多元宇宙优化的林区道路图像检测方法
2020-03-13义2康益堃2黄思瑜耿浩宇程玉柱
黄 元, 付 义2, 康益堃2, 黄思瑜, 耿浩宇, 程玉柱
(1.南京林业大学机械电子工程学院,江苏 南京 210037;2.南京林业大学土木工程学院,江苏 南京 210037)
本文提出一种基于多元宇宙优化算法的林区道路图像检测方法,经不同算法的融合、快速迭代、图像灰度图转化,通过阈值优化实现目标提取。
1 图像检测系统
1.1 算法流程
算法流程框图如图1所示。
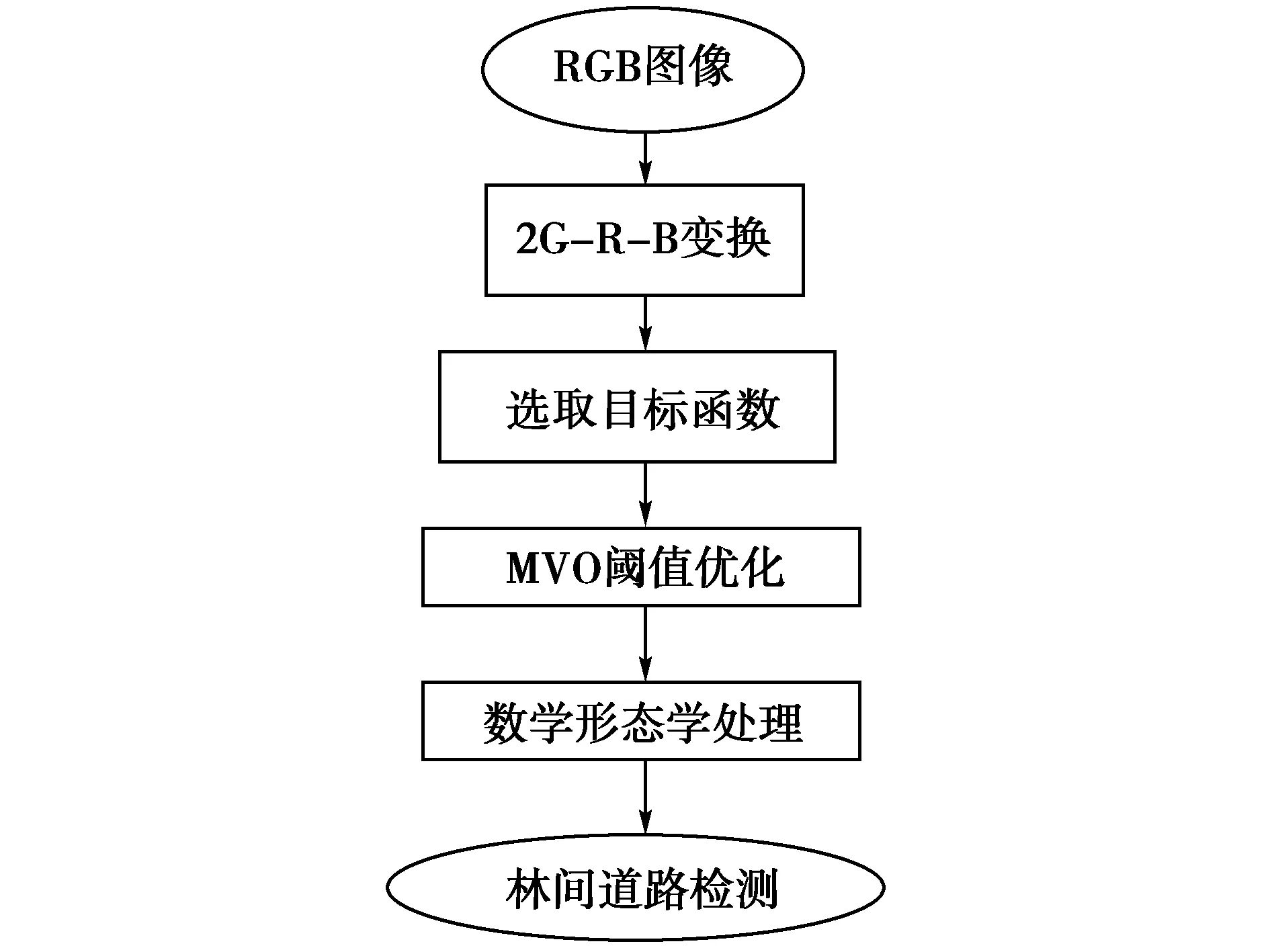
图1 算法流程框图
首先输入林区道路RGB彩色图像,然后经过2G-R-B变换得到灰度图像。对灰度图进行多元宇宙优化算法处理,得到林区道路目标,然后利用数学形态学滤波处理,最后利用道路形状特征,实现林区道路的检测[9]。
1.2 灰度化
林区道路两旁存在大量的树木,采集的图片中道路极容易被遮挡,还存在大量无用背景,产生许多噪声。根据彩色图像的像素值分布不同,利用绿色成分显著的特点,将2G-R-G分量作为灰度图。
I=2*G-R-B
(1)
式中:R、G、B分别为彩图的红、绿、蓝三原色分量。
1.3 多元宇宙优化算法
“多元宇宙”指的是除了我们所生活的宇宙,还存在其他宇宙[10],多个宇宙相互作用,甚至可能相互碰撞,每个宇宙中可能存在不同的物理定律。多元宇宙理论包括白洞、黑洞和虫洞。令:
(2)
式中:U为由多个宇宙组成的搜索空间;d为参数(变量)的数量;n为宇宙数量。
合理设置通识教育内容,强化动漫学生艺术修养的培养,能有效改善动漫专业存在的问题。动漫专业通识教育内容,除了体育、心理健康教育、英语、计算机应用等课程之外,可以增加以下内容:
(3)

(4)
1.4 数学形态学
数学形态学是基于集合论方法发展而来的一种图像处理方法[11],包括腐蚀、膨胀、开、闭、击中、击不中等。令A为二值图像,S为结构元素。
膨胀定义为:
(5)
腐蚀定义为:
(6)
开运算定义为:
A·S=(A⊖S)⊕S
(7)
闭运算定义为:
A·S=(A⊕S)⊖S
(8)
2 林区道路图像检测
针对林区道路图像,本文选取林区弯曲道路和直路图像进行检测。主要包括彩色图像灰度化、多元宇宙阈优化阈值计算、数学形态学处理等环节。本试验的硬件环境如下:ASUS-S4200,处理器 Intel(R)Core(TM)i5-8250HQ CPU@1.60GHz,RAM为8.00GB,64位操作系统;软件环境为:Windows 10 家庭中文版,编程语言为Matlab2017a,采用其中的图像处理工具箱。本文选取弯路图像和直路彩图各一张,如图2所示,上排为彩色原图,下排为超像素聚类计算获得的像素值,采用简单迭代聚类算法计算[12],获得每个超像素的平均RGB数值。
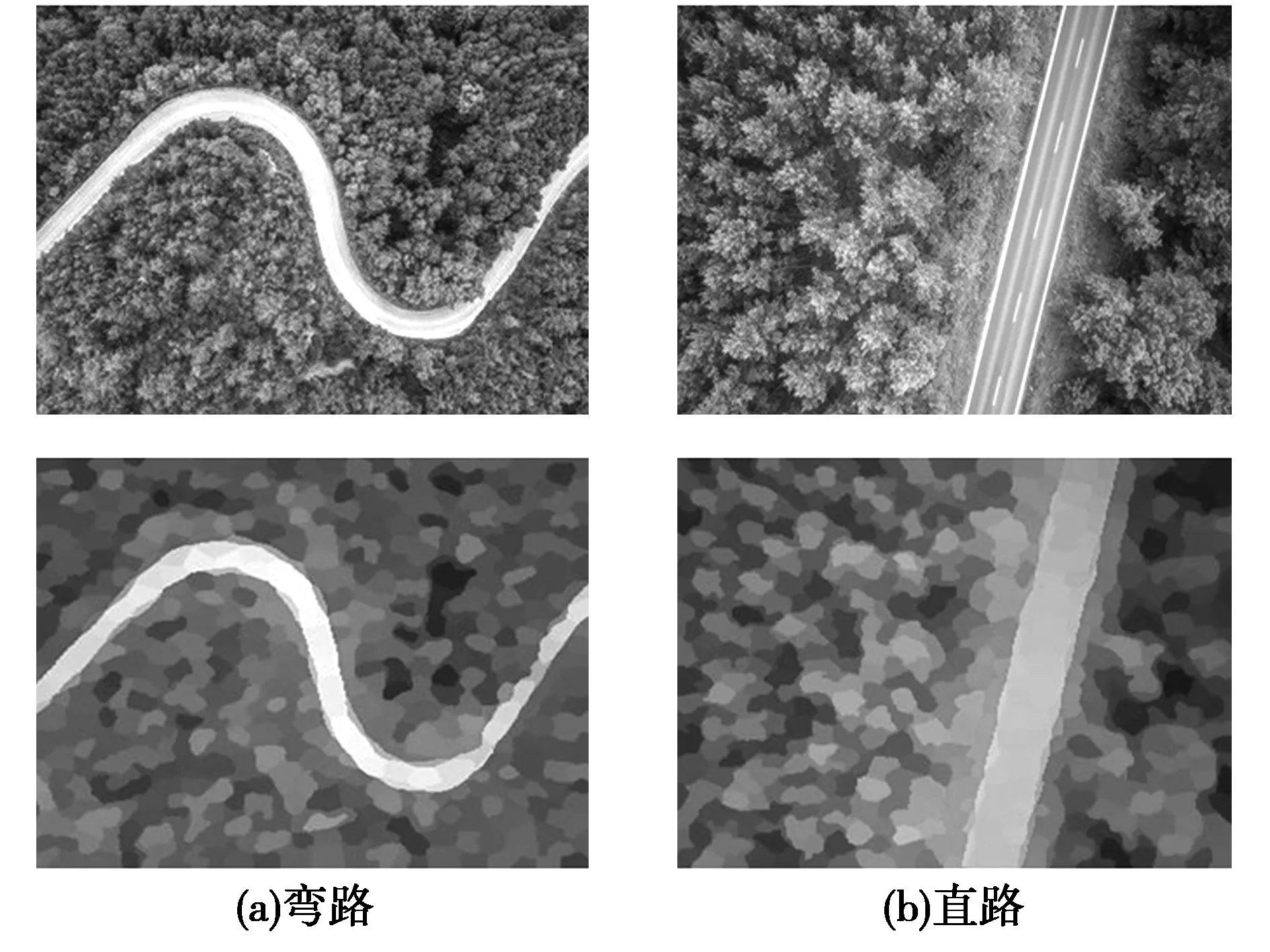
图2 样本图
2.1 灰度化
实现林间道路检测需要提取道路在森林中的位置,降低树木和杂草对道路的影响。由于道路与森林颜色的差异较为明显,可以利用颜色特征来进行像素级区分。采用式(1)对彩图2进行灰度化得到灰度图,如图3所示。有部分道路被高大的林木所遮挡,导致道路不完整。部分阳光反射强烈,反光部分和道路像素值接近,变成了背景噪声[13]。
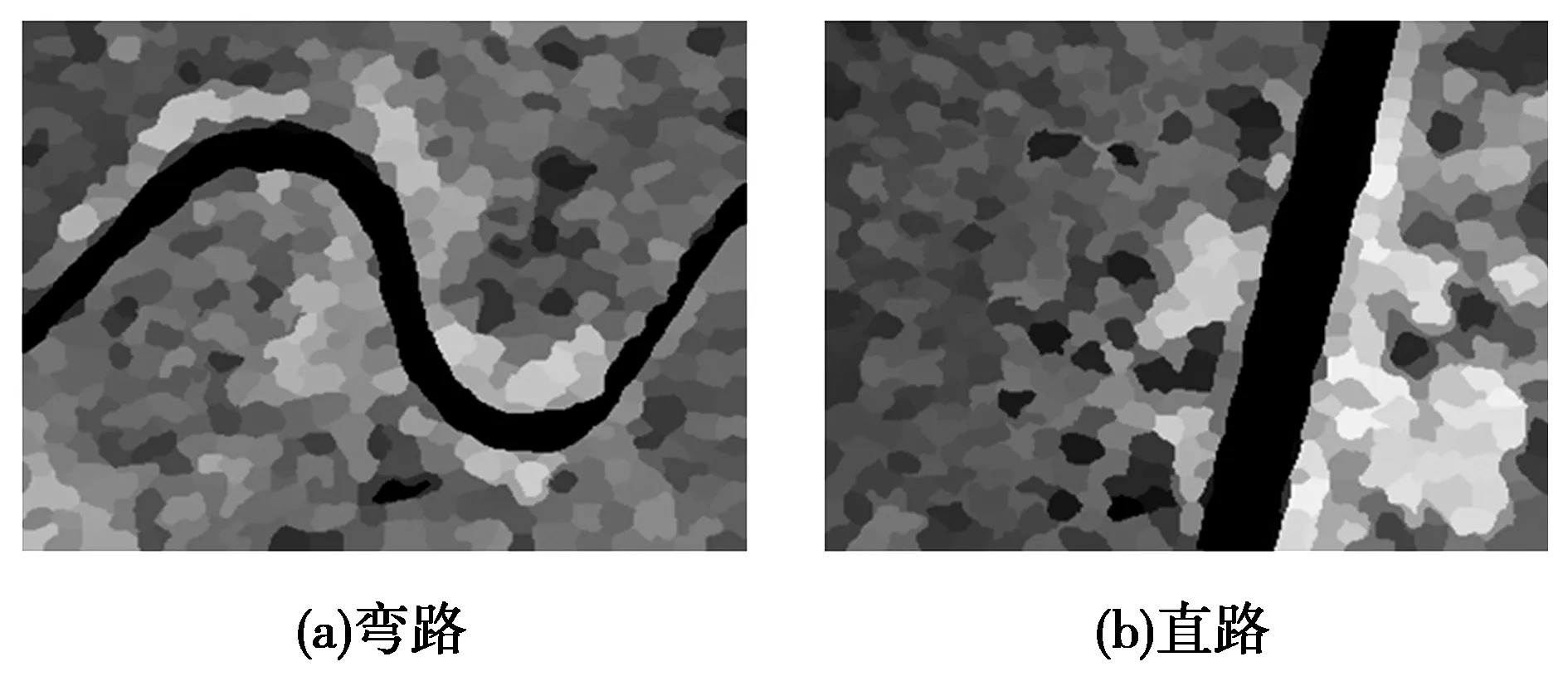
图3 2G-R-B图
2.2 多元宇宙优化阈值计算
MVO算法优化过程从创建一组随机宇宙开始。在每次迭代中,具有高通胀率宇宙中的物体倾向于通过白/黑洞移动到具有低通胀率的宇宙。与此同时,每一个单独的宇宙都面临着通过虫洞在其物体中随机传送到最好宇宙的过程,迭代到满足一个标准为止时终止此过程。最好的宇宙通过计算目标函数的值来判定,选用何种目标函数式是MVO的关键[14]。本文选用三种目标函数,分别为Kapur、Otsu、Yen,利用MVO优化计算后进行阈值分割,得到分割结果,如图4所示。
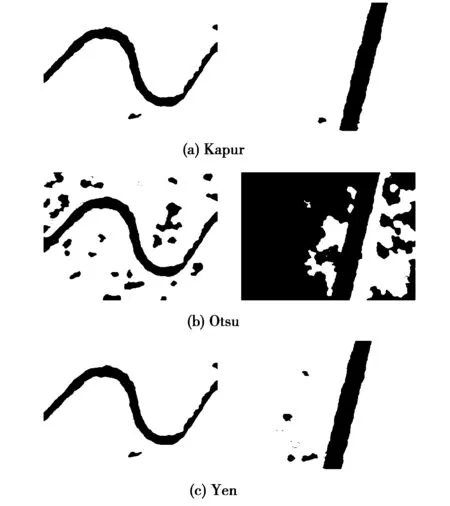
图4 阈值分割结果
Kapur:
Topt=arg max[Hf(T)+Hb(T)]
(9)
(10)
(11)
Otsu:
σ2(t)=w0(t)(u0-ut)2+w1(t)(u1-ut)2
(12)
Yen:
Topt=arg max[Cb(T)+Cj(T)]
(13)
(14)
(15)
2.3 数学形态学处理
从图4可以看出,Kapur的分割效果最好。对图4(a)求取最大连通区域,去掉噪声,得到道路主体轮廓图,如图5(a)所示。数学形态学腐蚀和膨胀处理得到最终分割图[15],如图5(b)所示,采用线结构元素。
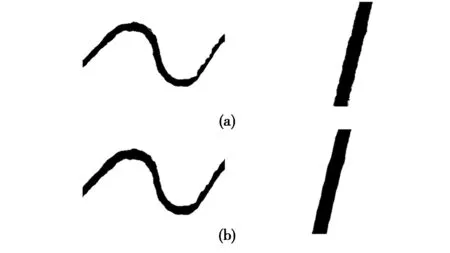
图5 道路主体轮廓
3 结果分析
为了准确评价图像分割质量,采用有监督客观评价方法,人工分割出理想目标,如图6所示,并将此作为基准,定义标准目标图像和分割图像分别为Igold-truth、Isegmented。
相似度为:
(16)
正确率为:
(17)
则错分率为:
(18)
漏分率为:
(19)
利用式(16)~(19)对图5进行计算,数值结果SD、Dice、ER、NR弯路数值分别为78.19%、87.76%、25.46%、1.90%,直路数值分别为95.93%、97.92%、3.82%、0.41%。综合而言,提出的多元宇宙优化阈值算法能够提取林间道路目标。
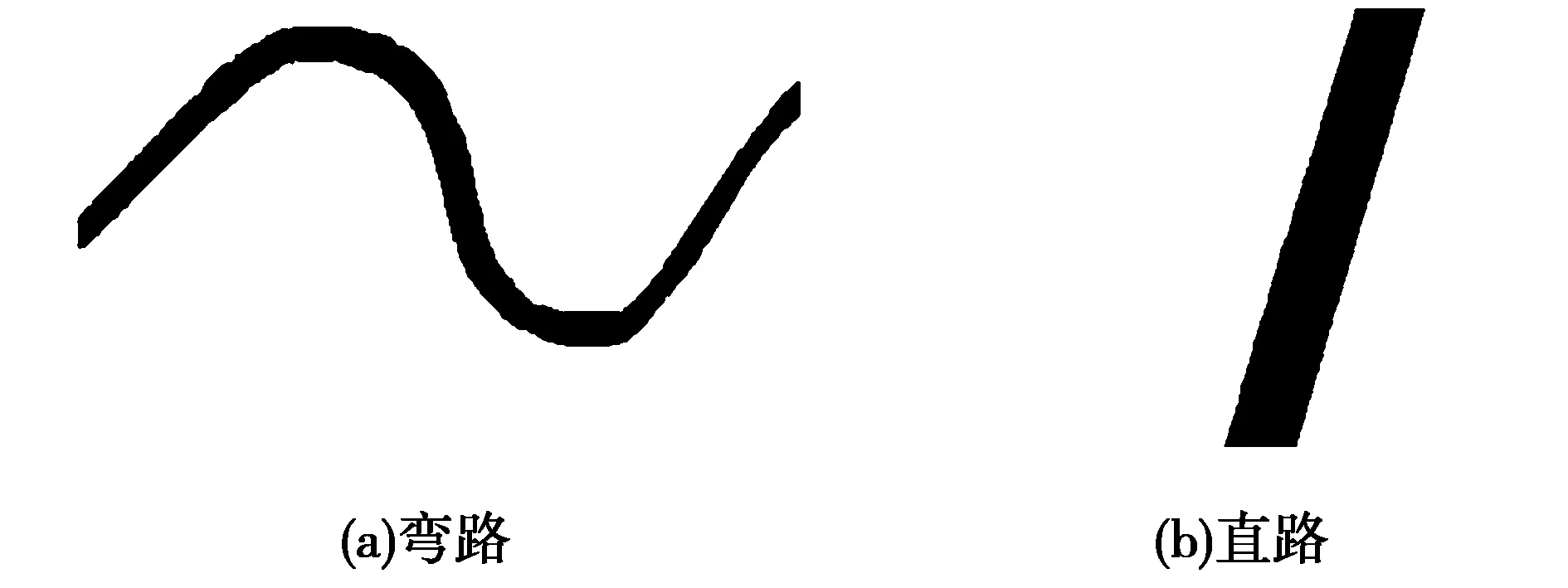
图6 道路分割
4 小结
(1)将多元宇宙优化算法与Kapur阈值算法相融合,快速迭代,实现林间道路目标提取,采用数学形态学运算,利用线结构元素去除部分噪声,具有较强的目标定位能力。
(2)采用超像素均值与超绿色灰度化算法实现彩图灰度化,有利于噪声对目标的干扰,多元宇宙优化用于林间道路图像检测是可行的,能够有效地实现林间道路提取。
(3)选取合适的目标函数作为多元宇宙优化适应度标准是影响分割质量好坏的关键。图像采集过程中存在树木对道路的遮挡和强光反射,降低了图像分割效果,需要在后续研究中改进。
