基于神经网络的四旋翼无人机旋翼长度估计算法
2020-03-22欧阳缮廖可非徐俊辉
杨 景, 欧阳缮, 廖可非, 徐俊辉
(桂林电子科技大学 信息与通信学院,广西 桂林 541004)
小型无人机具有体积小、安全性能良好、机动性突出、价格低廉、易于控制等优点,航拍时可低空巡视进行地物勘测,在灾难响应行动的搜索和救援等得到了广泛的应用。但同样也会被不法分子利用,进行反社会、不安全甚至犯罪行为,包括敌对侦察、碰撞(与人、其他小型无人机或更大飞机的碰撞),以及炸药或生物制剂的运输。因此,对小型无人机进行目标识别具有非常重要的意义。近年来,人们对雷达系统探测和识别无人机进行了广泛研究,但由于小型无人机的雷达散射截面(radar cross section,简称RCS)较小,与传统飞机相比飞行高度较低、速度较慢,无人机的检测与识别依然是一大难题。
近些年来,国内外对无人机检测、分类、识别进行了广泛的研究。文献[1-3]采用倒频谱方法估计无人机旋翼数、转动频率,但在低信噪比情况下误差较大。Chen等[4]采用深度学习的方法估计无人机的旋翼数、叶片数、旋翼长度、旋转频率,但是在特征选择方面丢失了最重要的时频特征数据,结果并不是很准确。文献[5-6]在微动特征骨架曲线的基础上对时频信号进行处理,当信噪比小于-14 dB时,时频分析结果中散射点的微多普勒曲线往往被噪声淹没,该方法基本不再适用。陈广锋等[7]根据最大微多普勒频率展宽结合旋翼旋转频率估计无人机的旋翼长度,但微多普勒频率展宽估计对噪声比较敏感,当信噪比较低时,无法精确估计出最大微多普勒频率展宽。针对低信噪比情况下无人机特征提取与参数估计的不足,提出一种基于神经网络的四旋翼无人机旋翼叶片长度估计算法。
1 四旋翼无人机叶片回波数学模型
1.1 四旋翼无人机回波建模
无人机的微动特征分析一般包括雷达回波模型建立、时频分析、参数估计[8],因此,如何准确建立无人机雷达回波模型是无人机微动特征分析的关键。文献[8-9]将叶片等效为均匀线条的刚体,RCS相同且为1,构建直升机叶片回波的积分模型。多旋翼无人机的回波模型[10-13]为
exp(-jΦn,k(t)),
(1)
其中:N为旋翼数;K为每个旋翼的叶片数;L为叶片长度;R0,n为第n个旋翼叶片旋转轴中心到雷达的距离;λ为波长;z0,n为第n个旋翼叶片旋转轴中心相对雷达的高度;βn为第n个旋翼叶片旋转轴中心到雷达的俯仰角,因各旋翼间的距离远远小于无人机到雷达之间的距离,故可近似认为β1=β2=…=βn=β;Ωn为第n个旋翼叶片旋转角频率;φ0,n为第n个旋翼初始角;Φn,k(t)为相位函数,
k=0,1,…,K-1。
(2)
1.2 四旋翼无人机回波信号特征
信号的相位函数的时间导数就是信号的瞬时频率,相位函数Φn,k(t)对时间求导数,可求出第n个旋翼第k个叶片的的瞬时频率,
(3)
由式(3)可知,四旋翼无人机旋转叶片的回波微多普勒随时间作周期性的正弦变换,正弦变换的周期与叶片旋转的频率相同,而正弦变换的幅度与叶片的长度L、旋转频率Ωn、俯仰角的余弦成正比,与波长λ成反比。
叶片上任意散射点P的瞬时微多普勒为
(4)
在实际中,由于旋翼叶片L上的强散射点的数目有限,叶片L的回波微多普勒频率为有限个强散射点对应的微多普勒频率叠加,而叶尖的强散射点的微多普勒频率幅度最大,最大微多普勒频率为
(5)
对于悬停状态的无人机,微多普勒频率的最大展宽为
(6)
由式(6)可知,可通过最大多普勒频移估计四旋翼无人机叶片长度。
对于四旋翼无人机,每个旋翼上的N叶片长度相同,旋转的角频率相同。由式(3)可知,同一个旋翼上的各个叶片所诱导的瞬时微多普勒频率均为正弦变换,且对应的正弦变换具有相同的幅度和频率,不同的是初相位。相邻叶片的瞬时微多普勒频率相位相差2π/N,若其中一个叶片的初相位为φ0,n,则其他叶片的微多普勒可认为由该叶片的瞬时微多普勒平移2πk/N得到。故可以通过平移量估计出叶片的个数。
无人机与雷达的位置关系如图1所示。设雷达的载频为70 GHz的单频信号,无人机采用大疆精灵4的参数,雷达与无人机的旋翼轴中心的夹角β为45°,雷达到无人机的旋翼轴中心的距离R0为2 000 m,各个旋翼到旋翼轴中心的距离为18.7 cm,每个叶片长度为12 cm,叶片旋转轴之间的距离为25 cm,叶片数为2。假设无人机为偏航运动,各旋翼的旋转频率为60 r/s,各旋翼叶片的初始角φ0为0°。采用Gabor变换对无人机的微多普勒进行仿真,两叶片旋翼微多普勒特征仿真结果如图2所示,两叶片旋翼时域特征仿真结果如图3所示。
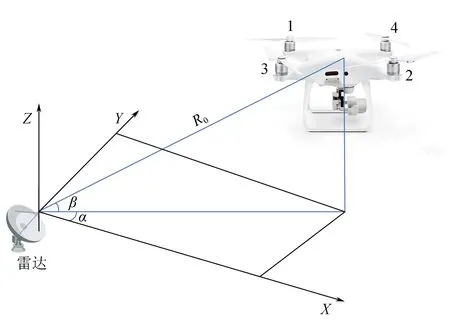
图1 无人机与雷达的位置关系
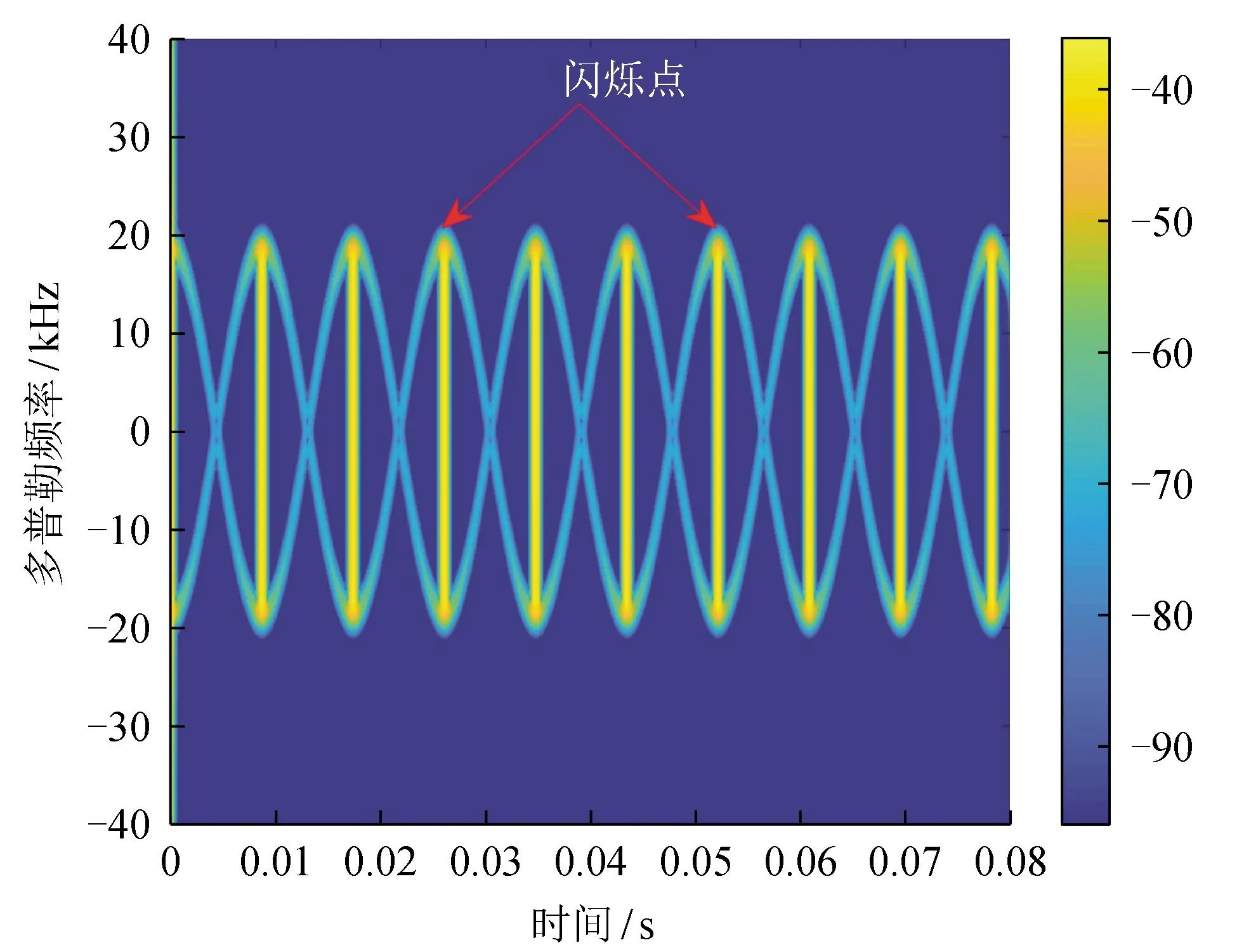
图2 两叶片旋翼微多普勒特征
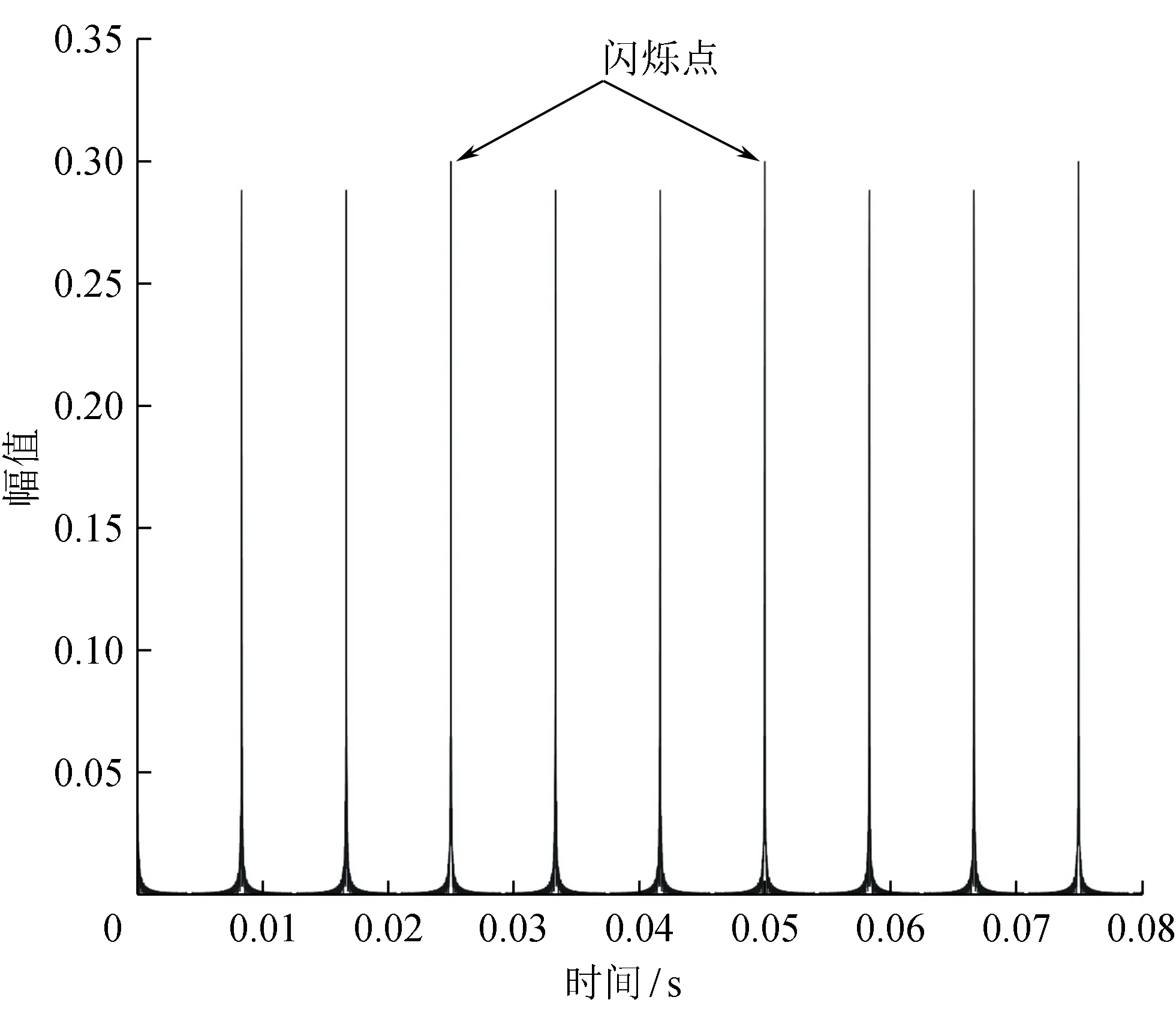
图3 两叶片旋翼时域特征
当叶片在接近点(或前沿点)和后退点时有镜面反射,叶片回波会产生短暂的闪烁[10]。此时时域回波时域幅度出现尖峰,即时域存在闪烁,微多普勒特征在时域闪烁对应时刻出现频率带,即时频域存在闪烁,而闪烁点的间距与旋翼叶片的旋转频率有关,时域回波受sinc函数调制。当
时,回波幅度最大,在时域出现峰值。当
时,回波幅度由峰值快速下降。由傅里叶变换可知,sinc(t)和rect(f)是傅里叶变换对,
(7)
因此,当时域出现sinc峰值包络时,对应的频域将出现占据一定宽度的频率带。由文献[11]可知,对于悬停的无人机,当叶片与雷达视线垂直且靠近雷达时,频带为(0,fmD,max),当叶片与雷达视线垂直且远离雷达时,频带为(0,-fmD,max)。闪烁点的时间间隔与旋翼的旋转频率有关,闪烁点的持续时间取决于旋翼叶片长度L、波长λ及旋翼的旋转频率Ωn,故可根据叶片在散射点位置提取最大微多普勒频率fmD,max。对于旋翼上同一个叶片的微多普勒,相邻的闪烁中心的时间差等于旋翼微多普勒正弦周期的1/2,故根据闪烁中心的时间差可求出旋翼的旋转频率。
2 四旋翼无人机特征提取与参数估计
2.1 旋翼叶片数的估计
对于同一个旋翼上的相邻叶片,其瞬时微多普勒频率正弦曲线的相位差Δθ为2π/N,相邻叶片的相位时间平移量为Δt,而Δθ=Δtω,故可推导出叶片个数为
(8)
2.2 旋翼叶片旋转角频率估计
四旋翼无人机旋转叶片的回波微多普勒随时间作周期性的正弦变换,叶片的旋转频率与微多普勒频率作正弦变换的周期相同,因此可通过fmD,max求得,fmD,max的周期可以通过求取相邻2个频率达到fmD,max的时间差Δt来求得。因此,旋翼旋转频率Ωn的估计值为
(9)
由于受客观条件的限制,无法精确提取旋翼单个叶片微多普勒的正弦曲线。在低信噪比情况下,微多普勒频率达到fmD,max的具体时间无法精确估计。微多普勒频率为-fmD,max、fmD,max时,时频曲线将出现闪烁点。旋翼旋转频率Ωn可通过时频图中相邻闪烁点的时间差求得。在时域出现闪烁点,也可根据时域相邻闪烁点的时间差估计Δt。
2.3 旋翼叶片长度的估计

(10)
2.4 TFD-Radon变换时频特征提取
Radon变换是一种积分变换,常用于灰度图直线检测。灰度图像素较高时,Radon变换积分过程中会出现亮点;灰度图像素较低时,Radon变换积分过程会出现暗点。Radon变换在积分过程中抵消了噪声的起伏,映射到变换域下的信噪比比原图像空间域的信噪比高[14],因此,Radon变换被用于低信噪比图像检测。
Radon变换的基本思想是将图像中直线ρ=xcosθ+ysinθ上的点(x,y)映射到Radon空间的一点。其计算式为
(11)

2.5 算法设计及流程

1)对回波信号进行Gabor变换,获得时频图;
2)对时频图进行Radon变换,获得Radon变换图;
3)将Radon变换图及信号的时域、频域信息作为神经网络的输入,旋翼叶片长度作为输出,训练神经网络;
4)将时频图、Radon变换图以及时域、频域分别代入各个子神经网络,最后将子网络特征提取结果信息融合估计出无人机的旋翼叶片长度。
3 基于神经网络的旋翼长度估计仿真验证
3.1 信号的产生
仿真采用的雷达载频为70 GHz的单频信号,雷达与无人机的旋翼轴中心的夹角β为45°,雷达到无人机的旋翼轴中心的距离R0为2 000 m,叶片数目为2,信号的采样率为fs=80 kHz,采样时间为20 ms,时域采样数为1 600。旋翼的其他参数为:1)4个旋翼的的旋转频率均匀分布在[30,80];2)旋翼叶片的初始相位均匀分布在[0,2π];3)4个旋翼的叶片长度相等且均匀分布在[0.25 m,0.45 m];4)信噪比分别为10、5、0、-5、-10、-11 dB。
3.2 信号的预处理
信号的预处理过程为:
1)由时域信号通过FFT计算出信号的频域信号;
2)对时域信号做窗函数512点的Gabor变换;
3)对Gabor变换时频信号进行Radon变换,求出Radon变换域信息。
3.3 卷积神经网络模型及样本训练
卷积神经网络包括3个部分:
1)对于微多普勒信号及Radon变换信号的网络采用LetNet5卷积神经网络改进模型,将输入改为512×192×2,输出为微多普勒信号及Radon变换信号特征提取结果,其结构为16×1,隐藏层网络结构不变。
2)对于时域和频域的实部、虚部及其模值结果,分别采用图4的网络结构,其输出为特征提取结果,结构为16×1。
3)通过全连接层,将16×6的信号作为输入,微多普勒信号、Radon变换信号、时域、频域信号特征提取结果按照比例进行信息融合,输出为旋翼叶片长度,其信息融合网络架构如图5所示。

图4 BP网络神经结构示意图

图5 信息融合网络架构
每个信噪比仿真5 000个样本数据,其中2 000个样本作为训练集,1 000个样本作为验证集,2 000个样本作为测试集,预测评价指标采用平均绝对百分误差。
3.4 旋翼长度估计结果分析
旋翼叶片长度估计的相对误差为
(12)

与文献[12]方法比较,不同信噪比下旋翼长度估计相对误差如表1所示。从表1可以看出:在信号信噪比高于-11 dB时,本算法能够更加精准估计出无人机旋翼长度,且随着信噪比增大,旋翼叶片长度估计相对误差越来越小;当信噪比大于10 dB时,相对误差低于1%,旋翼叶片长度估计相对误差远小于文献[12]方法,而在-11 dB信噪比条件下,由于噪声较强,时频图的微多普勒特征很模糊,文献[12]方法无法估计最大微多普勒频率的展宽,无法估计出叶片长度,但本算法仍能准确估计出旋翼叶片长度。

表1 不同信噪比下旋翼长度估计相对误差
4 结束语
针对低信噪比情况下无人机特征提取与参数估计的不足,提出一种基于神经网络的四旋翼无人机旋翼叶片长度估计算法。将Gabor变换的时频信号和Radon变换信号作为卷积神经网络输入,将时域信号、频域信号作为BP神经网络的输入,并将BP神经网络输出与卷积神经网络的输出信息融合,估计出无人机旋翼的长度。由于在特征提取中,保留了时域信息、频域信息以及时频信息,采用了改进的神经网络模型,能够更加精准估计无人机的旋翼叶片长度。在黑飞无人机中,鸟类的雷达接收信号和无人机很相似,但并没有区别鸟类和无人机,今后将研究鸟类与无人机的识别问题。
