基于多站测距定位的无人直升机自主降落引导方法研究
2020-01-25潘思谷丰狄春雷常彦春杨丽英何玉庆
潘思 谷丰 狄春雷 常彦春 杨丽英 何玉庆

摘 要:无人直升机在船舶等动态平台上的自主降落一直以来是被重点研究且非常具有挑战性的问题。由于船舶受海浪作用产生的六自由度运动以及海上多变的气象条件,整个降落过程对于引导系统的定位准确性和可靠性提出了更高的要求。多站定位技术在飞行器导航领域中应用十分广泛,是开发新型导航系统的重要选择。本文采用超宽带(UWB)无线测距技术,实现基于多站测距定位的无人机导航系统。通过将加权最小二乘定位算法与扩展卡尔曼滤波方法相结合,實现了无人直升机的高准确度动态定位。基于随机海浪模型和实际的海测数据对船舶的六自由度运动进行了模拟,最后对无人直升机在船舶上自主降落的引导过程进行了数值仿真。结果表明,基于UWB的多站测距定位系统能够满足无人直升机在船舶上自主降落的需求。
关键词:多站测距定位;自主降落;加权最小二乘定位法;扩展卡尔曼滤波;随机海浪模型
中图分类号:TJ765; V279
文献标识码:A
文章编号:1673-5048(2020)06-0036-07
0 引 言
无人直升机具备垂直起降、定点悬停和低空低速飞行等空中机动能力,可以实现目标侦察、情报收集、通信中继、火力支持、搜索与救援等战术任务,在现代化海军作战中具有极大的应用需求。为了提高无人直升机的自主化水平,人们在导航、制导和控制这三个主要方面进行了大量的研究工作[1]。自主起降是无人直升机实现舰载一体化首先需要解决的问题,其关键技术之一在于实现无人直升机在起降期间尤其是降落过程中的高准确度、动态定位,即降落引导。
目前,应用于无人直升机自主降落的引导技术主要包括雷达定位系统、惯性导航系统(INS)、全球卫星导航系统(GNSS)、基于视觉的引导[2-5]和以上几种类型的组合导航系统。这些引导技术分别在定位准确性、可靠性、计算复杂度和设备成本等方面有着各自的优缺点。已经成功实现舰载一体化的无人直升机包括美国的MQ-8B火力侦察兵、波音公司“无人小鸟”(ULB)项目研发的H-6U无人机和澳大利亚Schiebel公司研发的海上搜救无人机Camcopter S-100等等。其中,H-6U和S-100无人直升机采用的都是GNSS/INS组合导航系统。以GPS为代表的GNSS是一种典型的多站定位系统,每一颗在轨卫星就是一个不断运动的参考站。多站定位技术历史悠久,在飞行器导航和目标监测领域应用十分广泛。虽然GPS通过差分定位可以将定位准确度提高到厘米级,但是可见卫星数量的变化会使得由GPS得到的位置解出现很大的波动。因此,GPS通常需要与INS进行组合使用。此外,GPS信号十分微弱,且频率固定,容易受到其他电磁信号的干扰。因此,美国海军通常要求以GPS作为导航系统的无人机还需要提供一个备份的导航系统。
多站定位系统定位是否准确的一个决定性因素是测距准确度。随着无线电技术的发展,新型的超宽带(UWB)技术在高准确度定位方面表现出了很大的应用前景。UWB信号的工作频段为3.1~10.6 GHz,这种大的带宽使得UWB信号具有很高的时间分辨率,同时也意味着UWB接收器能够解析单个多径信号分量(MPC),因此,能够准确地估计最短路径信号的到达时间,从而实现精确测距[6]。
近年来,基于UWB测距的多站定位系统在无人机导航和自主着陆方面的应用成为了一个新的研究热点。文献[7]提出了一种用于无人机自动着陆的UWB定位系统设计方法,对无人机着陆过程中该系统的定位准确度进行了仿真分析。文献[8]采用多传感器融合的方法,使得无人机在不同的条件下能够在GPS,IMU和UWB定位系统之间进行无缝切换,实现鲁棒的自主导航飞行。文献[9]则采用IMU,UWB和气压计三种传感器的测量值,通过扩展卡尔曼滤波器进行融合,实现了四旋翼无人机在室内环境的位置和偏航角估计。在文献[10]中,通过在地面车辆上安装的一组UWB节点,实现了无人机在户外特定场景中的跟踪与控制。在文献[11]中,通过在室内、森林和室外三种不同的环境下的飞行试验,验证了UWB测距和定位算法的性能。在文献[12]中,通过UWB测距与通信网络来感知和共享不同无人机之间的距离信息,实现了多无人机的协作相对定位,并将其应用于GPS受限环境中的分布式无人机编队飞行。文献[13-14]根据视觉里程计提供的相对位移和UWB提供的距离测量值,实现旋翼无人机相对于地面无人车在水平面内的位置估计,并通过激光测距仪来实现高度估计,完成了无人机在无人车上的自主降落。在文献[15]中,将UWB与IMU相融合,实现了基于UWB 的定位引导系统,并采用多旋翼无人机和无人直升机进行了飞行起降试验。
当前,基于UWB测距的多站定位在无人机方面的研究,主要在于实现无人机的自主飞行和无人机的自动着陆两个方面,而在动态平台上进行自主降落的研究大多是以地面无人车为研究对象。与静态着陆以及在地面移动平台上进行降落相比,在船舶上进行自主降落时,由于UWB参考节点会随着船舶一起做六自由度的运动,因此情况要更加复杂。本文将采用UWB测距技术,实现基于多站测距定位的无人机导航,对无人直升机在船舶上自主降落的引导过程进行仿真。
1 基于多站测距定位的降落引导系统
1.1 多站测距定位原理
多站定位系统采用传感器网络定位的方式,通常由多个位置已知的参考站点和一个待定位的目标站点组成。本文采用UWB测距与通信模块,每个模块都可以发射和接收UWB信号,并组成一个通信网络,如图1所示。其中,一组UWB参考站点(RN)按照一定的几何布局安装在船舶的降落平台上,其相对坐标已知。UWB目标站点(TN)安装在待定位的无人直升机上。多站定位是一种相对定位,根据RN之间的相对位置关系,可以定义一个导航坐标系,由此可以确定TN在该坐标系下的位置,从而为无人直升机在船舶甲板上的自主降落提供位置引导信息。
根据UWB信号可以获得多种类型的测量值,如信号到达时间(TOA)、信号接收角度(AOA)等。根据所使用的测量值类型的不同,多站定位可以分为多站测距定位和多站测向定位。本文将采用基于TOA的多站测距定位方式。通过双向飞行时间测距技术可以获得TN到每个RN的距离,由此可以得到一组距离测量值。对于二维定位来说,每个距离测量值的几何意义是:TN位于以RN为中心,以该距离测量值为半径的圆周上。多个距离测量值所对应的多个圆周的公共交点就是TN所在的位置。由于测量误差的存在,多个圆周实际上无法交于一点,而是形成一个包含TN真实位置的不确定区域,如图2所示。根据一定的误差准则,可以获得TN的位置估计。这种通过一组距离测量值估计目标位置的方法通常被称为多站测距定位。
1.2 动态位置估计策略
TN与各个RN之间的距离测量值ri可以表示为
ri=cti=di+εi=(x-xi)2+(y-yi)2+(z-zi)2+εi
(i=1,2,…,n) (1)
式中:(xi,yi,zi)为RN的位置;(x,y,z)为TN的位置; di表示TN到各个RN之间的真实距离; ti为TOA估计值; c为UWB信号的传播速度, c=3×108 m/s;εi表示由噪声引起的测距误差; i为RN的个数。在本文中,假设测距误差服从零均值、标准偏差σd=5 cm的高斯分布[7]。
为了求解TN的位置,一般需要将非线性方程组 (1) 轉换为线性方程组。可以先将方程组 (1) 两边平方,再将其他所有RN与其中的一个RN所对应的方程分别相减,从而消除方程组中的非线性项x2,y2,z2。不失一般性,这里选择第一个RN作为公共站点,通过r2k-r21(k=2,3,…,n)变换,可得如下线性方程组:
Mp=N(2)
其中:
M=2x2-x1y2-y1z2-z1x3-x1y3-y1z3-z1xn-x1yn-y1zn-z1;
N=r21-r22+K2-K1r21-r23+K3-K1r21-r2n+Kn-K1;
p=[x,y,z]T;
Ki=x2i+y2i+z2i (i=1,2,…,n)。
最小二乘法(LS)通常被用于解决这类问题[16],该方程组的解为
pLS=(MTM)-1MTN(3)
为了提高求解的准确性,可以通过加权最小二乘法(WLS)来考虑UWB模块测距噪声的影响。该方法的关键在于,通过选择加权矩阵Φ,使目标函数(Mp-N)TΦ-1(Mp-N)最小。由此可得方程组的加权最小二乘解为
pWLS=(MTΦ-1M)-1MTΦ-1N(4)
为了选择合适的加权矩阵,需要对测距噪声进行分析。当测距噪声足够小或信噪比(SNR)足够高时,存在如下的近似关系式[17]:
r2i=(di+εi)2≈d2i+2diεi(5)
因此矩阵N中存在的误差为
ei=r21-r2i+d2i-d21=2(d1ε1-diεi)(6)
其中: i=2,3,…,n。以矢量的形式可以表示为
e=[e1,e2,…,en]T(7)
由于测距噪声是独立分布的,即存在关系式E(εiεj)=0(i≠j),因此,可以得到式(2) 的噪声特性为
Q=E[eeT]=
4d21σ21+d22σ22d21σ21…d21σ21
d21σ21d21σ21+d23σ23…
d21σ21d21σ21…d21σ21
…
d21σ21d21σ21…d21σ21+d2nσ2n (8)
由于Q中包含了各个RN到TN之间的真实距离di,因此Q实际上是未知的。使用距离测量值ri来代替di,可以得到Q的近似表达式。从而,加权矩阵Φ可计算为
Φ≈Q≈
4r21σ21+r22σ22r21σ21…r21σ21r21σ21r21σ21+r23σ23…r21σ21
r21σ21r21σ21…r21σ21
…
r21σ21r21σ21…r21σ21+r2nσ2n(9)
考虑测距噪声的影响,一方面可以提高位置估计的准确性,另一方面还可以提供该位置估计结果的不确定性估计,这对于后续的状态估计来说是十分必要的。通过WLS得到位置估计的协方差矩阵的表达式为
CWLS=(MTΦ-1M)-1 (10)
加权最小二乘定位算法是根据多站测距定位原理,通过UWB传感器获得一组距离测量值直接解算出TN的位置,而没有考虑系统的运动学特性。如果使用该定位算法对动态目标进行跟踪,所得到的位置估计结果往往波动较大,这对于无人机的控制来说是不利的。为了获得更加平滑和准确的位置估计,还需要使用扩展卡尔曼滤波(EKF)等状态估计方法。
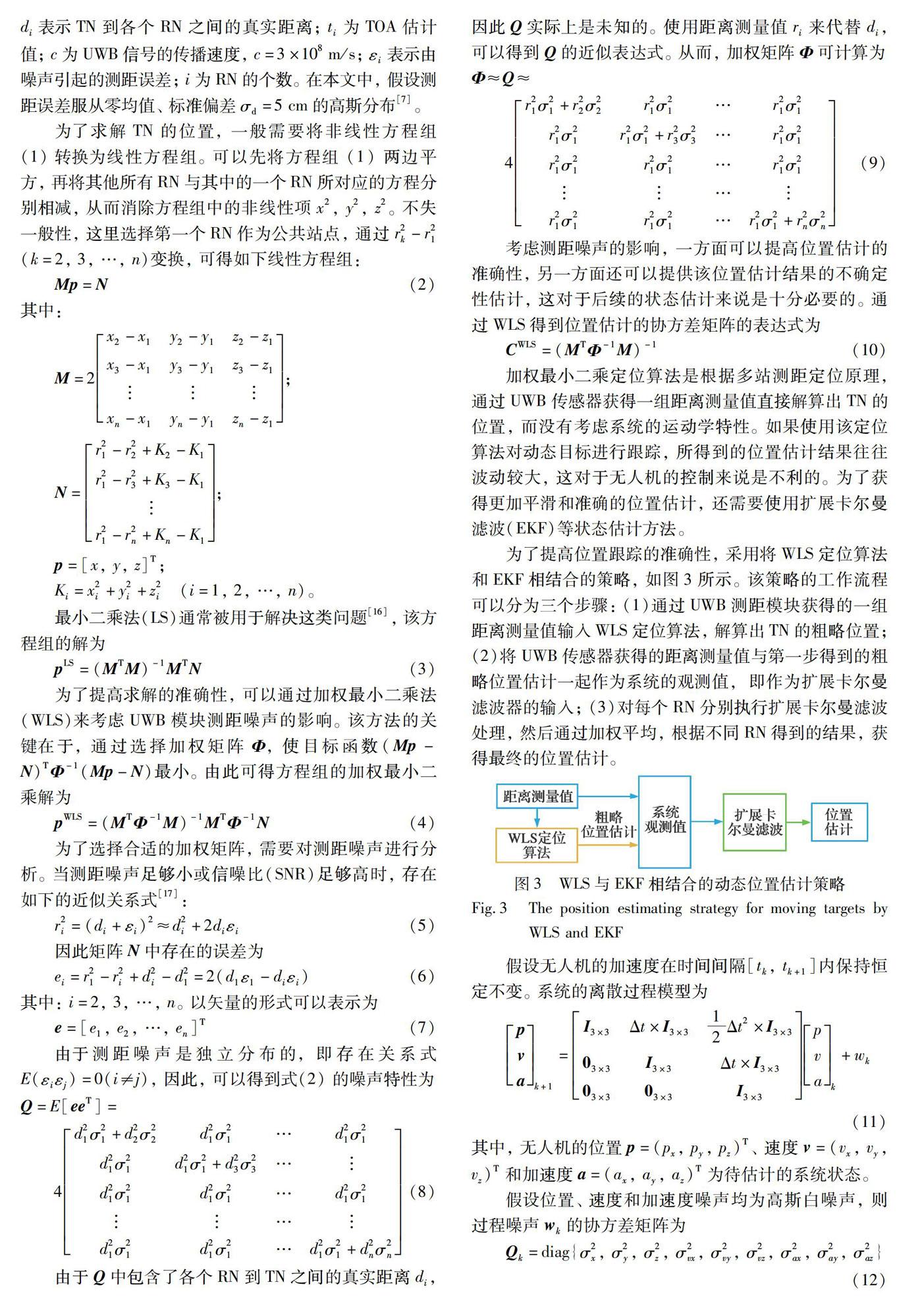
为了提高位置跟踪的准确性,采用将WLS定位算法和EKF相结合的策略,如图3所示。该策略的工作流程可以分为三个步骤:(1)通过UWB测距模块获得的一组距离测量值输入WLS定位算法,解算出TN的粗略位置;(2)将UWB传感器获得的距离测量值与第一步得到的粗略位置估计一起作为系统的观测值,即作为扩
展卡尔曼滤波器的输入;(3)对每个RN分别执行扩展卡尔曼滤波处理,然后通过加权平均,根据不同RN得到的结果,获得最终的位置估计。
假设无人机的加速度在时间间隔[tk,tk+1]内保持恒定不变。系统的离散过程模型为
pvak+1=I3×3Δt×I3×312Δt2×I3×3
03×3I3×3Δt×I3×303×303×3I3×3pvak+wk(11)
其中,无人机的位置p=(px,py,pz)T、速度v=(vx,vy,vz)T和加速度a=(ax,ay,az)T为待估计的系统状态。
假设位置、速度和加速度噪声均为高斯白噪声,则过程噪声wk的协方差矩阵为
Qk=diag{σ2x,σ2y,σ2z,σ2vx,σ2vy,σ2vz,σ2ax,σ2ay,σ2az} (12)
系统的观测值为TN到各个RN之间的距离测量值ri以及由WLS定位算法得到的位置估计pWLS。因此,系统的观测模型可以描述为
rpWLSk+1=p-pRN(pWLSx,pWLSy,pWLSz)Tk+1+nk+1(13)
其中,pRN=(xRN,yRN,zRN)为RN的位置。观测噪声nk+1的协方差矩阵为Rk+1=diag{σ2d,CWLS}。
该系统只有观测模型是非线性的,线性化后得到的观测矩阵为
Hk+1=h(X^-k+1)Xk+1=1r^-k+1(p^-k+1-pRN)T01×6I3×303×6(14)
EKF是一个不断迭代的预测-校正过程。首先根据系统的过程模型,对系统的当前状态X^k和协方差矩阵Pk进行时间更新,即预测阶段,得到系统状态的先验估计X^-k+1和对应的误差协方差矩阵P^-k+1。将系统的状态记为X=[pva]T,则状态转移矩阵A由式 (15) 给出:
X^-k+1=AX^k(15)
P-k+1=APkAT+Qk(16)
然后,根据系统的观测模型和获得的测量值Z=[rpWLS]T,对预测值进行校正,得到后验估计X^k+1和Pk+1:
Kk+1=P-k+1HTk+1(Hk+1P-k+1HTk+1+Rk+1)-1(17)
X^k+1=X^-k+1+Kk+1(Zk+1-h(X^-k+1)) (18)
Pk+1=(I-Kk+1Hk+1)P-k+1(19)
其中,K为卡尔曼增益矩阵。
2 船舶的六自由度运动模拟
2.1 海测数据分析
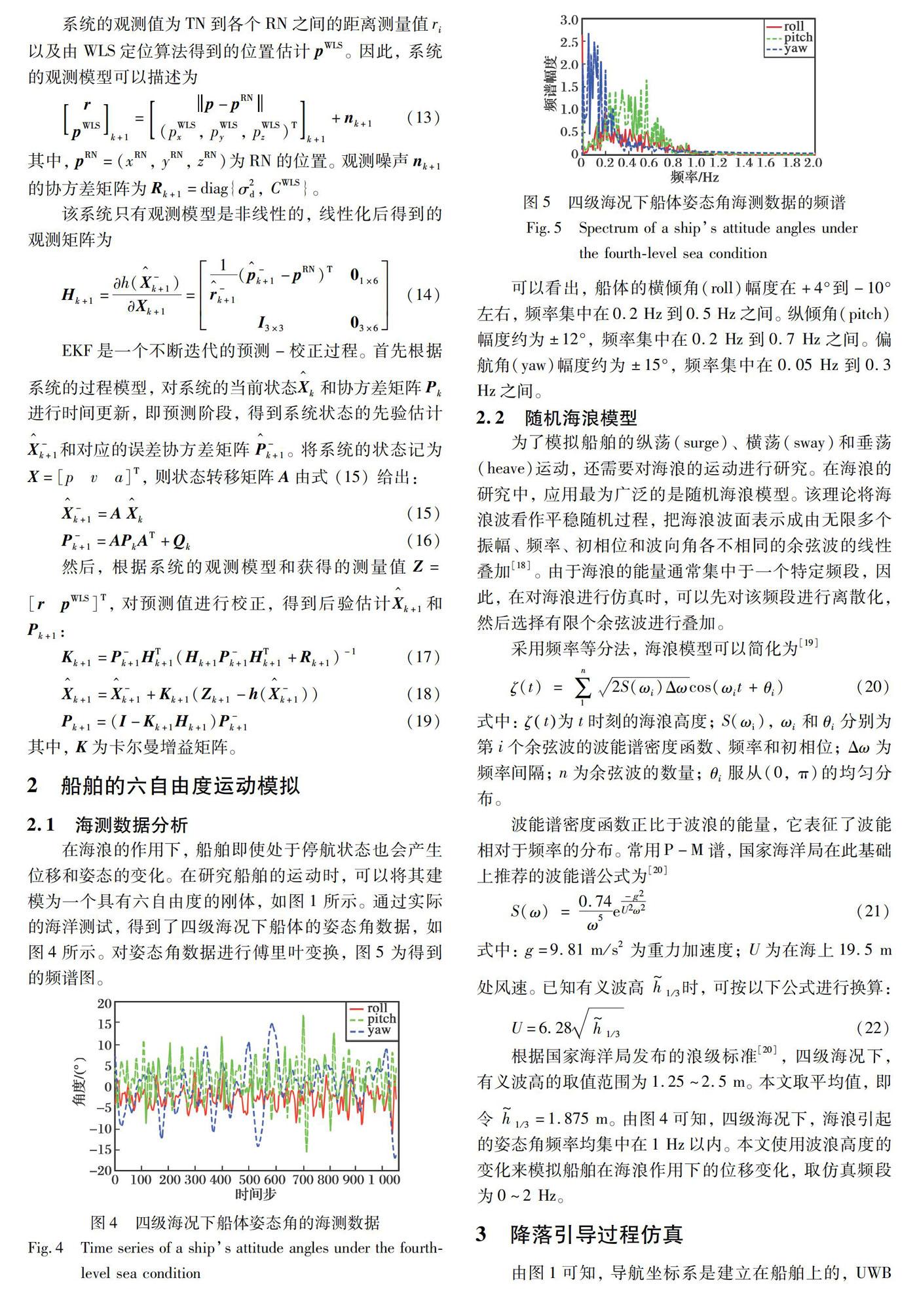
在海浪的作用下,船舶即使处于停航状态也会产生位移和姿态的变化。在研究船舶的运动时,可以将其建模为一个具有六自由度的刚体,如图1所示。通过实际的海洋测试,得到了四级海况下船体的姿态角数据,如图4所示。对姿态角数据进行傅里叶变换,图5为得到的频谱图。
可以看出,船体的横倾角(roll)幅度在+4°到-10°左右,频率集中在0.2 Hz到0.5 Hz之间。纵倾角(pitch)幅度约为±12°,频率集中在0.2 Hz到0.7 Hz之间。偏航角(yaw)幅度约为±15°,频率集中在0.05 Hz到0.3 Hz之间。
2.2 随机海浪模型
为了模拟船舶的纵荡(surge)、横荡(sway)和垂荡(heave)运动,还需要对海浪的运动进行研究。在海浪的研究中,应用最为广泛的是随机海浪模型。该理论将海浪波看作平稳随机过程,把海浪波面表示成由无限多个振幅、频率、初相位和波向角各不相同的余弦波的线性叠加[18]。由于海浪的能量通常集中于一个特定频段,因此,在对海浪进行仿真时,可以先对该频段进行离散化,然后选择有限个余弦波进行叠加。
采用频率等分法,海浪模型可以简化为[19]
ζ(t) =∑n12S(ωi)Δωcos(ωit+θi)(20)
式中:ζt为t时刻的海浪高度;S(ωi),ωi和θi分别为第i个余弦波的波能谱密度函数、频率和初相位;Δω为频率间隔;n为余弦波的数量;θi服从(0,π)的均勻分布。
波能谱密度函数正比于波浪的能量,它表征了波能相对于频率的分布。常用P-M谱,国家海洋局在此基础上推荐的波能谱公式为[20]
S(ω) = 0.74ω5e-g2U2ω2(21)
式中:g=9.81 m/s2为重力加速度;U为在海上19.5 m处风速。已知有义波高h~1/3时,可按以下公式进行换算:
U=6.28h~1/3(22)
根据国家海洋局发布的浪级标准[20],四级海况下,有义波高的取值范围为1.25~2.5 m。本文取平均值,即令h~1/3=1.875 m。由图4可知,四级海况下,海浪引起的姿态角频率均集中在1 Hz以内。本文使用波浪高度的变化来模拟船舶在海浪作用下的位移变化,取仿真频段为0~2 Hz。
3 降落引导过程仿真
由图1可知,导航坐标系是建立在船舶上的,UWB参考站点以及导航坐标系都会随着船舶一起运动。船舶的运动则是通过海测数据以及随机海浪模型进行模拟。在每个仿真时间步,根据无人机和降落平台的位置,通过UWB测距模型可以生成TN与RN之间的距离测量值。通过WLS与EKF相结合的定位算法,估计出无人机相对于降落平台的位置,无人机则根据该引导信息对下一步的运动控制做出决策。整个自主降落的引导过程仿真框图如图6所示。
本文将无人机在船舶上的整个自主降落过程划分为三个阶段:(1)进近阶段。无人机的高度基本不变,水平位置不断靠近降落平台的中心位置。(2)姿态调整阶段。此时无人机已经飞到降落平台的正上方,保持相对位置不变,跟踪降落平台一段时间,等待合适的降落时机。 (3)稳定下降阶段。 保持无人机的水平位置在降落平台的正上方,同时不断地降低无人机的高度,直至完成降落。
无人机的降落轨迹如图7所示。以降落平台的中心位置作为导航坐标系的原点,无人机从(10 m,20 m,15 m)位置处开始出发。降落平台是一个边长为3 m的正方形,四个UWB参考站点布置在降落平台四个角点的上方,距离降落平台的高度分别为0.5 m,1.0 m,0.5 m和1.0 m。图8为降落平台沿坐标轴方向上的位移变化,降落平台的姿态变化见图4。图9为无人机的位置随时间的变化曲线。无人机与降落平台中心位置之间的距离如图10所示。可以看出,在200时间步之前为进近阶段,无人机在水平面上匀速地靠近降落点,高度上保持不变。在200至400时间步内为姿态调整阶段,无人机与降落
点之间的距离基本不变。400时间步以后为稳定下降阶段,无人机的水平位置与降落平台的运动保持同步,但高度上不断下降。在整个降落过程中,无人机的跟踪轨迹与真实轨迹都十分吻合。经过100次的蒙特卡洛仿真,位置跟踪的均方根误差沿x,y,z轴分别为12.54 cm,12.02 cm和9.02 cm。根据美国海军对舰载机的要求[21],水平和垂直定位误差应小于15 cm。由此可知,基于UWB多站测距定位的降落引导系统能够满足无人直升机在船舶等动态平台上进行自主降落的需求。
4 总 结
本文基于多站測距定位技术,对无人直升机在船舶等动态平台上进行自主降落的引导方法进行了研究。首先,通过加权最小二乘定位算法,根据一组距离测量值,实现无人机的位置解算。然后,将定位算法与扩展卡尔曼滤波方法相结合,实现无人机的动态位置估计,不仅平滑了位置估计结果,而且提高了位置跟踪的准确度。其次,根据对四级海况下船体姿态角实测数据的分析,获得了海浪的频谱特性,结合随机海浪模型,实现对船体六个自由度的运动模拟。最后,对无人直升机自主降落的引导过程进行了数值仿真。结果表明,基于UWB多站测距定位的降落引导系统可以实现接近厘米级的定位准确度,能够满足无人直升机在船舶上进行自主降落的需求。
在无人直升机自主降落的过程中,除了需要获得准确的位置引导信息以外,无人机的姿态信息也很重要。在下一步的研究工作中,将采用多传感器融合的方法,研究UWB/IMU组合导航系统,在对无人机进行定位的同时,实现无人机的姿态估计,并进一步提高系统的准确性与可靠性。
参考文献:
[1] Kendoul F. Survey of Advances in Guidance,Navigation,and Control of Unmanned Rotorcraft Systems[J]. Journal of Field Robotics,2012,29(2): 315-378.
[2] Cho A,Kim J,Lee S,et al. Fully Automatic Taxiing,Takeoff and Landing of a UAV only with a Single-Antenna GPS Receiver[C]∥IEEE International Conference on Control,Automation and Systems,2007: 2485-2489.
[3] Falanga D,Zanchettin A,Simovic A,et al. Vision-Based Autonomous Quadrotor Landing on a Moving Platform[C]∥IEEE International Symposium on Safety,Security and Rescue Robotics,2017: 200-207.
[4] Kong W W,Zhou D L,Zhang Y,et al. A Ground-Based Optical System for Autonomous Landing of a Fixed Wing UAV[C]∥International Conference on Intelligent Robots and System,2014: 4797-4804.
[5] Gui Y,Guo P Y,Zhang H L,et al. Airborne Vision-Based Navigation Method for UAV Accuracy Landing Using Infrared Lamps[J]. Journal of Intelligent & Robotic Systems,2013,72(2): 197-218.
[6]Sahinoglu Z,Gezici S,Guvenc I. Ultra Wideband Positioning Systems[M]. New York: Cambridge University Press,2008.
[7] Kim E,Choi D. A UWB Positioning Network Enabling Unmanned Aircraft Systems Auto Land[J]. Aerospace Science and Technology,2016,58: 418-426.
[8] Hausman K,Weiss S,Brockers R,et al. Self-Calibrating Multi-Sensor Fusion with Probabilistic Measurement Validation for Seamless Sensor Switching on a UAV[C]∥IEEE International Conference on Robotics and Automation,2016: 4289-4296.
[9] Strohmeier M,Walter T,Rothe J,et al. Ultra-Wideband Based Pose Estimation for Small Unmanned Aerial Vehicles[J]. IEEE Access,2018,6: 57526-57535.
[10] Lazzari F,Buffi A,Nepa P,et al. Numerical Investigation of an UWB Localization Technique for Unmanned Aerial Vehicles in Outdoor Scenarios[J]. IEEE Sensors Journal,2017,17(9): 2896-2903.
[11] Guo K X,Qiu Z R,Miao C X,et al. Ultra-Wideband-Based Localization for Quadcopter Navigation[J]. Unmanned Systems,2016,4(1): 23-34.
[12] Guo K X,Li X X,Xie L H. Ultra-Wideband and Odometry-Based Cooperative Relative Localization with Application to Multi-UAV Formation Control[J]. IEEE Transactions on Cybernetics,2020,50(6): 2590-2603.
[13] Nguyen T M ,Zaini A H ,Wang C ,et al. Robust Target-Relative Localization with Ultra-Wideband Ranging and Communication[C]∥IEEE International Conference on Robotics and Automation,2018: 2312-2319.
[14] Nguyen T M,Nguyen T H,Cao M Q,et al. Integrated UWB-Vision Approach for Autonomous Docking of UAVs in GPS-Denied Environments[C]∥IEEE International Conference on Robotics and Automation,2019: 9603-9609.
[15] 李宏亮. 基于UWB無线测距的舰载无人直升机起降引导技术研究[D]. 长沙:国防科学技术大学,2015.
Li Hongliang. Research on Taking-Off and Landing Navigation Technology of Shipborne Unmanned Helicopter Based on UWB Wireless Ranging[D]. Changsha: National University of Defense Technology,2015. (in Chinese)
[16] Shen G W,Zetik R,Thoma R S. Performance Comparison of TOA and TDOA Based Location Estimation Algorithms in LOS Environment[C] ∥5th Workshop on Positioning,Navigation and Communication,2008: 77-78.
[17] Cheung K W,So H C,Ma W K,et al. Least Squares Algorithms for Time-of-Arrival-Based Mobile Location[J]. IEEE Transactions on Signal Processing,2004,52(4): 1121-1128.
[18] 郭惜久,程翔. 随机海浪模型仿真[J]. 四川兵工学报,2010,31(8): 134-136.
Guo Xijiu,Cheng Xiang. Simulation of Random Wave Model[J]. Journal of Sichuan Military Engineering,2010,31(8): 134-136. (in Chinese)
[19] 李晓,彭利坤. 风浪条件下六自由度舰船运动模拟器运动仿真[J]. 自动化应用,2017(11): 54-57.
Li Xiao,Peng Likun. Simulation of Ship Motion with Six Degrees of Freedoms at Sea[J]. Automation Application,2017(11): 54-57. (in Chinese)
[20] 李积德. 船舶耐波性[M]. 哈尔滨:哈尔滨工程大学出版社,1992.
Li Jide. Ship Seakeeping[M]. Harbin: Harbin Engineering University Press,1992. (in Chinese)
[21] 周煜,伍逸夫,赵峰. 航母着舰引导系统概述[J]. 舰船电子工程,2011,31(11): 22-24.
Zhou Yu,Wu Yifu,Zhao Feng. A Review of Ship Landing System[J]. Journal of Ship Electronic Engineering,2011,31(11): 22-24. (in Chinese)
Research on Autonomous Landing Navigation of Unmanned Rotorcrafts
on
Moving Ships Based on Multi-Station Ranging and Positioning
Pan Si1,2,3,Gu Feng1,2*,Di Chunlei1,2,Chang Yanchun1,2,Yang Liying1,2,He Yuqing1,2
(1. State Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,China;
2. Institutes for Robotics and Intelligent Manufacturing,Chinese Academy of Sciences,Shenyang 110169,China;
3. University of Chinese Academy of Sciences,Beijing 100492,China)
Abstract: The autonomous landing of unmanned rotorcrafts on a moving ship,which is avery challenging aspect,has been an active research area for a long time. Due to the six degree-of-freedom motion of the ship caused by the wave and the changeable weather conditions at sea,higher requirements for the positioning accuracy and reliability of the navigation system are put forwards during the entire landing process. Multi-station positioning technology is widely used in the field of aircraft navigation,which is an important choice for developing a new navigation system. In this paper,ultra-wideband (UWB) wireless ranging technology is used to develop the navigation system for unmanned rotorcrafts based on multi-station ranging and positioning technique. By using the weighted least square positioning algorithm and the extended Kalman filtering method,the high accuracy positioning of the unmanned rotorcrafts in real time is realized. Based on the stochastic wave model and the real yaw-roll-pitch data of a ship,the six degree-of-freedom motions of the ship are simulated. Finally,the numerical simulation of the autonomous landing of unmanned rotorcrafts on a moving ship is conducted. The results show that this navigation system can meet the requirements of autonomous landing of unmanned rotorcrafts on a moving ship.
Key words: multi-station positioning;autonomous landing;weighted least square positioning algorithm;extended Kalman filter;stochastic wave model
收稿日期:2020-05-25
基金項目:国家自然科学基金重大研究计划(91748130);国家自然科学基金创新研究群体科学基金(61821005);装备发展部共用项目(41412040202);中国科学院轻型动力创新研究院创新引导基金项目(CXYJJ19-ZD-03)
作者简介:潘思(1994-),男,湖北黄冈人,硕士研究生,研究方向是无人机导航。
通讯作者: 谷丰(1982-),男,辽宁沈阳人,副研究员,博士,研究方向是移动机器人技术与系统、多机器人系统协作。
E-mail:fenggu@sia.cn
