基于改进模糊PID的轮式机器人速度控制器设计
2020-03-27王鑫刘怡明王明明孙晓云陈勇
王鑫 刘怡明 王明明 孙晓云 陈勇
摘 要:针对轮式机器人在行走过程中存在速度平衡超调较大与调节时间较长、速度平衡效果较差的问题,采用Matlab/Simulink與Carsim仿真软件建立轮式机器人四轮差速运动模型,对于无刷直流电机(BLDCM)系统,在原有模糊PID的基础上,结合抗积分饱和算法与变速积分算法,提出一种改进模糊PID控制的调速方法。仿真结果表明,通过抗积分饱和与变速积分算法改进后的模糊PID控制器与传统模糊PID控制器相比,在机器人速度平衡控制过程中,超调降低30%,调节时间降低33%,具有速度响应时间短、速度响应曲线波动小的优点。搭建了轮式机器人实验验证平台,实验结果表明,改进后的模糊PID控制调速方法的速度响应快,满足轮式机器人速度控制需求。所提设计可为轮式机器人速度稳定系统调试提供理论指导,并可应用于以速度调控为主导的控制系统。
关键词:机器人控制;轮式机器人;抗积分饱和;变速积分;模糊PID
中图分类号:TP273+.4 文献标识码:A doi:10.7535/hbkd.2020yx01006
Abstract:Aiming at the problems that the speed balance overshoot is large, the adjustment time is long, and the speed balance effect is poor during the walking process of a wheeled robot, a four-wheel differential motion model of a wheeled robot is established with Matlab/Simulink and Carsim simulation software, and for the brushless direct current motor system(BLDCM) system, based on the original fuzzy PID, combining with the anti-integration saturation algorithm and the variable speed integral algorithm, an speed regulation method based on improved fuzzy PID is proposed. The simulation results show that compared with the traditional fuzzy PID controller, the fuzzy PID controller improved by the anti-integral saturation and variable speed integration algorithm reduces the overshoot by 30% and the adjustment time by 33%. The response time is short and the speed response curve has small fluctuations. The wheeled robot experimental verification platform is built. The experimental results show that the speed regulation method based on improved fuzzy PID has fast speed response and meets the requirements of wheeled robot speed control. The proposed design may provide some theoretical reference for speed stable system debugging of wheeled detection robot, and can be used in control systems with speed control as main purpose.
Keywords:robot control; wheeled robot; anti-integral saturation; variable speed integral; fuzzy PID
轮式机器人在管道检测、市政检测等检测领域得到了广泛应用[1-4]。无刷直流电机(BLDCM)具有转矩大、效率高等优点,广泛应用于轮式机器人驱动系统[5-7]。文献[8]将PID控制算法应用于调速系统,PID控制算法结构简单,参数易调节,但对于被控过程往往具有很大的时变性和不确定因素很难达到满意的控制效果。文献[9—11]利用增量PID进行控制,在速度控制过程中,往往会引起积分项的累加,造成系统超调较大,增加调节时间,降低系统平稳性。文献[12—14]将粒子群与PID结合来改善PID控制的动态效果,降低速度响应。文献[15—16]将抗积分饱和与PID控制器结合降低系统的超调。文献[17—18]利用变速积分与PID结合改善系统调节时间,但它们依赖于精确的数学模型。文献[19—20]提出模糊自适应PID控制器。模糊控制从属于智能控制的领域,不需要精确的数学模型。
本文在深入研究轮式机器人速度控制的基础上,结合抗积分饱和与变速积分算法对模糊PID控制器进行改进,提出了一种改进模糊PID控制的新方法,将其用于轮式机器人的速度平衡控制,为验证所提控制方法的有效性,在启动加速过程及速度突变的情况下进行了仿真实验与实测实验。
1 轮式机器人模型建立
1.1 差速模型建立
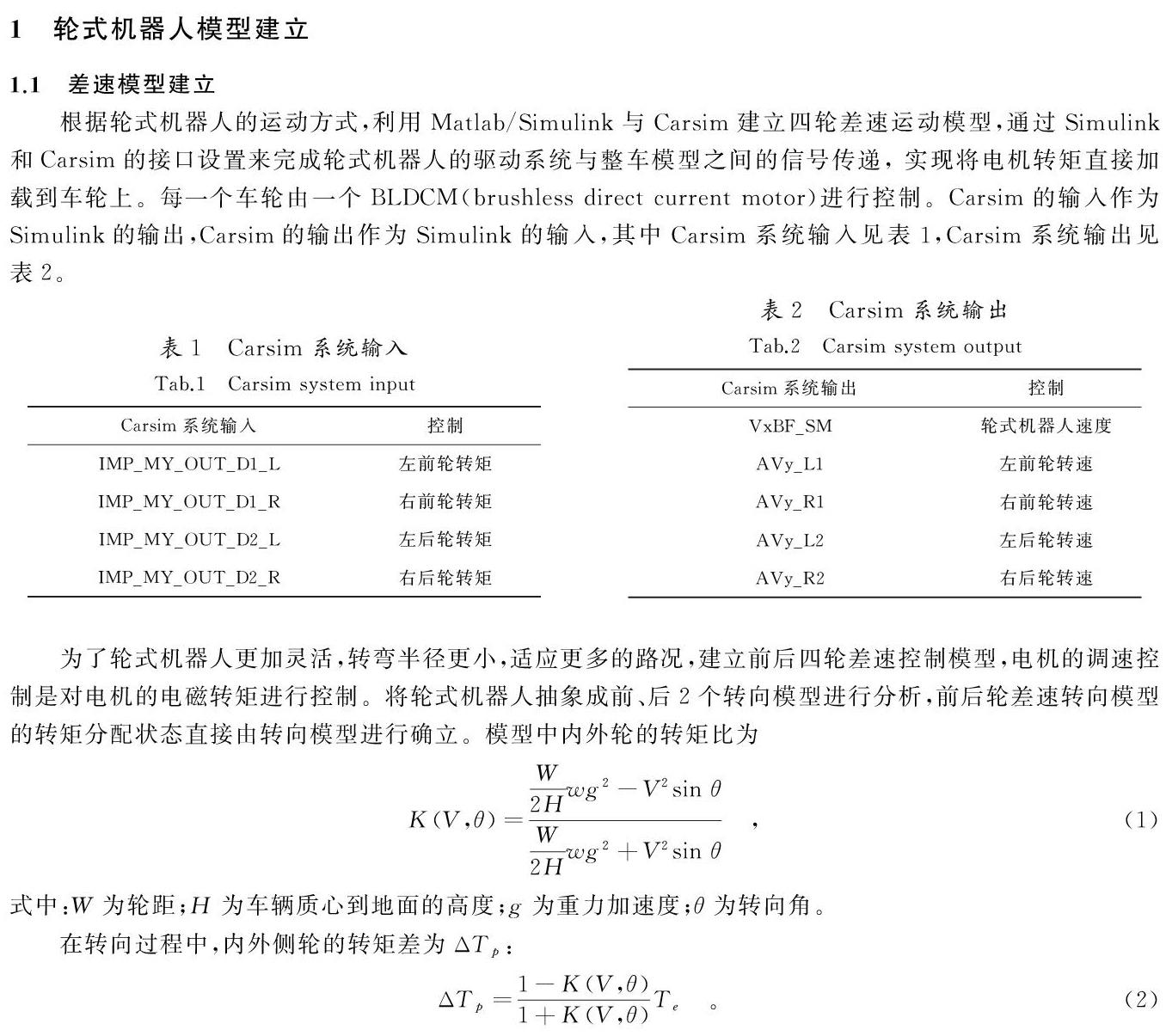
根据轮式机器人的运动方式,利用Matlab/Simulink与Carsim建立四轮差速运動模型,通过Simulink和Carsim的接口设置来完成轮式机器人的驱动系统与整车模型之间的信号传递, 实现将电机转矩直接加载到车轮上。每一个车轮由一个BLDCM(brushless direct current motor)进行控制。Carsim的输入作为Simulink的输出,Carsim的输出作为Simulink的输入,其中Carsim系统输入见表1,Carsim系统输出见表2。
为了轮式机器人更加灵活,转弯半径更小,适应更多的路况,建立前后四轮差速控制模型,电机的调速控制是对电机的电磁转矩进行控制。将轮式机器人抽象成前、后2个转向模型进行分析,前后轮差速转向模型的转矩分配状态直接由转向模型进行确立。模型中内外轮的转矩比为K(V,θ)=W2Hwg2-V2sin θW2Hwg2+V2sin θ ,(1)式中:W为轮距;H为车辆质心到地面的高度;g为重力加速度;θ为转向角。
针对BLDCM为两相导通星形三相六状态的情形,对其数学模型和电磁转矩特性进行分析。假设:
1)电机定子空间上均匀排布,完全对称;
2)电枢绕组连续且均匀分布在定子内表面;
3)转子永磁体产生的气隙磁场近似为方波;
4)磁路不饱和,且不考虑相关损耗;
5)换相、齿槽及电枢反应等影响均不予考虑。
2 改进模糊PID控制器设计
2.1 BLDCM双闭环调速系统
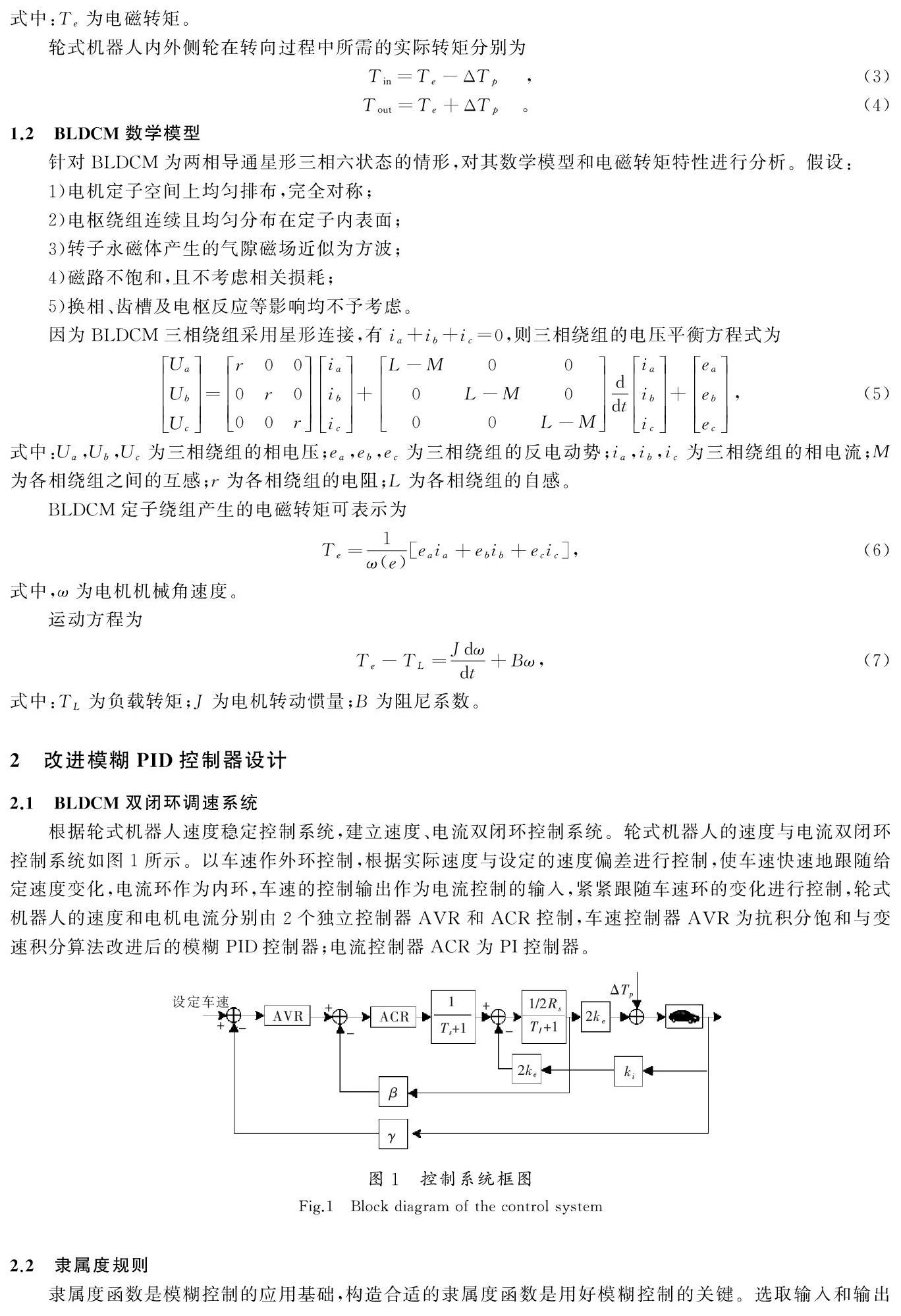
根据轮式机器人速度稳定控制系统,建立速度、电流双闭环控制系统。轮式机器人的速度与电流双闭环控制系统如图1所示。以车速作外环控制,根据实际速度与设定的速度偏差进行控制,使车速快速地跟随给定速度变化,电流环作为内环,车速的控制输出作为电流控制的输入,紧紧跟随车速环的变化进行控制,轮式机器人的速度和电机电流分别由2个独立控制器AVR和ACR控制,车速控制器AVR为抗积分饱和与变速积分算法改进后的模糊PID控制器;电流控制器ACR为PI控制器。
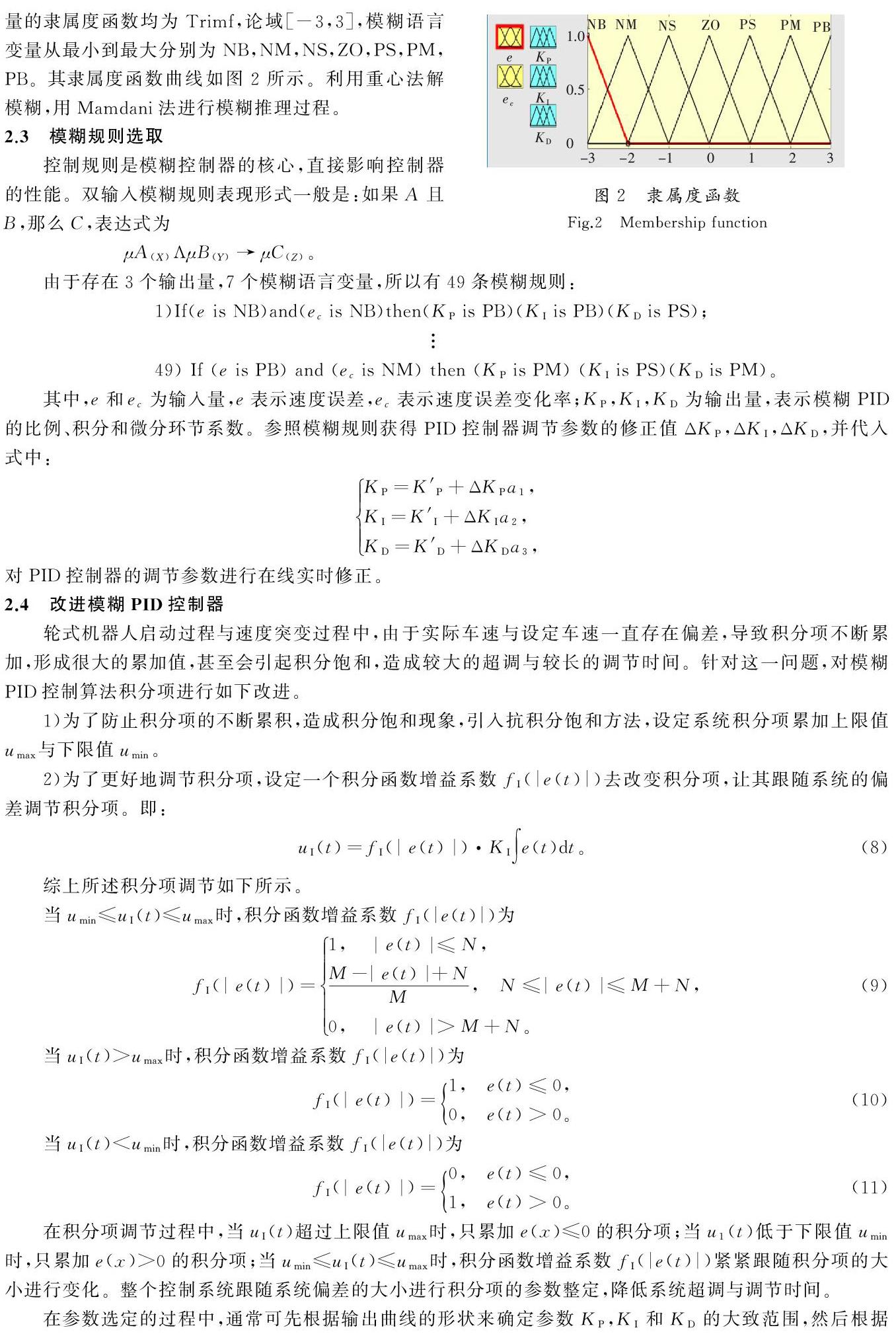
2.2 隶属度规则
在参数选定的过程中,通常可先根据输出曲线的形状来确定参数KP,KI和KD的大致范围,然后根据系统的输出得到参数的具体值。采用Ziegler-Nichols整定经验公式确定参数KP,KI和KD的值分别为100,50和2,常数M和N分别为1和0.36。
3 系统仿真与实物验证
3.1 实物与仿真平台
为了验证本文所提方法,结合实际轮式机器人,搭建仿真模型,轮式机器人如图3所示。
根据轮式机器人实际尺寸参数通过Matlab/Simulink与Carsim搭建联合仿真,仿真模型如图4所示。
其中:轮式机器人车长为820 mm;车宽为695 mm;车高为356 mm;车身质量为65 kg;车轮半径为150 mm;轮距为602 mm;轴距为504 mm。设定电机额定功率为5 kW;电阻(Rs)为0.125 Ω;电感(T1)为3.75 mH;反电动势(ke)为0.25 V·(r·min)-1;电流反馈系数(ki)为36;PWM延迟系数(Ts)为0.4。
3.2 仿真效果分析
仿真实验中设定地面摩擦系数为0.85,仿真过程中忽略风力阻力。
分析控制系统的稳定性,在轮式机器人启动过程中,其在直线行驶时启动加速过程对比如图5所示。
根据对比图可以看出,在电机启动加速过程中,改进的模糊PID达到设定速度的时间为1 s,较普通模糊PID降低33%。改进模糊PID的超调为6.3%,较普通模糊PID降低31%。
直线行驶5 s的时候设定速度由2.88 km/h变到3.5 km/h,其速度突然变大,如图6所示。
由图6可以看出,当速度突然变大时,改进的模糊PID控制器较普通模糊PID有较低的上升时间,相差0.2 s。改进的模糊PID控制器在2 s后跟随到变化速度,较普通模糊PID降低33%。改进的模糊PID超调为1.4%,较普通模糊PID降低30%。
直线行驶5 s的时候设定速度由2.88 km/h变到2.5 km/h,其速度突然变小,如图7所示。
由图7可以看出,当速度突然变小时,改进的模糊PID控制器较普通模糊PID有较低的下降时间,相差0.4 s。改进的模糊PID控制器在2 s后跟随到变化速度,较普通模糊PID降低33%。改进的模糊PID超调为1.3%,较普通模糊PID降低31.5%。
设定转弯角度为45°的情况下进行仿真实验,其启动加速过程如图8所示。
根据对比图可以看出,在电机启动加速过程中,改进的模糊PID达到设定速度用时为1 s,较普通模糊PID降低33%。改进模糊PID的超调为6.5%,较普通模糊PID降低30%。
转弯角度为45°的情况下,在5 s的时候设定速度由2.88 km/h变到3.5 km/h,其速度突然变大如图9所示。
由图9可以看出。当速度突然变大时,改进的模糊PID控制器较普通模糊PID有较低的上升时间,相差0.2 s。改进的模糊PID控制器在2 s后跟随到变化速度,较普通模糊PID降低33%。改进的模糊PID超调为1.4%,较普通模糊PID降低30%。
转弯角度为45°的情况下,在5 s的时候设定速度由2.88 km/h变到2.5 km/h,其速度突然变小,如图10所示。
由图10可以看出,当速度突然变小时,改进的模糊PID控制器较普通模糊PID有较低的下降时间,相差0.37 s。改进的模糊PID控制器在2 s后跟随到变化速度,较普通模糊PID降低33%。改进的模糊PID超调为1.2%,较普通模糊PID降低31%。
综上所述,轮式机器人在速度调节过程中,在直线行驶与转弯行驶过程中都取得很好的控制效果,速度响应快,速度曲线波动小,满足轮式机器人的速度控制效果。
3.3 实物验证
以轮式机器人为实验平台,利用所提算法对轮式机器人启动变速过程进行控制,轮式机器人主控制器见图11。
主控制器为KYDBL6050-2E,控制轮式机器人两侧电机。由于轮式机器人在转弯过程中左侧轮速相同,右侧轮速相同,所以两侧车轮分别使用2个直流电机进行控制。设置采样周期为50 ms,以实验室地面为实验环境,实验环境如图12所示。
为了验证轮式机器人速度变化与速度稳定性,选取轮式机器人重心速度作为参考,进行轮式机器人启动、加速、转弯与减速操作。启动过程速度增加到0.1 m/s,之后进行轮式机器人加速操作使轮式机器人加速到0.2 m/s,并在运行过程中进行轮式机器人转弯控制,在行走一段时间后进行减速操作,其实验结果如图13所示。
由实验结果分析可知,抗积分饱和与变速积分算法改进后的模糊PID控制器对速度响应快,速度响应曲线波动小,能够快速达到设定速度,并以设定速度平稳运行,满足轮式机器人速度变化与稳定需求。
4 结 论
针对轮式机器人启动过程与速度变化过程中,存在超调较大与调节时间较长的问题,本文在模糊PID控制的基础上,结合抗积分饱和与变速积分算法,提出一种改进的模糊PID控制方法,并与普通模糊PID进行对比实验,仿真实验表明,该控制方法系统超调小,调节时间短,速度响应曲线波动小。实测实验表明,改进的模糊PID速度控制响应迅速,满足轮式机器人速度控制需求,可为轮式机器人速度稳定系统调试提供理论指导,在可应用于以速度调控为主导的控制系统。本文所设计的控制器现仅应用于轮式机器人,未来将探索在更多类型的机器人驱动控制系统中加以应用。
参考文献/References:
[1] 顏文旭,宁金,孙强,等. 一种新型欠驱动型并联机器人的运动学分析与仿真[J].河北科技大学学报,2017,38(2):190-195.
YAN Wenxu,NING Jin,SUN Qiang,et al. Kinematics analysis and simulation of a new underactuated parallel robot[J].Journal of Hebei University of Science and Technology,2017,38(2):190-195.
[2] 周用安,万智,陈晓辉. 桥梁检测机器人系统及应用[J].公路工程,2017,42(3):145-150.
ZHOU Yong′an, WAN Zhi, CHEN Xiaohui. Automatic crack detection robot system for bottom surface of concrete bridges[J]. Highway Engineering,2017,42(3):145-150.
[3] 李逃昌. 农业轮式移动机器人自适应滑模路径跟踪控制[J].中国机械工程,2018,29(5):579-584.
LI Taochang. Adaptive sliding mode path tracking control of agricultural wheeled mobile robots[J]. China Mechanical Engineering, 2018, 29(5):579-584.
[4] 李格伦,崔天时,刘春莉,等. 农用轮式机器人运动控制系统设计与试验[J].农机化研究,2018,40(2):192-196.
LI Gelun,CUI Tianshi,LIU Chunli, et al. Design and experiment of motion and control system on the wheeled robot[J].Journal of Agricultural Mechanization Research,2018,40(2):192-196.
[5] 杨前明,王晓媛,王伟,等. 复合轮式机器人运动控制数学建模与实验研究[J]. 组合机床与自动化加工技术,2016(11):96-99.
YANG Qianming,WANG Xiaoyuan,WANG Wei,et al. Mathematical model of motion control and experimental study on composite wheeled robot[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2016(11):96-99.
[6] 谭谊诚,薛龙,黄继强,等. 轮式水下焊接机器人及其运动学分析[J]. 上海交通大学学报,2016,50(12):1857-1860.
TAN Yicheng,XUE Long,HUANG Jiqiang,et al. Wheeled underwater welding robot and kinematics analysis[J]. Journal of Shanghai Jiaotong University,2016,50(12):1857-1860.
[7] 郑建生,杨卫,徐胜. 轮式机器人定点运动的姿态调整[J]. 电子器件,2017,40(1):158-161.
ZHENG Jiansheng,YANG Wei,XU Sheng. Attitude adjustment of wheeled robot's fixed-point motion[J]. Chinese Journal of Electron Devices,2017,40(1):158-161.
[8] 雷慧杰. 基于STM32的直流电机PID调速系统设计[J]. 现代电子技术,2016,39(8):165-167.
LEI Huijie. Design of STM32-based PID speed control system for DC motors[J]. Modern Electronics Technique,2016,39(8):165-167.
[9] 宋军,严东. 基于FPGA的双模式伺服控制算法的研究[J]. 火力与指挥控制,2015,40(1):137-141.
SONG Jun,YAN Dong. Dual-mode servo control algorithm based on FPGA[J]. Fire Control & Command Control,2015,40(1):137-141.
[10] 吴付祥. 基于流量闭环控制的粉尘采样器设计[J]. 工矿自动化,2015,41(7):21-24.
WU Fuxiang. Design of dust sampler based on closed-loop flow control[J]. Industry and Mine Automation,2015,41(7):21-24.
[11] 杨海燕,胡万里,李金洋,等.增量PID控制算法在沼气工程中的应用[J]. 农机化研究,2016,38(2):252-254.
YANG Haiyan,HU Wanli,LI Jinyang,et al. The application of incremental PID control algorithm in biogas engineering[J]. Journal of Agricultural Mechanization Research,2016,38(2):252-254.
[12] 王唯一,张明泉,杨帆,等. 基于粒子群算法的PID调速系统的研究[J]. 控制工程,2015,22(6):1082-1086.
WANG Weiyi,ZHANG Mingquan,YANG Fan,et al. Study of PID speed controller based on particle swarm optimization[J]. Control Engineering of China,2015,22(6):1082-1086.
[13] 楊智闻,王宏华,宋苏影. 基于粒子群算法的开关磁阻调速电动机PID控制器参数优化[J]. 机械制造与自动化,2016,45(1):173-176.
YANG Zhiwen,WANG Honghua,SONG Suying. Research on optimization of PID parameters of SRD based on PSO algorithm[J]. Machine Building & Automation,2016,45(1):173-176.
[14] 王磊. 基于抗积分饱和PID算法的地暖控制方法研究[J]. 电子设计工程,2017,25(4):181-184.
WANG Lei. Research of controlling radiant floor heating based on PID algorithm of anti-integral saturation[J]. Electronic Design Engineering,2017,25(4):181-184.
[15] 周华伟,温旭辉,赵峰,等. 一种具有预测功能的抗积分饱和PI速度控制器[J]. 电机与控制学报,2012,16(3):15-21.
ZHOU Huawei,WEN Xuhui,ZHAO Feng,et al. Predicative anti-windup strategy for PI-type speed controller[J]. Electric Machines and Control,2012,16(3):15-21.
[16] 杨明亮,刘军,兖涛,等. 永磁同步电机变速积分PID调速控制[J]. 信息技术,2015(4):19-22.
YANG Mingliang, LIU Jun,YAN Tao,et al. The variable-integrator PID speed control of permanent magnet synchronous motor[J]. Information Technology,2015(4):19-22.
[17] 徐坤,周子昂,吴定允,等. 基于变速积分的无刷直流电机PID控制系统[J]. 绵阳师范学院学报,2014,33(8):49-52.
XU Kun,ZHOU Ziang,WU Dingyun,et al. A control system of brushless DC motor based on variable- integrator PID[J]. Journal of Mianyang Normal University,2014,33(8):49-52.
[18] 杨钟鼎,周洁敏,李杨,等.变速积分PID法控制的电静液作动器的设计与仿真[J]. 江苏科技大学学报(自然科学版),2017,31(3):321-326.
YANG Zhongding,ZHOU Jiemin,LI Yang,et al. Design and simulation variable speed integral PID control method of electro hydrostatic actuator[J]. Journal of Jiangsu University of Science and Technology(Natural Science Edition),2017,31(3):321-326.
[19] 罗小丽,范桂林. 无刷直流电机模糊PI自适应控制系统仿真研究[J]. 微电机,2018,51(12):67-71.
LUO Xiaoli,FAN Guilin. Simulation study of BLDCM fuzzy-PI adaptive control system[J]. Micromotors,2018,51(12):67-71.
[20] 夏国清,陈华珍. 模糊理论和PID相融合的两轮自平衡机器人智能控制系统[J].现代电子技术,2018,41(21):117-120.
XIA Guoqing,CHEN Huazhen. Two-wheeled self-balancing robot′s intelligent control system combining fuzzy theory and PID[J].Modern Electronics Technique,2018,41(21):117-120.
