基于改进幂次趋近律的滑模控制H桥逆变器的非线性行为
2020-03-20吴荣华
胡 娟,江 伟,吴荣华
(东华理工大学 放射性地质与勘探技术国防重点学科实验室,江西 南昌 330013)
逆变器是一个强非线性系统,运行过程中会出现倍周期分岔、切分岔、非混沌奇怪吸引子、共存吸引子、阵发混沌和次谐波振荡等非线性行为[1-2].对H桥逆变器的研究已由DC-DC变换转至DC-AC变换.2002年,Robert团队首次将电力电子变换器的非线性研究拓展至逆变器[3],随后将时滞反馈控制和扩展时滞反馈控制引入SPWM-H桥逆变器[4],以扩大稳定运行的参数域[5].文献[6]将正弦电流作为参考电流,分析了SPWM-H桥逆变器中的分岔及混沌现象.文献[7]建立了快变和慢变尺度的离散模型.文献[8]运用分岔图、折叠图、Lyapunov指数谱及功率谱图,分析了SPWM-H桥逆变器的分岔及混沌行为.然而,上述研究只分析了线性控制下的H桥逆变器,非线性控制下的H桥逆变器的非线性行为有待研究.
滑模控制因其响应速度快、参数扰动小、鲁棒性强及物理实现简单等优点,广泛应用于H桥逆变器[9-11].然而,H桥逆变器中,有不能瞬时切换的开关器件,存在滞后和惯性,出现抖振现象,影响设备性能甚至使用寿命.文献[12]的研究结果表明此类抖振不能完全消除,只能减轻.文献[13]提出了一种应用于机械臂的消抖参量,从理论上证明了改进的幂次趋近率相对于传统趋近率,具有更好的滑模运动品质和更快的收敛速度.受该文献的启发,笔者将该参量应用于滑模控制H桥逆变器中,并对其出现的非线性进行如下研究:推导基于改进幂次趋近律的滑模控制H桥逆变器的离散数学模型,应用折叠图和分岔图分析不同控制参数下逆变器出现的非线性行为.
1 改进幂次趋近律的滑模控制H桥逆变器的工作原理
将改进幂次趋近率应用于逆变器中的滑模控制器.改进幂次趋近律的滑模控制H桥逆变器的工作原理如图1所示.图1(a)为H桥逆变器主电路图,逆变器由直流电压源E、4个开关管S1~S4、负载电阻R和电感L组成.图1(b)为H桥逆变器的控制电路.

图1 改进幂次趋近律的滑模控制H桥逆变器的工作原理
逆变器工作过程为:比较电感电流i与参考电流iref得到误差信号e,将误差信号e送至滑模控制器得到控制量u,将控制量送入PWM驱动电路,由PWM驱动电路交替控制开关管S1,S3和S2,S4.当S1,S3闭合、S2,S4断开时,逆变器工作在模态1;当S2,S4闭合、S1,S3断开时,逆变器工作在模态2.模态1,2的状态方程分别为
(1)
(2)
其中:i为电感电流,v为输出电压.
改进幂次趋近律的滑模控制H桥逆变器的负载信号波形如图2所示.图2中,TS为开关周期,第n个开关周期内,模态1的持续时间为tn,此时负载电流处于上升阶段,模态2的持续时间为TS-tn,此时负载电流处于下降阶段,占空比d=tn/TS.当参考电流为直流时,逆变器工作在直流斩波状态,输出直流信号;当参考电流为正弦波时(iref=Asin2πf1t,fS≫f1),逆变器工作在正弦逆变状态,输出交流信号.

图2 逆变器负载的电流(实线)和电压(虚线)波形
2 离散模型
为了分析改进幂次趋近律的滑模控制的H桥逆变器的非线性行为,采用频闪映射法,以开关频率为尺度建立离散模型.频闪映射建模的核心思想是:用第n个开关周期的采样值表示第n+1个周期的采样值[7],得到负载电流的迭代关系为
(3)
其中:dn为第n个开关周期的占空比,其表达式为
(4)
其中:u为改进后的幂次趋近律的消抖参量,其表达式为
u=-k1|e|αsgn(e)-k2e2sgn(e),k1>0,k2>0,0<α<1,
(5)
其中:e为负载电流采样时刻的值与参考电流的差值,其表示式为
(6)
(7)
(3)~(4)式构成逆变器的离散模型.
3 改进幂次趋近律的滑模控制的H桥逆变器的非线性分析

3.1 折叠图
任选一个电流初值代入逆变器的迭代方程,忽略不稳定的前20个周期,将稳定后的50个周期按采样时刻对齐后折叠,绘制逆变器的折叠图.
取k1=0.15,分别绘制k2=0.1,0.3,0.45,0.7,0.85,1.5时的折叠图,结果如图3所示.
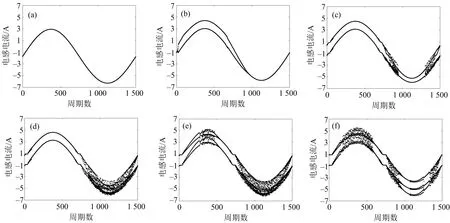
(a)k2=0.1;(b)k2=0.3;(c)k2=0.45;(d)k2=0.7;(e)k2=0.85;(f)k2=1.5.图3 k1=0.15时,不同k2值下的折叠图
由图3可知,当k2=0.1时,图形为一条光滑的正弦曲线,稳定后的50个采样点完全重合,说明处于稳定的周期1状态;当k2=0.3时,峰值附近处于周期2状态,谷值附近处于稳定的周期1状态;当k2=0.45时,峰值和谷值附近均处于周期2状态;当k2=0.7时,谷值附近处于混沌状态,峰值附近处于周期2状态;当k2=0.85时,峰值和谷值附近均出现一定区域内的密集填充,说明二者均处于混沌状态;当k2=1.5时,峰值附近处于混沌状态,谷值附近处于周期6状态.
取k2=0.2,分别绘制k1=0.1,0.3,0.7,0.9,0.97,1.5时的折叠图,结果如图4所示.
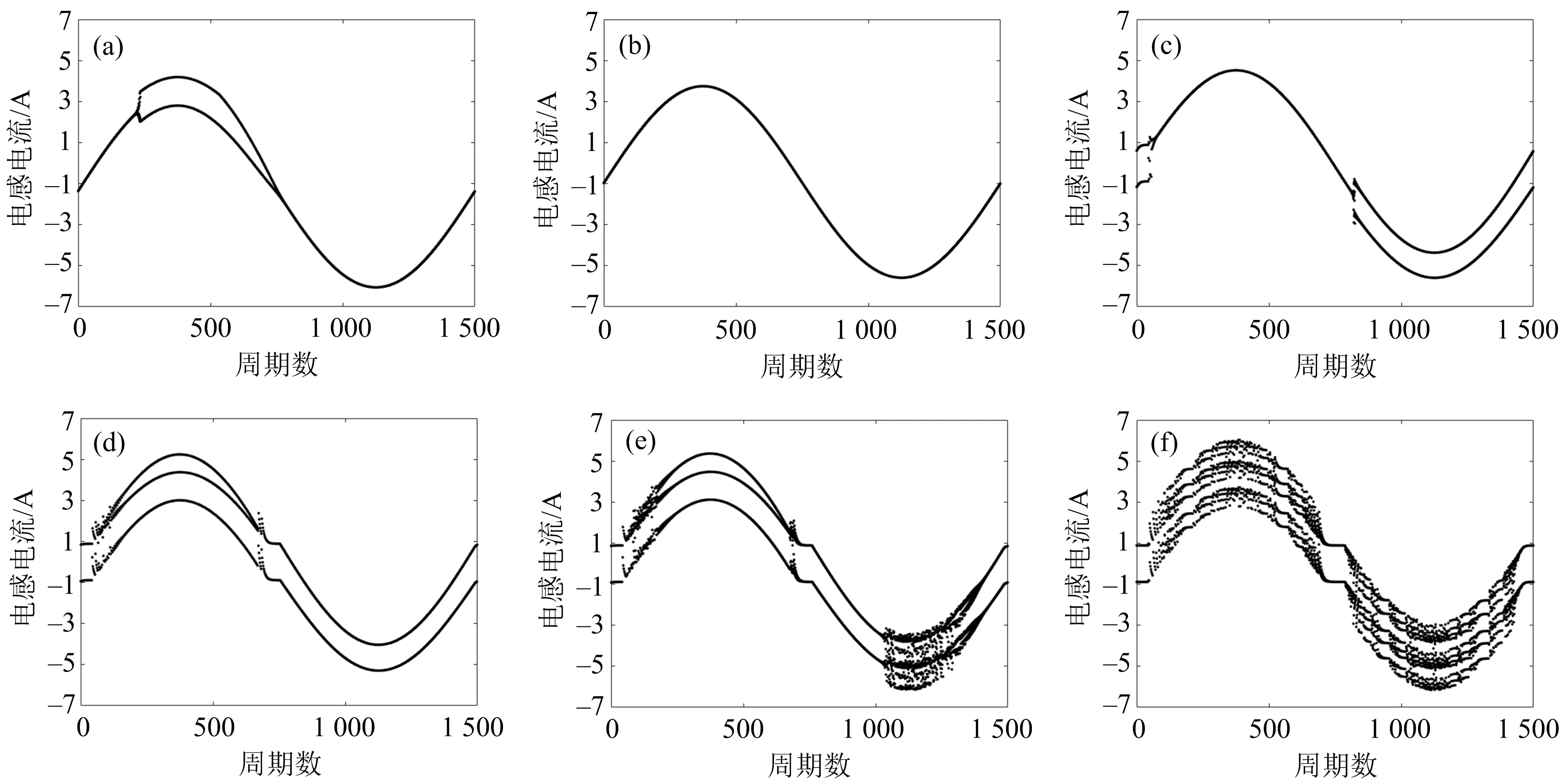
(a)k1=0.1;(b)k1=0.3;(c)k1=0.7;(d)k1=0.9;(e)k1=0.97;(f)k1=1.5.图4 k2=0.2时,不同k1值下的折叠图
由图4可知,当k1=0.1时,峰值附近处于周期2状态,谷值附近处于稳定的周期1状态;当k1=0.3时,50个采样点完全重合,说明处于稳定的周期1状态;当k1=0.7时,谷值附近处于周期2状态,峰值附近处于稳定的周期1状态;当k1=0.9时,峰值附近处于周期3状态,谷值附近处于周期2状态;k1=0.97时,峰值附近处于周期3状态,谷值附近处于混沌状态;k1=1.5时,采样点从峰值到零点,同时存在5,6,8等倍周期状态,从零点到谷值,同时存在5,7,9等倍周期状态,可见,逆变器中同时出现了多倍数的周期状态.
3.2 分岔图
忽略不稳定的前20个周期,在稳定后的50个周期的峰值及谷值附近采样,分别绘制以k1和k2为参数的分岔图.
取k1=0.15,绘制峰值和谷值附近采样的分岔图,结果如图5所示.

图5 k1=0.15时,k2分岔图
由图5可知,当0≤k2≤0.2时,不论峰值还是谷值附近50个采样点完全重合,处于稳定的周期1状态;当0.2 取k2=0.2,分别绘制峰值和谷值附近采样的分岔图,结果如图6所示. 图6 k2=0.2时,k1分岔图 由图6可知,当0 笔者以基于改进幂次趋近律的滑模控制H桥逆变器为研究对象,建立逆变器的离散模型,采用折叠图、分岔图分析了在不同控制参数下逆变器的稳定性.研究结果表明:基于改进幂次趋近律的滑模控制H桥逆变器同时出现了多倍数周期状态,呈现丰富的非线性.研究结果对于改进幂次趋近律的滑模控制的H桥逆变器的设计具有指导意义.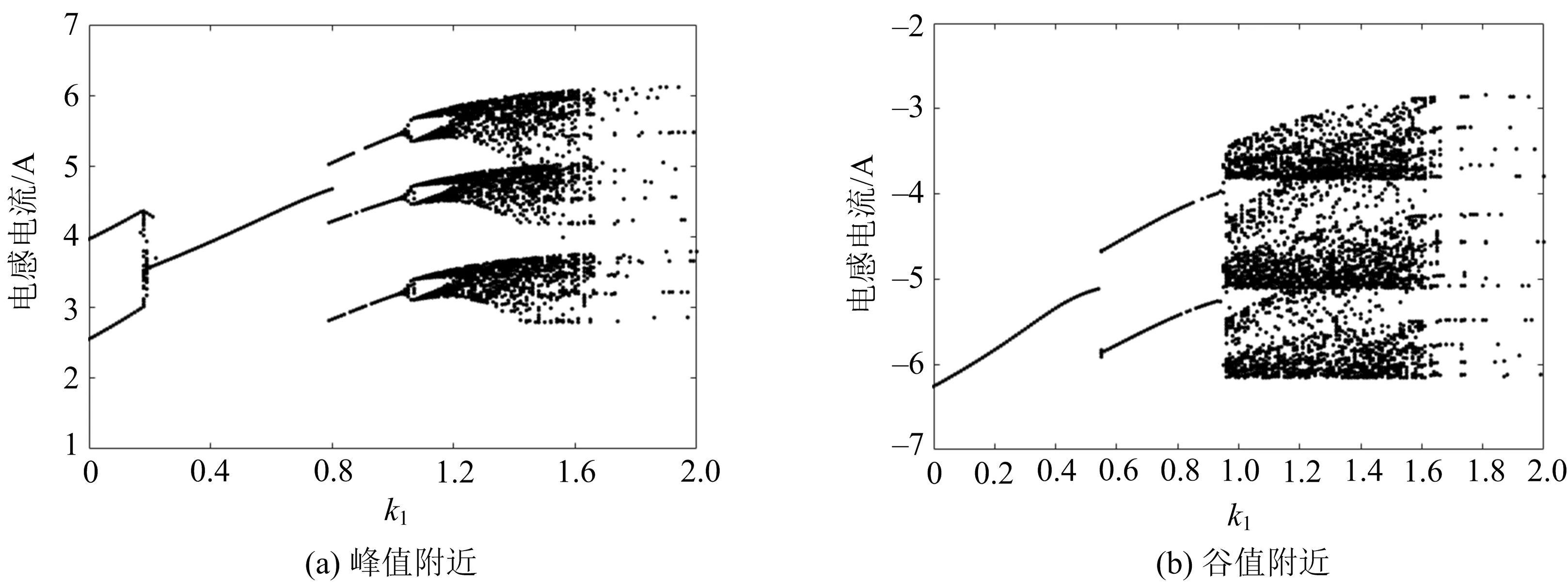
4 结束语
