无人集群作战试验设计框架初探
2020-01-25蒋平程志君王博姜江马少维
蒋平 程志君 王博 姜江 马少维
摘 要:无人集群在军事领域的应用刚刚开始,其作战试验更是一个尚待研究的课题。本文从无人集群作战试验的特点分析入手,初步探索了作战试验的设计框架,提出了作战试验的设计流程,包括作战任务分析、评估指标体系构建、影响因素分析、试验活动设计等,为无人集群的作战试验设计提供参考,推进无人集群的实战化应用。
关键词:无人集群;作战试验;设计框架;评估指标体系;试验项目
中图分类号:TJ760; V279
文献标识码:A
文章编号:1673-5048(2020)06-0030-06
0 引 言
装备作战试验是验证和评价新型武器装备作战效能、作战适用性和生存性的试验鉴定活动[1]。具体来讲,装备的作战试验是由独立作战试验机构(通常以参试部队为主)负责,依据武器装备训练与作战任务剖面,在近似于实战的试验环境中,运用多种试验方法手段,对武器装备进行外场试验和评估的过程[2]。装备的作战试验关注的是新装备能否满足作战需求,是装备建设链条上的一个关键环节,是武器装备必须经历的“炼金石”,对于装备的研制验收和形成战斗力起到了把关和推进的作用。因此,作战试验受到了从装备研制部门、总部到装备使用单位的普遍重视。但是,装备的作战试验仍然是一个新课题,如何科学设计和实施作战试验,是迫切需要解决的问题。本文所关注的军用无人集群的作战试验,更是一个全新的领域。
1 无人集群的作战试验
无人集群的概念最初是由无人飞行器(UAV)发展而来。近年来,随着智能技术以及自组网技术的飞速发展,使得众多无人飞行器可以聚合起来形成具备一定智能的共同完成作战使命的系统,发展成为“无人机集群”[3]。现在军用无人集群概念已经发展到无人车、无人艇、无人潜航器等无人作战平台的集群,研究和应用较多的还是无人机集群[4-5]。军用无人集群的特点是:分布式智能协同和高度的人机融合协同[6]。分布式智能协同改变了高技术武器装备发展强调“一机多能”的趋势,把多个先进的功能集成到一个平台上,造成装备的造价昂贵、损失大,而将不同的功能分布到不同的无人平台上,依靠无人平台之间的协作来完成作战任务,具有显著的成本优势和抗损能力;人机高度融合协同改变了传统的作战样式,支持更复杂的作战功能和更高的任务强度,降低作战损失和人员伤亡。美国国防部在2018年发布的《2017-2042无人系统综合路线图》中指出,无人系统的集群能力是确保美军未来利用无人系统作战中获取优势的19项需要近远期发展的关键技术之一[7]。
目前,军用无人集群尚处于试验和发展阶段,国内外都开展了相关的试验。Saliceti[8]在其博士论文中探讨了美国陆、海、空、海岸警卫队等单位的军用无人机作战试验与评估问题。Ervin等[9]介绍了约翰霍普金斯大学在美国海军采办项目办公室资助下的无人潜航器的作战试验与评估。2015年,美国海军研究生院的先进机器人系统工程实验室(Advanced Robotics Systems Engineering Laboratory,ARSENL)首次开展了50架无人机群的自主起飞、飞行和着陆试验[10]。2016年10月,美国海军进一步开展了无人机集群试验,由3架有人驾驶的F18战斗机总共投放103架小型无人机。这些无人机具备组网通信和智能协同的能力,能够自行完成编队集结、目标搜索定位和攻击任务。该项目的目的是对自主导航、自适应编队、有效避撞等集群智能的关键技术进行演示验证[11]。2016年10月,英国海军在苏格兰西海岸组织了“无人战士-2016”大型无人化装备部署演習,出动50部包括无人战机、无人水下潜航器、水面无人艇等无人化装备,开展任务协同和作战测试,完成了海域探索、监控情报收集、人机协同等任务,证明了无人集群可与其他有人作战平台实施协同作战的可行性。2017年6月,中国电子科技集团成功完成了119架小型固定翼无人机集群的飞行试验,成功演示了机群密集弹射起飞、空中集结、多目标分组、编队合围、集群行动等动作 [12]。2018年10月,我国在珠海使用56艘无人艇,首次实现了世界最大规模的水面无人艇群协同演练,完成了快速集结、队形保持、动态任务分配、队形自主变换、协同避障及容错控制等多项测试科目。
现有的无人集群试验主要集中在无人集群的智能感知、信息共享、路径实时规划、自主编队与重构、智能协同决策等关键技术的演示验证,而真正的作战试验尚未开展。原因主要是,目前军用无人集群所依托的无人平台在上述关键技术的实现和融合方面尚未成熟。虽然无人集群作战是一种颠覆性的作战样式,但仍然处于技术探索和发展融合阶段,需要通过各种试验去验证和改进。无人集群的作战试验必然成为其从探索走向成熟的必要环节,有必要根据无人集群作战的特点和关键技术,开展作战试验的设计,推进无人集群的实战化应用。
无人集群作战试验主要涉及两个方面:一是检验无人集群的作战效能;二是检验无人集群的作战适用性。其中,作战效能是指无人集群在规定的作战条件下使用时达到规定使用目标的能力;作战适用性是指无人集群在作战使用过程中能够保持可用的程度,即无人集群在计划的保障资源和保障方案下,在外场使用时能够支持使用者完成规定作战任务的能力。作战效能反映的是无人集群固有特性使其能够完成所赋予的作战任务的能力,作战效能的高低反映装备胜任作战任务的程度,即具备完成作战任务能力的程度;而作战适用性反映的是考虑外界使用条件和保障条件的影响,无人集群能够完成规定作战任务的能力。对这两种能力的检验需要通过无人集群的作战试验项目设计,以指导作战试验的规划、实施和评估。
2 无人集群的作战试验项目设计
无人集群的作战试验项目设计是根据无人集群的特点,按照作战试验的目的和要求,在预定的时间、资源、经费和作战想定内,对作战试验内容、试验评估和试验的实施进行规划设计的活动。无人集群的作战试验项目设计是对无人集群的作战试验的科学规划,通过设计来建立指标体系与作战试验任务、作战试验环境之间的关系[13]。因此,科学设计无人集群的作战试验项目,能够缩短试验周期,提高试验效率,对于推动军用无人集群作战的成熟应用具有重要意义。
无人集群的作战试验项目设计的核心是分析无人集群的作战任务、评估指标体系,以及试验相关影响因素之间的关系,明确试验的安排,做出科学规划。
2.1 作战任务分析
作战任务分析首先要明确作战环境和作战任务。无人机、无人艇等无人集群通常能够承担多样化的作战任务,如无人艇集群可以承担护航、侦察、攻击等多种任务,因此开展作战试验前,首先要明确试验所针对的作战任务。根据任务的需要,综合考虑试验样本量、试验周期、经费、配套设备等多种影响因素,确定试验规模和试验场地,再进一步分析试验是按照任务流程依次展开还是针对重点项目考虑平行开展。然后,需要确定作战任务剖面,任务剖面的制定须参考无人集群的作战想定,最大限度地还原无人集群在作战任务中所经历的事件及环境,任务剖面的描述通常采用任务树分解方法或基于IDEFO方法,目的是将作战任务划分为不同的阶段,便于建立评估指标与各试验阶段对应关系[13]。每个阶段也要明确其试验目的。
2.2 评估指标体系构建
无人集群作战试验评估指标体系的建立,是开展试验项目设计中后续的影响因素分析、试验实施和试验结果评定的基础[13]。因此,需要根据作战任务分析确定的任务剖面,开展系统的结构功能分解,明确参与每个阶段的无人平台具体结构,确定需要评估的关键部分,如在整个任务剖面中比较重要的发动机系统。然后,根据无人集群作战任务和作战保障使用特点,确定每个关键部分的评估指标集合。进一步,因为无人集群是在单个无人平台基础上集成的作战系统,对这个大系统的作战能力评估还要考虑单个平台之间的通信和智能协同能力,以及整个集群的抗毁性等能力,提出系统级的评估指标,将这些指标汇集起来,形成无人集群作战试验的指标体系。由于无人集群作战试验属于比较敏感的话题,也是一个新领域,因此评估指标体系在国内外公开文献中鲜有涉及,如美国海军研究生院的Giles等[14]提到了在设计无人集群时需要考虑生存性、可连接性、可用性、隐蔽性等指标,但是没有介绍如何评价这些指标;国内宋海伟等[15]在总结无人集群电子战系统技术发展时提出,需要开展无人集群电子战系统的仿真和试验评估研究,但是并未介绍试验评估的指标。因此,只能借鉴通用武器装备的作战试验评估指标来研究无人集群的作战试验评估指标体系。指标体系大致可划分为作战效能指标群和作战适用性指标群。评估指标体系的构建需要根据无人集群的特点、作战任务的特点和作战试验目的来确定。武器装备的作战试验评估指标体系一般包括评估作战效能、作战适用性、在役适用性、体系适用性等方面的指标[16]。为叙述方便,这里将适用性指标合并,将无人集群的作战试验评估指标体系分为作战效能指标群和作战适用性指标群。
评估无人集群的作战效能,必须结合装备的特点、具体环境、具体任务和作战试验目的来进行。如针对水下无人集群,作战效能主要包括集群的机动、协同、反潜、反舰、布雷、侦察等。这些效能往往难以直接评估,需要分解为更小的指标,才能通过采集的数据开展评估。如对机动性的评估,需要通过速度、自持力、下潜深度、续航力和操纵性等指标来综合评估。针对协同效能中的定位能力评估,需要通过导航信号的选择和标准定位精度偏差来评估[17]。总之,构造无人集群的作战效能指标群应该能逐层分解到可直接采集数据的层次。
评估无人集群的作战适用性,主要考虑单个无人平台的可靠性、维修性、保障性、测试性、安全性、环境适应性、电磁兼容性等“七性”指标,以及无人集群作为单个平台的集成而需要评估的系统级适用性指标,包括信息共享能力、信息处理能力、电磁兼容性、互操作能力、系统抗毁性等。与作战效能指标类似,作战适用性指标也需要逐层分解到可测量的层次,如单个无人平台的可靠性指标需要分解为平均关键故障间隔时间(MTBCF)、关键部件的平均故障前时间(MTTF)等;维修性指标可分解为平均维修时间(MTTR)、平均预防性维修时间(MPMT)等。
2.3 影响因素分析
作战试验相关的影响因素是指对试验有影响的各种因素,包括不可控因素和可控因素。不可控因素在试验设计中又称为试验条件,是指试验中无法改变的因素,通常由作战试验所选择的作战任务和作战环境决定,如无人机集群在高原山地作战试验的不可控因素包括地形、气压、能见度、气温等。可控因素是指在试验中可以人为调整的因素,每个可控因素通常可以包括多个水平(取值或配置,如弹药、载荷重量)。可控因素是由评估指标体系决定的。如无人机集群在高原山地作战试验中的可控因素包括参试无人机数量、飞行高度、编队方式、传感器类型、载荷配置以及目标大小、目标状态(静止、慢速运动、高速运动)等。影响因素分析的目的是降低不可控因素对试验评估结果的影响,在此基础上,通过映射的方式,建立多个可控因素的多个水平与评估指标之间的定量关系。
2.4 试验活动设計
在上述分析的基础上,设计具体的作战试验活动,就是要确定作战试验的具体项目和阶段划分、试验和评估方法的选定、试验和评估流程的确定等。
2.4.1 作战试验具体项目和阶段划分
根据作战任务分析的结果,结合评估指标体系来确定试验的具体项目,将作战试验项目清单化,即明确需通过作战试验考核的试验项目清单。要做到这一点,需要对作战任务剖面做进一步分析,将试验过程划分为不同的阶段,明确各阶段的试验目标和内容以及检验的指标。同时,将作战试验活动划分为不同的类型,主要有机动性试验、智能协同试验、火力打击试验、目标搜索探测能力试验、指挥控制试验、作战适应性试验等六大类,这样划分的目的是需要根据不同的类型来安排试验资源和制定试验计划。
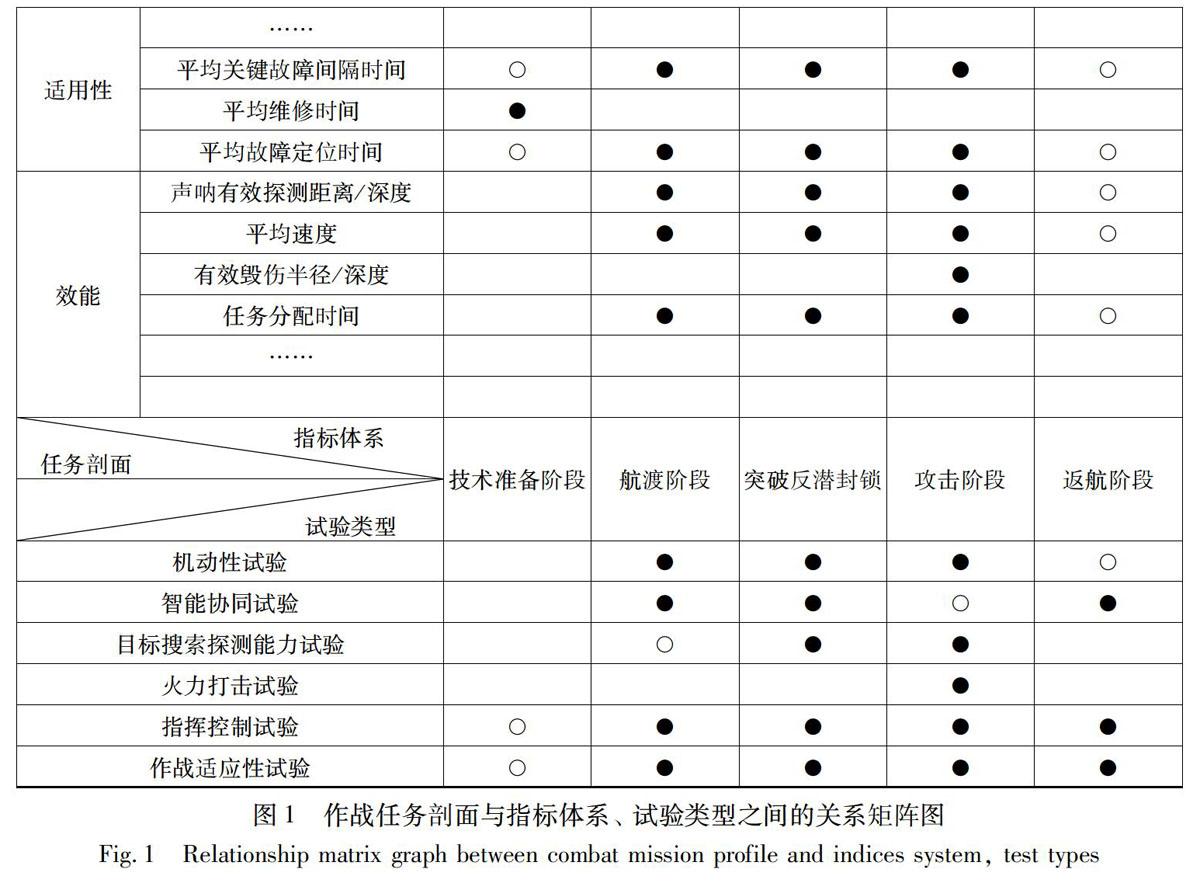
为了列出每个试验阶段需开展的试验类型以及对应各阶段要评估的指标,这里提出通过矩阵图的形式来表现。根据选定的作战任务,将任务剖面作为一个维度,评估指标体系作为另一个维度,列出相关矩阵图,从而确定在每一个任务阶段需要检验的指标,再将不同的试验类型作为一个维度,分析在每一个任务阶段需要开展对应的试验类型,列出矩阵图。由于不同类型的无人平台在指标上差异很大,因此,本文仅以某型水下无人集群的作战试验为例[18],按照上述思路制成一个T型矩阵图,如图1所示。
图中,中间横向的是任务剖面,下侧纵向是试验类型,上侧纵向是指标体系。因此,右下侧矩阵描述的是任务剖面中每个阶段与试验类型之间的关系,右上侧矩阵是描述任务剖面中每个阶段与指标体系之间的关系。由于指标体系一般比较庞大,图中只列出了一部分比较重要的指标。图中,实心圈代表关系非常密切,必须安排相关的指标检验或试验;空心圈代表有一定的关系,在综合任务剖面开展评估时权重较小。
确定的试验项目,还需要在后续的试验方法选择和试验评估流程确定中予以细化,以指导作战试验的准备和实施。
2.4.2 试验和评估方法的选定
根据作战试验每个阶段的试验目的及检验指标,选定适用的试验方法,并统筹安排作战试验数据的采集,建立作战试验类型与采集数据对应的关系矩阵,生成试验数据需求清单。试验方法的选择,还要根据无人集群的特点,以及试验条件来统筹考虑。
传统的试验方法主要有实物试验和仿真试验两大类。目前国内外对无人集群的试验介绍主要是实物试验,但是由于无人集群作战试验是一个新兴领域,目前公开文献中对无人集群试验介绍主要集中在对设计的验证和简单的功能试验,而鲜有介绍作战试验的方法。胡建章等[19]详细介绍了水面无人艇群设计中的系统软硬件架构,试验只是用于验证设计的可行性。Almeida等[20]介绍了葡萄牙空军学院的无人飞行器项目的指挥和控制框架设计,试验是为了检验UAV的基本性能,如拐弯响应和人机交互等。这些试验和评估均未涉及到作战试验,因此,无人集群作战试验没有现成的方法可供参考,需要在现有试验研究的基础上不断地探索和总结。
在无人平台的作战试验中,仿真试验是一类基础和常用的方法,常用于取代实物试验,因为建模仿真可以在任务剖面的任何阶段开展,能节省试验经费和试验时间[3]。仿真试验还可以为实物试验的条件设置提供参考。但是,目前针对无人集群的仿真模型还比较简单,对抗条件下无人集群作战的建模仿真仍是空白,需要开展集中攻关。
在试验方法的基础上,结合需要评估的指标,根据试验数据的情况来选择试验评估方法。如在作战适用性的可靠性指标评估时,根据试验中的样本量和故障数,选择适用于大样本有失效数据背景下的极大似然方法、适用于无失效数据背景下的修正极大似然方法,或者适用于小样本背景下的贝叶斯方法。在选择具体的评估方法时,还可以参考作战使命层次的映射关系、作战任务层次的映射关系、无人装备层次的映射关系,然后确定优先排序、构建计分模型和风险模型等,开展试验评估[21]。
2.4.3 作战试验和评估流程的确定
无人集群的作战试验和评估流程是指为完成无人集群作战试验任务,由试验主管部门、实施单位、保障部门等紧密协作,共同完成试验任务、试验评估的基本过程。作战试验和评估流程的确定,是根据确定的作战试验具体项目和阶段划分,以及选定的试验和评估方法,从操作流程的角度,对试验和评估过程进行详细设计,画出流程的框图。在该流程框图中,明确每一个试验和评估项目的输入、输出、实施的详细条件和对应的方法,如采用质量管理中的过程决策程序图(PDPC),为可能出现的问题制定预案,以便提前进行准备,也可以为后续的流程优化提供输入。
2.5 试验项目的修订
无人集群的作战试验应全面系统考核被试无人集群的作战效能、作战适用性。根据设计框架,针对无人集群的作战任务开展试验设计,可能提出多个候选的试验项目,包括每个阶段的不同试验类型。由于受到试验设施、经费和时间等因素的限制,在实际试验中,被试无人集群的作战试验项目在上述框架确定的流程基础上进行裁剪,只能进行部分试验内容,因此,实际的作战试验仅能检验无人集群的部分作战效能和作战适应性指标。这就需要根据试验任务的重要程度,排列出优先顺序,综合考虑试验类型的优化合并,在原先选定的范围内筛选,确定合适的试验项目。
首先,根据试验目的和试验任务分析,确定作战试验任务的重要程度排序,如某水下无人集群的作战试验任务包括侦察、反潜、布雷等,可以根据研制总要求和不同任务的紧迫性,对试验任务打分,按照反潜、布雷和侦察的重要程度顺序来确定试验任务排序。在此基础上,保留優先度高的指标,优先选择支撑被试装备完成主要任务的考核指标或者上级有明确要求的考核指标。此外,可以剔除优先度低而试验消耗大的试验项目,从而对试验任务的规模和范围进行削减[22]。同时,还可以考虑对不同试验阶段的不同类型试验进行优化合并,如图1中的智能协同试验,原计划在航渡阶段和返航阶段都需要开展,而在实际规划时,从节省经费和时间的角度出发,可以考虑合并在一个阶段开展。经过试验设计人员的详细论证和优化,对原有试验项目进行修订后,形成最终的试验方案。
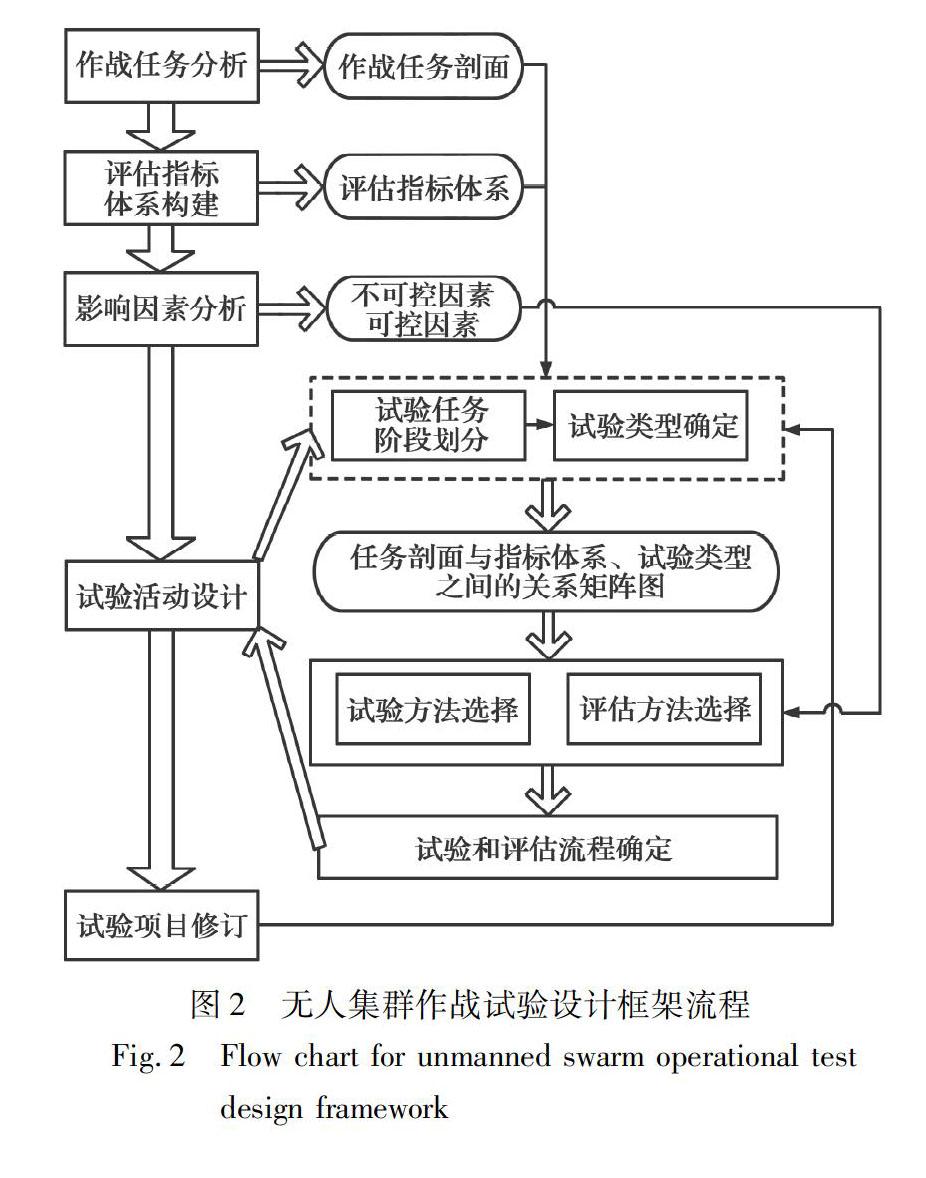
无人集群作战试验设计框架的流程如图2所示。
3 结 论
武器装备的作战试验是一个新的课题,而无人集群的作战试验项目设计更是一个崭新的研究方向。由于无人集群具备状态感知、信息共享、智能协同、自主编队等特点,为了针对特定作战任务,开展作战试验设计,需要在评估指标体系的选取和相关影响因素的分析方面,有针对性地开展研究,这是与传统的试验设计不同的地方,也是与常规的武器装备作战试验有所不同。
本文在分析无人集群作战试验特点的基础上,提出了作战试验项目设计流程,初步探索了无人集群作战试验的设计框架。针对具体无人集群的作战试验,需要根据性能特点和作战任务,开展深入分析,构建适用的指标体系,制定可行的试验项目。
参考文献:
[1] 曹裕华,王元钦. 装备作战试验理论与方法[M]. 北京:国防工业出版社,2016.
Cao Yuhua,Wang Yuanqin. Theory and Methods of Equipment Combat Test[M]. Beijing: National Defense Industry Press,2016. (in Chinese)
[2] 王凱,赵定海,闫耀东,等. 武器装备作战试验[M]. 北京:国防工业出版社,2011.
Wang Kai,Zhao Dinghai,Yan Yaodong,et al. Military Equipment Combat Test[M]. Beijing: National Defense Industry Press,2011. (in Chinese)
[3] 张阳,司光亚,王艳正. 无人集群作战建模与仿真综述[J]. 电子信息对抗技术,2018,33(3):30-36.
Zhang Yang,Si Guangya,Wang Yanzheng. Review on Modeling and Simulation of Unmanned Swarm Operation[J]. Electronic Information Warfare Technology,2018,33(3):30-36. (in Chinese)
[4] Summers B C,Hauser H. Interaction Designs Impact on Knowledge Acquisition with Unmanned Aerial System Teams Performing Complex Tasks[C]∥Proceedings of the Human Factors and Ergonomics SocietyAnnual Meeting,2017.
[5] Tahir A,Bling J,Haghbayan M-H,et al. Swarms of Unmanned Aerial Vehicles:A Survey[J]. Journal of Industrial Information Integration,2019,16: 1-7.
[6] 符文星,郭行,闫杰. 智能无人飞行器技术发展趋势综述[J]. 无人系统技术,2019,2(4):31-37.
Fu Wenxing,Guo Hang,Yan Jie. Overview on the Technology Development Trend of Intelligent Unmanned Aerial Vehicle[J]. Unmanned Systems Technology,2019,2(4):31-37. (in Chinese)
[7] DoD. Unmanned Systems Integrated Roadmap(FY2017- 2042)[R]. 2018.
[8] Saliceti J A. Exploring Operational Test and Evaluation of Unmanned Aircraft Systems: A Qualitative Case Study[D]. San Diego: Northcentral University,2011.
[9] Ervin W P,Madden J P,Pollitt G W. Unmanned Underwater Vehicle Independent Test and Evaluation[J]. Johns Hopkins APL Technical Digest,2014,32(5): 752-761.
[10] Chung T H,Clement M R,Day M A,et al. Live-Fly,Large-Scale Field Experimentation for Large Numbers of Fixed-Wing UAVs[C]∥IEEE International Conference on Robotics and Automation(ICRA),2016: 1-8.
[11] 李风雷,卢昊,宋闯,等. 智能化战争与无人系统技术的发展[J]. 无人系统技术,2018,1(2):14-23.
Li Fenglei,Lu Hao,Song Chuang,et al. Development of Intelligent Warfare and Unmanned System Technology[J]. Unmanned Systems Technology,2018,1(2):14-23. (in Chinese)
[12] 李鹏举,毛鹏军,耿乾,等.无人机集群技术研究现状与趋势[J/OL].航空兵器,2020.DOI:10.12132/ISSN.1673-5048.2019.0218.
Li Pengju,Mao Pengjun,Geng Qian,et al. Research Status and Trend of UAV Swarm Technology[J/OL].Aero Weaponry,2020.DOI:10.12132/ISSN.1673-5048.2019.0218. (in Chinese)
[13] 王金良,郭齐胜,赵东波,等. 武器装备作战试验项目设计方法研究[J]. 装备学院学报,2016,27(3): 129-133.
Wang Jinliang,Guo Qisheng,Zhao Dongbo,et al. Research on Design Method of Operational Test Project of Weapons and Equipments[J]. Journal of Equipment Academy,2016,27(3): 129-133. (in Chinese)
[14] Giles K,Giammarco K. A Mission-Based Architecture for Swarm Unmanned Systems[J]. Systems Engineering,2019,22(3): 271-281.
[15] 宋海伟,田达,李文魁,等. 智能无人集群电子战系统技术发展与研究[J]. 航天电子对抗,2018,34(2): 11-13.
Song Haiwei,Tian Da,Li Wenkui,et al. Development and Study on the Technology of Intelligent Unmanned Swarming System for Electronic Warfare[J]. Aerospace Electronic Warfare,2018,34(2): 11-13. (in Chinese)
[16] 薛益新,周玢. 武器装备作战试验鉴定指标体系建立方法[J]. 装备学院学报,2016,27(4): 102-107.
Xue Yixin,Zhou Bin. Establishment Method of Index System for Weapons and Equipments Operational Test and Evaluation[J]. Journal of Equipment Academy,2016,27(4):102-107. (in Chinese)
[17] Sivaneri V O,Gross J N. Flight-Testing of a Cooperative UGV-to-UAV Strategy for Improved Positioning in Challenging GNSS Environments[J]. Aerospace Science and Technology,2018,82-83: 575-582.
[18] 侯思祥,王锦华. 水下无人作戰平台作战试验任务剖面设计[J]. 数字海洋与水下攻防,2019,2(5): 20-23.
Hou Sixiang,Wang Jinhua. Mission Profile Design of Operational Test for Underwater Unmanned Combat Platform[J]. Digital Ocean & Underwater Warfare,2019,2(5):20-23. (in Chinese)
[19] 胡建章,唐国元,王建军,等. 水面无人艇集群系统研究[J]. 舰船科学技术,2019,41(4): 83-88.
Hu Jianzhang,Tang Guoyuan,Wang Jianjun,et al. Research on Unmanned Surface Vehicle Cluster System[J]. Ship Science and Technology,2019,41(4): 83-88. (in Chinese)
[20] Almeida P,Bencatel R,Goncalves G M,et al. Experimental Results on Command and Control of Unmanned Air Vehicle Systems[C]∥ The 6th IFAC Symposium on Intelligent Autonomous Vehicles,2007.
[21] 王亮. 武器装备作战试验评估方法研究[J]. 装备学院学报,2016,27(2): 117-122.
Wang Liang. Study on the Assessment Method of Weaponry Operational Test[J]. Journal of Equipment Academy,2016,27(2): 117-122. (in Chinese)
[22] 曹裕华,周雯雯,高化猛. 武器装备作战试验内容设计研究[J]. 装备学院学报,2014,25(4): 112-117.
Cao Yuhua,Zhou Wenwen,Gao Huameng. Research on the Content Design of Equipment Operational Test[J]. Journal of Equipment Academy,2014,25(4): 112-117. (in Chinese)
Preliminary Study on Design Framework of
Unmanned Swarm Operational Tests
Jiang Ping 1*,Cheng Zhijun 1,Wang Bo 1,Jiang Jiang1,Ma Shaowei2
(1. College of Systems Engineering,National University of Defense Technology,Changsha 410073,China;
2. Unit 31511 of PLA,Beijing 100144,China)
Abstract: The applications of unmanned swarm have just started in military,and the combat test of unmanned swarm is thus a topic to be further researched. This paper starts from the analysis of characteristics of unmanned swarm operational test,explores the design framework of the operational test,and proposes a design process of operational test which includes operational task analysis,evaluation indices system construction,influence factors analysis,test activities design,and so on. This research provides reference for design of unmanned swarm combat tests,and promotes the field applications of unmanned swarm.
Key words:unmanned swarm; operational test; design framework; evaluation indices system; test item
收稿日期:2020-05-08
基金项目:国防科技大学预研基金项目(ZK17-02-08)
作者简介:蒋平(1976-),男,四川成都人,副教授,博士,研究方向是复杂装备可靠性评估与试验鉴定。
E-mail:jiangping@nudt.edu.cn
