基于模糊控制算法与4G-LTE的植物工厂远程监控系统设计
2020-02-22刘新宇陈东雷张鑫蒋伟周凯叶腾
刘新宇 陈东雷 张鑫 蒋伟 周凯 叶腾
摘要:为解决在植物生长过程中的最优环境自动控制与远程监控等问题,设计了一种植物工厂系统。该系统通过传感器采集环境参数,通过单片机控制执行模块,通过4G-LTE模块经云服务器在单片机与客户端之间实现数据传输,并使用LabVIEW软件与易安卓软件分别设计了电脑与手机客户端。采用了矩阵算法与模糊控制算法将输入环境参数进行模糊化,确认了环境参数优先级,并查询规则库以采取不同的执行措施。通过制作实物模型并对系统进行了48 h测试,证实该系统可以实现数据的实时采集并传输到软件端显示,可自动调节环境参数或在电脑端与手机APP中手动调节。
关键词:自动控制; 远程通信; 单片机; 模糊控制算法; 4G-LTE; LabVIEW
中图分类号: TP273.4 文献标志码: A 文章编号:1002-1302(2020)23-0220-07
现代信息技术飞速发展,而利用互联网技术与自动控制技术来实现农业信息化与智能化已成为未来农业的发展趋势[1]。植物工厂系统智能化程度高,可节约大量人力与物资,已成为当前热门的农业智能化设备。张强等设计了基于S3C6410的LED植物工厂视频监控系统,可实现植物工厂实时视频监测[2];魏轶凡等将家用微型植物工厂划分为若干子系统分别进行设计,并进行了生菜栽培试验[3];张样平等研究了日光型植物工厂绿叶蔬菜轨道式高效栽培,并做了效益分析,证实这是一种推广性很高的栽培方式[4]。
光照、温度、湿度、CO2浓度等是影响植物生长的主要环境变量,并且随时受外部因素的干扰,因此很难维持在植物所需的理想状态[5]。植物工厂可保证作物生长的最佳环境,实现快速稳定生产,并且可以应用于细胞工程、基因工程等农业高科技领域[6],提供种子培育所需的严格环境。
本研究设计的植物工厂系统,采用单片机作为主控模块,各种传感器用于采集环境数据,通过模糊控制算法将输入数据模糊化[7],经过模糊推理系统确定适合的执行措施,并采用RS 485通信接口与 4G-LTE DTU进行远程通信。同时,本研究制作了实物模型并进行测试,以验证本系统是否可以长时间维持适宜的植物生长环境,是否可在电脑端与手机端显示环境参数,并手动下达指令。
1 系统总体设计方案
1.1 整体结构
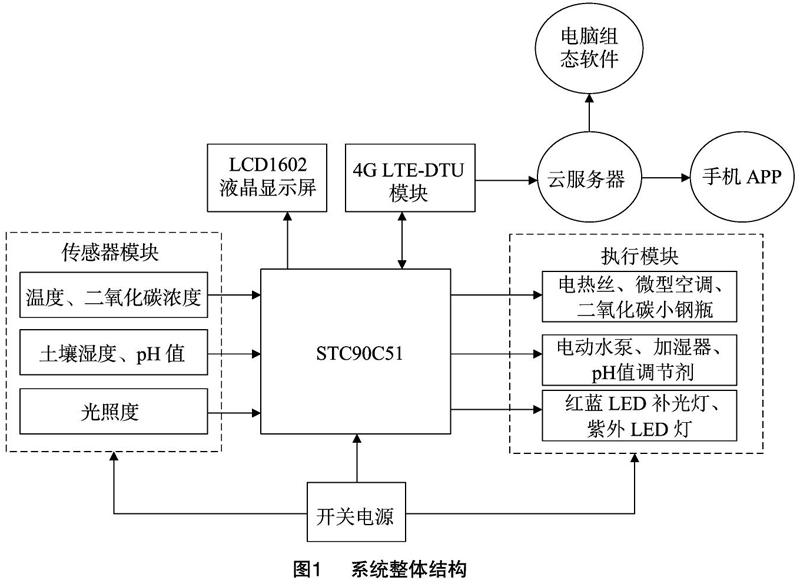
如图1所示,植物工厂系统主要由传感器模块、主控模块、执行模块、通信模块与客户端模块组成。传感器模块可以准确地采集植物周边生长环境的温度、CO2浓度、土壤湿度、pH值、光照度等参数。主控模块STC90C51单片机是控制功能的核心,可收集传感器采集的数据,通过算法得出参数值及控制要求,既可自动控制执行模块改变环境,也可接收用户指令进行控制。执行模块则由电热丝、微型空调、CO2小钢瓶、水泵、加湿器、pH值调节剂、红蓝LED补光灯等组成。通信模块选择4G-LTE设备,将数据传送到云服务器,并进一步发送到用户的电脑或手机端,同时接收用户的操作指令;结合表1可知,目前仅有4G技术可以较好地实现无距离限制数据传输。在客户端模块中,电脑端采用组态软件进行编程,手机端采用易安卓进行APP开发,设计各自的用户操作界面。
1.2 运行过程分析
系统运行过程如下:传感器实时感测周边环境数据,并将模拟信号/数字信号传送到单片机内部,由模糊控制算法生成被控参数值并显示在LCD液晶显示屏上,单片机再根据设定好的环境参数值进行偏差判断,进而控制执行模块;其中,红蓝LED补光灯、水泵、电热丝、微型空调、CO2小钢瓶等设备的通断都通过对继电器的控制来完成。单片机与 4G-LTE 模塊采用RS 485串口方式进行连接,实时进行数据输出与输入,4G LTE-DTU模块通过无线串口软件进行调试,可将数据上传至服务器储存,再在电脑端通过组态软件获取服务器数据。前面板设计了显示部分与控制部分,显示部分将服务及接收的数据进行显示,控制部分可接受用户指令,再通过服务器与4G LTE-DTU将指令传回单片机。
2 实物模型开发
通过制作微型植物工厂的实物模型,初步验证其中环境参数控制过程的可行性,以及利用4G模块进行远程通信的效果。
2.1 硬件选择
主控模块:考虑到经济性与适用性,采用STC90C51作为控制核心,在此基础上配制16位定时器。设置8个中断源、32个通用输入/输出(I/O)端口。选择工作电压为5 V,并连接外部电路。
传感器模块:该实物模型可检测3种环境参数。采用DS18B20温度传感器检测环境温度,测量范围-55~125 ℃,精度为±0.5 ℃,以“一线总线”方式传输数字信号;采用YL-69土壤湿度传感器与LM393比较器芯片检测土壤湿度;采用内置BH1750芯片的数字光强度传感器检测光照度,检测范围0~65 535 lx,信号为数字量直出。
4G-LTE DTU模块:选用COMWAY公司的WL-4010 4G-LTE DTU,此模块支持七网通信制式以及COMWAY协议,具备网口与串口同时通信能力及虚拟服务器功能。
执行模块:采用了电热丝对环境进行加热,模拟简单的控温过程;采用小型水泵进行浇水,模拟喷灌过程;采用红、蓝2种LED灯串实现对环境的补光过程。3种装置均使用同一5 V四路继电器控制通断。
2.2 软件开发
编程软件:采用KEIL软件对单片机进行编程。如图2所示,以模块化编程为原则,将传感器检测、LCD液晶屏显示、总线、串口通信等功能分别编为不同的子程序与子函数,再汇总到主函数中执行,提高了程序的可读性与操作性。
通信软件:采用COMWAY公司无线串口软件接收4G模块数据并保存,同时实现连接云端数据库功能(图3)。在电脑端采用LabVIEW组态软件进行监控面板的编程与设计,可接收数据与发送指令;采用易安卓软件进行手机APP的开发,此APP同样可以从云服务器中获取数据显示在面板上,并可以发送指令。
3 模糊控制算法分析
在实物模型可以精确采集并传输数据的基础上,为了确保对环境参数的控制精度,采用模糊控制的思想进行系统算法的设计,此方法既可以完善实物模型,实现相应功能,又可以为植物工厂的设计方案提供参考。
3.1 模糊理论
模糊理论是模糊控制算法的基础,其工作原理如下:不同传感器测量的准确参数通过转换,成为可用于模糊运算的模糊量,再通过模糊控制器运算,最后将得到的模糊量结果转换成精确量,进而控制各种执行单位。模糊控制可分为模糊化、规则建立、模糊推理、去模糊化四步来执行[8](图4)。
3.2 执行模块优先级的评价
在实物模型中,模糊控制系统的输入值即为3种不同传感器检测到的环境参数与植物适宜生长参数之间的偏差;而为了确定各执行模块指令的时间,则需要对3种执行模块的动作优先级进行确认,以确认模糊控制系统的输出值。故采用层次分析法[9]进行优先级确认,分如下2步进行:
第1步:输入值优先级确定。本研究选择辣椒作为试验对象,对实物模型中3种环境参数做出了重要性评价(表2),并由此得出比较矩阵A,即式(1)。
求出矩阵A的最大特征值对应的标准化特征向量I,如式(2)所示,此向量反映了输入值优先级。
第二步:执行模块对输入值的优先级确定。依照笔者所在的研究团队的建议,对各执行模块对输入值的重要性做了评价(表3),进一步得出不同执行模块对3种输入值的比较矩阵,分别求出对应的权向量I1、I2、I3及组合权向量Q,最后与输入值优先级权向量I结合得出各执行模块的优先级评价。
根据表3可得到执行模块对温度的重要程度比较矩阵A1,即式(3),并由此得到其最大特征值对应的标准化特征向量I1,即式(4)。同理可得执行模块对湿度与光强的权向量I2、I3,从而得到组合权向量Q,即式(5),结合输入值优先级权向量I得到最终的执行模块的优先度矩阵(6),加热、浇水、补光的优先级系数分别为 0.501 7、0.383 6、0.114 6。此优先级列表,可以为模糊控制系统规则制定提供参考。
3.3 参数的模糊化
3.3.1 规则设计 根据3种环境参数对辣椒生长的影响程度,将它们各分成5个等级,即负大、负中、中、正中、正大;而模糊控制系统中3种执行模块输出的执行程度也设为5个等级[10]。根据笔者所在研究团队的建议及相关资料[11],温室中辣椒生长过程中的最适参数如表4所示,以此对输入数值进行模糊化。
环境参数由精确输入值转化为模糊控制值应通过量化函数来实现,求得量化函数的规则如下:将精确输入参数与最适值的差值除以量化因子K,便得到量化函数。
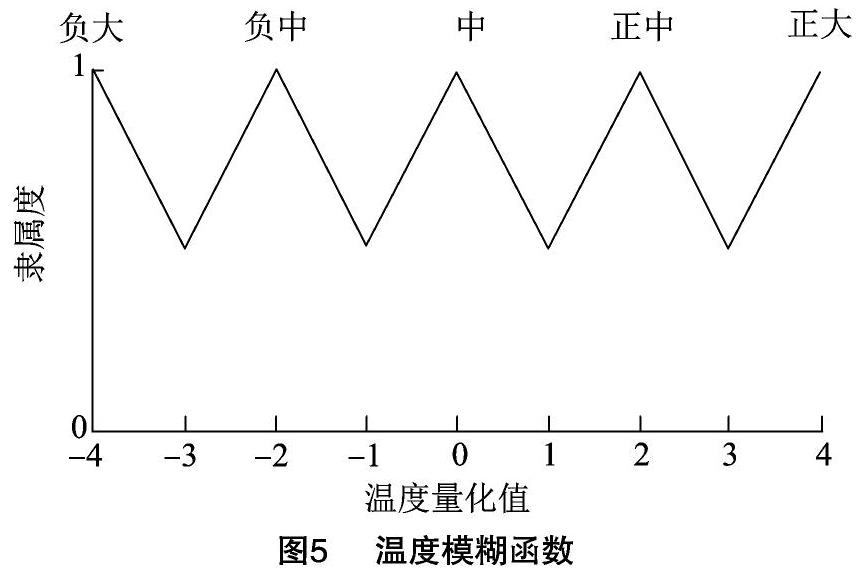
3.3.2 输入参数模糊化 以辣椒生长期的温度为示例进行模糊化过程的分析:当生长期温度为 20~30 ℃时,用模糊值“中”来表示,温度在10~20 ℃ 间时,则用“负中”表示更为合理,温度低于 10 ℃ 则为“负大”,温度为30~40 ℃则为“正中”,高于 40 ℃ 用“正大”表示。由此可将温度量化函数以 Y=(X-25)/5来表示,X为温度值,Y为量化输出,温度便被量化在-4~4的范围内,结合输入参数与模型复杂程度,确定温度模糊函数图(图5)。
利用上述方法,结合传感器的测量范围与湿度、光照度的最适参数,将辣椒生长期的湿度与光强也用量化函数来表示。土壤湿度通常为 20%~80%,则量化函数为Y=(X-50)/7.5,X为湿度值,Y为量化输出,湿度同样被量化到-4~4的范圍;光照度的量化函数为Y=(X-25 000)/6 250,X为光照度,Y为量化输出,光照度也被量化到-4~4的范围内,三者函数图相同,在此不进一步展开。
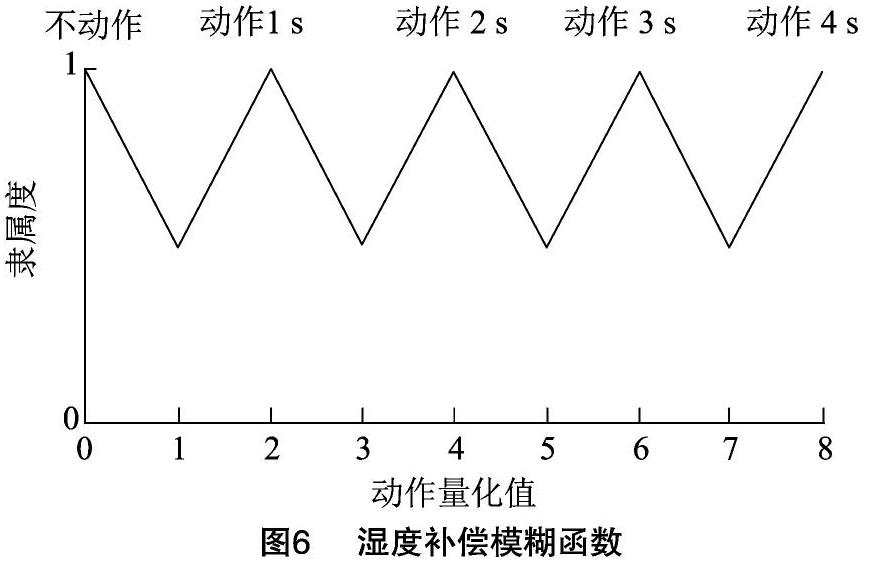
3.3.3 输出参数模糊化 以湿度补偿模块为示例,结合上文的分析方法来进行输出参数的模糊化:首先将水泵的执行动作分为5个等级,分别是不动作、动作1秒、动作2秒、动作3秒、动作4秒,并将量化区间设置在0~8之间;选取与输入同样的函数模型,得到湿度补偿模糊函数图(图6)。
3.4 总结
上述模糊控制方法,将3种环境参数的精确输入值分别量化为5个等级,共建立了辣椒生长的125种环境情况,并与相应125种执行动作一一对应,建立了包含125条规则的规则库;在单片机执行模糊推理过程时,首先将采集到的3种环境参数代入模糊函数中进行量化,再查询规则库进行动作匹配,最后得出相应的执行动作。
4 测试结果
4.1 控制组件测试
首先将传感器模块、STC90C51单片机与执行模块组成的控制系统连接,测试系统的数据采集与显示功能以及自动控制执行模块的功能是否完善,部分结果如图7所示,结果表明,液晶屏可以随时显示周边环境参数,并且执行模块可以在达到设定阈值时自动动作。
4.2 通信测试
在通信测试中,采用将单片机通过RS485串口连接到4G-LTE DTU的方式实现数据传输,并在电脑端通过COMWAY无线串口助手接收数据,在手机端通过web服务器获取云端数据,结果表明,软件可以实现实时接收单片机数据,并通过中断传回操作指令的功能。在电脑端通过LabVIEW页面显示各种参数,如图8所示,并设计了手机APP以提供更加灵活的服务,如图9所示。
4.3 系统整体试验测试
为了验证实物模型能否初步实现维持植物适宜的生长环境的功能,本研究选择了在江苏省扬州市9月的某2 d对系统进行了连续48 h的测试。将系统的控制组件与通信设备全部进行组合,选择全程录像的方式对LCD1602液晶屏上的传感器数据进行记录,并且每隔30 min采集1次环境参数,分别将温度、土壤湿度、光照度数据制成折线图(图10),可知辣椒生长环境得到了极大的改善,试验全程基本处于适宜的生长环境中。
测试时,由于光照度会变化,为了防止系统在亮度低于阈值打开LED灯时又瞬间检测到亮度高于阈值,从而执行反复亮暗的错误动作,对补光阈值设定采用了滞回曲线的形式;同时,考虑到植物的生物特性,在温度高于27 ℃时,浇水动作将被禁止,以防止植物受到损伤。
5 结论
基于STC90C51单片机与4G-LTE DTU模块设计出的可远程监控植物工厂系统,采用模糊控制的思想处理收集到的环境参数,并自动控制周边环境,利用RS485无线串口通信与云服务器实现单片机与电脑、手机端的数据传输。为了初步验证系统设计的可行性,制作了实物模型并成功实现自动控制与远程通信功能,经过48 h的数据测试,表明实物模型可以基本实现维持植物生长环境稳定的功能。此设计顺应了农业现代化与信息化的趋势,对于智能农业设备的设计与制造具有一定的参考价值。
参考文献:
[1]徐海斌,王鸿翔,杨晓琳,等. 现代农业中物联网应用现状与展望[J]. 江苏农业科学,2013,41(5):398-400.
[2]张 强,田海涛,张浩伟. 基于S3C6410的LED植物工厂视频监控系统设计与实现[J]. 中国照明电器,2019 (5):15-20.
[3]魏轶凡,毛罕平,左志宇,等. 家用微型植物工厂结构设计与生菜栽培试验[J]. 農机化研究,2019,41(11):98-103.
[4]张样平,常丽英,黄丹枫,等. 日光型植物工厂绿叶蔬菜轨道式高效栽培与效益分析[J]. 中国蔬菜,2019(9):89-92.
[5]徐少承. 嵌入式植物工厂智能监控系统的设计与开发[D]. 广州:华南理工大学,2017.
[6]Kumari P,Rastogi A,Shukla A,et al. Prospects of genetic engineering utilizing potential genes for regulating arsenic accumulation in plants[J]. Chemosphere,2018,211:397-406.
[7]卞和营,薛亚许,王军敏.温室大棚温湿度模糊控制系统及PLC程序设计[J]. 农机化研究,2014,36(9):147-151.
[8]邢希君,宋建成,吝伶艳,等. 设施农业温室大棚智能控制技术的现状与展望[J]. 江苏农业科学,2017,45(21):10-15.
[9]刘 枚,崔卫花. 基于模糊层次分析法的一体化物流风险评价[J]. 物流技术,2014,33(1):217-219.
[10]陈少伟. 基于Android平台的植物生长信息采集与分析系统的开发[D]. 西安:西安理工大学,2019.
[11]计 桥. 温室辣椒栽培技术[J]. 吉林农业,2019(14):78.王甲辰,梁丽娜,王学霞,等. 基于高光谱的夏玉米氮含量及产量估测模型[J]. 江苏农业科学,2020,48(23):227-233.
