仿人机械手设计与硬度感知研究
2020-04-08赵长盛苑文博郝丽娜
张 颖, 赵长盛, 苑文博, 郝丽娜
(东北大学 机械工程与自动化学院, 辽宁 沈阳 110819)
为提高机器人的拟人化程度,更好地帮助人类完成工作,开发具有适应性、实用性和智能性的仿人机械手系统已经成为目前仿人机器人领域的重要发展方向之一.
近年来,多种不同驱动方式的机械手不断涌现,可以分为驱动外置式和驱动内置式两类.驱动内置式机械手将驱动器、控制器和传感器系统置于灵巧手内部.1998年,第一个完全内置式多指灵巧手DLR-I[1]采用腱驱动形式,共有4个手指,12个自由度.该机械手独立于机械臂系统,属于局部自主系统.但内置式机械手整体尺寸较大,灵活性较低,维护难度大.驱动外置式机械手多将驱动系统置于机器人前臂,通过绳索或形状记忆合金等传递驱动力/力矩,驱动各手指完成抓取任务.如著名的Bridgwater等[2]和Kochan等[3],将驱动器及控制器集成于机器人的前臂中,实现手指关节的单独控制,完成抓取操作.驱动外置式机械手可以极大减小本体尺寸,灵活性较高.
在实际应用中,研究者更多地关注机械手稳定自适应抓取能力.人手可以通过复杂的触觉感知系统识别物体硬度,进而采取合适的抓取力[4-6].然而,大多数机械手只具备基本的压力传感.例如日本Gifu大学研发的Gifu hand III[7]指尖位置集成了800多个传感阵列点,可以很好地模拟人手触觉,完成对物体的接触识别;德国航天航空中心在DLR hand[8]指端集成了6维力传感器,从而完成接触力反馈.然而,它们结构复杂,集成困难,且难以区分物体软硬程度,无法实现对不同硬度物体的自适应抓取.
驱动器内部集成的电流采样模块可以获得机器人运动过程中的电流信息,通过对电流波动情况的分析,能够一定程度上解析机器人的运动情况,是实现无外部传感器检测的有效途径,降低了装配难度和加工成本.电流反馈已被应用于机器人的碰撞检测和拖动示教等方面.上海交通大学的王宁研究团队基于关节电流变化实现了轻型机械臂无外置传感器的碰撞检测功能[9].Indri 等提出一种基于电机电流的机器人故障检测与安全保护方法.该方法将机器人各关节电流转化为力矩值,通过比较该值与机器人动力学模型所计算的力矩值,进行碰撞检测[10].Capurso等提出了一种基于电流反馈的冗余机器人动觉示教方法,无需昂贵的力/扭矩传感器[11].此外,Kim等通过电流传感器感知路况,同时结合模糊PID控制算法,对移动机器人的滑脱现象进行估计与补偿控制[12].
综合上述机械手研究现状的分析,为满足仿人机械手向着简洁化、平民化、轻量化和自适应方向发展的需求,本文设计了一款基于欠驱动原理的多自由度仿人机械手.该机械手手指和手掌采用基于3D打印技术的模块化设计,控制单元模块集成在机械手外的控制箱内.针对现有仿人机械手难以识别物体硬度的问题,本文提出采用电机电流反馈方式识别被抓物体硬度,实现了仿人机械手对软硬不同物体的智能分拣操作.该机械手具有自由度多、集成度高、运动灵活、智能识别等优点.
1 仿人机械手结构设计
本文所设计的仿人机械手采用模块化设计,其中食指、中指、无名指和小指设计结构相同,每根手指具有3个转动关节,分别为近指节、中指节和远指节.拇指具有2个弯曲自由度和1个侧摆自由度,由2个电机分别驱动,更接近人手的功能.钢丝绳一端固定在指尖,另一端绕过指节内部的导向轮与微型丝杠电机上的滑块相连,实现手指关节的运动.本文采用微型丝杠电机直接驱动,取代电机配合减速器的驱动方式,在减少结构复杂性和装配难度的同时降低了手的质量.仿人机械手结构如图1所示.

图1 仿人机械手结构设计图
仿人机械手通过3D打印技术加工完成[13-14],整体结构紧凑、质量轻.手指各关节尺寸参照国标GB 10000—88中关于成年男子手相关尺寸的规定,具体尺寸和关节转角范围如表1所示.

表1 仿人机械手手指尺寸及弯曲角度
本文所设计的欠驱动仿人机械手具有断电自锁的位姿保持能力,可以实现对不同物体的稳定抓取和提拉操作,主要操作性能参数如表2所示.表2对比分析了与本文机械手结构和驱动方式最为近似的DLR/HIT II灵巧手[15]性能参数,可以发现,本文所设计的仿人机械手质量更轻,指尖输出力更大.

表2 仿人机械手性能参数
2 仿人机械手运动空间分析
通过对手指进行运动学分析,计算仿人机械手运动空间.
2.1 手指正运动学
单根手指的运动可以看作是由3个连杆串联组成的开环运动链,采用D-H方法建立手指运动的连杆坐标系,如图2a所示.其中手指基坐标系x0y0z0建立在近指节根部,其余坐标系随关节联动.
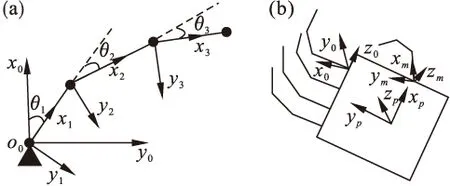
图2 手指及手掌坐标系示意图(右手)
根据单根手指的D-H关节参数定义:L1,L2和L3分别代表近指节长度、中指节长度和远指节长度;θi(i=1,2,3)表示连杆的转角,相邻两杆沿公共轴线方向的距离为0,两关节轴线之间的夹角为0.由此可得传递矩阵:
.(1)
其中:c1=cosθ1;c12=cos(θ1+θ2);c123=cos(θ1+θ2+θ3);s1=sinθ1,s12=sin(θ1+θ2),s123=sin(θ1+θ2+θ3),且0°≤θ1≤90°,0°≤θ2≤80°,0°≤θ3≤40°.
各手指基坐标系在手掌坐标系中的位置分别为:拇指[36,0,0]T,食指[27,50,0]T,中指[9,50,0]T,无名指[-9,50,0]T,小拇指[-30,50,0]T.如图2b所示,四指指尖相对于手掌坐标系的位置分别为
(2)
其中:下标w=[食指,中指,无名指,拇指];xw和yw分别表示四指的基坐标系在手掌坐标系中的x坐标和y坐标.同理可得拇指指尖相对于手掌坐标系的位置:
(3)
2.2 手指可达范围
根据上述建立的运动学关系以及仿人机械手结构尺寸,通过MATLAB仿真,可以得到四指的运动空间如图3所示,由于除拇指以外的四指仅具有弯曲功能,所以,它们的最大运动空间为平面空间.
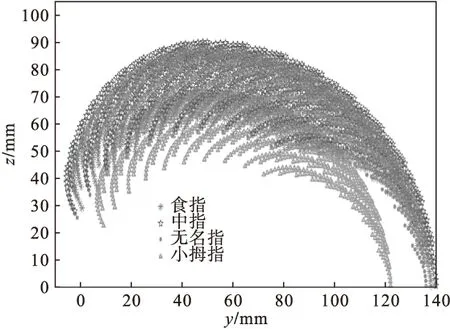
图3 四指运动空间
拇指指尖的最大三维运动空间如图4所示.
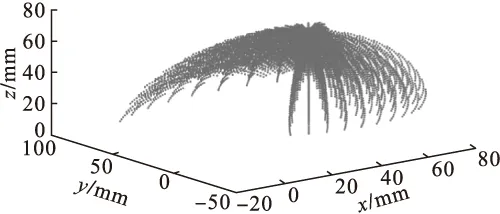
图4 拇指运动空间
3 反馈电流解析
本节搭建了仿人机械手控制系统,介绍了仿人机械手指端触觉信息的获取与解析方法,提出了基于电流传感器反馈的未知物体硬度识别策略.
3.1 仿人机械手控制系统结构
为实现仿人机械手的灵巧抓取与智能化硬度识别功能,其控制系统硬件与控制系统原理图如图5所示.控制系统硬件分为执行层、感知层、控制层和驱动层.执行层包括仿人机械手手指;感知层包含6个电流传感器(ACS712);控制层由Arduino Mega 2560控制器和上位机组成;驱动层包含电源、L298N驱动模块、微型丝杠电机和钢丝绳.由图5b可知,Arduino控制器根据上位机指令输出PWM信号,通过L298N驱动模块控制手指电机.当电机正极PWM占空比为正,负极PWM为0时,手指弯曲;电机负极PWM占空比为正,正极PWM为0时,手指伸直复位;电机正极和负极PWM均为0时,手指姿势自锁.手指运动过程中的电流信息通过和电机串联的电流传感器检测,并将电流变化反馈给Arduino,从而传输到上位机.
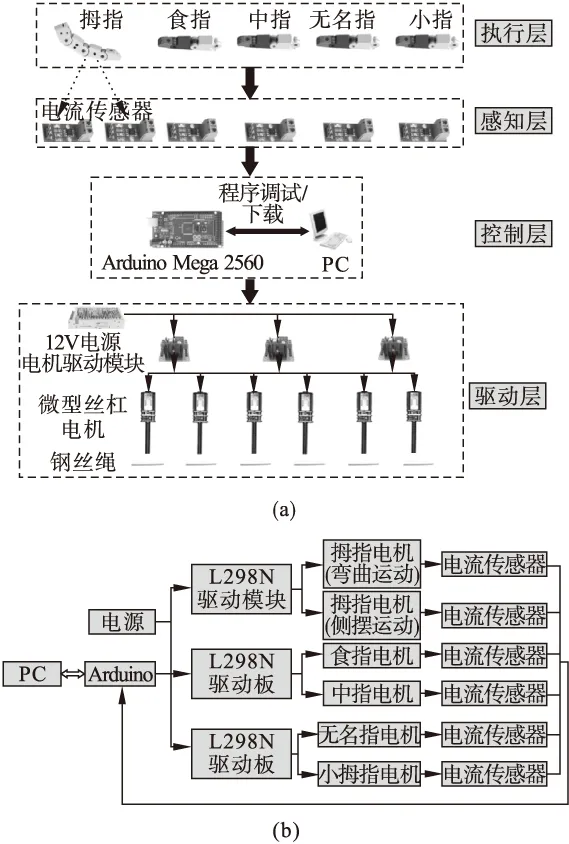
图5 仿人机械手控制系统硬件
3.2 反馈电流与物体硬度关系
为探究仿人机械手运动过程中,电流传感器的输出特性,基于上述仿人机械手控制系统,选取硬度不同的物品进行抓取实验,图6仅表示了对其中几种实验物品的抓取.
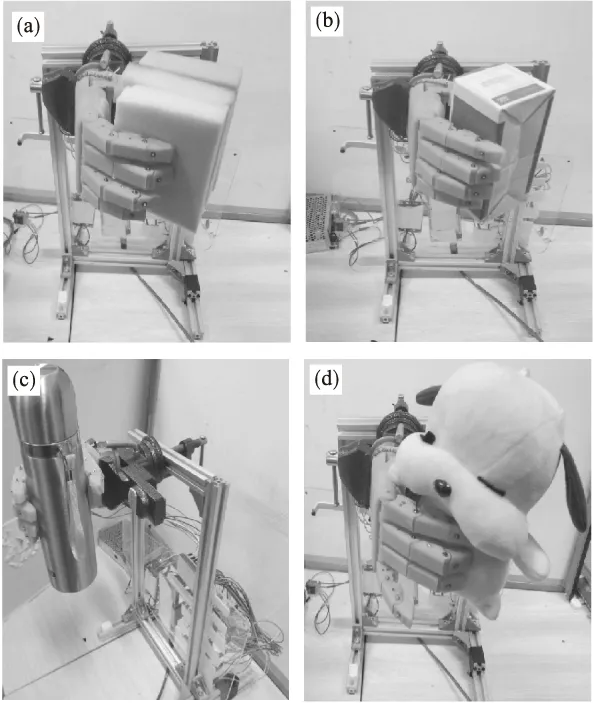
图6 仿人机械手抓握实验
经过多次实验发现,不同手指在抓取相同硬度物体时,电流变化趋势相同.因此,本文只针对中指反馈电流进行研究,且以Arduino模拟口返回上位机的数据(0~1 023)表征电机实际电流.根据电机的额定驱动电压和实现手指平稳运行原则,设定电机正向驱动PWM占空比为60,电流传感器反馈的最大值介于565~570之间.图7为仿人机械手分别抓取海绵、纸盒、保温杯、新鲜苹果、新鲜橘子、毛绒玩具过程中的中指电流变化曲线.仿人机械手抓取不同物体时,电流呈现相似的变化趋势:以图7a为例,电机开始上电时刻,电流突增,在手指空载弯曲过程中,电流稳定在一定范围内,波动较小;当电流再次出现明显增加时,表明手指开始与物体接触;随后电流不断增加,直到手指因阻力作用无法继续弯曲,电流达到最大;断电后,电流下降.
由图7可知,仿人机械手在抓取硬度不同的物体时,电流从初始接触物体到因被抓取物体阻碍作用完全无法运动过程中,电流变化斜率不同,以下简称为接触电流斜率.因此,接触电流斜率变化可以作为物体软硬程度的识别依据,替代指尖传感器,降低仿人机械手的生产成本和装配难度.

图7 中指电流变化图
对图7所示的实验数据进行如下处理,计算接触电流斜率,解析仿人机械手指端的触觉信息:实验过程中设置的采样频率为100 Hz,由于初始上电时刻,电流不平稳,取上电后的第100个采样时刻的电流数据,记为(X1,Y1);在中指未接触物体之前,电流变化平稳,有较小波动,取与X1时刻相隔200个采样时刻的数据,记为(X200,Y200);取该时间段内对应的电流最大值,记为(Xm,Ym);取X200采样时刻之后第一次电流值大于Ym的点,记为(Xmax,Ymax),该点对应手指开始接触被抓物体的时刻;取所有采样电流值中前5个最大值的平均值,记为Yave;取(Xmax,Ymax)点之后电流第一次大于Yave的数据点,记为(Xn,Yn),则该点对应时刻被定义为手指完全无法弯曲时刻.定义接触电流斜率为
(4)
表3给出了仿人机械手抓取上述不同硬度物体时,中指接触电流斜率变化情况.根据实验数据可以发现,仿人机械手接触较硬物体时,如苹果、保温杯、纸盒等,接触电流斜率较大;仿人机械手接触较软物体时,如毛绒玩具、海绵等,接触电流斜率较小.接触电流斜率越大,表示被抓物体的硬度越大,反之越小.
4 仿人机械手自主识别硬度研究
基于3.2节所得的接触电流斜率与被抓物体硬度的关系,研究仿人机械手抓取操作过程中的自主硬度识别功能.
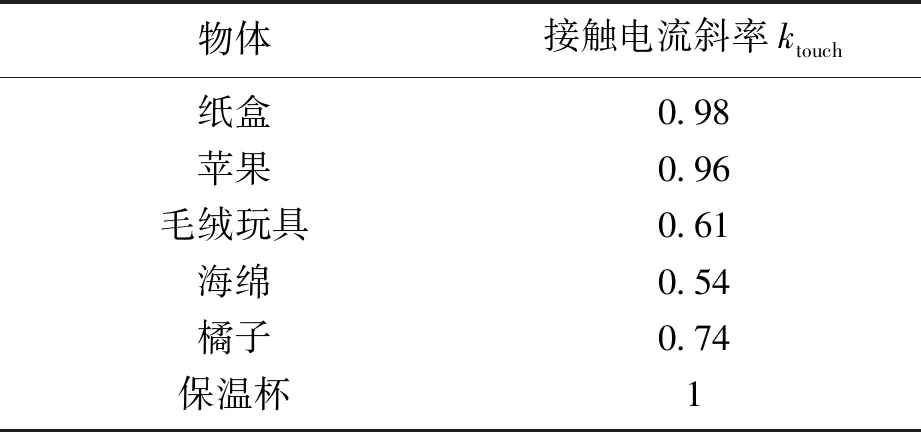
表3 抓取不同硬度物体中指接触电流斜率
4.1 物体硬度自主识别功能
基于接触电流斜率与物体硬度的关系,设计了如图8所示的仿人机械手对被抓物体硬度的自主识别控制流程.
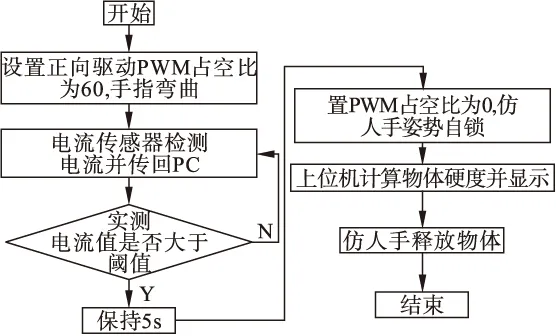
图8 物体硬度识别控制流程图
首先,控制电机正极PWM占空比值为60,负极PWM占空比值为0,手指弯曲,并将电流传感器数据实时返回上位机存储.由图7采集的实验数据可知,手指在完全无法弯曲的过程中,电流值最大在565到570之间,因此设定阈值为565,当检测到的电流值大于565时,表明手指接近无法继续弯曲状态,保持5s后,电机正负极的PWM值设为0,仿人机械手保持抓握状态.上位机根据采集的中指电流传感器数据计算接触电流斜率,并显示结果.待硬度结果显示后,控制电机正极PWM占空比为0,负极PWM占空比为60,仿人机械手释放被抓物体,手指复位.
基于仿人机械手自主硬度识别功能,进行若干组抓取实验,验证该识别策略的准确性.实验中,对相同物体重复抓取5次,计算每次的接触电流斜率,并计算结果方差.表4为仿人机械手硬度感知结果.可以发现,仿人机械手智能识别的手机和木块的接触电流斜率与纸盒、保温杯等的接触电流斜率相仿;而毛线球、气球和橡皮泥的接触电流斜率则明显较小,识别结果有效.通过方差分析,相同物体的接触电流斜率变化较小,证明该硬度识别策略具有可靠性.为集成简便,未采用弯曲传感器,所以无法高精度捕捉手指与物体的接触时刻信息,故只能感知硬度差别大的物体,无法进行更加精细的等级划分,将在后续研究中改进.
4.2 仿人机械手分拣实验
为实现仿人机械手的实际应用价值,基于实验室设计的气动肌肉变刚度软体手臂平台[16],将仿人机械手安装在软体手臂末端,作为执行器,完成软烂的橘子和新鲜橘子的分拣实验.
根据表3和表4所列结果,将橘子的硬度分为软和硬两个等级.当中指接触电流斜率k≤0.6时,表明被抓取橘子已软烂;当k>0.6时,表明被抓取橘子新鲜.用H表征橘子硬度,分别用H1和H2表示两个等级.定义橘子硬度与接触电流斜率对应关系如式(5)所示:
(5)
基于式(5),仿人机械手能够识别橘子硬度,实现对软烂和新鲜橘子的智能分类.
仿人机械手自动分拣系统主要包括仿人机械手、变刚度软体手臂、操作台、仿人机械手抓取控制硬件系统,利用该系统实现对新鲜和软烂橘子的分拣操作任务.图9为仿人机械手完成橘子分拣任务过程实验图.
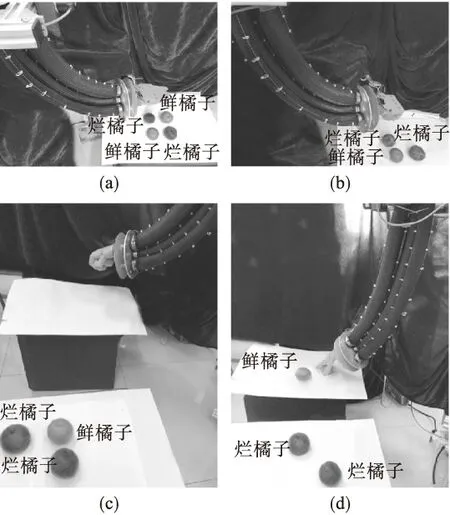
图9 仿人机械手完成水果分拣任务实验过程

表4 物体硬度识别结果
智能分拣功能的实现主要依靠仿人机械手对物体硬度的识别能力,其具体实现过程为:将若干新鲜和软烂橘子放置在平台上,将软体手臂设置在初始位置,随后启动仿人机械手抓取动作,同时完成仿人机械手对所抓橘子硬度的判断,从而区分新鲜橘子和软烂橘子.若识别为新鲜橘子,触发手臂向新鲜橘子安放平台运动,待到达指定位置后,仿人机械手释放物体,最后手臂运动到初始位置,再进行对下一个目标橘子的分拣工作.若识别为软烂橘子,仿人机械手原地释放物体.
5 结 语
本文采用微型丝杠电机为驱动元件,基于3D打印技术制作了仿人机械手样机.该机械手具有多自由度、外观仿人、结构简单等特点,为仿人机械手向实用化、简洁化、轻便化方向发展提供了设计思路和方法.搭建了仿人机械手控制系统,研究了电流反馈信息与物体硬度的关系,提出了仿人机械手对物体硬度的智能识别策略.最终实现了仿人机械手作为软体手臂末端执行器分拣水果实际应用.目前该仿人机械手仅能区分硬度差异大的物体,将继续改进电流反馈信息解析方法,并依此设计自适应抓取控制算法.
