水稻钵体育秧智能补种决策方法与试验
2020-02-02周海波李晨铭王海欣
周海波 李晨铭 张 镔 王海欣 李 霞
(1.天津理工大学天津市先进机电系统设计与智能控制重点实验室, 天津 300384;2.天津理工大学机电工程国家级实验教学示范中心, 天津 300384)
0 引言
我国水稻种植技术以育秧移栽为主[1]。机械移栽在育秧方式上可分为毯状苗移栽、钵体苗移栽以及钵体毯状苗移栽等,其中钵体苗移栽具有伤根轻、返青快、分蘖早、秧龄弹性大的优势,弥补了传统机插秧的不足,增产显著,已成为主要的水稻种植模式。现有排种器可以达到1~3粒/穴的性能,但空穴率达5%,单粒穴比率也比较高,同时受种子发芽率和秧苗伤秧率的影响[2-3],使水稻种植的成秧率较低,故需要补全空穴、减少单粒穴率,以保证水稻钵体育秧的播种质量,这对杂交稻钵体育秧2~3粒/穴的理想播种目标尤为重要。目前,针对漏播补种问题的研究较少,缺少补种决策方法及技术等相关理论依据。因此,提升水稻钵体育秧播种机补种装置的智能化和自动化水平具有重要意义[4],对蔬菜、花卉等钵体育秧作业的低播量精密播种也具有借鉴意义。
针对育秧精密播种的监测预警和检测控制等国内外学者进行了很多研究[5-10],但对补种工序研究相对较少。由于播种质量的实时检测、补种机构的效率问题很难突破,无法满足实际生产需求,从而成为了秧盘育秧精密播种技术发展的瓶颈。周海波等[11-12]研制了2CYL-450型水稻秧盘育秧精密播种机,该机可满足不同播种量的生产需求,达到1~3粒/穴的精量播种性能指标,但单粒穴和空穴问题仍无法避免。为了解决播种质量实时检测的问题,齐龙等[13]设计了检测水稻秧盘空穴位置视觉系统,并建立了与穴孔相对应的掩摸图像,识别空穴准确率达到75%。邱兆美等[14]设计了小粒种子电动播种机作业质量监测系统,采用多传感器检测技术,检测精度达96%,实现了实时监控、显示和报警。TAN等[15-16]提出一种杂交稻籽粒分割计数算法,基于分水岭算法、改进的角点算法和BP神经网络分类算法对杂交稻的粒数进行分类计数,平均准确率达到94.63%;同时为解决机器视觉系统只能捕获部分秧盘补种图像的问题,提出一种结合相位相关和SURF的快速秧盘图像拼接技术PC-SURF,以获得整个秧盘的播种性能,拼接速度也满足实时性的要求。DONG等[17]提出一种杂交水稻播种性能实时在线监测系统,该系统基于HSL模型的固定阈值分割技术提取网格图像和种子图像,计算空穴的数量,并利用机器学习方法监测托盘播种的种子数,在生产效率低于500盘/h条件下,种子数检测的平均准确率为95.68%。
本文采用视觉检测、智能补种决策、伺服电机驱动和组合吸针等技术,设计一种高效智能补种决策系统,对钵体盘播种质量进行检测,优化空穴和单粒穴补种方案,通过伺服电机驱动和气动组合吸针相结合实现水稻育秧的高效补种。
1 系统设计
1.1 结构与原理
智能补种系统主要由视觉采集与检测系统、伺服补种机构、气动组合吸针组成,以及由LabVIEW软件开发的计算机运动控制系统,如图1所示。首先,水稻育秧播种机对钵体盘进行播种,播后钵体盘随输送系统经过视觉采集传感器,视觉采集系统实时采集图像,采集到当前水稻钵体盘的图像信息,再通过图像检测系统对钵体盘播种质量进行检测,同时将种群分布信息以数组的形式存储。然后,采用卷积计算方法,智能决策空穴和单粒穴的补种方案。最后,当钵体盘运送到补种传感器位置时,由伺服电机驱动和组合吸针相结合的补种机构,实现精准、高效、连续的动态补种过程。
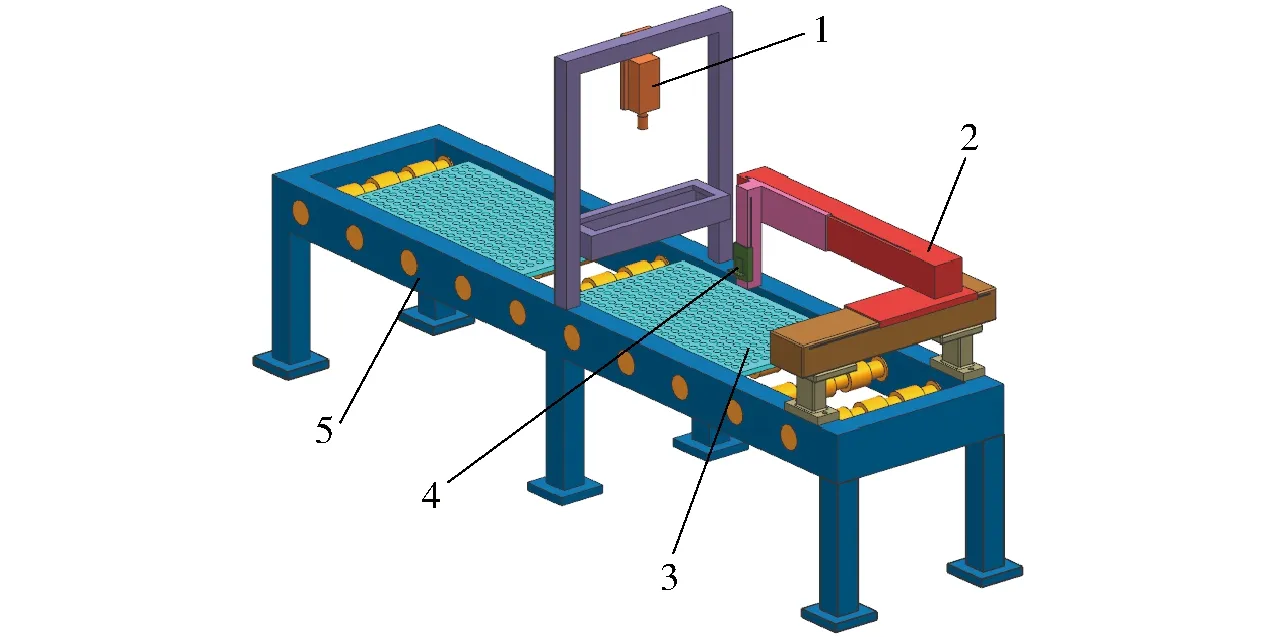
图1 智能补种系统结构示意图Fig.1 Main structure of intelligent precision reseeding mechanism1.视觉采集与检测系统 2.智能补种器 3.秧盘 4.组合吸针 5.机架
1.2 视觉采集与检测系统
输送机构将水稻钵体盘输送到视觉采集传感器的位置时,触发传感器产生高电平信号,启动图像采集系统实时采集图像,CCD相机通过千兆网(GigE)传入计算机,进行水稻钵体盘中种子穴粒数信息提取。
在图像采集完成后,对图像进行预处理。本视觉检测系统中采用加权平均法进行灰度化处理,将彩色图像转换成有256个灰度级的灰度图像,再利用二值化方法即大津法(Otsu法)得出合适的阈值。最后对图像进行先腐蚀后膨胀的去噪处理,使种子图像的轮廓光滑、毛刺消失;然后采用面积剔除法,去除图像中的细小反光点,最后建立12×6个穴位掩膜图像与原图像进行重叠,并进行单个掩膜种子数量的提取,得到一个包含穴位位置和粒数信息的种群分布数组存入数据库以供调用[18]。
1.3 伺服补种机构
伺服补种机构(如图2所示)由交流伺服电机驱动的X、Y、Z三轴水平式机械臂和气动系统构成,可以实现机构的吸种、携种、补种连续运动轨迹控制。
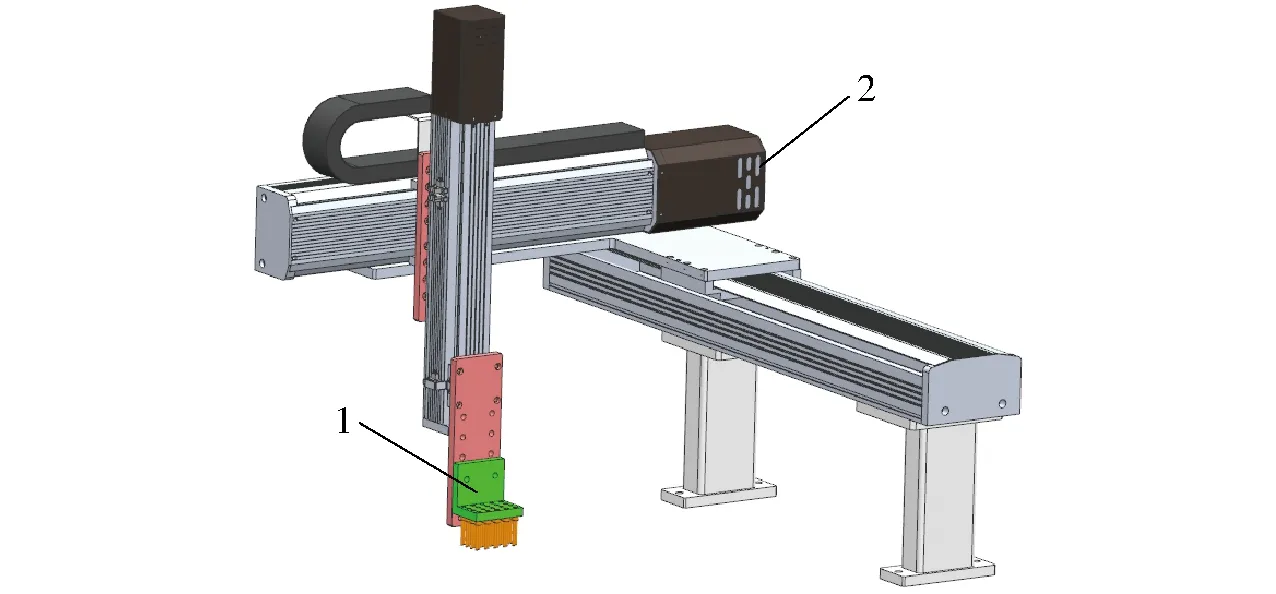
图2 伺服补种机构结构示意图Fig.2 Servo reseeding mechanism1.组合吸针 2.伺服机构
由于机构要求具有高精度、高速度,需要选用大扭矩、高精度的电动机作为执行元件,3个轴均选用松下MINASA5系列交流伺服电机。
气动系统主要由组合吸针、真空发生器、两位五通电磁阀、气泵、计算机、数据采集卡、电压放大电路等组成,如图3所示。组合吸针吸种是利用上位机使数据采集卡的输出物理通道产生电平信号,再经共射极电压放大电路输出24 V电压来驱动二位五通电磁换向阀的先导阀改变位置。即数据采集卡的物理输出通道为低电平时,电磁换向阀处于断电状态,出气口为正压气,此时组合吸针为补种状态;反之当数据采集卡的物理输出通道为高电平时,电磁换向阀处于通电状态,再通过与另一进气口连接的真空发生器形成负压力,此时组合吸针为吸种状态。
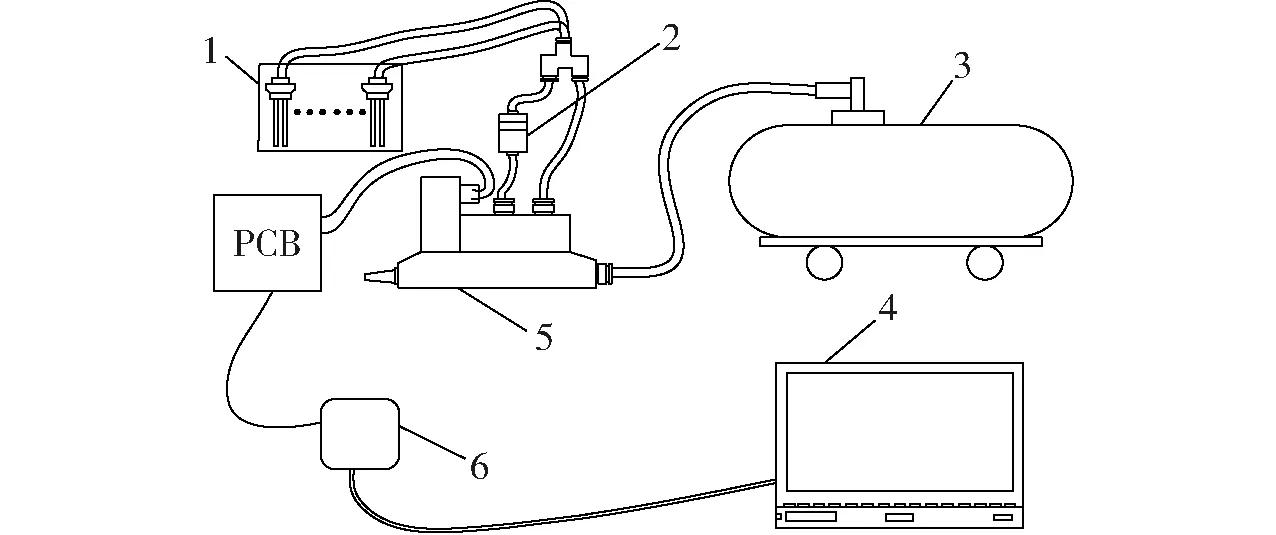
图3 气动系统原理图Fig.3 Pneumatic seed suction system1.组合吸针 2.真空发生器 3.气泵 4.计算机 5.电磁阀 6.数据采集卡
1.4 组合吸针
为了使补种操作更加高效,减少每一次补种的周期时间,本文提出组合吸针的方案,即多个双孔针头按照行、列组合起来(如图4a所示)。将组合吸针固定在伺服补种机构Z轴上,代替原来单个吸针的位置。
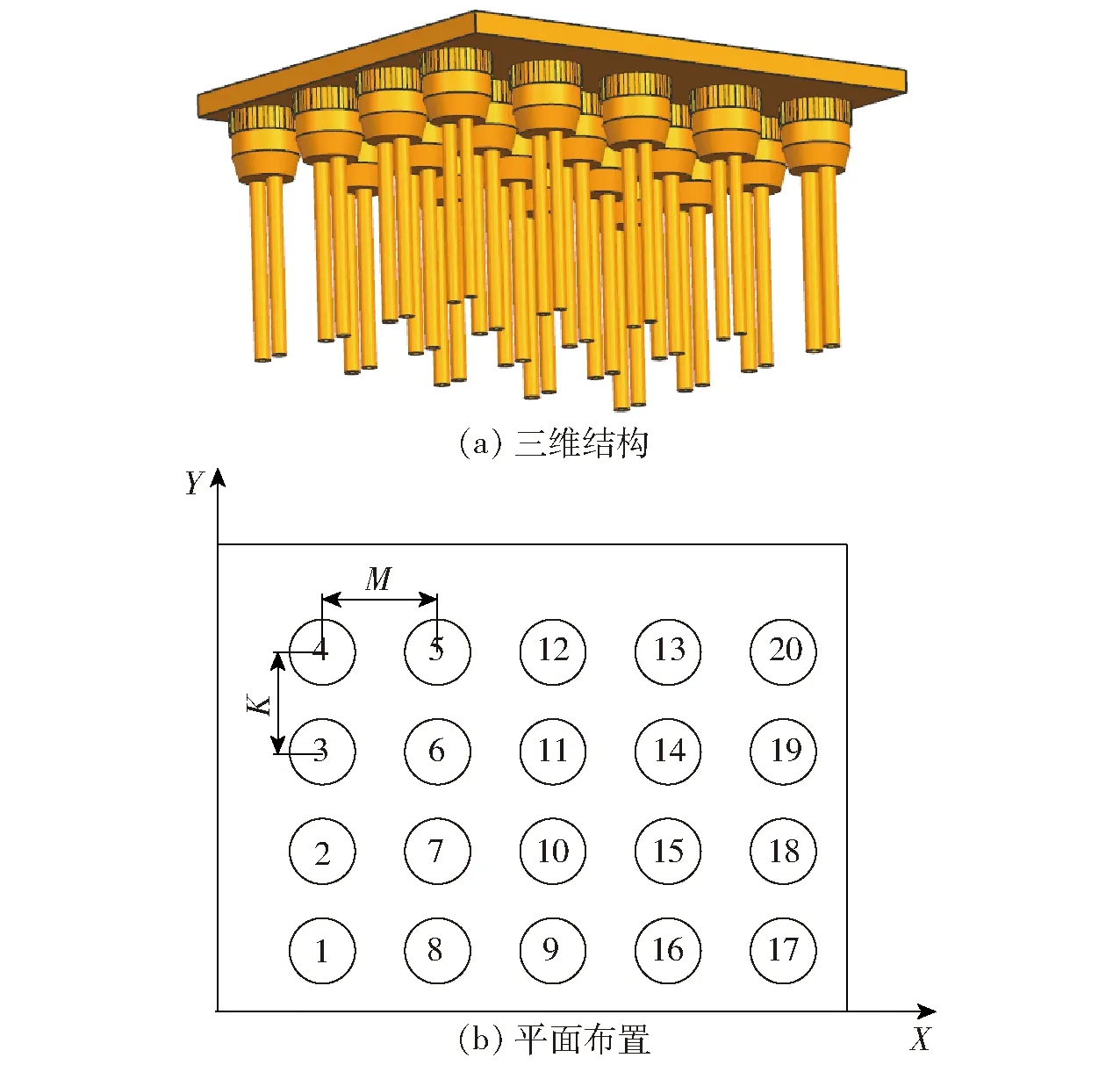
图4 组合吸针Fig.4 Combined sucker
本研究采用的钵体盘规格为23穴×12穴。经播种工序后,统计空穴率a为0~3%;综合考虑智能补种系统补种率和生产率,由智能控制系统决策出真正待补穴位占全部1粒穴比例b为0~4%。伺服补种机构需将空穴和部分1粒穴重新补种,建立组合吸针中双孔吸针个数与水稻钵体盘中待补穴位的数学模型为
(1)
由式(1)中J可知每水稻钵体盘中的空穴和待补1粒穴个数都在0~20个之间。所以设置组合吸盘中装有20个双孔吸针,以保证每一个待补穴位都有对应的双孔吸针进行补种,满足所有钵体盘的补种需求。
在补种动作开始之前,保证组合吸针中的20个吸针在补种槽同时吸种,组合吸针可以吸取原来单个吸针20倍的种子。按照智能补种决策方案中的就近原则选择下一个补种穴位,并计算出相应吸针到达下一个预测补种位置的动态坐标,该吸针下落至相应穴位吹气补种,如此往复,直至补完最后一个穴位。组合吸针省去了伺服补种系统每一次补种回到补种槽重新吸种和赶往下一个穴位的时间,为总体补种节省了时间,提升了补种效率。组合吸针利用传送钵体盘与钵体盘之间的间隙,恢复到系统原点,等待为下一钵体盘吸种。
1.5 吸种参数设计
为了进行精准补种操作,不伤害种子并保证气吸的稳定性,对吸针吸取单粒种子时的参数进行设计。组合吸针选用天弘点胶16G双孔针头,小直径1.25 mm,大直径1.61 mm,可以实现单次吸取2~4粒种子的作用。采用风豹无油空气压缩机作为气泵,额定压力0.7 MPa,吸针吸种性能与气体负压有关,当种子被吸附后,双孔吸针吸嘴处内外压力差使得种子被牢牢吸附,受力分析如图5所示。
芽种千粒质量与种子所受吸力为
Fp=bCd(G+N)
(2)
其中
Fp=ma
(3)
式中N——吸针支反力,N
Fp——种子所受吸力,N
G——杂交稻芽种种子重力,N
m2——芽种千粒质量,kg
g——重力加速度,取9.8 m/s2
b——双孔吸针的最大吸种个数,取2~4
Cd——阻力系数,考虑吸种过程中的空气摩擦力,以及种子之间产生碰撞的等阻力,Cd取1.8~2
吸种临界负压计算式为
(4)
式中S——吸针的横截面积,m2
d——双孔针头小直径,m
经理论计算后通过试验验证吸种最小负压。选取杂交稻种子泰丰优208、特优2068、国稻1号作为研究对象,分别测量干种千粒质量m1,芽种千粒质量m2[19]。试验时测量双孔吸针的吸嘴到种槽中“沸腾”种子的距离为1~3 mm,每次至少吸2颗种子,记录此时吸种负压。在携种条件下,当速度为1 400 mm/s和加速度为1 500 mm/s2时,对3种杂交稻分别重复进行10组负压吸种试验,并取负压最大值,试验结果见表1。

表1 3种水稻种子吸种负压试验结果Tab.1 Pressure test on three rice seeds
由表1可知,杂交稻芽种的质量越大,所需的吸种负压越大。由于理论计算中未考虑补种系统的振动和组合吸针中各吸针气体相互交换造成的干扰影响,导致试验数据要比理论计算值大。为保证双孔吸针的吸种性能,设置负压为3.5 kPa,且种子可以随伺服补种机构以最大速度和最大加速度运动,一直被吸附不掉落。
为防止种子中的细小杂质堵塞吸孔,从而影响播种的性能,在普通的双孔吸针中加入通针和十字挡片(如图6所示)。在正负压气体的作用下,可以推动通针往复运动,对双孔吸针进行清孔,吸入的杂质以及灰尘可以在负压作用下经气管排出,十字挡片限定通针行程,从而解决了双孔吸针易堵塞和清理问题。

图6 双孔吸针结构示意图Fig.6 Schematic of double hole suction needle structure1.吸管 2.十字挡片 3.双孔吸针 4.通针
1.6 运动控制系统
伺服驱动补种控制系统采用LabVIEW与C++联合编写。由计算机发出执行信号,通过运动控制卡、端子板向伺服电机驱动器输出脉冲,控制伺服电机的旋转方向与转速,进而控制伺服补种机构的移动。
运动控制卡GTS-400-PG-PCI是固高科技有限公司的一款运动控制卡,端子板GT2-400-ACC2-V2.2-G是连接运动控制卡和驱动器的中间设备,并控制3个电机的运行,控制电机有2个脉冲接线和2个方向接线。而且运动控制卡和端子板靠专用中继电缆CN-17来连接,并给端子板提供24 V的直流电源。伺服电机驱动器采用单相电供电,交流220 V,驱动器型号MADKT1505E,工作在位置控制模式下,U、V、W及地线和伺服电机相连,X6位置是与伺服电机编码器相连的带屏蔽线的四芯电缆线,因为电机工作在低频脉冲下,X4位置需要引出2个脉冲和2个方向线,供给其24 V直流稳压电,最后引至伺服信号使能端。
单纯依靠林业部门的投资发展一个产业,并且要形成规模是远远不够的,在资金方面加大财政补贴力度,提高群众积极性,在政策允许的情况下,多渠道筹集核桃产业发展资金,如新农村建设、扶贫开发项目和水土保持工程等资金再给予倾斜。对符合国家信贷和产业政策的农业、林业龙头企业给予优先信贷支持。
2 定位算法
2.1 补种规划
伺服补种系统默认脉冲坐标是相对坐标,在补种之前需要改变每一个吸针的脉冲坐标位置。组合吸针共有20个双孔吸针,智能决策补种系统标定水稻钵体盘的第1个吸针中心位置为系统原点。为减少组合吸针的补种移动距离,补种吸针按“S”形顺序依次补种,如图4b所示。视觉采集和图像处理系统识别出水稻钵体盘中需要补种的第1个穴位用第1个吸针补种。再补下一个待补穴位时,需要改用下一个吸针补种,实现对应的穴位用对应的吸针进行补种,并由智能控制系统计算出动态待补种穴位坐标再加上组合吸针的各双孔吸针的相对变换坐标,得到最终的待补种穴位脉冲输出坐标。
2.2 补种决策
为保证水稻育秧播种的质量,提高补种器的补种效率,避免盲目补种,智能决策补种系统需要达到消除空穴、减少1粒/穴的效果,决策出真正需要补种的1粒/穴并保证以1粒/穴周边穴位种子数,使秧苗具有更高的播种合格率。根据视觉检测系统检测出水稻钵体盘图像的种群分布数据库的穴位数据信息,辨识补种穴位的决策过程如下:
(1)首先检索出数据库中必补的0粒穴的位置信息,将其穴位直接存入待补穴位数组中。由于双孔针头至少能吸取2粒种子进行补种,所以为方便决策出需要补种的1粒穴位,假设已检测出来的0粒穴位用2粒补齐。
(2)将视觉检测系统采集到的水稻钵体盘中种子信息结合卷积计算的思想[20-21]进一步决策出待补种1粒穴。卷积是对两个实变函数的一种数学运算。
设立1×3卷积核,卷积核中每一个权重都设为1,步长为1,再与存有种子个数信息数组中每一个元素相乘线性加权,并将计算数值存入输出结果,输出数值小于6则补1粒穴位置,大于或等于6则进入下一循环的检测,决策此穴位是否补种。其中需要补种穴位的情况有4种,如表2所示。
(3)检测核心1粒穴(1≤x<11,1≤y<22)周边8个穴中所含1粒种子的数量。同样采用卷积计算的方法,设立3×3卷积核,卷积核中每一个权重都设为1,步长为1,输出卷积计算结果。如果周边1粒穴数量超过3个,卷积计算输出结果小于等于14,则无法保证钵体盘在此处的成毯性,需要补种核心1粒穴,将此位置1粒穴存入待补种数组。

表2 待补1粒穴决策方案Tab.2 Decision-making for single seed per hole
(4)补种路径规划由智能决策补种系统计算所有待补穴位(所有空穴和前期决策出的1粒穴)到组合吸针原点位置(x0,y0)最近的待补穴位(x1,y1)距离l,该穴位则是第1个待补种穴位。如果出现2个穴位距离相同,则先补同行或行数接近的穴位。
之后确定下一个最近的待补穴位,直至完成整盘最后一行的待补穴位的路径规划。
通过智能决策补种方案,为尽可能地降低待补种穴位的个数,同时保证水稻播种钵体盘的成秧率和成毯性,优化空穴和1粒穴的补种方案,使智能决策补种系统可以达到较高的生产率。
2.3 钵体盘穴位动态坐标定位
由LabVIEW控制系统通过数据分析出待补种的所有穴位后,对信息进行处理,并加上组合吸针原点位置的相对变换,计算出动态脉冲坐标,最终由伺服电机驱动和组合吸针相结合的方式进行补种。
假设钵体盘(0,0)穴位坐标为(x0,y0),则任意已完成穴位坐标为(x1,y1),当下一待补穴位坐标为(x2,y2),则它的动态待补穴位坐标为(x3,y3)。n为组合吸针中每一个吸针的编号,补种穴位数对应相同编号的双孔吸针。K为Y轴方向上相邻双孔吸针的间距,M为X轴方向上相邻双孔吸针的间距。(x4,y4)表示将组合吸针原点吸针位置变换之后的动态待补穴位坐标。X、Y轴滑块最大速度vmax,X、Y轴滑块最大加速度为amax,输送机构输送钵体盘的速度为v0;取种与补种时间均为T0,延迟时间为Ty(初值为0),补种穴位(x2,y2)之前所用的累计时间为Tn,则完成单次补种总时间T。计算公式如下:
(1)伺服补种机构待补种第1个穴位时,组合吸针需要先到达(0,y1)进行吸种,并携种到达待补种的第1个动态穴位坐标进行补种。设组合吸针从脉冲原点到补完第1个待补种穴的时间为t1,则有
(5)
(6)
(7)

(8)
(9)
当伺服补种机构补完下一待补种穴位时,钵体盘经过输送机构以由原来静态穴位坐标x2变成新的动态穴位坐标
(10)
(3)如果待补种穴位的动态坐标x1≥0,伺服补种机构无法立刻补种,待补穴位未到达伺服补种机构合理补种范围内,需要加上延时时间,设延时时间为t3,则有
(11)
则此时动态待补种穴位位置为
(12)
(4)将组合吸针原点吸针位置变换与动态补种穴位位置整合之后,得到最终每个补种穴位所对应的原点双孔吸针运动的动态补种穴位坐标
(13)
式中f——组合吸针已补种列数
3 试验
3.1 试验材料与设备
试验使用钵体盘穴位规格为23穴×12穴(297 mm×583 mm),钵体育秧土壤选择过筛育秧土,使用杂交水稻种子国稻1号作为试验用种。试验使用 2SJB-500型水稻育秧盘育秧精密播种流水线输送预先完成播种的钵体盘,松下A5系列伺服电机的伺服运动机构实现补种动作,安装有LabVIEW的计算机作为上位机,选用容积流量135 L/min的无油气泵和德国AVT Manta G-201B/C型重工业相机,整体试验系统如图7所示。
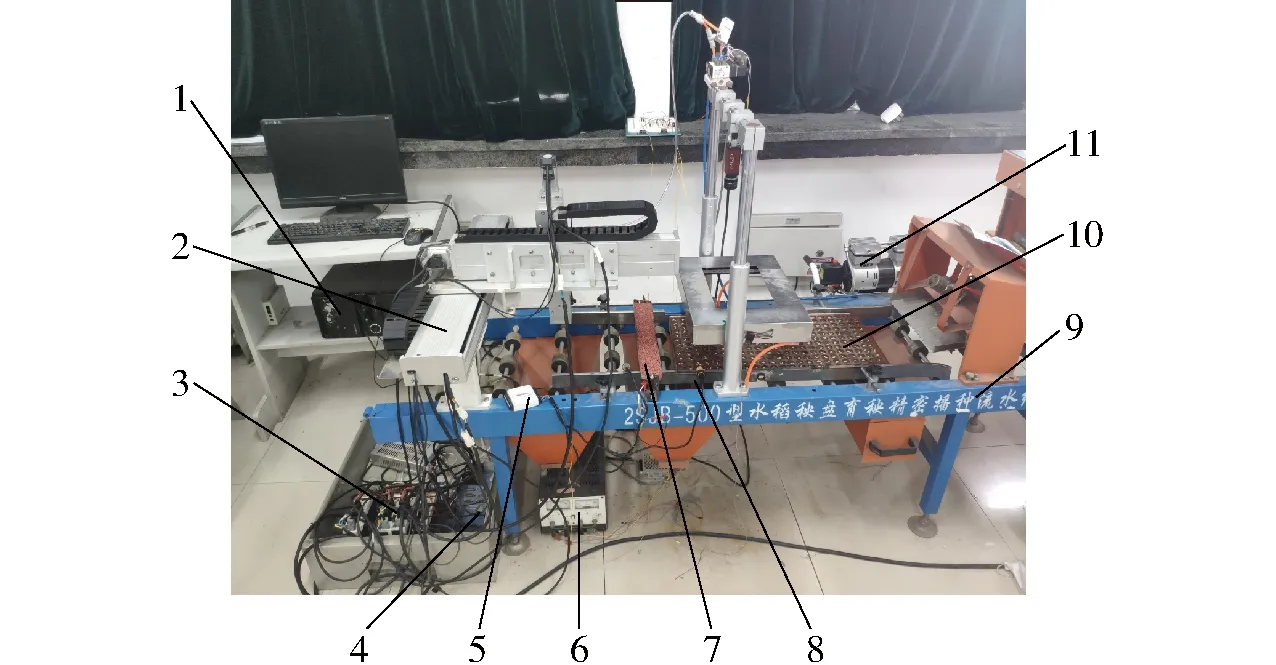
图7 智能补种器整体试验系统Fig.7 Test device for intelligent reseeding1.计算机 2.三轴伺服补种系统 3.驱动器 4.端子板 5.数据采集卡 6.电源 7.补种槽 8.光电传感器 9.试验平台 10.育秧盘 11.气泵
3.2 试验内容与方法
为了实现智能补种系统自动实时检测播种质量,并对所需补种穴位进行自动补种操作,验证智能补种系统对待补穴位的补种精准性和高效性,对水稻钵体盘智能补种系统进行试验调试。将水稻钵体盘补种系统安放在2SJB-500型水稻钵体盘育秧精密播种机播种流水线的播种工序与覆土工序之间,进行补种操作,可以有效弥补水稻钵体盘中存在0粒穴和1粒穴过多的问题,提高播种质量和效率。
试验2中每个水稻钵体盘的待补种率(水稻钵体盘中所有0粒穴数和决策出待补1粒穴数之和)不同,选取补种率为1%、2%、4%、7%的水稻钵体盘进行试验。并分别重复10组试验取平均值,并在补种后观察并统计平均每盘补种时间、每盘补种时间相对误差最大值、生产率,试验结果见表3。
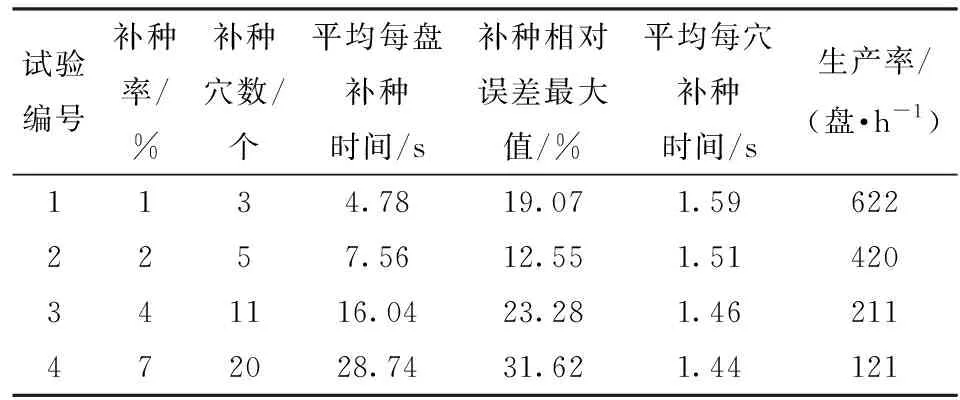
表3 试验结果统计Tab.3 Statistics of test result
试验3目的是证明使用伺服电机和组合吸针的智能补种系统比采用步进电机和活塞杆气缸的补种效率高。步进电机使用日本信浓SST58D4830型两相混合步进电机,气缸采用日本SMC公司的13-MXQ8-75A型双活塞杆气缸,试验中选取补种率为1%、2%、4%、7%的水稻钵体盘分别进行试验,并记录步进电机和伺服电机完成整盘补种的时间,试验结果见图8。
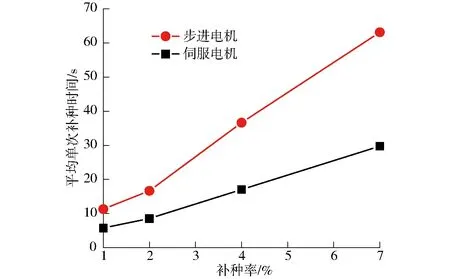
图8 伺服电机与步进电机平均单次补种时间的变化曲线Fig.8 Average single reseeding time of servo motor and stepping motor
3.3 试验结果与分析
表3为不同补种率水稻钵体盘的单盘平均补种统计,由表3可知,当每个钵体盘的补种率为2%时,智能补种系统生产率可以达到420盘/h,平均每盘补种时间7.56 s,平均每穴补种时间可达到1.51 s。平均每穴补种时间随补种率的上升而下降。当补种率为7%时,每个水稻钵体盘中所需待补种穴数为20个,达到组合吸针补种数的上限,平均每穴补种时间达到1.44 s,达到最小每穴补种时间。补种效果又称补种率,受平均每穴补种时间的限制,补种率与生产率有关,即生产率越高,补种率越小,补种效果下降。
同一补种率的水稻钵体盘中待补种穴位位置随机分布,且有很大的差距,智能补种系统的补种行程不尽相同,造成每个水稻钵体盘的补种时间也不相同。补种率为7%,相对补种率1%的补种个数增加,各待补穴位之间距离小,平均每穴的补种时间较少。各待补种穴位的相对位置距离越大,每盘补种时间相对误差最大值越大。
试验3在补种率为1%、2%、4%、7%的4种情况下分别进行试验,由图8可知,使用伺服电机和组合吸针组成的智能补种系统比由步进电机和活塞杆气缸组成的补种系统在整盘补种时间上至少缩短了53.48%。装有步进电机的补种机构,气缸动作时间所占单次补种时间比例过大,导致高于伺服电机单次补种时间。
组合吸针的20个双孔吸针同时吸种,相较于单个吸针补种,节省了每次补种完成后需回到补种槽补种和前往下一待补穴位的时间,可以将整盘补种的时间大大缩减,提高了智能补种系统的工作效率。
4 结论
(1)以2SJB-500型水稻育秧盘育秧精密播种流水线为试验平台,设计了智能补种决策系统,该系统能够满足从实时检测播种质量到自动补种一体化的要求。当水稻钵体盘触发视觉采集传感器时,进行图像采集,并对钵体盘播种质量进行实时检测,并记录种群分布信息。基于卷积计算和路径规划设计了LabVIEW决策补种检测系统,得到空穴和真正待补种1粒穴位,计算出组合吸针原点相对变化的动态脉冲位置,最终由伺服补种机构对待补穴位进行补种。
(2)设计了组合吸针机构,大大缩短了补种时间。对吸种设计参数进行理论计算和试验,证明吸种负压至少为3.5 kPa才能保证吸种性能。在双孔吸针中加入十字挡片和通针结构,解决了吸针易堵和难清理的问题。
(3)当补种率为2%时,平均每盘补种时间7.56 s,平均每穴补种时间可达到1.51 s,智能补种系统生产率可以达到420盘/h。该智能补种机构满足对空穴和1粒穴进行补种、最终达到2~3粒/穴的农艺要求,提高了补种合格率,保证了水稻钵体盘中秧苗的成毯性和成秧率。
