基于铱星/INS组合定位技术在船舶中的应用研究
2020-03-19秦红磊杜岩松孙桂宇周广涛
秦红磊,赵 超,杜岩松,孙桂宇,周广涛
(1.北京航空航天大学电子信息工程学院,北京 100083;2.哈尔滨工程大学自动化学院,哈尔滨 150001)
0 引言
目前,国内外船舶上的导航设备主要是将全球卫星导航系统(Global Navigation Satellite System,GNSS)与惯性导航器件进行联合使用,利用二者存在较好的互补性,从而实现较高精度的组合导航[1]。然而在战时环境,GNSS信号容易受到干扰,使得系统无法使用[2-4]。因此,研究GNSS信号拒止条件下的备份导航系统已成为各国应对导航战的重要研究方向。
利用广泛存在的各类非导航无线电信号进行导航与定位已引起各个国家的重视。以美国和英国为代表的一些国家开始装备和研发基于机会信号的备份导航系统。2010年美国国防部宣称开展“全源导航”计划,将使用广泛存在的各类无线电资源直接进行导航与定位;2012年英国公布了研发的Navsop系统,使得用户能够利用各种不同的无线电信号实现定位。
其中,利用非合作、非导航星基机会信号进行定位具有覆盖区域广、抗干扰能力强和无需投入建设成本等优点[5-6],已成为机会信号定位的重点研究方向之一。铱星卫星信号是典型的天基非合作外辐射源[7],地面接收机通过接收铱星所发射的下行信号,并有效提取信号中的瞬时多普勒频移观测量[8-10],实现对地面接收机的定位。
惯性导航系统(Inertial Navigation System,INS)是船舶导航的必备系统之一,但INS具有误差随着时间累积而迅速扩散[11]的固有缺点。一般采用GNSS与INS组合实现高精度的定位。但在GNSS信号拒止环境下,GNSS/INS系统则无法有效工作。此时,利用铱星瞬时多普勒频移,结合INS测量信息,通过将观测量紧组合的方式,实现对惯导误差的纠正[12-14],可以有效提高船舶的定位精度。
本文的结构如下:首先,介绍了铱星的轨道信息,并对铱星信号体制进行深入分析,为接收瞬时多普勒频移提供理论基础;其次,建立了利用瞬时多普勒频移进行定位的理论模型;然后,介绍了利用铱星瞬时多普勒频移与INS进行紧组合的数学模型;最后,搭建了铱星/INS组合定位系统,利用实际信号进行了实际环境的船舶动态定位试验。
1 铱星系统及其信号体制研究
卫星的星座布局结构会决定地面接收机对其信号接收的可见性及可用性,卫星的信号体制也决定了信号接收平台的设计复杂性以及瞬时多普勒频移的信号提取方法。本节主要介绍了铱星系统的轨道设计及其信号体制,为铱星机会信号定位系统的硬件设计及信号捕获处理方法提供基础。
1.1 铱星系统轨道
铱星系统是美国铱星公司委托摩托罗拉公司设计的一种全球性卫星移动通信系统,透过卫星可在地球上的任何地方拨出和接收电话信号。由于使用成本过高,2000年3月铱星公司宣布破产。最终,私募基金出手接盘了铱星系统,将它变身为铱星通讯公司。
铱星系统由6条极地轨道组成,轨道高度为780km,如图1所示。2017年,Iridium Next第二代卫星开始发射,由66颗工作卫星、9颗空间备份卫星以及6颗地面备份卫星组成。截止到目前,地面接收机可以接收到75颗铱星卫星的发射信号。
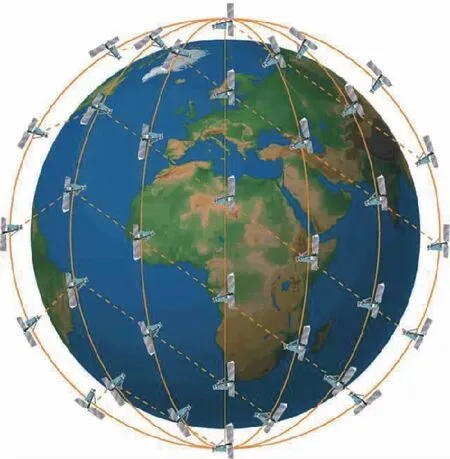
图1 铱星极地轨道Fig.1 Iridium polar orbit trajectory
1.2 铱星系统信号体制
铱星的链路频率分配计划如图2所示。

图2 FDMA频率分配Fig.2 FDMA frequency allocation
铱星将1616.0MHz~1626.0MHz频率段分配为双工作业信道,而将1626.0MHz~1626.5MHz频率段分配为单工信令信道。双工作业信道通过频分多址(Frequency Division Multiple Access,FDMA)的方式分为30个子带,每个通道配有工作频宽和保护频带。而单工作业信道分为12个频带,每个频带宽度为41.67kHz。其中,单工信道里的波束每48帧发一次,通常用户在4.32s里可以接收到一次下行信号,其信号时长为7~20.32ms之间。但由于每个TDMA帧的帧长为90ms,因此实际接收到的90ms时长数据内仅有一个下行的铱星信号。
铱星下行传输信号呈现突发信号模式,其信号结构主要包含三部分:无调制的导频信号、BPSK调制信号以及QPSK调制信号,其中导频信号时长大约为2.6ms。由于导频通道不含任何调制方式,仅仅是一种规律的单弦波,因此非常适合用来提取铱星与地面接收机相对运动所产生的瞬时多普勒频移。
受限于轨道高度,同一时刻内仅能观测到1~2颗铱星,仅在非常空旷的地方可以同时观测到3颗卫星,因此接收机难以实现实时定位。采用时间换空间的方法,通过挑选卫星飞行可视时间内的不同时间点上的历元,提取相应时刻的瞬时多普勒信息,并结合SGP4模型及TLE轨道信息推算卫星在当前时刻的位置及速度,采用最小二乘算法即可实现接收机的定位功能。
2 瞬时多普勒频移定位算法研究
基于非导航卫星定位系统可以利用瞬时多普勒测量信息实现即时定位,卫星相对于地面做高速运动,因此产生多普勒现象。其中多普勒频率又能够反映卫星位置和接收机位置之间的联系,因此可以利用多颗卫星的瞬时等多普勒圆锥曲面交叉获得接收机的位置。
如果某一时刻在地球表面的静止接收机测量得到卫星的多普勒频移,在不考虑任何误差的情况下,所有相同多普勒测量值构成一个圆锥体表面,如图3所示。
得到的多普勒频移可以表示为
(1)
其中,λ代表铱星下行信号的载波频率,rsat和ruser分别代表卫星和用户的位置,vsat代表卫星速度。
以下为利用多普勒频移进行定位的原理。用代数的方式描述多普勒导航,从与伪距相关的线性导航状态更新方程开始,即
(2)

(3)
式中,δL代表测量多普勒与预测多普勒的偏差,δx′、δy′和δz′为接收机先验速度的更新状态,δb′为先验频率偏移的更新状态。如果接收机是动态状态,则式(3)可以表示为
(4)
式中,e(K)代表从先验位置到第K颗卫星方向的单位向量。利用最小二乘算法可以获得
(5)
其中,式(5)中的雅可比矩阵可以表示为
(6)
同时多普勒导航中的PDOP可以由式(7)得出[16]
(7)
3 铱星/INS组合动态定位算法
本文采用扩展卡尔曼滤波(Extended Kalman Filter,EKF)算法实现铱星与INS紧组合,选取载体位置、速度及姿态的误差值以及钟差和频差为状态量。将得到的误差值形成滤波器的测量输入值,经组合导航滤波器,生成惯导系统的误差估值,这些估值可在每次测量更新后对惯导系统进行修正,以提高惯导的精度。这种组合方式根据铱星TLE解算出铱星轨道信息和INS输出的位置和速度信息,计算得到相应于INS位置和速度的瞬时多普勒值,并将其与接收机提取到的瞬时多普勒值相比较,将它们的差值作为组合系统的观测量。通过EKF对INS的误差进行最优估计,然后对INS进行输出校正。具体流程如图4所示。

图4 铱星/INS组合定位算法原理Fig.4 Iridium/INS integrated positioning algorithm principle
铱星和惯导紧组合导航系统提供接收机测得的瞬时多普勒duser和INS的反推多普勒desti,两者之差duser-desti作为EKF的观测量。因为每一时刻只能接收到1颗铱星的信号,所以观测量只有1个。铱星惯导组合导航系统的观测方程是由伪距定位观测方程推导得出,即
∂L=Hδx+ε
(8)
其中,v为卫星速度与载体速度差值,r为卫星与接收机之间的几何距离,δψx、δψy、δψz分别为3个方向上的姿态变化量,δtu和δtru分别为钟差及钟漂值。即便在接收到1颗铱星的条件下,只要能够有效提取多普勒信息并代入铱星/INS组合定位算法中,就可以对惯导误差起到纠正作用。
以下为惯导的修正过程:在无法获得铱星卫星信号的情况下,更新载体导航信息时,用前一时刻载体的导航信息加上纯惯导解算出的当前时刻与前一时刻载体导航信息的差值,得到当前时刻载体的导航信息,即
(9)

在铱星卫星信号可获得情况下,载体导航信息更新过程是在式(9)的基础上,再减去EKF计算出的当前时刻导航信息的修正量,如下所示
(10)
4 实验验证
为了能够验证本文所提的铱星/INS组合定位算法的有效性,于2019年8月19号在吉林省吉林市松花湖进行了现场试验,如图5所示。实验共采集55min铱星数据以及惯导数据。在实验用船上安装了铱星接收天线及信号采集设备、光纤惯导系统以及用于标定的高精度GNSS/INS组合系统。

图5 现场实际实验设备安装场景图Fig.5 Scene of field actual test equipment installation
本系统中所采用的光纤惯导设备指标如表1所示。
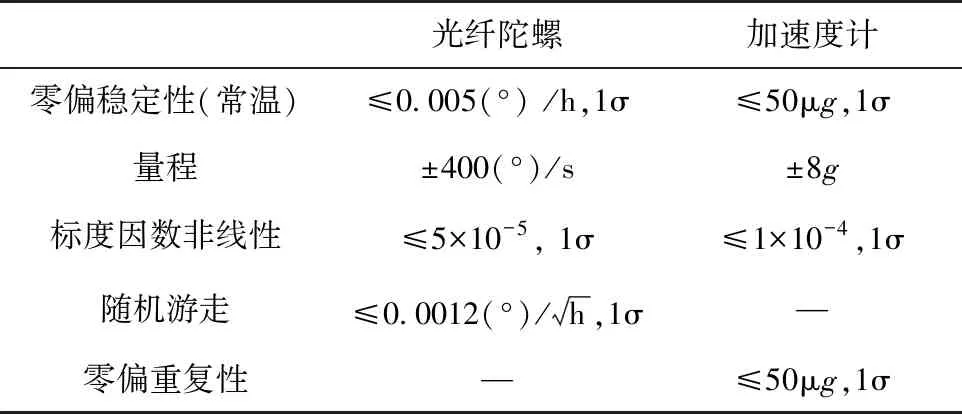
表1 惯性测量单元指标Tab.1 Inertial measurement unit index
可以看出,本系统所采用的惯导设备测量精度比较高,可以满足船舶在水中甚至更加复杂环境下的动态定位功能。
4.1 铱星信号处理结果
对采集的铱星第7通道信号进行捕获处理。首先需要对采集信号进行带通滤波。带通滤波器的中心频率为7通道发射频率1626.270833MHz,带宽为32kHz。提取铱星信号中的瞬时多普勒频移观测量,用于铱星/INS组合定位,对接收到的信号进行一系列预处理后,得到铱星下行信号如图6所示。

图6 信号捕获结果Fig.6 Signal acquisition results
可以看到,接收到的信号信噪比较高,便于信号检测及捕获。对采集到的信号进行捕获,获得采集信号的中心频率,减掉7通道信号的载波频率,得到的接收信号的瞬时多普勒频移观测量,结果如图7所示。

图7 提取瞬时多普勒频移结果Fig.7 The extracted instantaneous Doppler frequency shift
从图7可以看出,在信号采集期间共接收到6颗位于接收机正上方的铱星信号,以及接近7颗旁侧轨道的铱星信号。
4.2 铱星/INS组合定位处理结果
纯惯导系统、铱星/INS组合系统及高精度GNSS/惯导组合系统的定位结果如图8所示。

图8 轨迹对比图Fig.8 Trajectory contrast diagram
下面将航行过程分为初始阶段、过渡阶段和惯导发散阶段3个阶段,对定位结果进行展开讨论,并对终点定位结果进行分析。
(1)第一阶段:初始阶段
在航行的前7min内,由于惯导系统刚结束自主式初始对准,此时惯导实际的平台系的误差较小,因此这段时间内惯导系统输出的定位结果与标定系统的结果比较接近,在初始阶段纯惯导动态定位结果误差小于铱星。
(2)第二阶段:过渡阶段
在航行过程的第7min~第40min内,惯导系统输出的定位结果已经出现明显的发散现象。主要是因为惯导器件误差会随着时间开始累积,导致定位结果偏离实际路线。由于在海平面航行过程中的高度保持一致,因此借助于高程辅助,分别统计第二阶段纯惯导与铱星/INS组合定位系统与GPS/INS系统之间的二维水平定位误差,结果如表2所示。

表2 第二阶段定位误差统计Tab.2 Positioning error statistics in the second stage
可以看出,在第二阶段利用铱星/INS组合导航算法可以有效改善纯依赖惯导系统的定位精度,二维水平误差RMSE值分别改善36.8%。
(3)第三阶段
第三阶段可以看出,惯导系统定位结果已经远离载体的实际位置,铱星/INS组合系统在真值附近波动,可以有效纠正惯导系统的累积误差,提高定位精度。统计第三阶段二维水平定位误差结果如表3所示。

表3 统计二维水平误差Tab.3 Statistical two-dimensional horizontal error
从表3中可以看出,铱星/INS组合系统水平定位误差显著低于纯惯导系统。其中,RMSE值降低64.6%,对惯导误差的修正效果明显。
(4)最终时刻误差分析
从图7中可以看出,在最后一个时刻点,惯导系统的定位结果已经远远偏离真实轨迹点,而组合系统的定位结果更加靠近真实点。对最后一个时刻的定位结果进行统计,如表4所示。

表4 最后时刻点定位误差统计Tab.4 Final point positioning error statistics
从表4中可以看出,本文所提的铱星/INS组合定位算法可以有效纠正惯导输出误差。其中,相比于惯导定位系统,铱星/INS组合系统在东向、北向及二维水平方向上定位精度可以提高93.3%、61.3%及86.7%,验证了本文所提算法的有效性。
5 结论
针对GNSS拒止环境下惯性/GNSS组合导航系统无法应用的问题,本文提出了通过提取非导航卫星(铱星)与接收机之间相对运动所产生的瞬时多普勒频移,并结合惯导输出的位置、速度、姿态等观测量,实现船舶的动态定位。通过分析实际实验数据,结果表明:
1)通过将观测多普勒与计算所得到的多普勒值之间的误差值作为EKF的观测量,从而达到修正惯导定位误差的效果。同时,还有效弥补了铱星可见性不足的缺点。
2)相比于纯惯导系统所得到的定位精度,本文所提出的铱星/INS组合动态定位算法可以有效解决惯导误差累积的问题。
3)本次数据采集仅持续了55min,在数据采集的最后一个时刻点,纯惯导系统定位结果已经远离船舶的真实位置而变得无法使用,而采用本文所提铱星/INS组合定位算法得到的定位结果更加靠近真实位置点。未来还需要验证在更长时长条件下铱星/INS组合定位算法的可用性。同时还需要考虑到铱星轨道高度低、覆盖面积小,在未能接收到铱星信号时惯导误差随时间变化的影响。
