电子元器件自动分类的算法研究与系统开发
2020-02-04丁然
丁然
(珠海全志科技股份有限公司 广东省珠海市 519000)
在被集成使用的当代电子类产品中,无论是大型工业机械设备还是小型通讯等设备,均离不开对电子元器件的管理与优化。而大量的电子元器件在被同时纳入某一既定产品方案时,无论是前期选用和组装,还是后期监控维护,都将首先解决分类识别问题。在传统的分类模式下,依靠人工或者相对传统的识别分类技术对元器件进行比对和核查,将会出现工作量繁重且高失误的问题。因此需要结合现有技术条件,采用自动识别和分类模式,提高工作效率,降低错误概率。电子元器件大致可分类为电阻、二极管、继电器、电容、集成电路和三极管等,每种元器件的特征和用途各不相同,且部分元件器还存在外观相似性,因此不同的技术或算法在区分不同元器件时就具有不同的功效。由此,可尝试在自动分类系统中摄入不同的算法,以提高分类识别的准确性。
1 图像分类算法
1.1 算法要点
电子元器件计数和分类的预期精度为100%,但元器件的个别规格过小,比如某些微型元器件的长宽数值以毫米为单位,如长2毫米、宽1 毫米、高0.5 毫米。在此情况下,不同类型的元器件将出现视觉上的雷同。同时,同一元器件还有正反面之分。另外,由于元器件过小,所以在分类操作时还可能出现两个元器件粘连的情况。如何实现快速有效的筛选分类,如何区分正面与正面、正面与反面、反面与反面的粘连,并且分割计数和识别,就为分类算法带来了很大的挑战。
1.2 算法概要
针对元器件粘连的难题,必须使用到分割算法,如流域分割、极限腐蚀、阈值分割等等。我们可以基于此类算法,研究出基于图像技术下的层次特征抓取和数学形态综合分割法,将不同元器件主体特征进行凸显,以提高计算精度。也就是说,我们先对目标元器件群提取图像,并剥离背景图像,继而直接分割正反面元器件,分别计数,最后统计合值以求证误差情况。主要步骤如图1。
首先是图像的处理。将元器件集中摊铺放置于平整台面,并摄取静态图像,提取图像并结合元器件普遍色彩和特征,选择对应方案削弱或排除干扰,如删除背景图像,或者是选择最大反差的背景色。同时增强元器件图像的色彩,并且对局部灰暗或光照偏差等进行校正。最后对比图像,审视效果,以能充分识别每一单位元器件的显现特征为处理合格的标准。
处理后的图像要能直接判断出粘连元器件。此时重点是,对元器件进行图像分割以判断具体数量和类型,利用数学形态的相关理论与技术,对图像中的主次颜色进行修正,即灰度形态学修正操作,对共有特征进行弱化,而留下并强化异型特征,突出不同元器件之间的区别。进而对图像采取腐蚀处理,将处理结果以同种结构元素施加膨胀处理。修正后的元器件图像不仅具有色彩差异,还具有相应的其他特征差异,便于判断。在灰度修正之后,仍需要进一步分割粘连的图像,以确保每一个元器件都获得判别和分类。利用直方图阈值分割法,设置好对应的门限,结合结构元素去除正面朝上的元器件边线,就可以得到反面朝上的元器件图像。提取完反面朝上元器件后的图像,可作为正面朝上元器件的图像基础,经增效处理强化后得到目标图像,最后进行分类和计数。
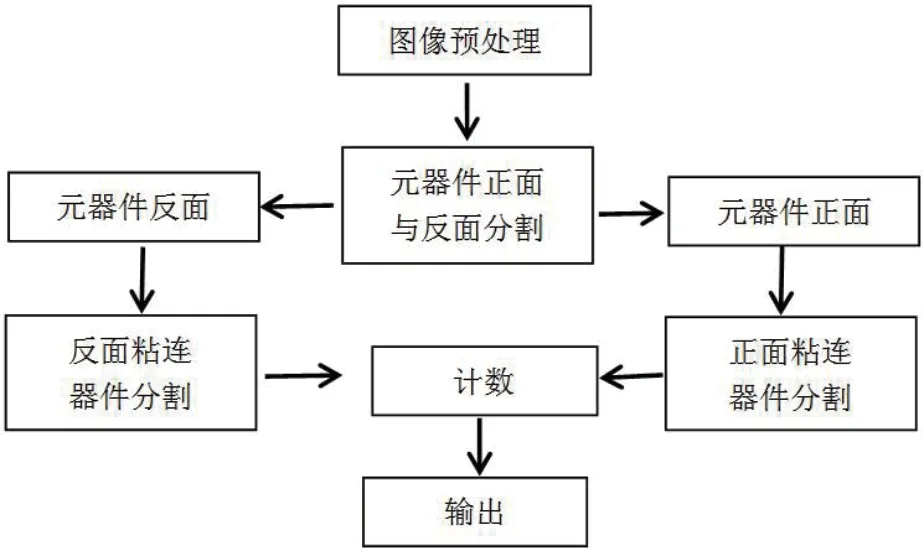
图1:图像分类算法流程
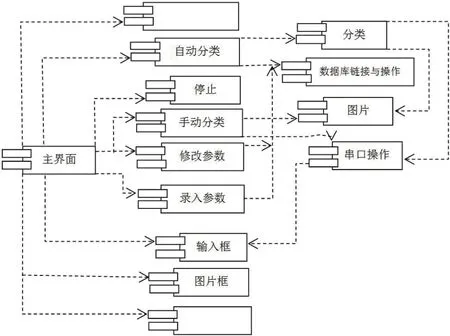
图2:系统软件开发构思图
整个过程中需要注重以下计算要点:
(1)数学形态分割原理,使用结构元素对图像进行如下操作,公式原理如下:

(2)利用数学形态学的梯度算法完成粘连分割处理,主要是背景、物体间的关联与分割控制。梯度计算公式原理如下:

2 物理特征分类算法
2.1 算法运行准备
以阈值分割法为基础,对待测电子元器件进行识别和图像处理。整个过程与图像分类算法有一定相似性。先将电子元器件的基本属性进行定位,并形成基本图像,进而对图像的边缘虚像进行清理,通过Canny 算子获得噪声边缘的图像,又通过膨胀手法获得另外一个图像,再利用腐蚀取反获得另一个无噪声边缘的图像。三个图像进行综合运算,可获得最终的低噪精准性图像,最终图像=A&B&C。
2.2 分类算法的方案
以蜂鸣器为例。因为蜂鸣器在多数时候呈现出圆形,所以可以使用圆检测算法,并可考虑强化圆形检测的图像效果。对二值图像分别沿x 轴和y 轴投影,按下列条件求出两个投影图的波谷作为元件的起止位置。以沿y 轴(垂直)投影求列起止位置为例:

垂直投影profv 是长度与图像高度相同的列向量。 将投影曲线符号化, 即:

考察符号向量的0~1 变化次数以及1~1 连续次数,若有0~1 突变且1~1 的连续次数达到三次,则判定跳变点为列起始范围;若已有1~1 的连续次数达到三次且出现1~0 突变,则将跳变点判断为列的终止点,范围区间则是终止范围。需要求取的目标值,为电子元件的x 轴以及y 轴方向上的半径数值。为了确保求取结果的客观可靠性,可以进行多次统计,求取平均值。所得的结果数值中,以x轴与y 轴方向长度读数作差。若所得差值在5 以内,并且通过圆的面积公式得出数值与之前的景象素数量存在高度关联性或相似性,便可以判定此元器件为蜂鸣器。
3 朴素贝叶斯分类算法
朴素贝叶斯分类算法用于电子元器件分类是一种高水平尝试。朴素贝叶斯算法以概率计算为基础,有效完成目标任务。该算法下重要的技术包含了文本表示模型、分类算法、数据和特征处理、交叉验证等。通过前期数据的专业化处理,可制作“分类器”完成分类任务。
朴素贝叶斯分类算法的实现主要包含以下环节:
(1)将分类数据、标准及电子元器件的相关数据进行整理,将整理后的数据信息用特殊文本表示,并且适配成分类器和计算机等核心系统足以识别的特殊格式,即将原始文本转化为规范数学模型,分类器获得执行模型,作为对元器件进行分类的初始依据。其中需要注意,对文本进行规范化特殊表示时,需要注意对特征进行提取,列举关键词后进行集中表示,然后对不同的特征以权重值进行标志,实现基本信息关联。
(2)将文本信息输入分类器中,对分类器进行系统训练,其中包含对各项特征的区分和算法的演练,构建出适用于分类处理的模型。
(3)分类器获取处理好的数学模型,并且结合模型进行自动判断,实现分类器的自动分类。
(4)挑选待测文本样本,参照之前文本处理和训练流程,由分类器完成测试,并参考测试结果判定分类器运行的效果,同时对模型进行改良,或在制备多种模型的情况下,选择出效果最佳的模型。
朴素贝叶斯分类算法的基础是贝叶斯原理,核心公式为:

在事件Q 已经发生了的条件下,事件Y 再发生的概率,记为P(Y|Q)。P(Y)是事件Y 的先验概率。Y 相对于Q 的后验概率P(Y|Q)比Y 自己的先验概率P(Y)要基于更多的信息算出,P(Y)是独立于事件Q 的。当然,P(Q|Y)就是基于事件Y 发生的情况下,事件Q 的后验概率。
4 系统开发
如图2 所示,电子元器件分类系统的功能实现和系统开发,需要对硬件及辅助软件进行优化。装设高精度的摄像头,对电子元器件进行拍摄取照之后传输到系统中心,由系统中心负责进行识别和统计处理。系统中心对于图像的识别速度控制为0.15-0.3s/帧(幅)。系统要预设电子元器件分类清单,大致可以分为蜂鸣器、二极管/三极管、电阻、继电器、塑料件、集成电路、电容、其他共计八类,并录入各类电子元器件特征,设置操控代码,通过代码可实现部件或关联设备的启停或工作模式的选定。用户可接入系统,拥有采集相关工作数据、拷贝工作成果的接口和权限设置。此外,系统还应具有更加细致的功能,如对集成电路更加精细的判别标准,二极管和三极管的细微差别辨析标准,元器件识别后的自动分类和计数,识别遗漏或错误时的人工补充操作模式等,以此提高系统的可行度。此外,针对区分难度较大的微型电子元器件分类计数系统的设计,需要着重对图像处理和人机交互程序进行优化,以确保自动分类计数依靠人工操作可以获得优势补充,尤其是在微小特征的共性排除与异性提取方面,需要精确计算和处理。
5 总结
电子元器件的分类系统需要利用可行方案,优化识别的精准性,同时提高容错效果,根据用户不同的要求和用途,对系统的某项功能能够进行个性化提升。经过多年大量实践,可用于电子元器件分类的可靠技术已自成体系。但现有各类电子元器件的识别和分类系统,效果仍不理想,如识别存在不固定的差错或盲点,以至于结果出现误差。要进一步缩减此类误差,还需要在以后的工作中不断研究,在提高精度的同时,融入自动分类和结果自检方案,确保分类精度无限趋近百分之百。