变胞汽车焊接机器人技术综述研究
2020-03-25胥刚


摘要:焊接工业机器人在整车制造企业广泛应用,实现了汽车车身制造的量产化与自动化。变胞机构是基于机构运动过程中构件数目的变化和自由度的变化为特征的机构,变胞机构应用于焊接机器人中,可以提高焊接效率及降低生产成本。
Abstract: Welding industrial robots are widely used in vehicle manufacturing enterprises, and have realized mass production and automation of automobile body manufacturing. Metamorphic mechanism is a mechanism based on the change of the number of components and changes in the degree of freedom during the movement of the mechanism. The metamorphic mechanism is used in welding robots to improve welding efficiency and reduce production costs.
关键词:变胞机构;焊接机器人;综述
Key words: metamorphic mechanism;welding robot;review
中图分类号:TP242 文献标识码:A 文章编号:1006-4311(2020)04-0200-02
1 研究背景
传统的串联机器人刚度较低,应用于高速,大承载的场合较少。变胞机构能够实现变机构与变自由度两种方式,因此研究变胞焊接机器人,可以提高焊接效率及降低生产成本。
机器人在汽车工中占的比重越来越大。特别是2009年以来,我国汽车行业发展迅速,一批优秀的汽车企业不断壮大。
同时,随着经济水平的提高,汽车的需求量也逐步上升。汽车产业焊接机器人明显增加,且已普遍采用了自动式弧焊、点焊机器人。目前,焊接工业机器人在整车制造企业广泛应用,实现了汽车车身制造的量产化与自动化。
焊接机器人在汽车生产线上的应用,明显提高了工作效率和工艺水平。虽然焊接机器人在汽车工业中运用越来越广泛,但是传统的串联机器人刚度较低,有一定不足;并联机器人的工作空间明显较小并且结构复杂,存在一定的局限性。针对以上不足而设计的新型变胞焊接机器人能解决这些问题,在结构和性能上都具有一定的优势。
2 技术背景概述
随着科学技术的发展,机器人代替人进行高强度、高危险的作业是其趋势。焊接机器人在生产中占有很大比重,是节省人力和提高安全不可缺少的设备。焊接机器人有弧焊机器人和点焊机器人两种,是提高焊接质量、降低成本、改善工作环境的重要手段。
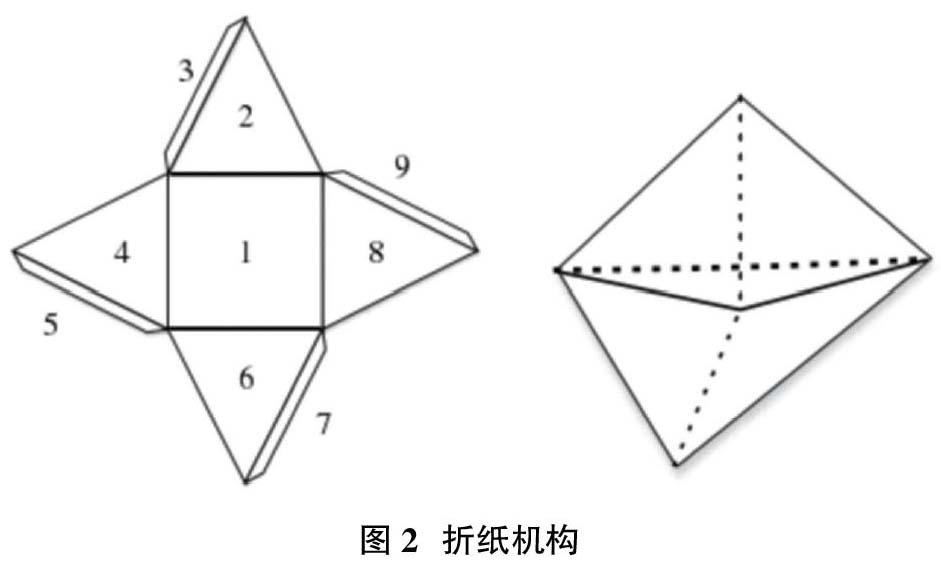
1952年,变胞机构起源于英国牛津大学。如图2所示的折纸机构即是Candy等人发现的。各面纸板相当于机械杆件,折痕相当于机械中运动副。1998年,戴建生教授首次提出变胞机构,具有变机构数量、变自由度的特点。
3 变胞焊接机器人的应用
布里汉杨大学的PARISE等在2000年引伸出变胞正交机构。
李威等提出一种新型变胞快速夹紧装置,用于铝合金汽车轮毅模具修理过程中的夹紧。
北京航空航天大学的丁希仑等人设计了一种火星探测变胞车(变结构式),通过杆件数量变化达到构态的变化。
天津大学戴建生教授带领团队研制出的新型“四足变胞爬行机器人”,如图3所示,为我国研究变胞机器人奠定了基础。
加拿大的航天研究部门研制了一款机械臂,既可聚拢,也可伸张。
叶伟基于变胞原理提出一种变结构并联机构;李宪芝设计了一款变胞装载机械手;并在实践中进行应用。
连杆变胞机构在码垛机械臂的应用中较多,有平面到空间和串并联的相互转化从而满足更多具体工况的任务要求。
广西大学王汝贵、袁华强团队等人设计了一种由连杆机构组成的变胞码垛机器人机构和一种变结构的码垛机器人,进行了运动学分析。高德中研制了甘蔗装载工作一种变胞装载机器人。(图4)
4 变胞机构的运动学分析方法
变胞机构的动力分析与运动过程中,构态发生变化,必须会导致自由度或者机构数量发生变化。戴建生提出了系列变胞机构的运动分析方法与理论应用,包括有矢量法,影响系数法,旋量法,指数积(POE)方法,矩阵法和李群李代数。
金国光等人采用Huston低序体阵列建立动态方程,通过矩阵运算及方应用仿真形成对比,透过曲线的振荡,来解决振动带来的影响。
梁栋使用关联矩阵法,采用矢量法对机构构态进行运动学建模和分析。
刘瑞雪和李端基于传统的Roberson-Wittenburg方法提出了一种的改进应用,并且通过运动仿真,验证了变胞机构在传统机构上更多构态所提出的新方法的正确性。
广西大学的丁侃以变胞装载机为研究对象,通过理论计算与运动仿真,并进行旋量理论分析,得到变胞装载机的相关运动数据。
5 结论
研究的新型变胞焊接机器人是基于传统串联式和并联式机器人的不足之处而提出的新型结构,与传统的焊接机器人相比较具有结构简单、承载能力大、速度高、动态响应好和转动惯量小。研究的新型变胞焊接机器人对于提高焊接精度、提高劳动生产率以及执行器灵活度程度具有实际意义。同时,与以往的焊接机器人相比具有较大的工作空间,而且带铰链的连杆做成轻杆,可以使整个机构动力性能更好且易于控制。在三个并联闭环子链上,杆件做成轻杆,机构运动惯量小,动力学性能好,对机构的微调节可以起到平衡的作用。新型变胞焊接机器人具有较大的刚性能使机器人机构承受更大的力和力矩。
参考文献:
[1]王亚伟.基于变胞原理的移动机器人的设计与研究[D].沈阳工业大学,2019.
[2]赵欣,康熙,戴建生.四足变胞爬行机器人步态规划与运动特性[J].中南大学学报(自然科学版),2018,49(09):2168-2177.
[3]郑书勤.基于变胞机构的仿蝗虫飞行跳跃机器人的机构设计与分析[D].电子科技大学,2018.
[4]陈辉庆,王汝贵.新型可控变胞式码垛机器人机构动态优化[J].机械设计与研究,2017,33(05):16-20.
[5]黄敏雄,胥刚,蔡敢为,戴建生.具有变胞功能的焊接机器人拓扑分析和工作空间建模分析[J].现代制造技术与装备,2015(06):146-148.
[6]袁华强.新型可控变胞式码垛机器人机构设计与分析[D].广西大学,2014.
[7]王汝贵,姜永圣,蔡敢为.一种变胞式码垛机器人机構设计分析[J].装备制造技术,2013(02):18-20.
[8]胥刚,朱双华,程泊静,黄志勇.变胞汽车焊接机器人动态焊接工艺参数的设计与优化研究[J].内燃机与配件,2019(09):113-118.