基于可编程逻辑控制器的银杏园智能灌溉机器人设计与实现
2020-02-07李杜林萍陈永明
李杜,林萍,陈永明
(盐城工学院 电气工程学院,江苏 盐城 224051)
随着高新技术与现代农业的发展和应用,传统的农业管理模式已经不能适应现代农业发展的需求,亟须引入先进的技术管理手段。水分是影响作物生长的关键环境因子,合理的灌溉手段是提高作物产量最有效的途径。智能灌溉模式不仅可以节水节工,而且还可以在灌溉过程中避免人为产生的不利因素影响,提高灌溉的准确性和水资源利用效率[1-3]。在此背景下,以叶用银杏园为研究对象,设计一种利用可编程逻辑控制器(PLC)实现智能控制的灌溉机器人,按照银杏树的需水规律进行不同生育期的需求设计,把水分定时定量直接提供给银杏,实现智能控制,为银杏园的灌溉工程提供简便、省力与高效的智能化解决方案。
1 系统介绍
灌溉机器人采用三菱PLC作为控制核心,将传感器采集到的数据与PLC内部程序中的设定值进行比较,通过比较结果输出PLC控制指令,驱动执行机构的动作。同时,通过控制喷灌通路电磁阀的通断时长来实现对喷灌水量的控制。
2 控制原理
采用PLC作为灌溉机器人的控制中心。PLC外部接线简单,内部程序编程易于掌握,在输入输出信号时采用光电隔离,对外界的抗干扰能力强,而且灌溉机器人的控制系统输出信号都是开关量,因此,PLC控制器十分适合在室外银杏园环境中应用[4]。三菱是市场上常见的PLC品牌,本设计采用三菱FX2N-32MR-001型PLC。
PLC的输入信号包括温湿传感器采集的模拟量。这些模拟信号首先经过三菱的A/D转换模块(三菱FX2N-4AD)转换成数字信号,然后传输到PLC中供PLC内部存储程序进行处理与运算。位置传感、测距传感器、水位传感器采集的信号为数字量输入,可以直接进入PLC进行逻辑处理,最后输出控制信号。机器人控制系统中,PLC控制的部分有给水泵和灌溉泵启停,水箱盖开闭,以及前轮的电动机、灌溉转台电动机、蓄电池的通断(图1)。
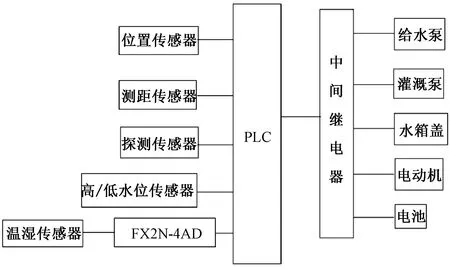
图1 灌溉机器人的控制原理
3 系统设计
3.1 机器人灌溉路径设计
在银杏园的灌溉路线上铺设电磁引导线,采用信号发生器使电流发出电磁信号。在灌溉机器人的两端设置电磁传感器,采集电磁引导线发出的电磁信号并发送给PLC进行逻辑处理。PLC根据电磁传感器采集的电磁引导线信号作为依据,控制机器人的2个前轮电动机。具体如图2所示。
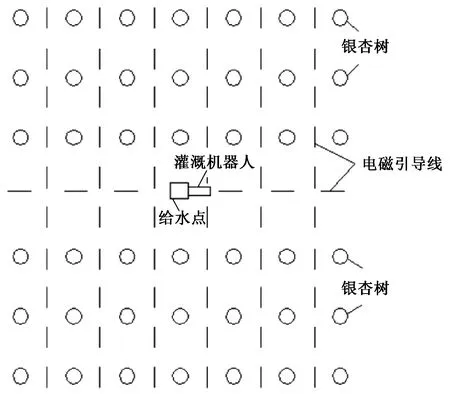
图2 银杏园的灌溉路径
3.2 机器人整体结构设计
水箱里设置水位传感器监测水量的变化。当高水位传感器监测到水位发出信号时,代表水箱中的水已满,PLC发出给水泵的停止控制信号和水箱盖的闭合控制信号,水箱停止补水,水箱盖合上,灌溉机器人开始灌溉工作。反之,当低水位传感器监测到水位时,代表水箱里已经没有水。
机器人根据设置在两端的电磁传感器采集到的电磁引导线信号控制前轮电动机后退到给水点进行水箱补水。给水泵设置在给水点处,用于给灌溉水箱补水。位置传感器3设置在灌溉管道上,当PLC接收到位置传感器3的信号时,意味着灌溉机器人已经处于给水位置,PLC便会发出给水泵的启动控制信号和水箱盖的开启控制信号,进行水箱补水。具体机器人结构设计如图3所示。
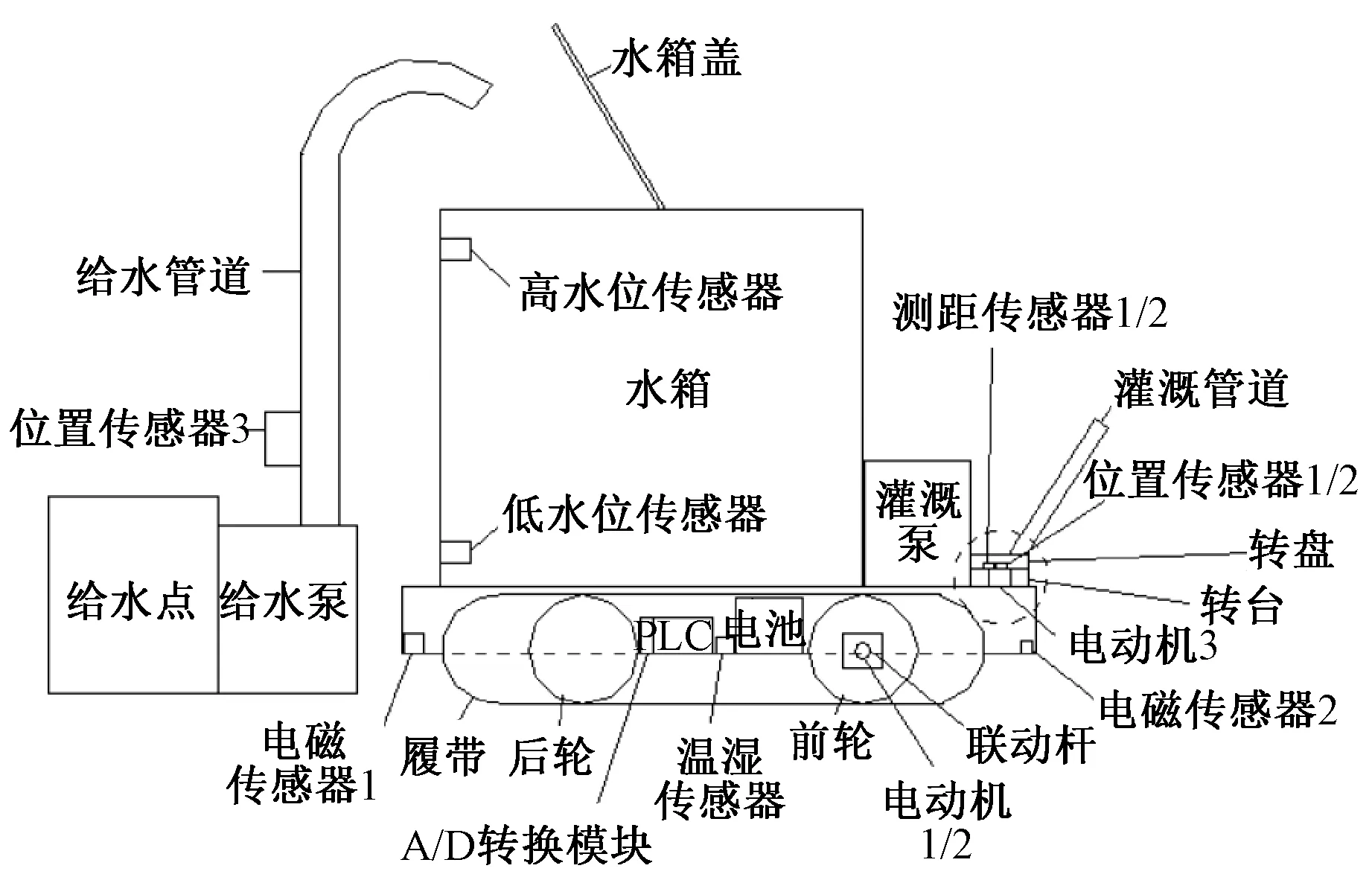
图3 机器人整体结构的设计
3.3 机器人底盘结构设计
机器人的底盘可采用亚克力板,这种特殊处理的有机玻璃硬度高,抗老性能好,可以适应风吹雨淋、日光照射的室外环境,而且透明度好,在检修过程中利于操作人员方便作业[5]。
在机器人底盘上,灌溉水箱后置,电动机和电池前置,以避免头重脚轻的情况,保证机器人移动时平顺。
由于银杏园的林间道路并不十分平坦,因此采用履带推进方式。根据机器人与灌溉水箱的质量,电动机1和电动机2采用250 W直流旋变无刷伺服电机,通过联动杆,将动力从电机传递到2个前轮上。根据电机1、2和灌溉水泵的电机型号,选择3个N100 12V 100AH的电池并联,为机器人提供充足动力。
电动机1和电动机2通过联动杆分别控制机器人两侧的前轮和履带。当机器人前进和后退时,2个电动机同时启动,以共同的速度前转或者后转。当机器人转弯时,2个电动机中的一个停止工作,另一个电动机保持转动,使机器人完成转弯动作。电池放置在机器人上用于机器人上电动机的供电。当机器人上的电动机即将没电时,给PLC发出信号,PLC控制机器人回到给水点的位置。电池旁设置温湿传感器。当温湿传感器发出信号时,指示温度与湿度环境已经不适合机器人运作。当PLC接收到温湿传感器信号后,发出电池停止供电的控制信号,同时发出无线信号通知管理人员进行维修或者回收。
电磁传感器负责探测敷设在银杏园地面的电磁引导线位置。PLC根据电磁传感器探测的信号控制机器人的位移。具体的机器人底盘结构设计如图4所示。
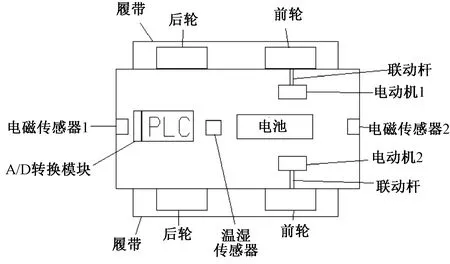
图4 机器人底盘结构的设计
3.4 灌溉管道转台结构设计
测距传感器1、2分别布置在灌溉管道转台的两侧。测距传感器采用AJ-SR04 M一体化超声波测距模块,该模块的测量距离可以根据银杏园树木的实际间距进行设置。当测距传感器1探测到有树木经过时,PLC发出信号控制机器人暂停动作,同时控制电动机3通过正反转带动转台和灌溉管道向测距传感器1所在侧转动。当灌溉管道灌溉方向转动至测距传感器1侧的树木时,位置传感器1发出信号,PLC接收到信号后发出电动机3的停止信号与灌溉泵的启动信号,机器人开始喷水灌溉。灌溉的水量依据灌溉管道喷水的时间进行控制,当喷水时间达到设定值后PLC便会控制灌溉泵停止运作,同时控制机器人继续行进,直至灌溉水箱没水。具体如图5所示。
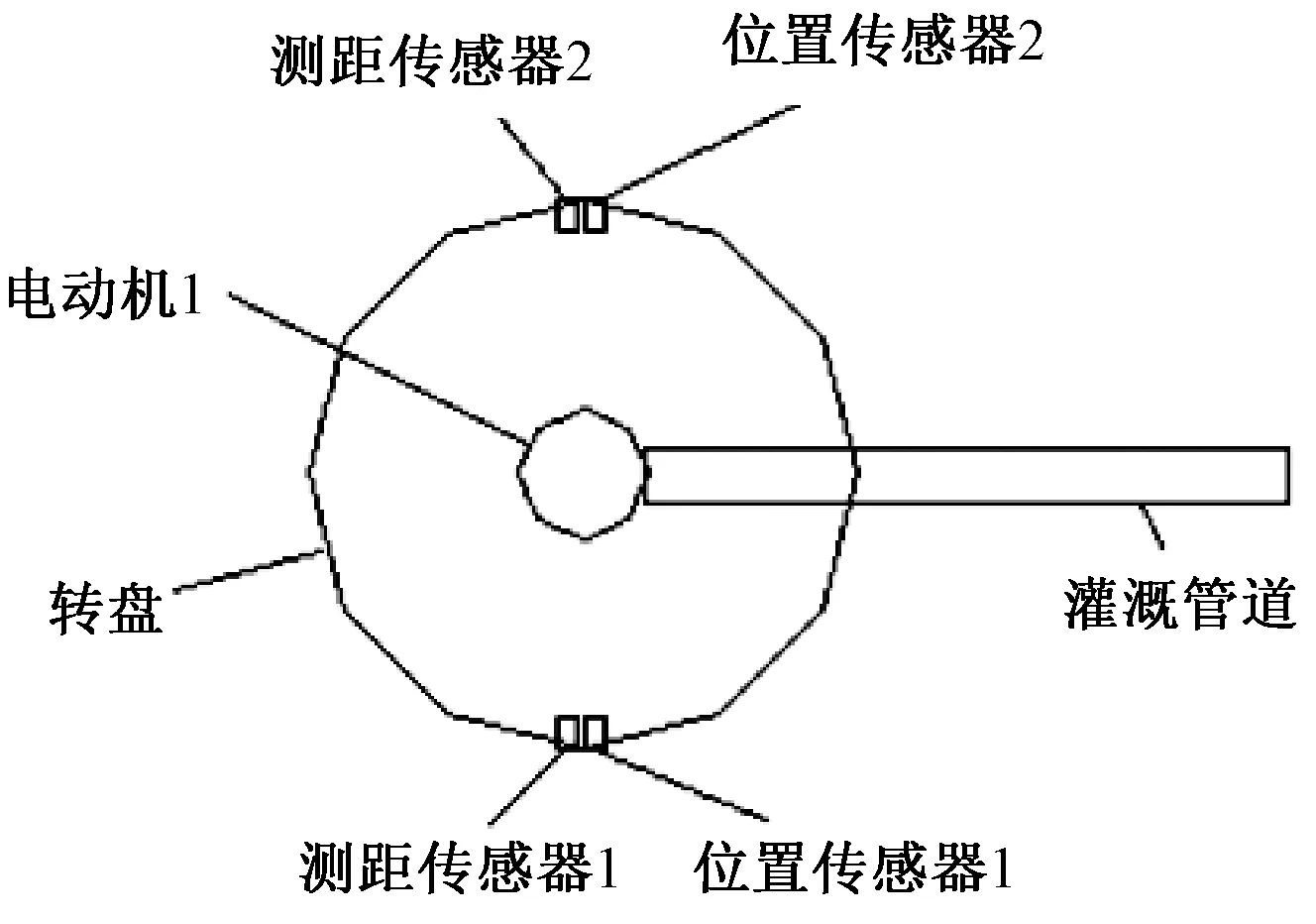
图5 灌溉管道转台结构的设计
4 小结
将PLC应用在灌溉机器人的控制中,简化了灌溉系统的结构设计与硬件接线,实现了灌溉的智能控制,达到了节省用水和节省人力的目的,灌溉质量也得到了显著提高。
