基于STM32微处理器的空气波压力的外周循环不良治疗系统设计
2020-02-24胡海洋陈月明叶继伦项勇文斌王业磊
胡海洋,陈月明,叶继伦,项勇,文斌,王业磊
1 安徽医科大学 生物医学工程学院,合肥市,230032
2 深圳大学 医学院 生物医学工程系,深圳市,518060
0 引言
下肢深静脉血栓(Deep Venous Thrombosis,DVT)是骨科大手术中发病率较高的并发症,严重的话能够导致肺栓塞,危及患者生命。同时,DVT具有不易诊断的特点,因此预防重于治疗。单纯的药物预防治疗会留下副作用,因此较为安全有效的物理器械疗法得到了青睐。临床研究表明,采用分级加压弹力袜和间歇式加压治疗的物理方法,对病人的下肢进行治疗以及预防DVT有着显著的效果。本文介绍的间歇性空气加压装置采用以STM32系列单片机作为系统核心,包括压力传感器、气泵、电磁阀和多气腔等组成的气动装置与空气压输出系统,以及可编程的治疗模式,基本实现了对DVT的预防作用。
1 间歇性加压治疗原理与设计方案
1.1 间歇性加压治疗原理
深静脉血栓的形成主要是由于血液在静脉中的不正常凝结,造成表皮细胞缺失养分而死亡,严重者会出现下肢表皮坏死、溃疡、溃烂等症状。间歇性加压装置通过加压气囊压迫病人下肢,改善血液循坏,周围毛细血管回流增加,循环阻力下降,增强末梢组织的循环,改善末梢组织的供血和供氧情况,促进末梢的代谢功能,提高网状内皮细胞的吞噬能力,有助于对渗出液的吸收和对病理性产物的排泄,从而达到有效预防并辅助治疗深静脉血栓的目的[1]。
1.2 系统整体方案
本研究提出的空气波压力治疗系统硬件方面主要由控制电路和气动装置组成[2]。控制电路中,由STM32F103RCT6控制气动装置的工作以及信号的采集和处理。气动装置由单片机控制产生相应的压力直接作用于患者,并采集气囊内的压力数据反馈给单片机。间歇性加压装置系统功能框图,如图1所示。系统硬件实物图,如图2所示。
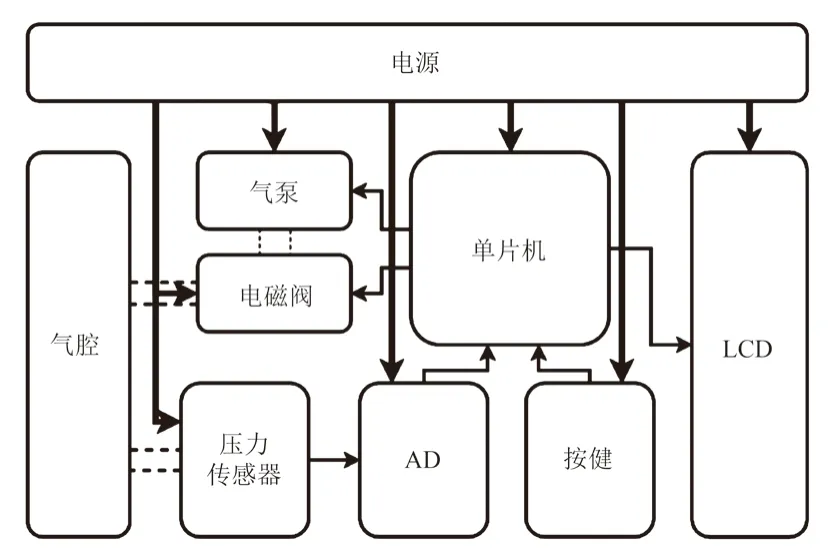
图1 间歇性加压装置系统功能框图Fig.1 Functional block diagram of intermittent pressurization device system
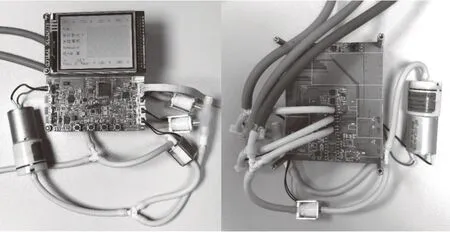
图2 系统硬件实物图Fig.2 Physical diagram of system hardware
1.3 气动装置组成
气动装置主要由气泵、电磁阀、气囊、压力传感器组成[3]。气泵和电磁阀由单片机经驱动电路直接控制,完成相应的充放气的过程。气囊用于产生压力。压力传感器采集气囊内的压力数据,经放大电路、AD转换后送入单片机,用以反馈控制充气状态和过压保护。间歇性加压装置气路系统,如图3所示。
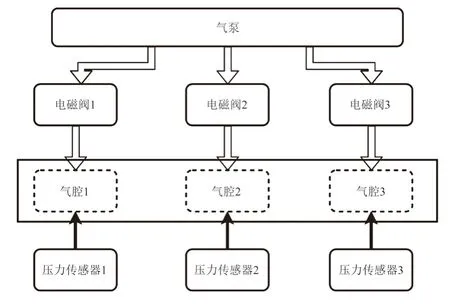
图3 间歇性加压装置气路系统Fig.3 Pneumatic system of intermittent pressurization device
2 系统硬件设计
2.1 电源部分
系统采用直流+12 V稳压供电,通过电压调整电路转换为所需的+6 V、+5 V和+3.3 V。其中,为了防止气泵、电磁阀等气路元件工作时的电源波动对系统其他元器件产生影响,系统通过两个DC-DC元件转换出两路+6 V电压,分别供给气路系统和控制系统。
2.2 泵、阀驱动电路
系统中气泵和电磁阀采用简单的三极管驱动电路驱动,如图4所示。当单片机I/O口输出高电平时,三极管导通,泵、阀工作。当I/O口输出低电平时,三极管不导通。图4中续流二极管作用是为泵、阀断电后所形成的的感生电动势提供回路,保护三极管、泵和电磁阀。
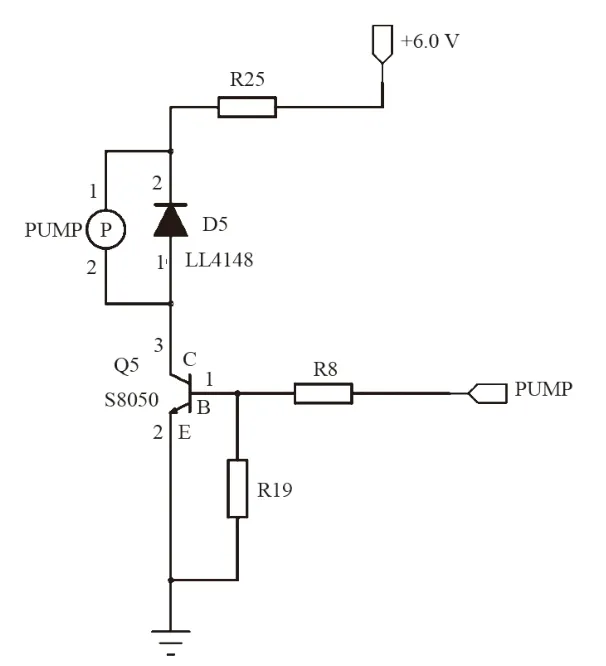
图4 气泵、电磁阀驱动电路Fig.4 Air pump,solenoid valve drive circuit
2.3 压力信号采集电路
气腔压力采集的准确性保证了系统对充、放气过程的准确控制。压力传感器采用台湾Unisense公司生产的US9111-006S,最大测量压力为5.8 psi(1psi=6.89 kPa)。压力采集与放大电路如图5所示,这里R81=100 kΩ,R82=1 kΩ,计算得出放大增益为101倍。AD转换芯片选用8通道、12位的ADC128S022,其与单片机通过SPI进行通讯,AD转换部分电路如图6所示。
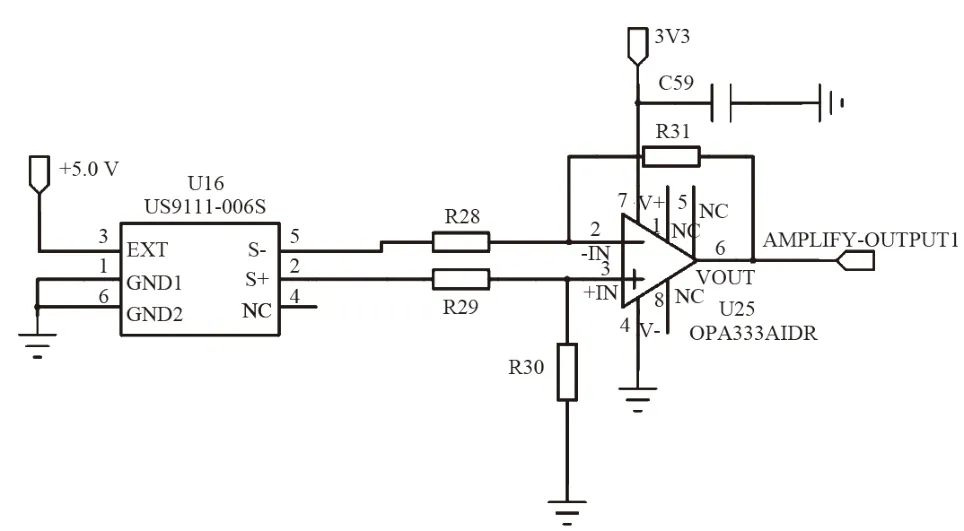
图5 压力采集与放大电路Fig.5 Pressure capture and amplifying circuit
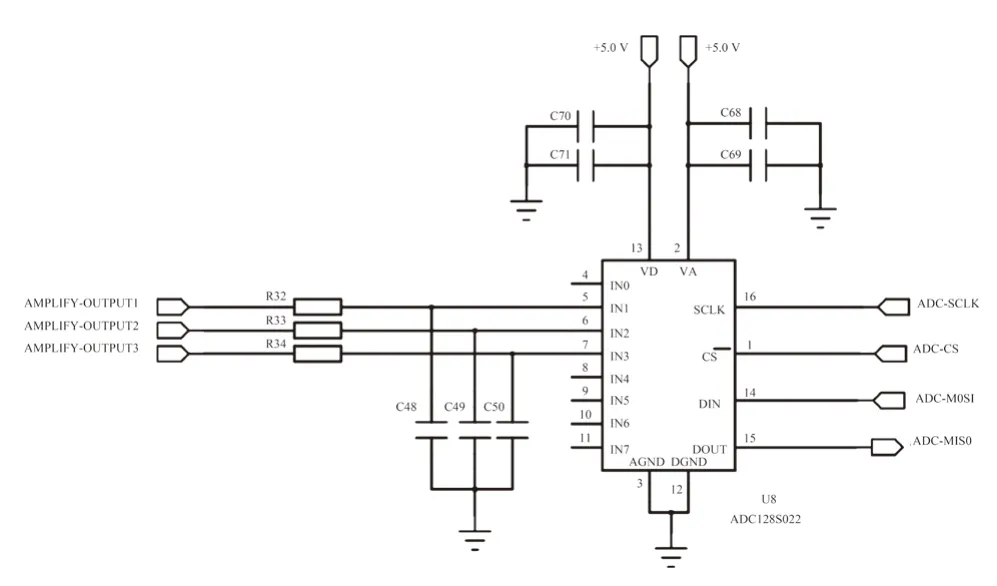
图6 基于ADC128S022的AD转换电路Fig.6 AD conversion circuit based on ADC128S022
3 系统软件设计
3.1 系统工作主流程
系统主要工作流程如图7所示。系统开机后,初始化串口、外部中断、定时器等硬件模块,之后等待系统的工作模式、工作强度和工作时间等工作参数的设置[4]。系统工作环境设置完毕后,待启动键按下,系统按照设定的模式运行,直到触发定时器中断关闭系统[5]。
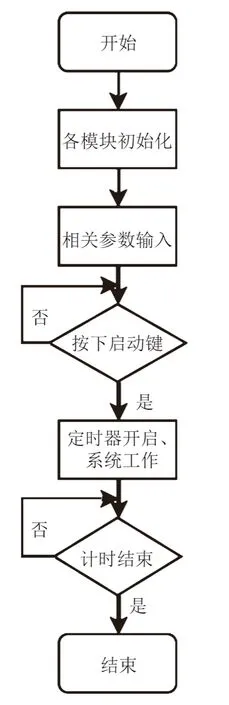
图7 治疗系统软件流程图Fig.7 Software flow chart of treatment system
3.2 气动装置工作流程
气动装置的工作模式有两种,包括单腔模式和多腔模式。其中,单腔模式是指三节气腔依次充气、泄气,如图8所示;多腔模式是指三节气腔依次充气,再同时泄气,如图9所示。

图8 单腔模式工作示意图Fig.8 Schematic diagram of single cavity mode operation

图9 多腔模式工作示意图Fig.9 Schematic diagram of multi-cavity mode operation
系统的工作强度以系统正常工作时气腔的最大压力值分为弱、中、强三档,分别对应30 mmHg、40 mmHg和50 mmHg(1 mmHg=133.32 Pa)。气泵和电磁阀的工作状态来源于各气腔压力值的反馈,若气腔内的压力值达到预设压力,系统则停止对相应气腔充气。
单腔模式和多腔模式的具体工作流程如图10、图11所示。
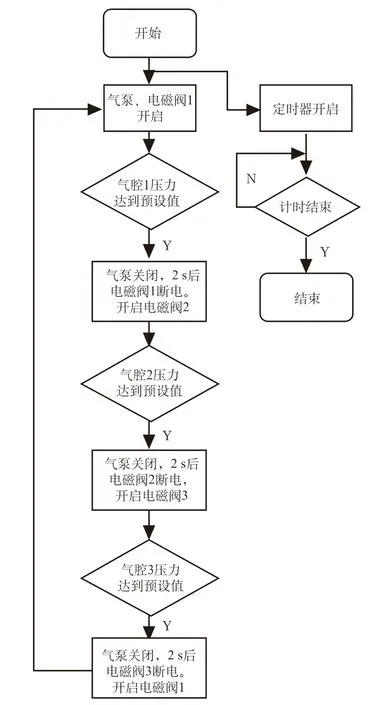
图10 单腔模式工作流程Fig.10 Workflow of single chamber mode
4 系统测试与结果
系统测试分为两个部分,首先是对硬件系统进行测试,包括压力测试和充、放气速率测试,以此评估系统的可靠性。之后对系统的控制功能进行测试,即通过对各气腔压力值变化的分析,验证系统的功能性。系统测试环境如图12所示。
4.1 硬件系统测试
4.1.1 压力测试
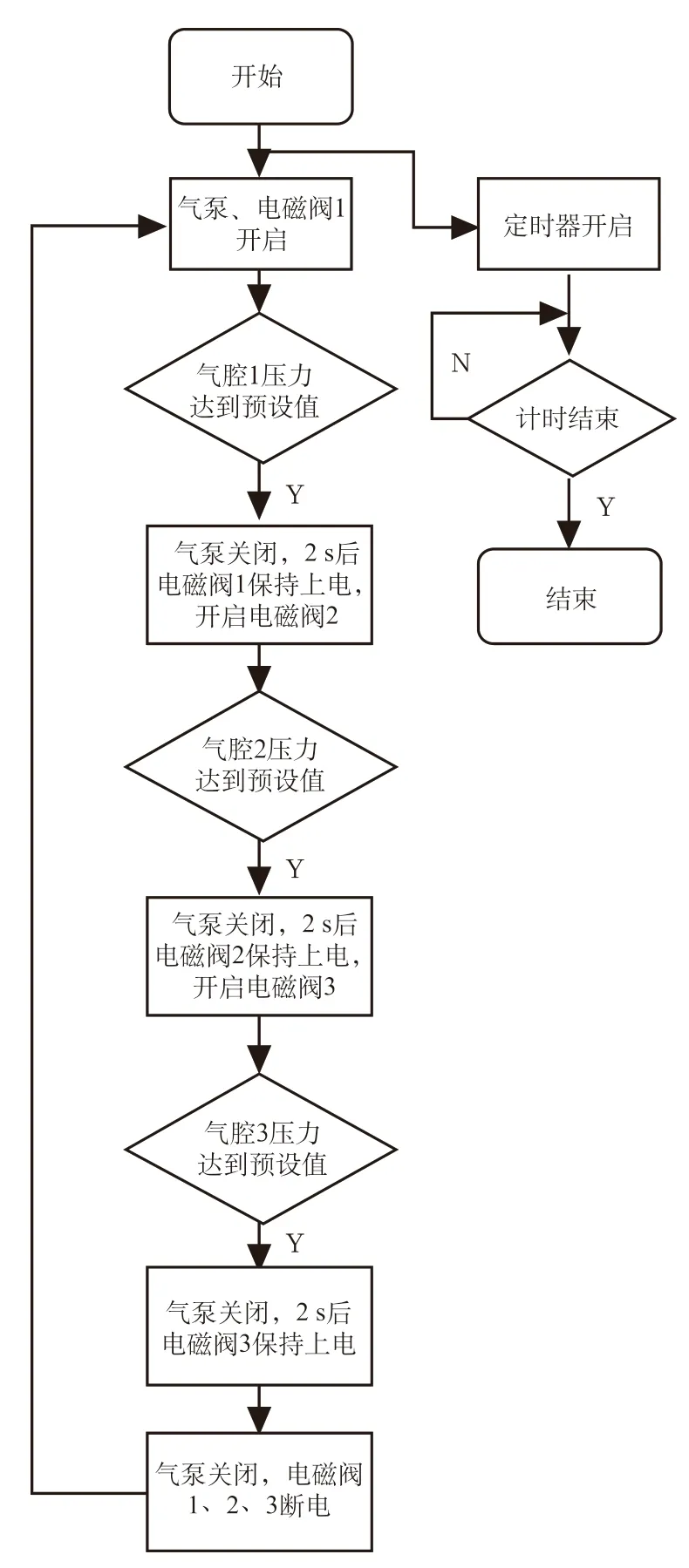
图11 多腔模式工作流程Fig.11 Workflow of multi-cavity mode
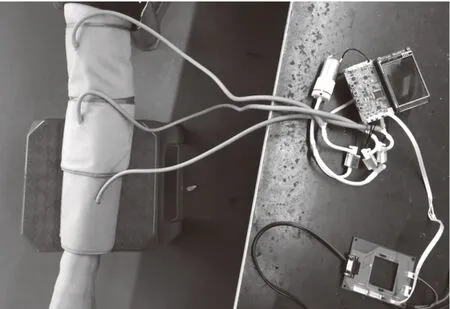
图12 系统连接示意图Fig.12 Schematic diagram of system connection
测试系统在不同工作强度下,气腔处于保持阶段时的压力值与预设压力值之间的误差。测试方法是将精密压力计接入到气路中,记录气压保持阶段的气压值,数据如表1所示。
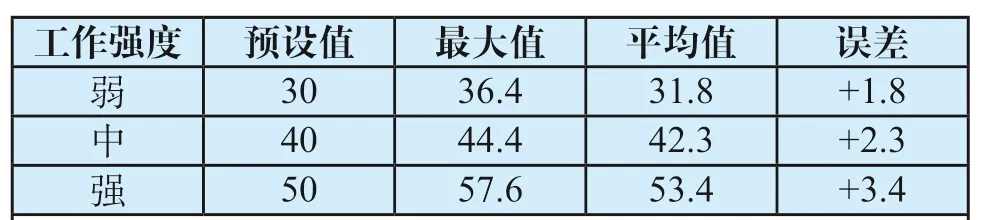
表1 不同工作强度下气腔压力值(mmHg)Tab.1 Pressure value of air chamber under different working intensity
根据表1的数据,系统在正常工作时,气腔的压力会在停止充气的瞬间得到一个最大值,待稳定后,气腔压力能够保持在预设值附近。
4.1.2 充、放气速率测试
测试系统在不同工作强度下,充、放气的平均速率。充气时间表示气腔压力从0充气至目标压力所用时间,放气时间表示气腔压力从目标压力降至10 mmHg以下所用的时间,具体如表2所示。
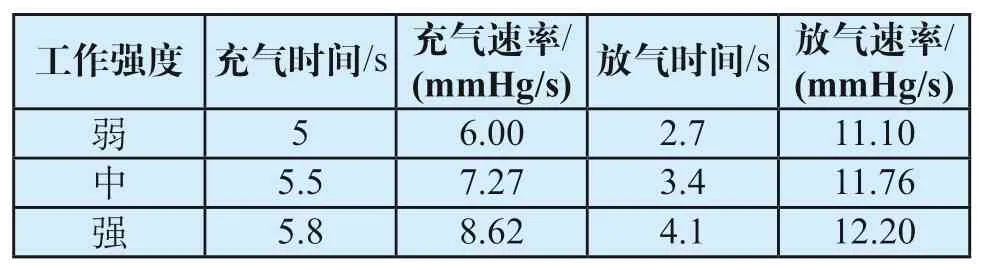
表2 系统不同模式下的充放气速率Tab.2 Charging and discharging rates in different modes of the system
4.2 控制系统测试
设置系统的工作模式为单腔模式,工作强度为中,工作时间为2 min。利用串口输出气腔的压力值,并利用Matlab拟合工具模拟各气腔压力值随时间变化的趋势图,如图13和图14所示。
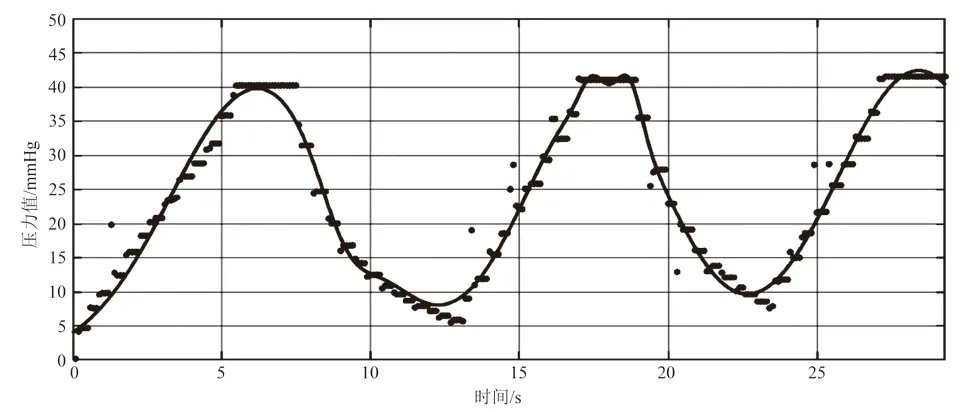
图13 1号气腔压力变化拟合图Fig.13 Fitting diagram of pressure change in No.1 air chamber
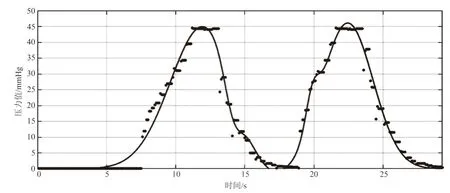
图14 2号气腔压力变化拟合图Fig.14 Fitting diagram of pressure change in No.2 air chamber
由图13和图14可以看出,各气腔内的气压在系统开启后开始交替上升,分别在达到预设值后保持2 s再放气。实验验证了设计方案的可行性,初步实现了间歇性加压装置的基本功能。
5 总结
本研究以STM32F103RCT6为核心,利用了其丰富的外设功能控制各气腔的循环充气过程,并辅以压力监测保证系统的正常运行及安全性要求,测试结果表明上述系统能基本满足日常生活中对下肢深静脉血栓的预防要求。后续可以进一步丰富系统的工作模式,如:压力波动模式,循环方式等,再通过增加气腔的数量和形状,满足人体下肢、上肢等不同部位加压理疗的应用需求,使得上述的应用系统更具有灵活性和扩展性,未来在应用系统设计中可以考虑用户的感受,对于相关参数提供可调的设置功能,以及增加多模式显示的方式,供实际设计时参考。
