行星轮式大蒜插播机播种直立度优化与试验
2020-04-09李天华黄圣海牛子孺侯加林吴彦强李玉华
李天华,黄圣海,牛子孺,侯加林,吴彦强,李玉华
行星轮式大蒜插播机播种直立度优化与试验
李天华1,2,黄圣海3,牛子孺1,2,侯加林1,2※,吴彦强1,2,李玉华1,2
(1. 山东农业大学机械与电子工程学院,泰安 271018; 2. 山东省农业装备智能化工程实验室,泰安 271018;3.中国农业大学工学院,北京 100089)
大蒜机械化播种的植入环节中,在蒜种-土壤-触土部件强耦合作用下,正头后的蒜种直立度极易变低,如何“保姿植入”成为亟待解决的关键技术。针对此问题,该文以行星轮式大蒜插播机为研究对象,对插播鸭嘴的尖部运动轨迹进行分析,明晰了影响植后蒜种直立度的关键因素为插播鸭嘴的线速度、开启相位角及插播鸭嘴张开角度与凸轮凸起段对应的圆心角之比(开口速比)。运用Box-Benhnken中心组合试验方法对插播鸭嘴的线速度、开启相位角、开口速比进行三因素三水平二次回归试验设计,进行了插播试验,采用Design-expert软件建立响应面数学模型,对影响直立度的关键参数进行了综合优化,求解出最优工作参数组合为插播鸭嘴的线速度200 mm/s,开启相位角20°,开口速比2。大田试验结果表明,最优参数作业的蒜种直立度均值为63.2°,较优化前提高了21.8%,满足大蒜种植的蒜种直立度要求。
农业机械;优化;大蒜播种机;行星轮;直立度;保姿植入
0 引 言
大蒜是重要的经济作物,中国是大蒜第一生产大国,2018年种植面积达37.9~40.5万hm2,占全球大蒜种植面积60%以上[1],但中国大蒜播种主要依靠人力,工作强度大、效率低、成本高。现有的播种机械易发生漏播、重播现象且入土后的蒜种直立度偏低,影响大蒜产量和品质。先进播种机械的缺乏已成为制约中国大蒜行业快速发展的瓶颈问题[2]。
越来越多的学者开展了大蒜单粒取种和正头技术研究,但主要集中在插播机构的创新设计[3-7]。Zhang等[8]设计了一种用于大蒜盒种植半自动试验台,实现大蒜的定向种植;Brajesh等[9]研制了适用于大蒜、丁香的播种机;Devesh等[10]、耿爱军等[11]分别设计了大蒜种植机、大蒜自动定向播种机,并进行了试验研究;Zhang等[12]研制一种播种机垂直播种结构;林悦香等[13]设计了一款弹簧夹持式大蒜直立播种机;韩秋燕等[14]设计了一种新型的插穴式自动定向大蒜播种机。张丽芬[15]设计了基于PLC控制技术的蒜瓣方向识别装置,实现了蒜种姿态的自动识别。研究发现,植入土壤过程中,正头后的大蒜在蒜种-土壤-植入部件强耦合作用下极易发生倾斜翻转,甚至发生蒜种被抛离蒜穴现象,造成播种失败,但是对蒜种保姿植入技术的研究还未见报道。插播机是实现蒜种保姿植入的核心部件,高性能的大蒜插播机能够确保蒜种保持“鳞芽朝上”的姿态植入土壤,满足种植农艺要求。
为提高大蒜机械化播种的植后直立度,攻克“保姿植入”技术难题,在项目组已有研究[16]的基础上,本文以大蒜插播机为研究对象,建立了大蒜插播模型,进行蒜种植入过程的运动学解析。以直立度均值为目标,对影响播种质量的关键参数进行分析与试验,分析各参数对作业性能的影响,并对插播机构进行优化,寻求最优作业参数组合,以期为大蒜播种机的设计与优化提供参考。
1 结构与工作原理
1.1 整机结构与工作原理
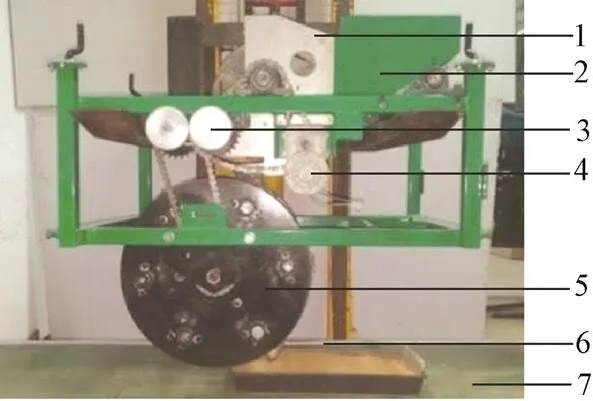
大蒜播种机结构如图1所示,由机架、种箱、排种装置、插播机、传动系统、压平辊及地轮组成。采用悬挂式结构与拖拉机配套,在拖拉机的带动下,地轮与地面摩擦输出动力至主轴,经调速机构将动力分别传递至调向齿轮与插播机,调向齿轮改变转向后将动力分别传递至种箱与排种器。排种器取得单粒蒜种后投入接种鸭嘴;插播鸭嘴将接种鸭嘴打开,若大蒜鳞芽朝下,将会从接种鸭嘴下部的孔中漏出并被接种鸭嘴与插播鸭嘴夹住,由于大蒜重心在上部,因此会以鳞芽为中心旋转180°左右,随后落入插播鸭嘴内,实现正头;相反,若大蒜鳞芽向上,由于重心在下,大蒜会保持直立姿态落入插播鸭嘴中,正头过程完成[16];随后插播机将蒜种插入土壤,并由压平辊压实,种植过程完成。

1.传动系统 2.机架 3.种箱 4.排种装置 5.接种鸭嘴 6.压平辊 7.插播机
1.2 插播机结构与工作原理
如图2所示,插播机包括插播圆盘、六角传动轴、行星轮系、主传动轴、插播鸭嘴、鸭嘴开合控制机构。其中行星轮系安装在插播圆盘上,行星轮系中的太阳轮与主传动轴同轴转动,获得动力,经中间齿轮将动力传递至行星轮,行星轮与六角传动轴同轴转动[17-18]。
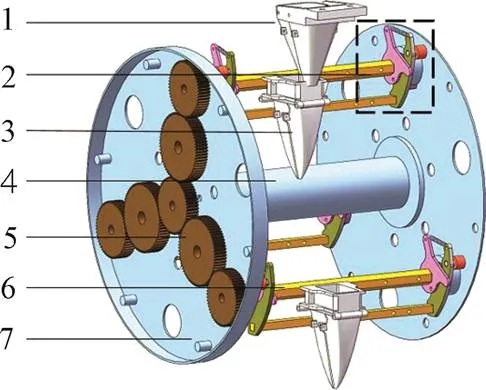
1.接种鸭嘴 2.鸭嘴开合控制机构 3.插播鸭嘴 4.主传动轴 5.行星轮系 6.六角传动轴 7.插播圆盘
图3a为鸭嘴开合控制机构,安装在六角传动轴与插播圆盘上随插播圆盘转动而转动;鸭嘴固连在六角传动轴一侧,六角传动轴与推杆固连,推杆通过轴销与耳板连接,可绕轴销转动,滚珠通过轴销与推杆连接。开口前,滚珠与凸轮的凸起(段)不接触,鸭嘴为闭合状态;开口时,滚珠开始沿段上行,推杆绕轴销转动,鸭嘴开始打开;闭合时,随插播转盘转动,在复位弹簧的作用下,滚珠从凸起处(段)开始下行,推杆反向转动,鸭嘴闭合。段的周向安装位置决定插播鸭嘴打开时的开启相位角(图4),段的凸起高度决定鸭嘴张开角度2(图3c),为保证蒜种从鸭嘴中顺利落入蒜穴,经多次预实验,确定插播鸭嘴斜边(转动中心至尖点连线)=100 mm,斜边与竖直方向的夹角=22°时,插播鸭嘴张开角度2为15°,bc段对应的圆心角1,即凸起上升角1,当1越小时,插播鸭嘴打开速度越大。定义开口速比为插播鸭嘴张开角度2与bc段对应的圆心角1之比,开口速比计算如式(1)所示。当开口速比越大时,同转速下,插播鸭嘴打开速度越大[19]。
1.复位弹簧 2.凸轮凸起 3.滚珠 4.耳板 5.轴销 6.推杆 7.控制凸轮
1.Reset spring 2.Bulge on the cam 3.Ball 4.Ear plate 5.Axle 6.Push rod 7. Cam for control
注:为插播鸭嘴闭合状态运动起始点;为插播鸭嘴闭合状态运动结束点及打开起始点;为插播鸭嘴打开过程结束点及开口状态运动起始点;为插播鸭嘴开口状态运动结束点及闭合起始点;1为凸轮凸起的上升角,(°);2为鸭嘴最大张开角度,(°)。
Note:is the starting point of the closed state movement of the inserting duckbill;is the ending point of the closed state movement and the starting open point of the inserting duckbill;is the ending point of the opening state movement and the opening state movement starting point of the inserting duckbill;is the ending point of the opening state movement and the closing starting point of the inserting duckbill;1is the rising angle of the bulge on the cam, (°);2is the maximum opening angle of duckbill, (°).
图3 开合控制结构及工作过程
Fig.3 Opening and closing control structure and working process
当插播鸭嘴插入土壤后,插播开合控制机构将插播鸭嘴打开,打开位置如图4所示,其中开启相位角为插播鸭嘴和中心点连线与轴的夹角[16]。
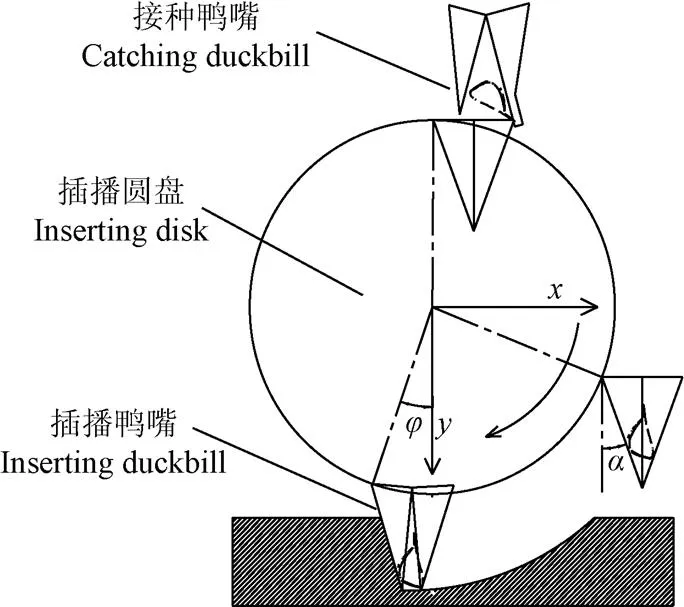
注:α为插播鸭嘴斜边与竖直方向上的夹角,(°);φ为插播鸭嘴和中心点连线与y轴的夹角,(°)。
2 插播鸭嘴运动轨迹与蒜种直立度分析
2.1 插播目标
插播鸭嘴的主要作用是保证将鳞芽向上的蒜种在植入土壤的过程中保持直立向上的姿态,避免被鸭嘴、土壤干涉而发生倾斜甚至翻转。蒜种的直立度由蒜种与水平面的夹角的平均值表示,直立度越高插播效果越好[20-21],如图5所示。
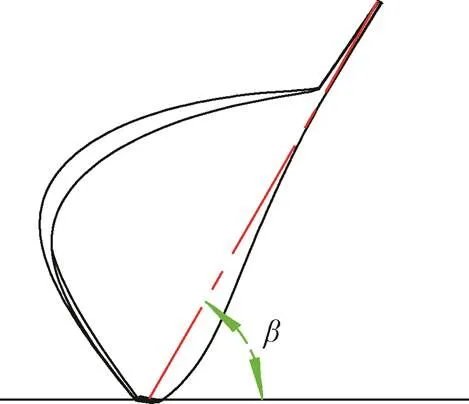
注:β为蒜种与水平面的夹角,(°)。
根据插播鸭嘴的运动学特性参数,运动轨迹、蒜种姿态和插播鸭嘴打开速度,需要满足的约束条件有:在满足蒜种植入的条件下蒜穴要尽可能小;蒜种插入蒜穴后周围土壤要迅速回填,确保蒜种植后不倾斜;植入后避免插播鸭嘴对蒜种产生二次干涉。
2.2 插播鸭嘴的运动轨迹与方程
2.2.1 尖点运动轨迹
调头后的蒜种在插播过程中仍然会出现倾斜甚至反转的现象,通过前期试验分析,该现象可能与插播鸭嘴的运动轨迹有关。图6为插播鸭嘴沿逆时针方向转动,前后2瓣鸭嘴的尖点相对地面的运动轨迹[22-23]。
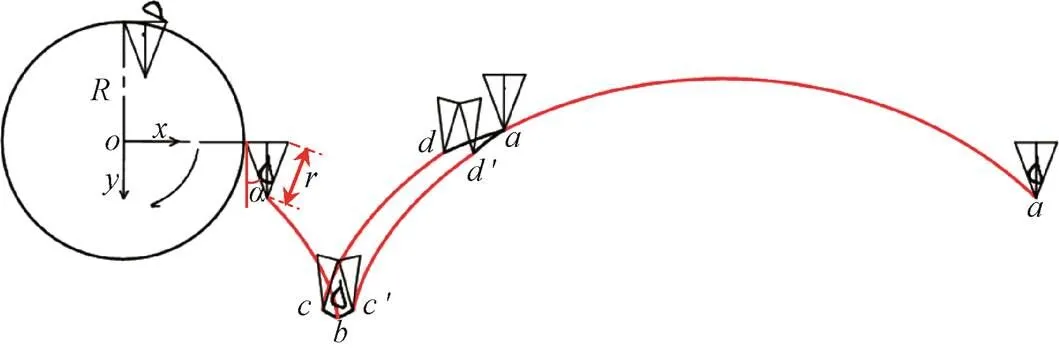
注:α为插播鸭嘴斜边与竖直方向上的夹角,(°);R为插播圆盘半径,r为插播鸭嘴转动中心(轴销)至尖点长度,mm;点a为闭合运动时鸭嘴尖点的位置,b为鸭嘴开始打开时鸭嘴尖点最低点的位置,c、c′为前后鸭嘴尖点最大打开位置,d、d′为鸭嘴开始闭合时的位置。
由图6可知,当插播鸭嘴尖点从点运行至点时为闭合状态,前后2个尖点重合,沿同一条曲线运动。段形成“茄状”;当运动至点时,前后2瓣鸭嘴分别向逆、顺时针方向打开,至、点时开口达到最大,并保持至、点,随后在运动至点的过程中闭合。
2.2.2 运动方程
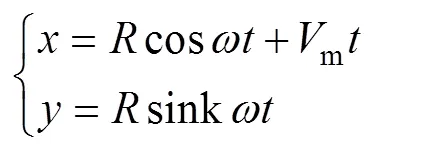
按照插播鸭嘴下落、开启、保持及闭合的过程,将其前后尖点运动轨迹共分为4段,分别对应式(2)~(8)。其中式(2)为插播鸭嘴闭合下落时,前后尖点重合的运动轨迹,即图6中段。
式(3)~(4)为插播鸭嘴下落至最底部后,开启阶段(即图6中点鸭嘴打开)的前、后尖点运动轨迹分离,段、段分别对应为前、后侧尖点运动轨迹方程式(3)、式(4):
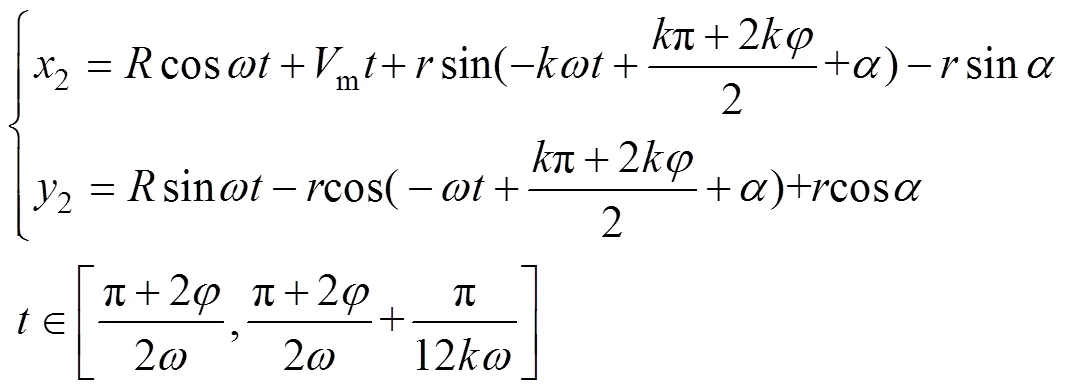
式(5)~(6)为插播鸭嘴达到最大开口后,在保持开口状态下的运动方程,即图6中插播鸭嘴前后尖点在′、段轨迹:
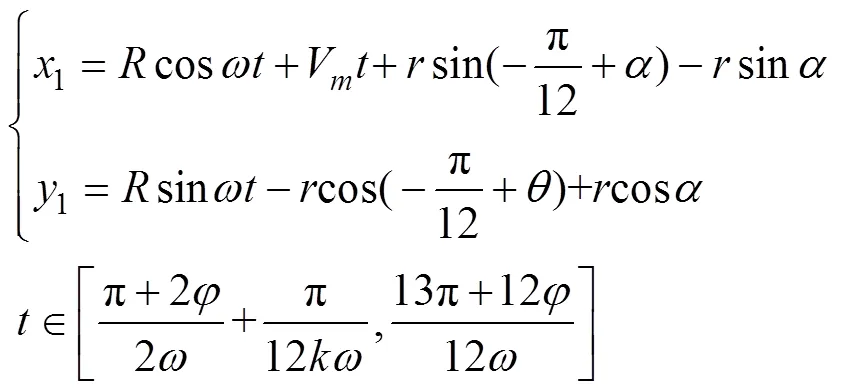
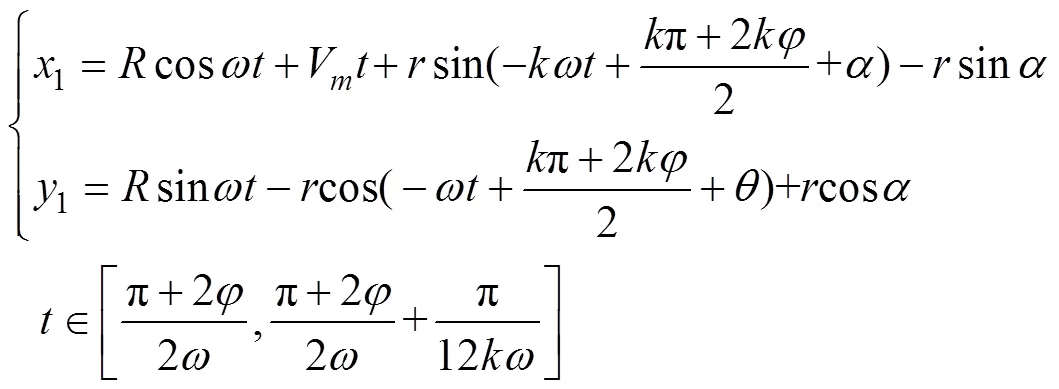
式(7)~(8)为插播鸭嘴离开蒜穴前从最大开口开始闭合后的方程,即图6中前后尖点′′、段轨迹:
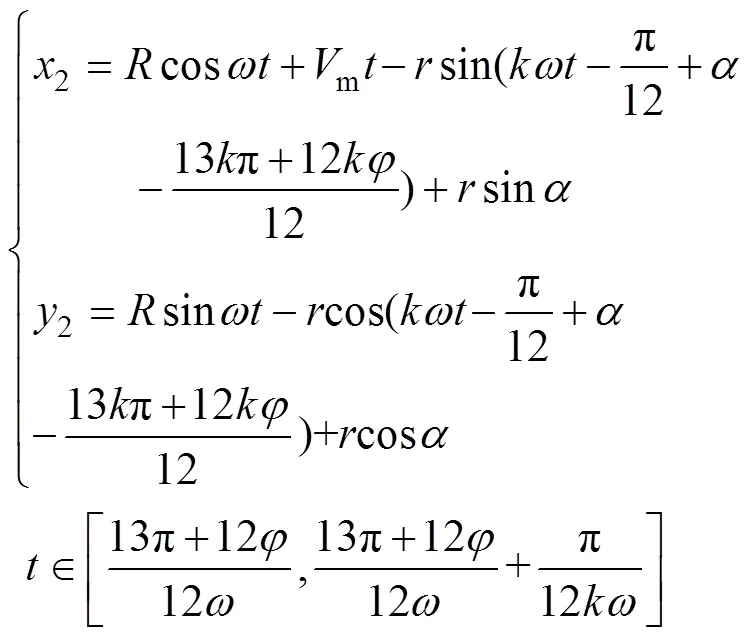

式中V为插播鸭嘴线速度,mm/s;为插播圆盘半径,mm;为插播鸭嘴转动中心(轴销)至尖点长度,mm;为转动中心(轴销)至尖点连线与竖直方向的夹角,rad;为插播鸭嘴转速,rad/s;为开口速比;为开启相位角,rad。
2.3 运动参数对插播鸭嘴轨迹影响
由式(2)~(8)可知,影响插播鸭嘴运动轨迹的参数主要为插播鸭嘴线速度V与机器作业行进速度的比值,插播鸭嘴开启相位角,开口速比等。
2.3.1 插播鸭嘴圆周速度与机器前进速度之比
将式(2)~(8)导入CAXA软件中,其中=191 mm,=100 mm,=22°,机器作业行进速度为250 mm/s,计算得到=1.4、1.2、1、0.8、0.6时的运动轨迹,如图7所示。
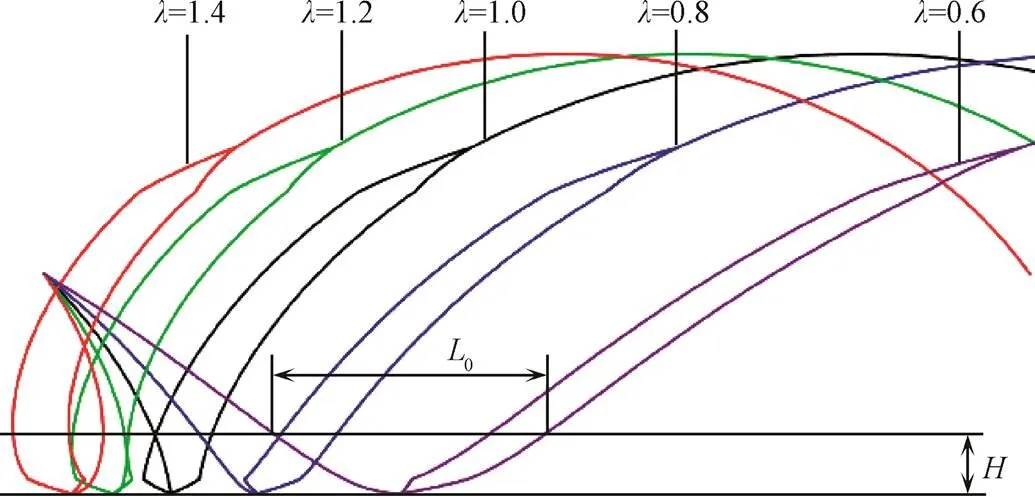
注:H为鸭嘴入土深度,mm;L0为蒜穴开口长度,mm;λ为插播鸭嘴线速度与机器行进速度之比。
当>1时,插播鸭嘴插入土壤最深处时圆周速度大于机器前进速度,鸭嘴相对于地面向后运动,由图可知与=1相比,蒜穴较大,且前侧鸭嘴会打翻蒜穴中的蒜种;当<1时,插播鸭嘴圆周速度小于机器前进速度,鸭嘴相对于地面向前运动,后侧鸭嘴会打翻蒜穴中的蒜种;当=1时,鸭嘴处于图6中点时,鸭嘴相对于地面静止,即圆周速度与机器前进速度相等,鸭嘴前后对称打开,对蒜种无二次干涉,因此=1符合工作要求。
2.3.2 插播鸭嘴开启相位角
取=1,=0、10、20、30°分别代入式(2)~(8),得到图8所示插播鸭嘴打开过程的尖点运动轨迹。由图8可知,决定插播鸭嘴的开启位置。越大,鸭嘴开启时的插入深度越小(离地面越近),相对于蒜穴中心点(最深点)0的距离越大;当=30时,插播鸭嘴完全打开并即将离开蒜穴。因此,开启相位角越大蒜种下落越晚,且越容易脱离蒜穴,导致曝种现象。
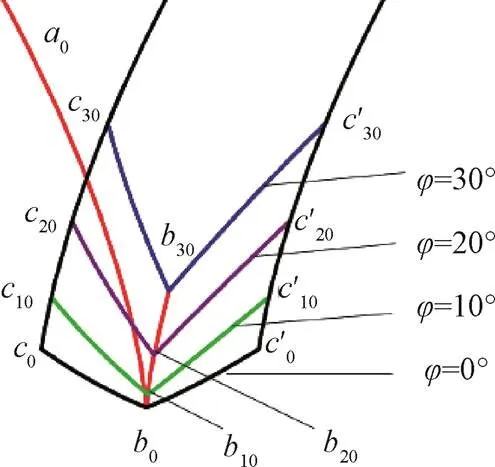
注:a0为插播鸭嘴运动起点,b0、b10、b20、b30分别为开启相位角φ=0°、10°、15°、20°时插播鸭嘴尖点开始开口点,c0、c10、c20、c30、c0′、c10′、c20′、c30′分别为插播鸭嘴左右尖点的开口最大点。
2.3.3 插播鸭嘴开口速比
图9是插播鸭嘴开口速比=0.5、1、1.5、2时插播鸭嘴尖点运动轨迹,由图9可知,插播鸭嘴在点开始打开,当=0.5时,至0.5、0.5′点时完全打开;当=2时,插播鸭嘴由点至2、2′点完全打开。因此,开口速比影响蒜种开始下落时间,且越大蒜种下落越早,越有利于回填土壤对蒜种的夹持;另外当开口速比过小时插播鸭嘴将夹持蒜种脱离蒜穴。

注:b为插播鸭嘴尖点开始开口点,c0.5、c1、c1.5、c2、c0.5′、c1′、c1.5′、c2′分别为开口速比k=0.5、1、1.5、2时插播鸭嘴左右尖点开口最大点。
3 室内试验
3.1 试验方法
为验证理论分析的正确性,搭建了大蒜插播试验台,如图10所示,试验台包括排种器、种箱、传动系统电机、插播机、传送带、土槽等。采用传送装置模拟播种前进运动,土槽模拟植入土壤,填充砂性土,土壤含水率为7.2%。传送装置由Y VF2-80M2-4型变频电机带动,功率为1.5 kW,通过变频器调速改变传送速度。插播机电机为FECC12-600型直流电机,功率为0.6 kW,利用串接的调速器实现调速。在山东农业大学农业机械化及其自动化实验中心进行室内试验。每组参数下播种100粒Ⅱ型苍山大蒜样本,统计插播后蒜种直立度平均值,采用式(9)计算传送带每小时传送距离。
=60(9)
式中插播鸭嘴转速,r/min;为大蒜株距,mm;为插播机鸭嘴个数。
1.排种器 2.种箱 3.传动系统 4.电机 5.插播机 6.土槽 7.传送带。
蒜种直立度测量方法如图11所示,将一根直杆与蒜种鳞芽共线,测量直杆末端到地面的高度,通过式(10)计算蒜种鳞芽与地面的夹角。
1.直杆 2.横杆 3.铅锤 4.横杆支架
1.Straight rod 2.Crossbar 3.Plummet 4.Crossbar bracket
注:为大蒜与水平面夹角,(°);为直杆长度,mm;为直杆末端到地面的高度,mm。
Note:is the angle between the garlic and the horizontal plane, (°);is the length of the straight rod, mm;is the height from the end of the straight rod to the ground, mm.
图11 蒜种直立度测量
Fig.11 Garlic upright measurement
改变图3中段对应的圆心角来改变开口速比,通过加工段不同的凸轮凸起,来实现开口速比的调整,图12为不同开口速比的凸轮。
通过调整凸轮凸起段在机器中安装的周向位置来改变开启相位角,即调整图3中线段与坐标轴的夹角,凸轮凸起安装时与坐标轴的夹角越大,插播鸭嘴开启相位角越大。设定鸭嘴转动至最下方时,开启相位角为0°。

图12 不同开口速比的凸轮凸起
3.2 单因素试验
参照2.3节中各参数对插播鸭嘴运动轨迹的影响分析,在=1的条件下,各组参数取值分别为:=10°,=1.5,V=100、200、300、400、500 mm/s;m300 mm/s,=10°,=0.5、1、1.5、2、2.5;m300 mm/s,=1.5,=0、10、20、30、40°。试验结果如图13所示,由图13a可知,随插播鸭嘴线速度m的增加蒜种直立度降低;由图13b可知,随插播鸭嘴开口速比增大直立度整体呈上升趋势,但在=1.5时,直立度较低,而在=2.5时凸轮出现明显震动;由图13c所示,随插播鸭嘴开启相位角的增大,直立度增大,但当开启相位角大于20°后,蒜种直立度急速下降,在开启相位角40°时,大部分蒜种被带出地面,无法完成正常播种。
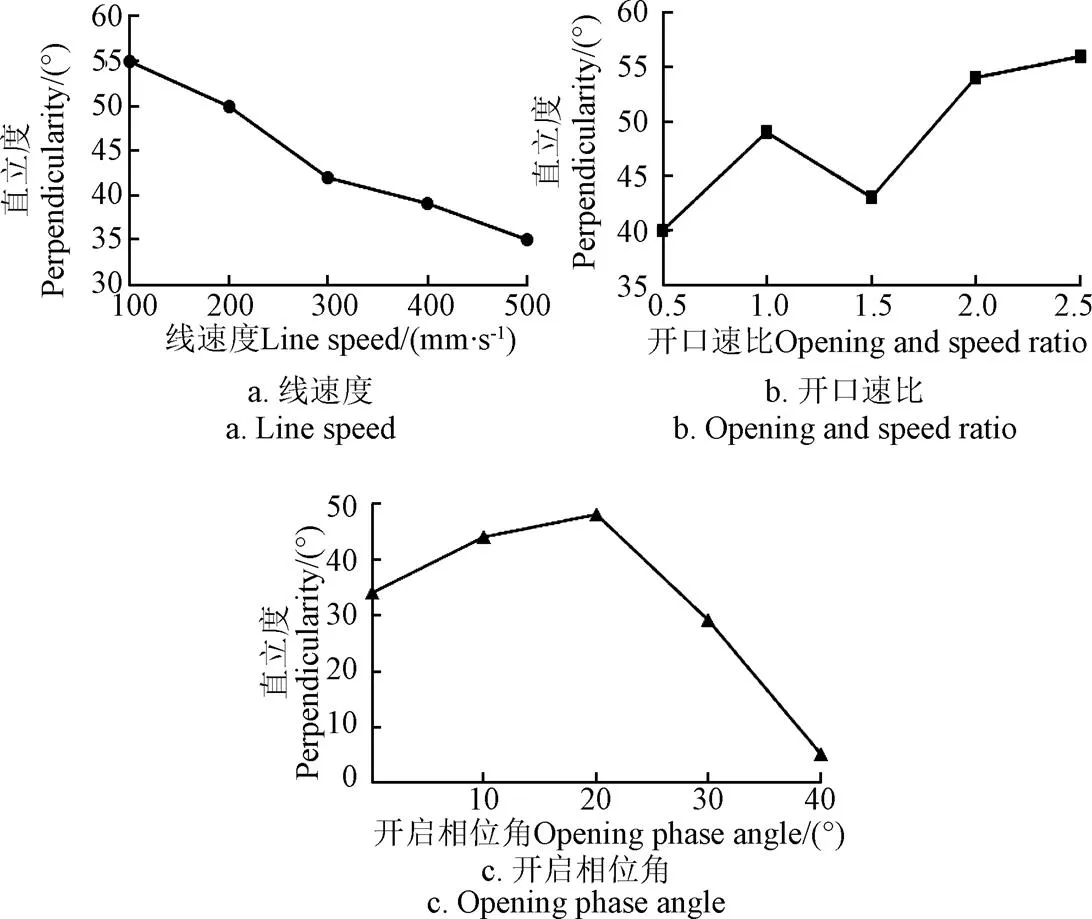
图13 插播鸭嘴参数对直立度的影响
3.3 正交试验
为了获得上述3个因素的最优参数值,选择Box-Behnken中心组合设计理论进行试验[24-25]。由单因素试验可知插播鸭嘴线转速度、开启相位角及开口速比均影响插播作业质量,因此,以鳞芽与地面夹角的平均值表征插播机工作性能,平均值大表征蒜种直立度高,插播效果好。根据单因素试验确定插播鸭嘴线速度取值范围为200~500 mm/s,其开启相位角范围为0~20°,开口速比范围为1~2。每组样本个数为20,重复5次取平均值,插播鸭嘴各试验因素和水平如表1所示。

表1 试验因素与水平
3.3.1 试验结果
根据Box-Behnken试验原理设计插播鸭嘴3因素3水平分析的试验[26-27],试验方案与响应值见表2,其中1、2、3表示各因素编码值。
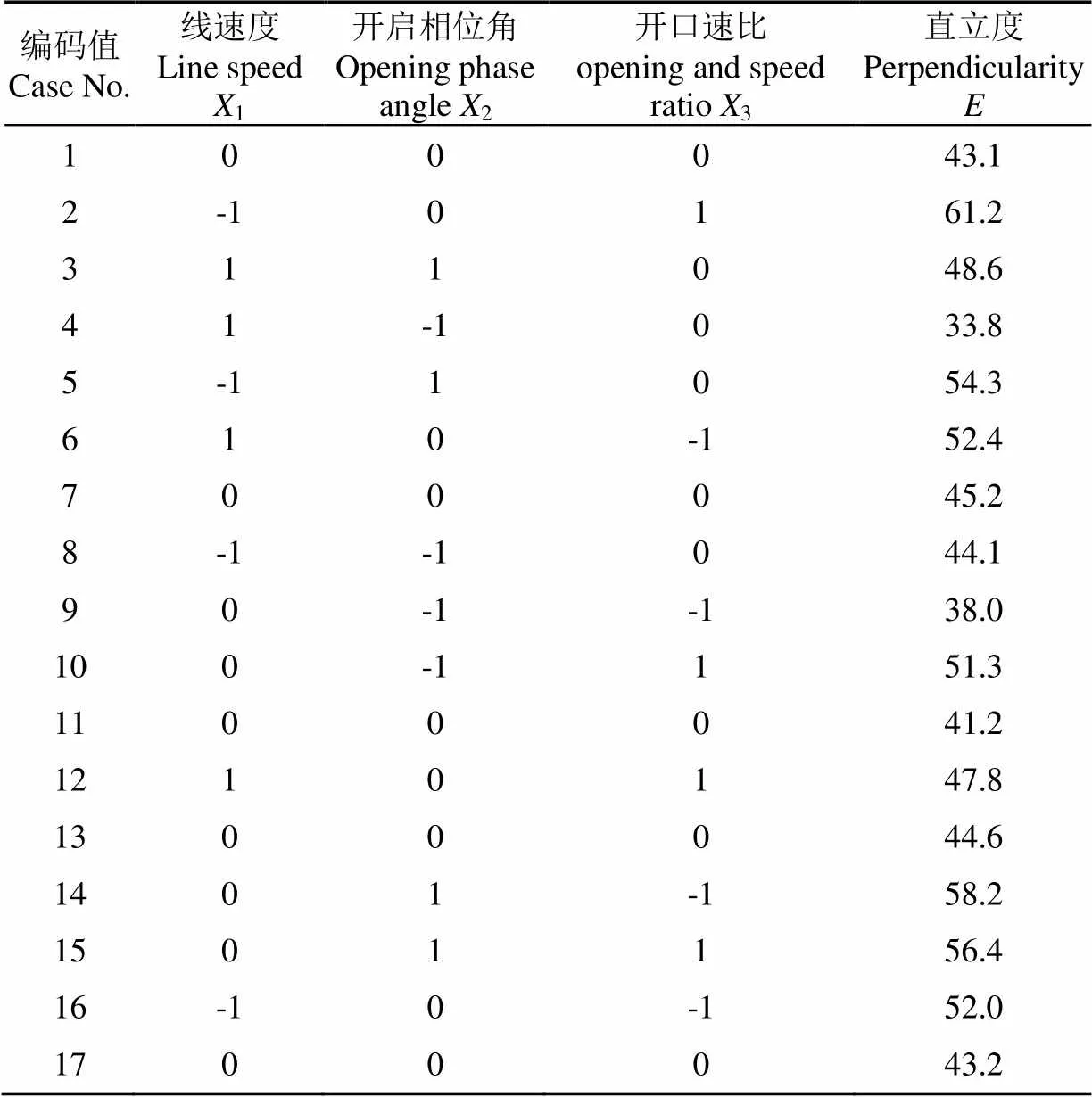
表2 仿真试验设计与响应值
3.3.2 回归方程与显著性检验
根据表2,利用Design Expert8.0.6.1软件开展多元回归拟合分析[28-30],建立直立度均值对插播鸭嘴线速度水平1、开启相位角水平2、开口速比水平3的二次多项式响应面回归模型,如式(11)所示。
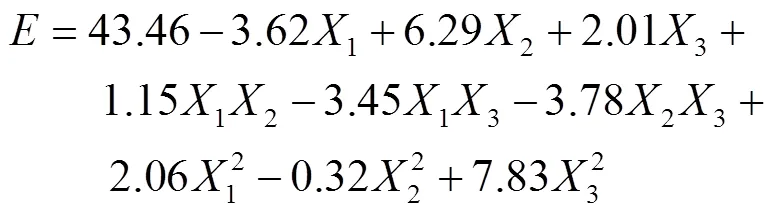
对回归方程进行方差分析,如表3所示。由表3可知,直立度均值模型的<0.000 1,表明回归模型极显著,失拟项的>0.05,表明回归方程拟合度高。模型决定系数2值为0.980 7,表明这个模型可以解释98%以上的评价指标。模型信噪比为23.875大于4,表明模型较优可以用于参数优化。各回归项对方程的影响通过值大小反应,模型中有6个回归项影响极显著(<0.01),分别为1、2、3、13、23、32;1个回归项对模型影响显著(<0.05),为22,有2个回归项对模型影响不显著(>0.05),分别为12、22。剔除不显著项,对模型进行优化,如式(12)所示,分析优化后模型的值(<0.000 1)与失拟项值(0.490)可知优化模型可靠。

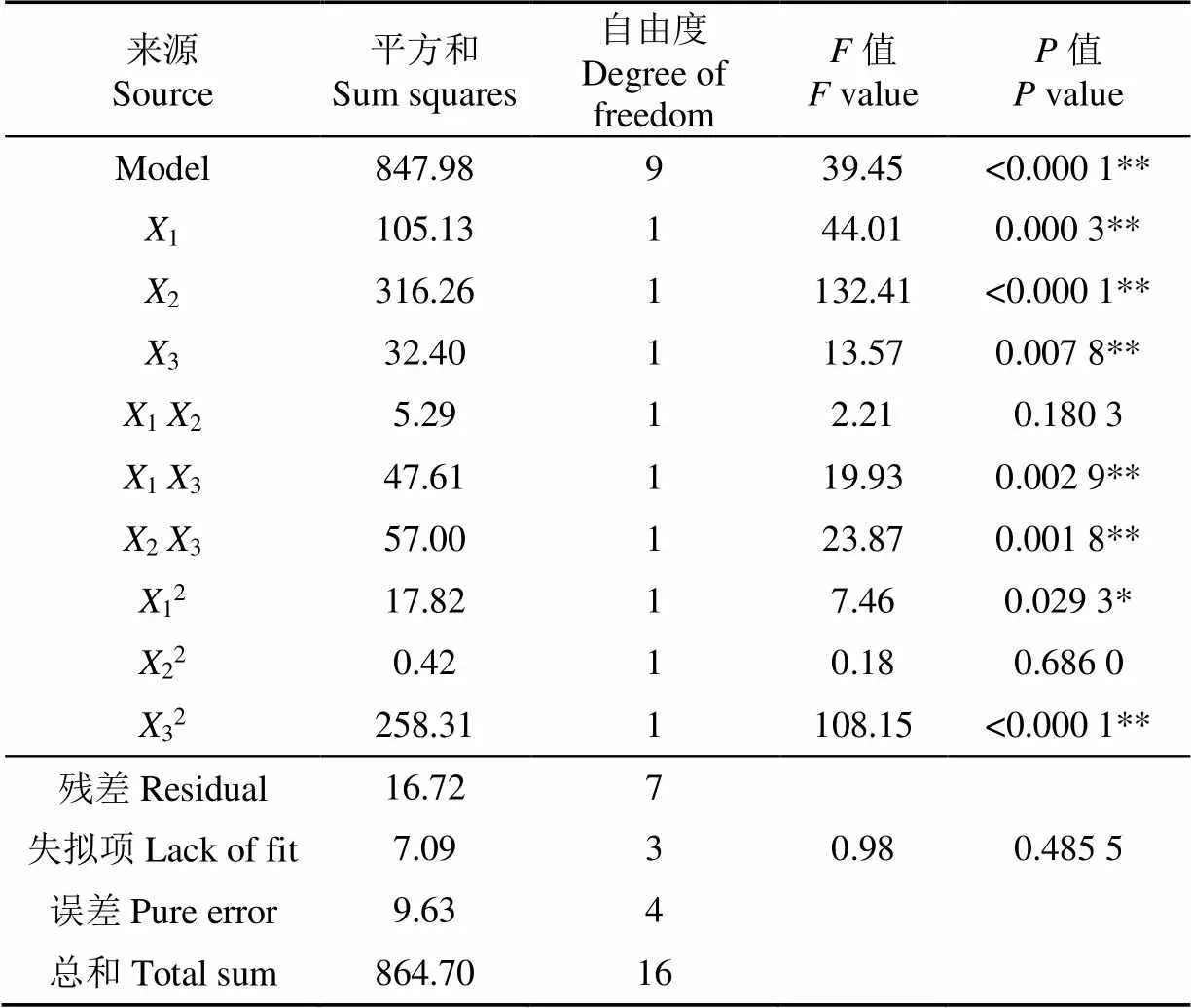
表3 回归方程方差分析
注:<0.01(极显著,**);<0.05(显著,*)。
Note:<0.01 (highly significant, **);<0.05 (significant, *).
3.3.3 交互因素对播种直立度影响规律分析
根据回归方程分析结果,利用Design Expert8.0.6.1软件绘制响应面,采用响应面图分析插播鸭嘴线速度、开启相位角、开口速比交互因素对响应值的影响,如图14所示。
图14a为插播鸭嘴开口速比位于中心水平(1.5)时,插播鸭嘴线速度与开启相位角对直立度均值交互作用的响应面图,可知直立度均值随线速度的增大呈现下降趋势,随插播鸭嘴开启相位角的增加呈上升趋势,观察响应面可知当开启相位角为20°、线速度在200 mm/s左右时,直立度均值最大。降低插播鸭嘴线速度,增大开启相位角,有利于直立度的提高。插播鸭嘴线速度与开启相位角交互作用对直立度均值影响不显著(>0.05)。
图14b为插播鸭嘴开启相位角位于中心水平(10°)时,线速度与开口速比对直立度均值交互作用的响应面图,由图可知,开口速比在1~1.1区间内,插播鸭嘴线速度变化对直立度均值影响不显著;开口速比在1.1~2区间内,直立度均值随插播鸭嘴线速度的增大而逐渐降低,不同开口速比下变化程度不同。直立度均值随开口速比的增大呈现先下降后上升趋势,且不同插播鸭嘴线速度下变化程度不同。从图中可以看出,线速度为200 mm/s且开口速比为2时,直立度均值最大。线速度与开口速比交互作用对直立度均值具有显著影响(<0.05)。
图14c为插播鸭嘴线速度位于中心水平(300 mm/s)时,开启相位角与开口速比对直立度均值交互作用的响应面图,由图可知直立度均值随开启相位角的增大而逐渐升高,不同开口速比下变化程度不同。直立度均值随开口速比的增大呈现先下降后上升趋势,且不同插播鸭嘴线速度下变化程度不同。从图中可以看出,开启相位角为20°且开口速比分别为1和2时,直立度均值较大。开启相位角与开口速比交互作用对直立度均值具有显著影响(<0.05)。
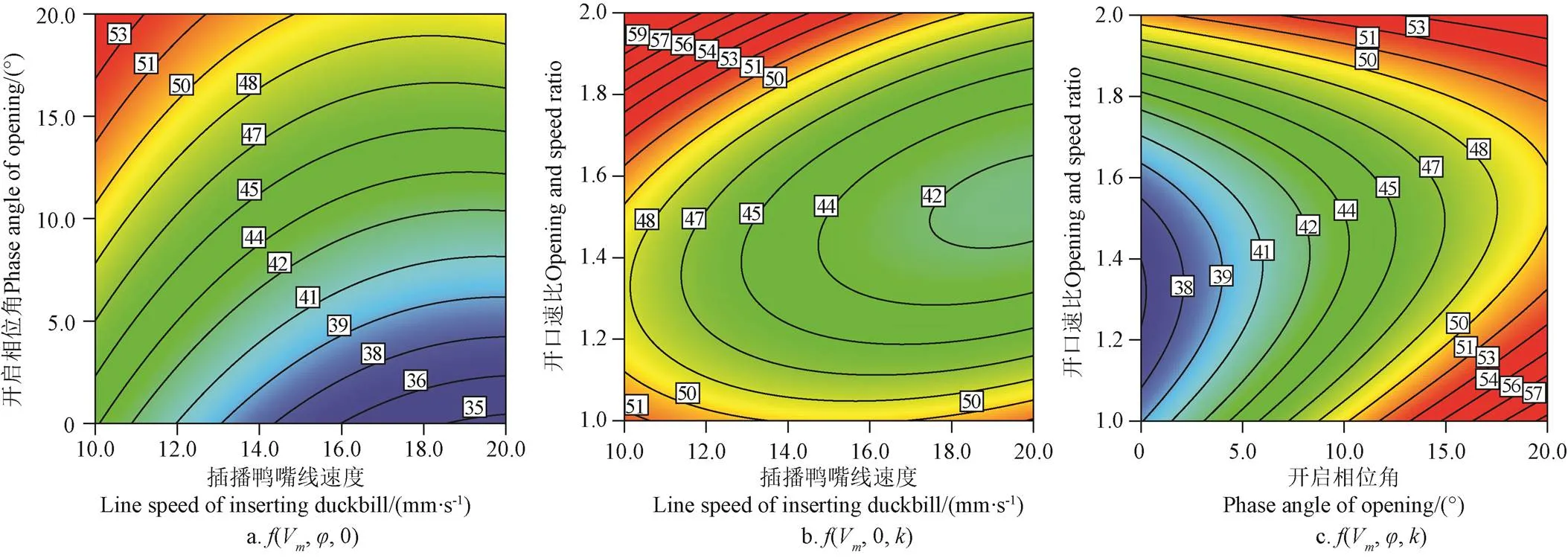
图14 插播鸭嘴线速度、开启相位角及开口速比对直立度均值的影响
3.3.4 参数优化
以蒜种直立度均值最大为优化目标,用Design Expert8.0.6.1软件对插播鸭嘴线速度、插播鸭嘴开启相位角以及开口速比等进行参数优化,目标函数及数学模型为:
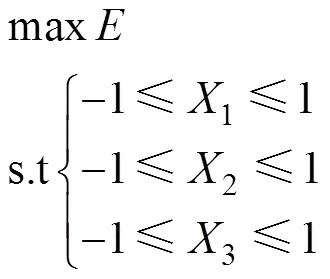
优化后得到各参数为转速10 r/min,开启相位角20°,开口速比2,蒜种直立度均值63.5°。对优化后的模型进行室内试验验证,得到蒜种直立度均值为64.3°,与预测值相符。
4 田间试验
4.1 试验条件
为了验证优化后插播机的工作性能,在山东省安丘市进行了试验,试验地土壤类型为壤土,土壤含水率为约为8.1%,大蒜品种为苍山大蒜,试验前对地块进行旋耕碎土、整平,插播作业如图15所示。
图15 田间试验
试验仪器与设备:拖拉机,与安丘市丰益机械厂共同研制的2BYCF-7新型悬挂式精准大蒜播种机,蒜种直立度测量装置(如图11),水分测定仪,卷尺,钢尺等,新型悬挂式精准大蒜播种机与拖拉机采用三点挂接。
4.2 试验方法与结果
大田试验方法同室内试验,选取优化后的插播鸭嘴参数进行试验,即线速度为200 mm/s,开启相位角为20°,开口速比为2。取样时选取插播鸭嘴线速度稳定的区域,试验样本个数为100,重复5次取平均值,以蒜种直立度均值作为评价指标。蒜种直立度测量方法同室内实验,计算方法同式10。如表4统计结果,田间试验蒜种直立度为63.2°,与优化前(出厂参数:鸭嘴线速度250 mm/s,开启相位角15°和开口速比1.5)比直立度提高了21.8%,满足大蒜播种直立度的要求。

表4 田间试验蒜种直立度
5 结 论
1)结合大蒜播种机及行星轮式插播机结构与工作原理,对影响插播鸭嘴尖点运动轨迹的主要因素进行了理论分析及轨迹仿真,得出主要影响因素分别为插播鸭嘴的线速度、开启相位角、开口速比。
2)对插播鸭嘴的角速度、开启相位角、开口速比进行单因素试验,研究了各因素对蒜种直立度的影响规律,确定了插播鸭嘴的角速度、开启相位角、开口速比取值范围分别为200~400 mm/s、0~20°、1~2。
3)以插播鸭嘴的角速度、开启相位角、开口速比为试验因素以直立度均值为指标,采用Box-Behnken试验设计原理进行了插播试验,并利用Design Expert8.0.6软件进行参数优化,得出了最优参数组合为插播鸭嘴角速度为200 mm/s,开启相位角为20°,开口速比为2;模型预测蒜种直立度为63.5°,田间试验验证直立度为63.2°,与优化结果基本一致。
在大蒜插播试验过程中发现相同工作条件下土壤类型影响蒜穴的形状、土壤回流量、回流速度,从而影响蒜种直立度,后续将进一步研究土壤类型对蒜种直立度的影响。
[1]栗晓宇,耿爱军,侯加林,等. 大蒜播种机研究现状及展望[J]. 农业机械,2017(2):105-107,109.
Li Xiaoyu, Geng Aijun, Hou Jialin, et al. Research status and Prospect of garlic seeder[J]. Agricultural machinery, 2017(2): 105-107, 109. (in Chinese with English abstract)
[2]崔荣江,黄嘉宝,张振河,等. 大蒜机械化播种技术研究现状[J]. 农业装备与车辆工程,2018,56(6):54-56.
Cui Rongjiang, Huang Jiabao, Zhang Zhanghe, et al. Research status of garlic mechanized sowing technology[J]. Transactions of the Agricultural Equipment and Vehicle Engineering, 2018, 56(6): 54-56. (in Chinese with English abstract)
[3]魏玉珍,邹栋林,刘勇兰,等. 大蒜芽端筛选及直立种植方案探究[J]. 农机化研究,2017,39(10):113-118.
Wei Yuzhen, Zou Donglin, Liu Yonglan, et al. Method inquisition of garlic bud screening and upright planting[J]. Journal of Agricultural Mechanization Research, 2017, 39(10): 113-118. (in Chinese with English abstract)
[4]Duck K, Won K, Tea G, et al. Garlic upright-position and planting device: US 6619219 B2[P]. 2003-11-16.
[5]Gao C, Zhang H. Study on the direction identification and alignment of garlic scaly bud[C]//Advanced Materials Research. Trans Tech Publications, 2012: 220-223.
[6]刘甲振,耿爱军,栗晓宇,等. 大蒜播种机单粒取种及补种技术研究现状[J]. 农机化研究,2019,41(2):262-268.
Liu Jiazhen, Geng Aijun, Li Xiaoyu, et al. Research status of garlic planting machine single seed-filling and resow[J]. Journal of Agricultural Mechanization Research, 2019, 41(2): 262-268. (in Chinese with English abstract)
[7]马伟童,宋井玲,孙倩,等. 连续种植式大蒜立直种植装置性能分析[J]. 农机化研究,2020,42(4):23-27,39.
Ma Weitong, Song Jingling, Sun Qian, et al. Performance analysis of continuous garlic upright planting device[J]. Journal of Agricultural Mechanization Research, 2020, 42(4): 23-27, 39. (in Chinese with English abstract)
[8]Zhang Zhaolei, Geng Aijun, Yang Jianning, et al. Design and test of the semi-automatic test-bed with inclined belt of garlic transplanting machine[J]. American Journal of Plant Sciences, 2015, 6(19): 3298-3305.
[9]Brajesh N, Shrivastava A K, Rajesh K N, et al. Design, Development and Evaluation of Self-Propelled Garlic (Allium Sativum L.) Clove Planter[D]. Jabalpur: College of Agricultural Engineering Jabalpur, 2010.
[10]Devesh K, Jitendra K, Kamal K. Studies and performance of a garlic planter in Uttar Pradesh[J]. International Journal of Agricultural Engineering, 2017, 10(1): 228-233.
[11]耿爱军,栗晓宇,侯加林,等. 自动定向大蒜播种机的设计与试验[J]. 农业工程学报,2018,34(11):17-25.
Geng Aijun, Li Xiaoyu, Hou Jialin, et al. Design and experiment of automatic directing garlic planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(11): 17-25. (in Chinese with English abstract)
[12]Zhang D Q, Wu Y J, Zhang C K. Vertical planting structure design for planter[C]// Applied Mechanics and Materials. Trans Tech Publications, 2014: 87-90.
[13]林悦香,尚书旗,杨然兵,等. 大蒜直立播种机设计[J]. 农机化研究,2013,35(10):87-89,94.
Lin Yuexiang, Shang Shuqi, Yang Ranbing, et al. The design of upright garlic planter[J]. Journal of Agricultural Mechanization Research, 2013, 35(10): 87-89, 94. (in Chinese with English abstract)
[14]韩秋燕,王小瑜,郝杰,等. 插穴式自动定向大蒜播种机的设计研究[J]. 农机化研究,2016,38(7):172-175.
Han Qiuyan, Wang Xiaoyu, Hao Jie, et al. Design research of plug-hole automatic orientation garlic planting machine[J]. Journal of Agricultural Mechanization Research, 2016, 38(7): 172-175. (in Chinese with English abstract)
[15]张丽芬. 大蒜种植机械蒜瓣方向识别与系统设计-基于PLC控制技术[J]. 农机化研究,2017,39(8):228-230.
Zhang Lifen. Planting garlic covers machine PLC control technology and system design-based on the direction identification[J]. Journal of Agricultural Mechanization Research, 2017, 39(8): 228-230. (in Chinese with English abstract)
[16]侯加林,黄圣海,牛子孺,等. 大蒜正头装置调头机理分析与试验[J]. 农业机械学报,2018,49(11):87-96.
Hou Jialin, Huang Shenghai, Niu Ziru, et al. Mechanism analysis and test of adjusting garlics upwards using two duckbill devices[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(11): 87-96. (in Chinese with English abstract)
[17]胡建平,潘杰,张晨迪,等. 行星轮栽植机构优化设计与试验[J]. 农业机械学报,2018,49(11):78-86.
Hu Jianping, Pan Jie, Zhang Chendi, et al. Optimization design and experiment on planetary gears planting mechanism of self-propelled transplanting machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(11): 78-86. (in Chinese with English abstract)
[18]张晓龙,伍德林,吴崇友,等. 鸭嘴式钵苗移栽机的设计和试验研究[J]. 农机化研究,2017,39(3):134-138,143.
Zhang Xiaolong, Wu Delin, Wu Chongyou, et al. Design and experimental study of duckbill type transplanting machine[J]. Journal of Agricultural Mechanization Research, 2017, 39(3): 134-138, 143. (in Chinese with English abstract)
[19]焦灏博,刘姣娣,曹卫彬. 鸭嘴开合控制机构张角误差分析[J]. 农机化研究,2018,40(10):18-23,268.
Jiao Haobo, Liu Jiaodi, Cao Weibin. Analysis and optimization of the duckbill opening angle error of the transplanting mechanism[J]. Journal of Agricultural Mechanization Research, 2018, 40(10): 18-23, 268. (in Chinese with English abstract)
[20]金诚谦,袁文胜,吴崇友,等. 大蒜播种时鳞芽朝向对大蒜生长发育影响的试验研究[J]. 农业工程学报,2008,24(4):155-158.
Jin Chengqian, Yuan Wensheng, Wu Chongyou, et al. Experimental study on effects of the bulbil direction on garlic growth[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(4): 155-158. (in Chinese with English abstract)
[21]崔荣江,张华,徐文艺,等. 大蒜种体入土后的直立栽种条件研究[J]. 农机化研究,2015,37(2):83-86.
Cui Rongjiang, Zhang Hua, Xu Wenyi, et al. Discussion on the present situation and development of garlic mechanized production in China[J]. Journal of Agricultural Mechanization Research, 2015, 37(2): 83-86. (in Chinese with English abstract)
[22]姬江涛,杨林辉,金鑫,等. 行星轮系滑道式钵苗栽植机构设计与参数优化[J]. 农业工程学报,2018,34(18):83-92.
Ji Jiangtao, Yang Linhui, Jin Xin, et al. Design and parameter optimization of planetary gear-train slip type pot seedling planting mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 83-92. (in Chinese with English abstract)
[23]陈建能,夏旭东,王英,等. 钵苗在鸭嘴式栽植机构中的运动微分方程及应用试验[J]. 农业工程学报,2015,31(3):31-39.
Chen Jianneng, Xia Xudong, Wang Ying, et al. Motion differential equations of seedling in duckbilled planting nozzle and its application experiment[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 31-39. (in Chinese with English abstract)
[24]Ahmad A, Alkharfy K M, Wani T A, et al. Application of Box–Behnken design for ultrasonic-assisted extraction of polysaccharides from Paeonia emodi[J]. International journal of biological macromolecules, 2015, 72: 990-997.
[25]Araujo F M, Santos M D, de Oliveira M A, et al. Box-Behnken design applied to optimize the ultrasound-assisted extraction of petroleum biomarkers in river sediment samples using green analytical chemistry[J]. Analytical Methods, 2017, 9(40): 5859-5867.
[26]宋占华,宋华鲁,耿爱军,等. 棉花秸秆双支撑切割性能试验[J]. 农业工程学报,2015,31(16):37-45.
Song Zhanhua, Song Hualu, Geng Aijun, et al. Experiment on cutting characteristics of cotton stalk with double supports[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(16): 37-45. (in Chinese with English abstract)
[27]严伟,胡志超,吴努,等. 铲筛式残膜回收机输膜机构参数优化与试验[J]. 农业工程学报,2017,33(1):17-24.
Yan Wei, Hu Zhichao, Wu Nu, et al. Parameter optimization and experiment for plastic film transport mechanism of shovel screen type plastic film residue collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 17-24. (in Chinese with English abstract)
[28]Kamarudin NB, Sharma S, Gupta A, et al. Statistical investigation of extraction parameters of keratin from chicken feather using Design-Expert[J]. 3 Biotech. 2017, 7(2): 127.
[29]Duangjit S, Chairat W, Opanasopit P, et al. Application of Design Expert for the investigation of capsaicin-loaded microemulsions for transdermal delivery[J]. Pharmaceutical development and technology. 2016, 21(6): 698-705.
[30]Peláez JI, Gomez-Ruiz JA, Fornari J, et al. Automatic identification of characteristic points related to pathologies in electrocardiograms to design expert systems[J]. Soft Computing. 2019, 23(12): 4207-4219.
Optimization and experiment of planting perpendicularity of planetary wheel garlic planter
Li Tianhua1,2, Huang Shenghai3, Niu Ziru1,2, Hou Jialin1,2※, Wu Yanqiang1,2, Li Yuhua1,2
(1.,,271018,; 2.,271018,; 3.,,100089,)
In the implantation process of garlic mechanized seeding, under the strong coupling among garlic seeds, soil and parts touching it, the verticality of adjusted garlic seeds is very easy to reduce again, thus affecting the final garlic output and garlic quality. How to ensure that garlic seeds are planted in an upward vertical direction has become a key technology to be solved. To solve this problem, this paper took the planetary wheel garlic planter designed in the early stage as the research object, introduced its structure and working principle in combination with the whole garlic planter, realized the adjustment of the opening and speed ratio of the inserting duckbill by processing the cams of different planters, and changed the opening phase angle of the inserting duckbill by adjusting the circumferential position of the cams installed in the machine. Based on the establishment of garlic inserting seed model and the analysis of the process, the tip motion equation of the duckbill was established and imported into CAXA software to generate the movement track. Through the analysis of the movement track under different parameters, it is clear that the key factors that affect the verticality of garlic seeds after planting are the linear speed of the inserting duckbill, the opening phase angle and the ratio of the opening angle of spigot duck's beak to the center angle corresponding to the cam convex section (the opening and speed ratio). In order to verify the correctness of the theoretical analysis, a garlic planting test-bed was developed, and the indoor experiment of Cangshan garlic planting was carried out. Through the single factor experiment, it was determined that the value range of the linear speed of the duckbill was 200-500 mm/s, the range of the opening phase angle was 0-20°, and the range of the opening and speed ratio was 1-2. In order to obtain the optimal parameters of these three factors, the Box-Benhnken central composite test method was used to design the linear velocity, opening phase angle and opening velocity ratio of the spilt duck's beak by three factors and three levels quadratic regression test. The sowing test was carried out, and the response surface mathematical model was established by using Design-expert software. The key parameters affecting the verticality were comprehensively optimized. The optimal working parameters are as follows, the linear speed is 200 mm/s, the opening phase angle is 20°, the opening and speed ratio is 2. In order to verify the performance of the inserter using the optimized parameters, field experiments were carried out. The results showed that the average vertical degree of garlic seeds in the optimal parameter operation was 63.2°, which was 21.8% higher than that before. It not only met the requirements of garlic planting vertical degree, but also further improved the integration of agricultural machinery and agronomy, which improved the guarantee for large-scale mechanized vertical sowing of garlic.
agricultural machinery; garlic seeder; planetary wheel; perpendicularity; keep posture planting
李天华,黄圣海,牛子孺,侯加林,吴彦强,李玉华. 行星轮式大蒜插播机播种直立度优化与试验[J]. 农业工程学报,2020,36(3):37-45.doi:10.11975/j.issn.1002-6819.2020.03.005 http://www.tcsae.org
Li Tianhua, Huang Shenghai, Niu Ziru, Hou Jialin, Wu Yanqiang, Li Yuhua. Optimization and experiment of planting perpendicularity of planetary wheel garlic planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(3): 37-45. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.03.005 http://www.tcsae.org
2019-06-05
2019-11-18
国家特色蔬菜产业技术体系(CARS-24-D-01)、山东省农机装备研发创新计划项目(2017YF001)、山东省农业重大应用技术创新项目(SD2019NJ004)、山东省现代农业产业技术体系蔬菜产业创新团队项目(SDAIT-05-11)
李天华,博士,副教授,主要从事智能农机装备的研究。Email:lth5460@163.com。
侯加林,博士,教授,主要从事智能农机装备的研究。Email:jlhou@sdau.edu.cn
10.11975/j.issn.1002-6819.2020.03.005
S223.2+3
A
1002-6819(2020)-05-0037-09
