy of method. Total ground sedimentation and aerial disappearance were calculated to represent all available pesticide, and evaluate the environmental risk respectively. The results showed that the ground deposition rate of all tests was between 53.6% to 76.6%, the highest ground drift rate was rich to 17.4%, and the airborne drift rate could be as high as 14.7%. This test system could collect 62.4%-101.7% droplets around the UAV sprayed by plant protection UAV. The drifts of 4 tested plant protection UAV installed IDK nozzles were obviously less than that with TR nozzles, meanwhile, the nozzle changing also reduced the ground deposition in some tests. Different plant protection UAVs had different distribution regular patterns of deposition when they installed TR or IDK nozzles. It meant the designs of different plant protection UAVs needed to select the right nozzles after finishing the distribution test for different types of nozzles. Thus, the most suitable nozzle type of each UAV should be tested and selected before the UAV working. This test method can effectively and systematically collect and analyze the droplets distribution of plant protection UAV and the drift regularity in the work area, which can provide a new reference for the comprehensive evaluation of the plant protection UAV.
pesticide; UAV; test method; stereoscopic distribution; deposition; drift
王志翀,Andreas Herbst,Jane Bonds,曾爱军,赵 铖,何雄奎. 植保无人机低空低量施药雾滴沉积飘移分布立体测试方法[J]. 农业工程学报,2020,36(4):54-62.doi:10.11975/j.issn.1002-6819.2020.04.007 http://www.tcsae.org
Wang Zhichong, Andreas Herbst, Jane Bonds, Zeng Aijun, Zhao Cheng, He Xiongkui. Stereoscopic test method for low-altitude and low-volume spraying deposition and drift distribution of plant protection UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(4): 54-62. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.04.007 http://www.tcsae.org
2019-09-11
2020-01-20
国家自然科学基金(31761133019);国家重点研发计划(2017YFD0700903,2017YFD 0200300);国家现代农业产业技术体系(CARS-28-20);公益性行业科研专项(201503130)联合资助。
王志翀,博士生,主要从事植保机械与施药技术研究。Email:549422839@qq.com
何雄奎,教授,博士生导师,主要从事植保机械与施药技术研究。Email:xiongkui@cau.edu.cn
10.11975/j.issn.1002-6819.2020.04.007
S252.3;S435
A
1002-6819(2020)-04-0054-09