载人地月混合轨道一次脉冲应急返回轨道分析
2020-04-10吕鹏伟尚志2王平
吕鹏伟,尚志2,*,王平
1. 中国空间技术研究院 载人航天总体部,北京 100094 2. 中国航天科技集团有限公司,北京 100048
近期,随着美国重返月球“阿尔忒弥斯”计划,全球范围内掀起了载人月球探测的热潮。载人地月转移轨道目前主要包括两类:自由返回轨道(free return trajectory)和混合轨道(hybrid trajectory)[1]。自由返回轨道安全性较高,但能达到的环月轨道倾角受限于月球白道面附近;混合轨道前半段为自由返回阶段,后半段为非自由返回阶段,可以增强设计的灵活性。若要到达月球高纬度地区甚至极轨,则要采用混合轨道[2]。混合轨道的缺点是不能保证转移后半程的安全性。因此,对于载人月球探测任务,混合轨道的应急轨道研究十分重要。
对于载人地月转移轨道,中外学者进行了大量研究。基于双二体模型,Dallas[3]设计了不同类型的自由返回轨道,并对比了各类型在速度增量等方面的优劣;李京阳[4]设计了地月转移多段自由返回轨道,同时对转移的速度增量进行了分析,但地月转移时间较长;黄文德等[5]对自由返回轨道及混合轨道进行了设计,并给出了混合轨道在能量消耗和飞行时间等方面的特性,但在特性分析方面缺少对混合轨道升交点特性的研究;黄文德等[6]对载人月球转移直接中止及借助自由返回轨道中止返回两种方式的速度增量与转移时间等特性进行了分析,但并未研究绕月后应急机动的可能;彭坤[7]利用人工免疫算法,对载人登月任务地月转移双脉冲的中止策略进行了研究。基于三体模型,Mark等[8]设计了自由返回轨道的快速算法,但局限于对称自由返回轨道;张科等[9]利用圆型限制性三体模型求解了双脉冲地月转移轨道,但其求得的地月转移轨道转移时间较长,不适合载人月球探测工程的应用;侯锡云等[10]研究了对称与非对称的自由返回轨道,分析了不同轨道高度自由返回轨道倾角的限制范围。郗晓宁等[11]对载人登月任务中止轨道问题进行了综述。
本文采用圆型限制性三体动力学模型,研究了混合轨道的三种一次脉冲返回地球的应急轨道,对其速度增量和转移时间等特性进行了分析,并从势能角度解释速度增量变化的趋势。
1 混合轨道的应急返回轨道
混合轨道由自由返回阶段与非自由返回阶段两部分组成[5],如图1所示。航天器在混合轨道中,首先进入自由返回阶段,选择合适的时机实施一次混合机动,航天器将进入非自由返回阶段。对于混合轨道的应急轨道,若载人飞船在自由返回阶段出现故障,则可以沿自由返回轨道返回地球,实现再入。本文基于圆型限制性三体动力学模型,利用微分修正算法,主要研究非自由返回阶段的应急轨道。
若载人飞船进入非自由返回阶段后发生故障,主要考虑三类应急返回方式。方式一,直接返回,即在故障发生后实施一次轨道机动;方式二,故障发生后即刻机动,利用月球引力绕月后返回;方式三,在飞行器绕月后再实施机动返回的方式。本文同时分析三类应急返回方式需要的速度增量与转移时间等特性。
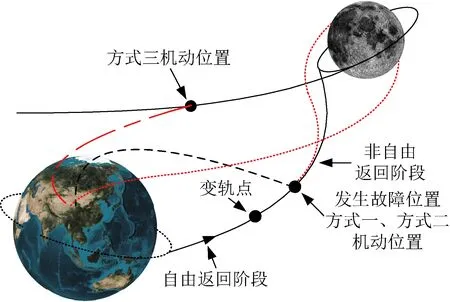
图1 混合轨道的组成Fig.1 Composition of hybrid trajectory
1.1 方式一:直接返回
直接返回应急方式的轨道机动关系如图2所示。当航天器进入混合轨道的非自由转移阶段后,若发生故障,进行一次脉冲返回地球。
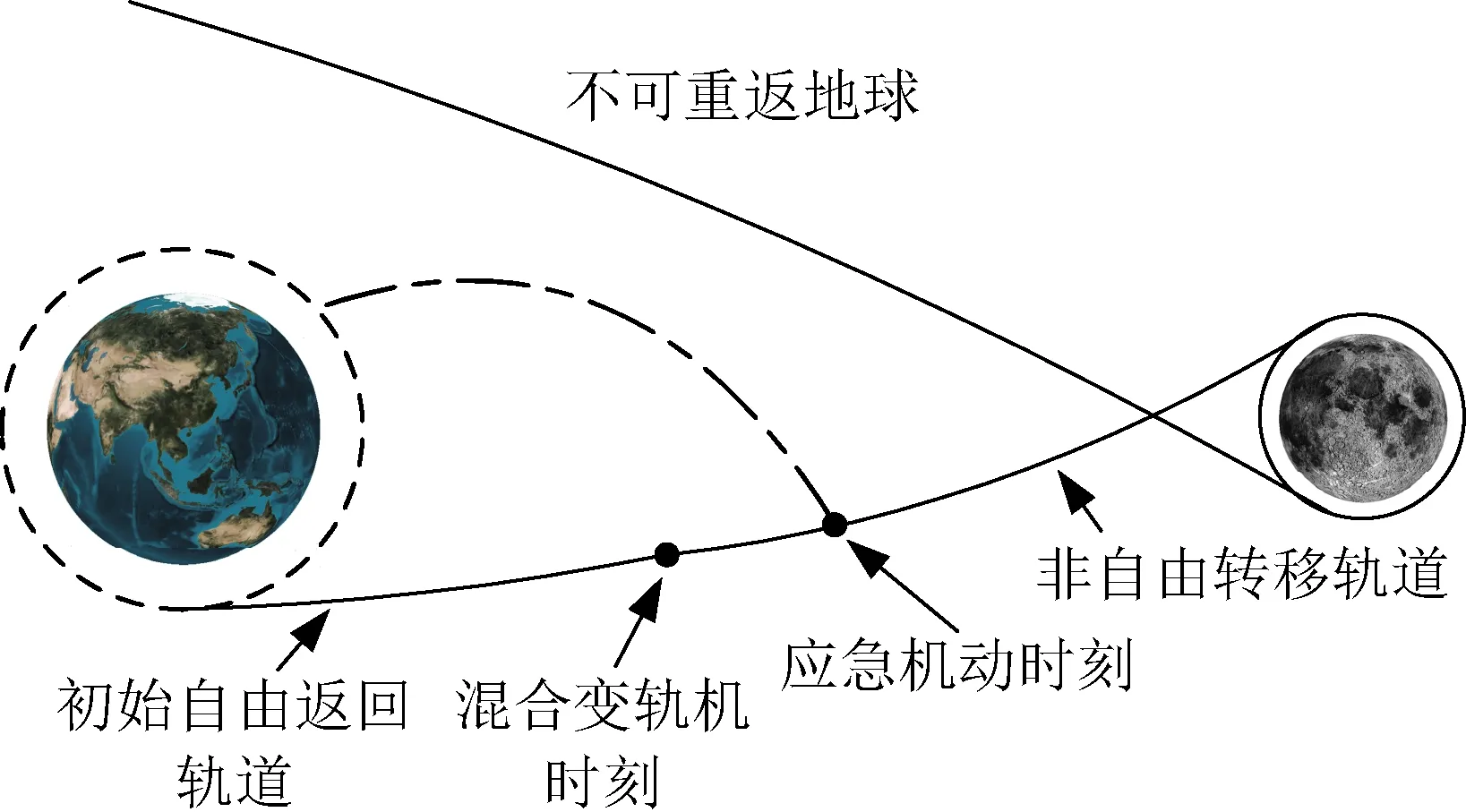
图2 直接返回示意Fig.2 Sketch of direct return
在圆型限制性三体模型[13]中,状态转移矩阵刻画了初始状态改变量对终端状态改变量的影响,记为Φ(t0,t)。状态转移矩阵[14]满足以下方程:
(1)
式中:f(x)为圆形限制性三体问题的动力学方程;A(t)为f(x)的雅克比矩阵。

约束变量F(Xrf)与再入时的状态变量Xrf存在以下关系:
δF(Xrf)=BδXrf
(2)
(3)
因此,约束变量F(Xrf)与机动后的初始状态变量满足以下关系:
δF(Xrf)=BδXrf=BA1δX0
(4)
其中:A1为Xrf的雅克比矩阵。
至此,对于给定的再入高度、再入角与应急返回转移时间,就可以通过微分修正不断迭代,确定直接返回转移所需要的速度增量。
1.2 方式二:即刻机动绕月返回
故障发生后即刻机动,绕月返回的应急方式通过借助月球的引力改变航天器的运动方向,从而实现节省速度增量,其机动关系如图3所示。
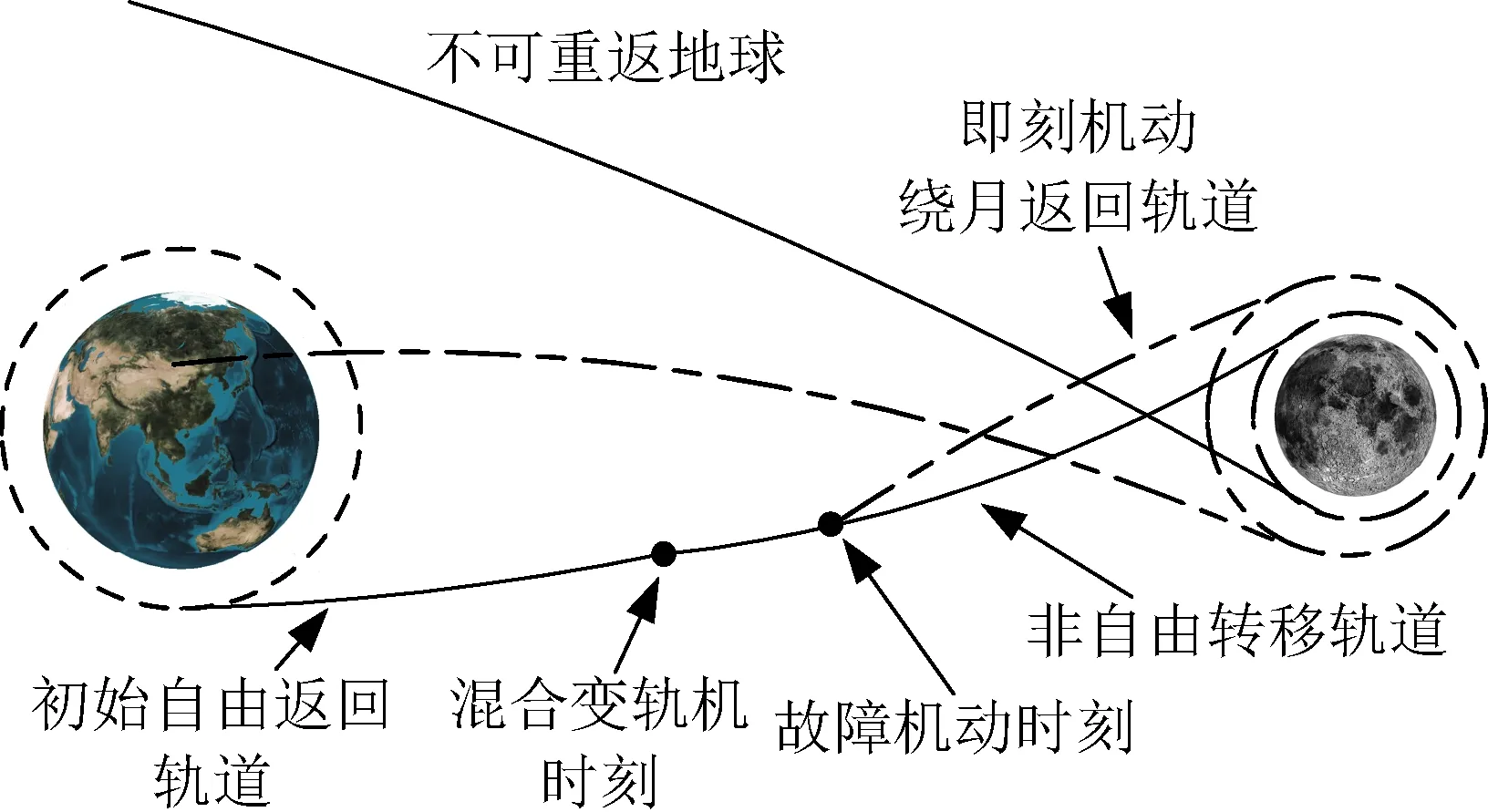
图3 即刻机动绕月返回示意Fig.3 Sketch of immediate transfer and flying by the moon

δF(Xmf)=CδXmf
(5)
(6)
(7)
其中A2为Xmf的雅克比矩阵。
联立方程(4)~(6),得到完整即刻机动绕月返回约束变量与初始状态变量的关系:
(8)
其中,F(Xf)=[F(Xrf),F(Xmf)],Xf=[Xrf,Xmf]T。对于给定的故障发生后即刻返回时刻,通过微分方程(8)不断迭代修正,可以确定到达给定的再入高度与再入角所需要的速度增量。
1.3 方式三:绕月后机动返回
绕月后机动返回的应急模式是指当航天器进入非自由返回阶段发生故障后,不立即进行轨道机动,而是绕过月球后,再选择合适的时机进行应急机动。这种模式通过利用地月空间三体区高势能[15]的特点,以此期望实现降低速度增量的应急机动模式,其机动关系如图4所示。

图4 绕月后机动返回示意Fig.4 Sketch of transfer after spacecraft flying by the moon

δF(Xrf)=BδXrf=BA1δXt
(9)
利用方程(9),通过调整各个方向上的速度增量,可以解得绕月后机动返回总的速度增量与转移时间。
2 应急返回轨道特性分析
对于载人地月混合轨道的应急返回轨道,关注的重点应聚焦于机动所需的速度增量与转移需要的时间。本文着重对这两个要素进行特性分析。
2.1 直接返回方式
对于直接返回方式,由第1.1小节的分析可知,应急返回所需的速度增量与应急机动发生时刻和应急返回转移时长等要素有关。图5给出了不同应急机动时刻与不同转移时长的关系。
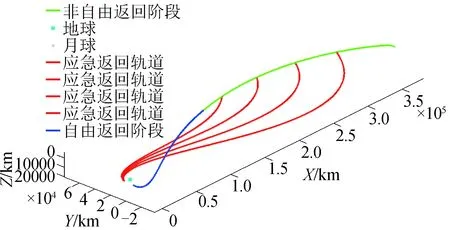
图5 不同时刻直接返回示意Fig.5 Sketch of direct return at different time
为分析不同应急机动时刻、转移时长与速度增量的关系,本文假设初始自由返回轨道瞄准的目标环月轨道近月点高度为200 km,轨道倾角为175°,混合变轨时刻为近地轨道加速后的24 h,轨道瞄准的目标环月轨道近月点高度为200 km,轨道倾角为110°,返回地球时再入高度为120 km,再入角为-6°。其特性如图6所示。图7为不同应急机动时刻下航天器在会合坐标系下的势能变化情况。
图6给出了不同变轨时刻与返回时长需要速度增量的等高线图。由图6可以看出,对于不同的应急机动时刻,速度增量出现先降低后增加的趋势,与图7中航天器的势能变化趋势基本一致,符合在高势能位置变轨需要的速度增量较少的基本原理[14]。
图6 直接返回转移时间与速度增量特性Fig.6 Characteristics of transfer time and velocity increment in direct return
图7 直接返回不同机动时刻的势能Fig.7 Potential energy of variant transfer moments in direct return
2.2 即刻机动绕月返回方式
直接返回的方式虽然返回时间较短,但需要的速度增量较大。即刻绕月返回方式期望通过月球借力改变航天器飞行方向,以达到降低速度增量消耗的目的。
与第2.1小节中采用的混合轨道相同,在故障发生后即刻进行一次轨道机动,实现绕月返回。图8给出了不同时刻应急机动绕月返回所需要的速度增量。由图8可知,随着飞行时间的增加,起初速度增量随之缓慢增加,但当飞行器进入月球影响球后的一段时间,速度增量会急剧增加。由于距离混合变轨时间越长,飞行器偏离原自由返回轨道相对越远,因此绕月重返地球的代价会越大。
只考虑进入月球影响球前的状态,图9给出了飞行器到达月球影响球之前的速度增量与总共飞行时间的变化情况。由图9可以看出,若故障发生在月球影响球之前,则应急返回所需的速度增量小于80 m/s,总的转移时间为4.5~5.8 d。
图8 即刻机动绕月返回速度增量Fig.8 Transfer velocity increment of immediate transfer and flying by the moon
图9 到达月球影响球前返回速度增量和总时间Fig.9 Transfer velocity increment and total time before getting into lunar sphere of influence
2.3 绕月后机动返回方式
由第2.1小节与第2.2小节中的分析可知,当载人航天器飞临月球附近时,直接返回与即刻绕月返回应急方式的速度增量急剧增加。考虑通过飞行器绕过月球后进入高势能区后再进行机动,以期望降低应急返回的速度增量。不同时刻绕月后返回示意如图10所示。
图11分析了不同飞行时刻实施应急机动、返回时长与应急返回所需速度增量的关系。对于应急机动时刻,机动时刻越靠后,需要的速度增量越少,与图12中势能随着应急机动时刻的增加而增大的趋势一致,符合高势能位置变轨需要的速度增量较少的基本原理。
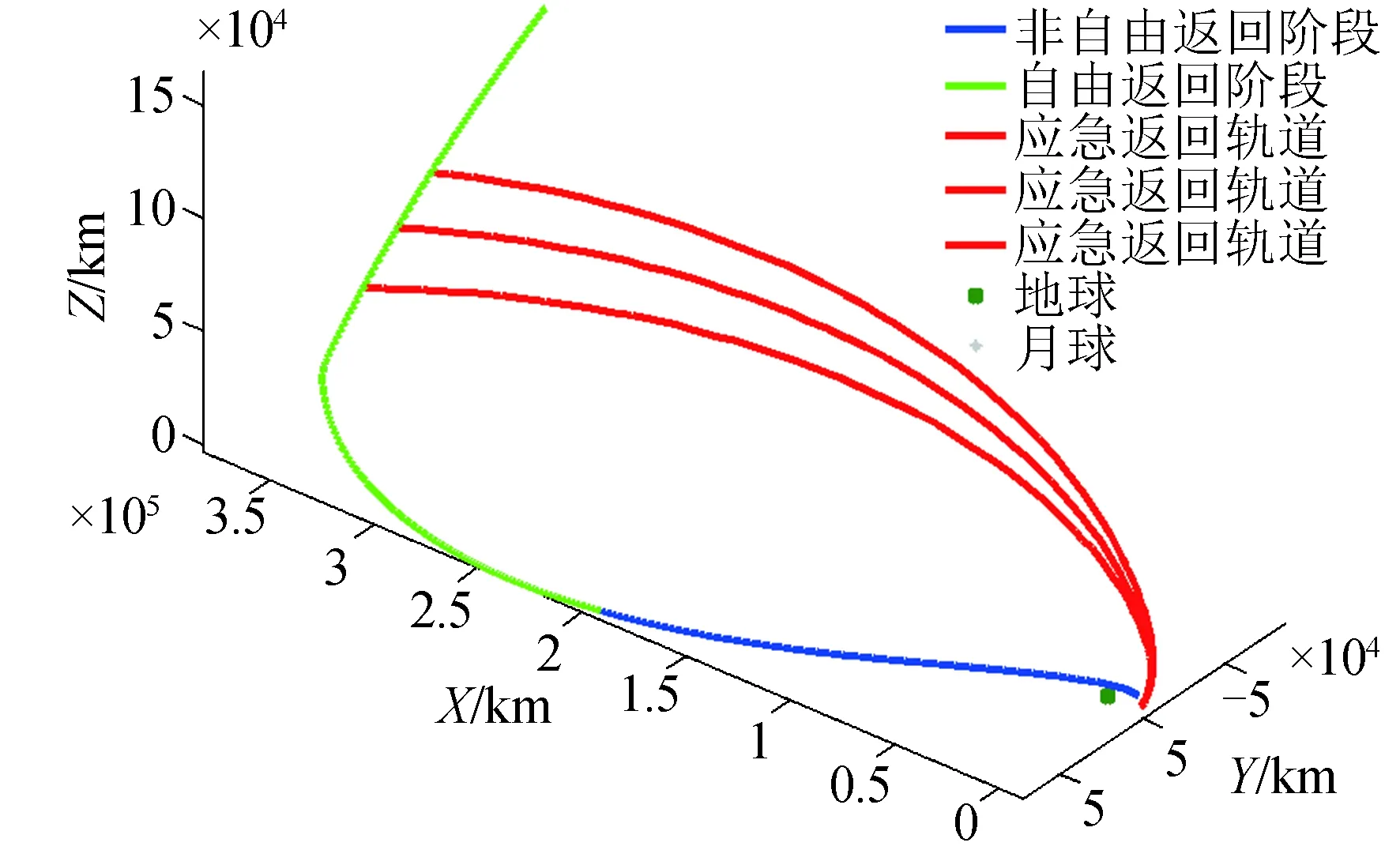
图10 不同时刻绕月后机动返回示意Fig.10 Sketch of transfer after spacecraft flying by the moon at different times
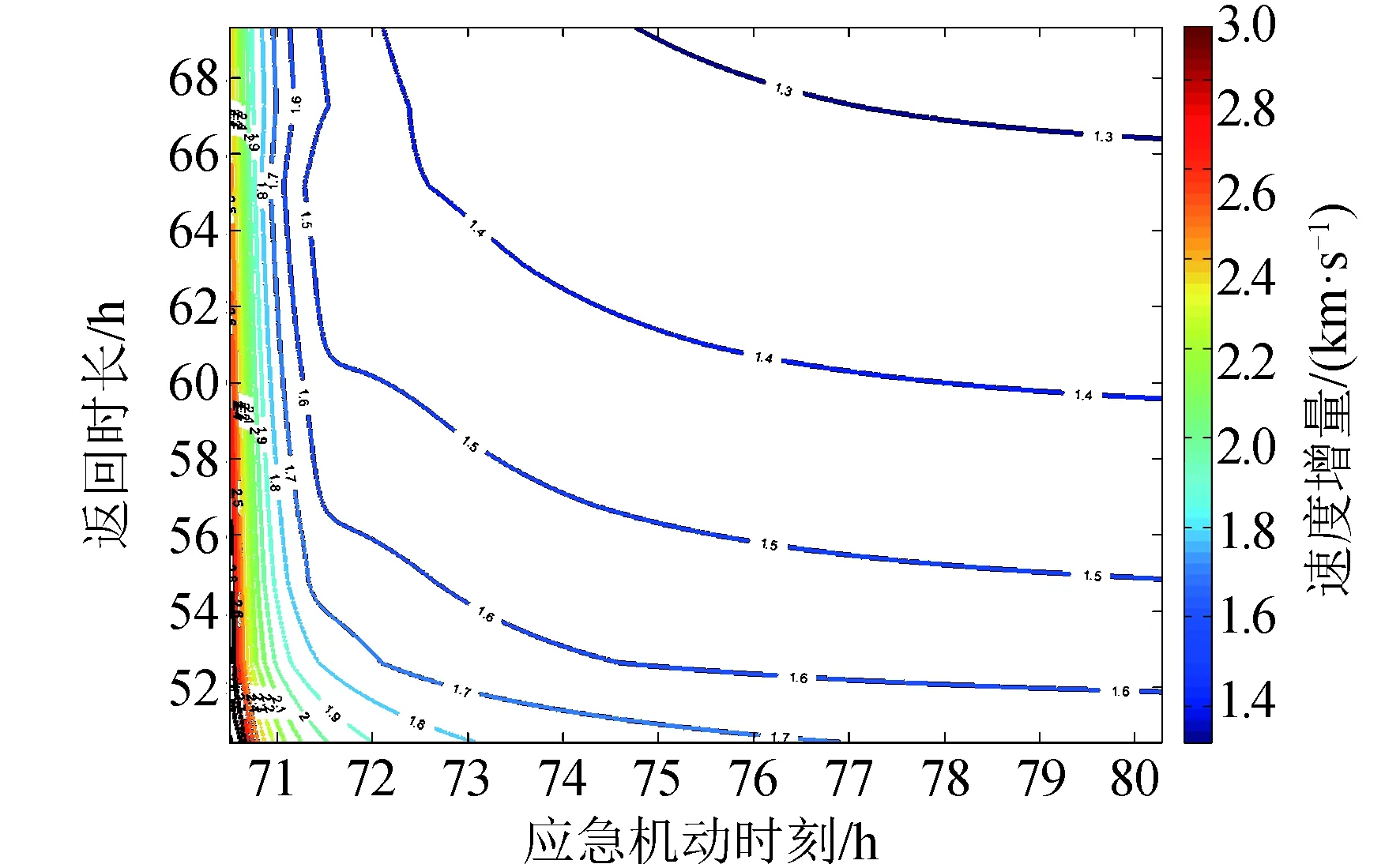
图11 不同时刻绕月返回转移时间与速度增量特性Fig.11 Characteristics of transfer time and velocity increment
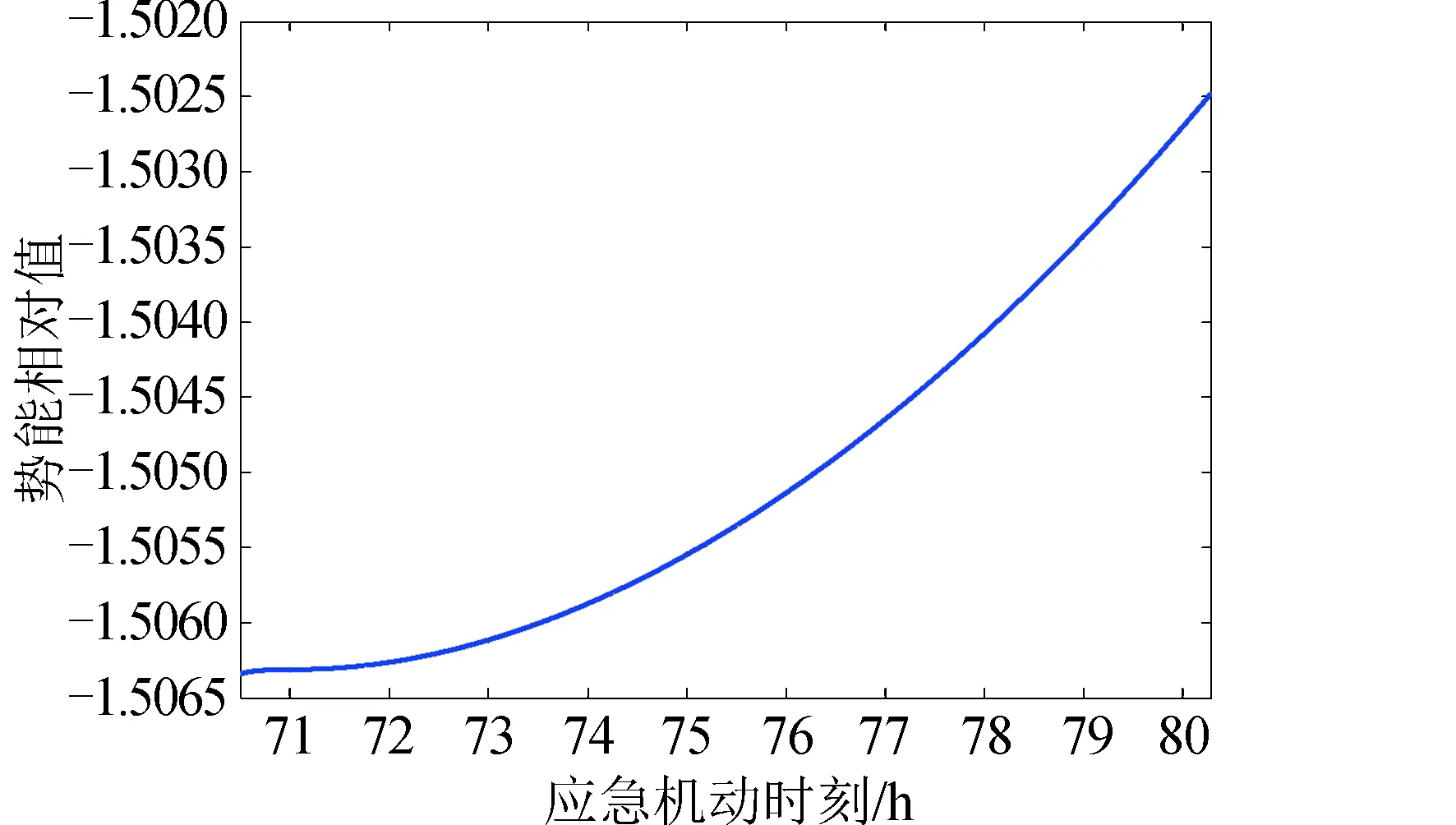
图12 绕月后机动返回不同机动时刻的势能Fig.12 Potential energy of variarit transfer moments
3 结束语
通过对载人地月混合轨道一次脉冲应急返回轨道的设计与特性分析,可以得到以下结论:
1) 对于直接返回的应急策略,转移时间相对较短,但速度增量较大,可以选择合适的机动时刻以降低应急机动的速度增量。
2) 即刻机动绕月返回的方式,在到达月球影响球之前可显著降低应急机动的速度增量,转移时间小于自由返回轨道转移的周期;当载人航天器到达月球附近时,转移需要的速度增量急剧增大,不适用于实际工程的应用。
3) 对于绕月后机动返回的策略,离开月球越远,返回需要的时间越短,所需的速度增量越少。当飞行器在地月转移中距离月球较近时,可以考虑使用此类应急策略。
