Unity Pro编程中PID调节及无扰切换浅析
2020-02-22潘宁吴琼
潘宁 吴琼

摘 要:本文介绍了自动控制中PID的含义,它在工业调节应用中广泛的使用。它的结构简单、稳定程度好、工作性能可靠,在线较容易调整,并且介绍了PID手自动无扰切换的重要性及实现的基本原理。举例说明了施耐德品牌产品Unity Pro编程中PID及其自动和手动模式相互跟踪的实现机制,并通过风机应用实例实现了较好的调节性能及无扰切换。
关键词:PID 无扰动切换 模式 Unity Pro
中图分类号:TL421 文献标识码:A 文章编号:1674-098X(2020)09(a)-0001-03
Abstract: This paper introduces the meaning of PID in automatic control, which is widely used in industrial regulation. It has the advantages of simple structure, good stability, reliable performance, easy adjustment online, and introduces the importance and basic principle of automatic undisturbed switch of PID hand. An example is given to illustrate the realization mechanism of PID and its automatic and manual mode mutual tracking in the programming of Schneider brand Unity Pro. A fan application example is used to realize better adjustment performance and trouserless switching.
Key Words: PID; Undisturbed switching; Pattern; Unity Pro
1 PID简介
随着社会经济发展和科技进步,工业产品以可编程控制器作为自动化控制的核心,进一步推进了对产品品质和工艺过程的要求。PID控制,又称 PID调节,在自动控制领域中,PID 算法一般由通过测量得到的反馈信号控制其被控量,由比例、积分、 微分三个部分组成。有时又根据需要,简化为PD、PI等模型。一个闭环控制回路至少有两个信号:过程测量值PV和PID的控制输出。现场信号根据测量原理和传输方式各不相同,都需要根据实际情况做一些预处理,如单位变换、滤波等,极端情况下,可能因为现场干扰,数据经常出现一些虚假的极大值或极小值,这些都可以通过信号处理功能块去除。输出值也会根据执行机构的特性做限位、限速等处理等。
2 手动自动功能描述
工业过程控制中有时需要手动和自动模式的相互切換,不论哪种方式都必须保证过程无扰动,输出量不应在瞬间出现较大波动,应较好的保持在一定的品质内。正常运行时,系统处于自动;调试或出现故障时,系统切至手动。由于采用了积分调节规律,手动操作时控制器输出不确定。如果相互切换,不作任何处置,就会对调节对象造成较大的扰动,可导致执行机构大幅度的变化,破坏原有的平衡状态,甚至无法维持正常的生产过程。在串级反馈系统内/外反馈回路的切除与投入之间,也会有此情况。
PID控制实现无扰切换,需要编写赋值逻辑。要实现无扰切换,控制器应有跟踪措施。手动时,SP去跟踪PV,逻辑内运算增量为0,达到切至自动时无干扰的目的;自动时,手动值跟踪PID输出,这样,切到手动时无干扰。
简单来说,输出值用A表示,手动控制对应寄存器直接给定,给定值用B表示。当从自动切到手动时,将A 赋值给B,反之亦然。在切换的时刻,可以保证 A=B 成立,从而实现输出不发生剧烈波动。
3 Unity Pro 中的无扰切换
现在的PLC已经集成了各种PID功能块,甚至一些属于先进过程控制(APC)的功能也都能够实现。施耐德的Quantum系列PLC命名为QPC(Quantum Process Controller),拥有很强的过程控制能力,支持前馈、模糊控制(Fuzzy control)等高级功能。
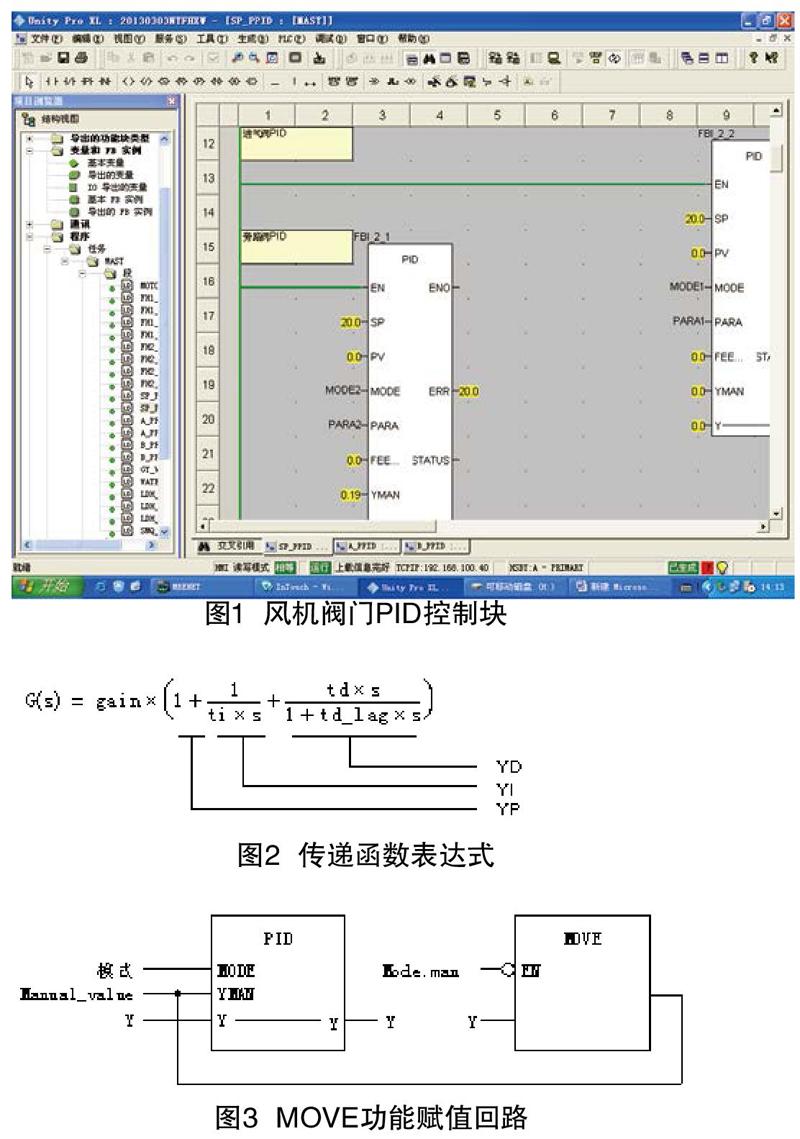
3.1 实际应用中PID表
如图1所示。
该功能块具有以下特点:带有独立 gain、ti、td 设置、手动、暂停和自动操作模式。两个参数设定引脚,一个是MODE,一个是PARA,可以通过赋值使能或禁止P\I\D三个功能,通过PARA设定PID参数以适应的调节,可通过反转 gain 符号反转控制器的行为。
如图2所示。
3.2 操作模式,通过Mode赋值修改
(1)自动模式Mode.man = 0:操作变量Y由PID算法、受控变量PV、引用变量SP确定,变量介于Ymax 与Ymin之间。
(2)手动模式Mode.man=1:手动操作值 YMAN 直接赋给操作变量 Y,保证无冲击地由手动切到自动方式。在此操作模式中,D 组件自动设置为 0。
(3)暂停模式Halt=1:控制器的输出不变;功能块不影响变量Y,Y为前值。控制器可无干扰地从当前位置继续运行。暂停模式对于通过外部操作设备来设置控制输出Y也很有用,由此可以在控制器内正确地跟踪内部组件。D组件设置也为0。
3.3 从自动切换到手动
由于输出 Y 可取 Ymax 和 Ymin 之间的任何值且 Y 在转换时直接转到 YMAN,因此从自动到手动的转换通常是有冲击的。如果要求无冲击地从自动转换到手动,有两种方法实现:
(1)通过 MOVE 进行切换。
使用 MOVE 功能将 YMAN 的值设置为 Y 的值如图3所示。
仅当 PID 控制器处于自动模式(Mode.man = 0)中时才执行 MOVE 功能。如果只发生一次从自动到手动的转换,则由于在此循环中 YMAN 的值等于 Y 值,该转换是无冲击的。在手动模式中 YMAN 的值可以缓慢地变化。
(2)通过 VLIM 进行切换。
如果不希望更改 YMAN(例如当它为常数时),则使用限速器(功能块VLIM)可以实现以前的解决方案如图4所示。
自动模式中,限速器处于手动。通过限速器手动值YMAN可将 PID手动值YMAN设为Y 值。如只发生一次从自动到手动的转换,则由于在此循环中PID 的YMAN 值等于Y 值,因此该转换是无冲击的。从调整值 Para.rate开始的YMAN 值与下一循环开始的实际 VLIM 手动值进行比较。
4 实际运行效果
在实际案例中,调节量为输送风机阀门开度,由4~20ma送至现场西门子PS2定位器。笔者根据PID的各经验参数及功能块特点,编制了进气阀、旁路阀的控制逻辑来调节,最终整定中使用了PI功能,因为调节对象时间常数较小,而对象外扰的纯延迟较大,微分作用效果不大。整定后能较好地完成预期目标,并且输出无扰动,实现了手、自动双向无扰切换。参数设置如图5所示。
参考文献
[1] 雒雪峰.数字技术在工业自动化中的应用分析[J].科技创新导报,2019,16(21):10,12.
[2] 林达春.基于机器人教学的创新编程思维培养模式与实践研究[J].教育信息技术,2020(4):28-30.
[3] 于涛,刘海华.逻辑设计法在PLC编程中的应用[J].机电信息,2020(9):86-87.
[4] 张骁.城市轨道交通环境设备监控系统中多模式控制的设计与实现[D].南京:东南大学,2018.
[5] 刘艳玲.浅谈高职院校数字媒体应用技术人才培养的关键[J].计算机产品與流通,2020(8):192.
[6] 秦炜刚.广播电视中数字技术的应用[J].科技资讯,2018,16(35):23,25.
