超声乳腺肿瘤图像中种子点的自动定位研究
2020-01-18范怀玉马军山刘玉堂杜彩虹
范怀玉,马军山,刘玉堂,杜彩虹
(1.上海理工大学 光电信息与计算机工程学院,上海 200093;2.济宁医学院 医学信息工程学院,山东 日照 276826)
引 言
近年来,乳腺癌已成为世界范围内导致女性死亡的主要原因[1],并且死亡率有逐年上升的趋势。该病最好的预防和治疗方法就是借助于乳腺X射线成像或者乳腺超声等检查工具,对可疑病灶早发现、早治疗。乳腺X射线成像技术被称为乳腺筛查的黄金标准,被广泛应用到乳腺检查中,但是该技术不可避免地存在一个高假阳性率问题。研究者已经发现,经由乳腺X射线成像技术检出的肿块中有超过60%的实为良性肿块[2-3]。同时检测费用较高并有一定的电离辐射。相比而言,乳腺超声因其是一种费用低、非侵袭、可携式以及多用途的检测仪器,在早期的乳腺筛查中被广泛应用[4]。
随着计算机技术的飞速发展和图像处理技术的不断完善,计算机辅助诊断( computer aided diagnosis,CAD)能够帮助医生提高诊断准确率,使得诊断更加高效、实用、智能和自动化[5-6]。在众多超声乳腺图像处理方法中,图像的分割是非常重要的一个关键环节,分割结果不仅能够提供给医生一个更为直观的判断,而且为后续乳腺肿瘤的良恶性判别打下良好基础。但是超声图像噪声斑点多、对比度差、组织间的边界模糊不清等不利因素,使得感兴趣区域(the region of interests,ROI)的分割变得非常困难,经常要借助于专家的手动分割,这不但费时费力,分割结果也依赖专家的经验,也就失去了CAD高效、智能和自动化的初衷。研究人员尝试利用区域增长的方法来自动分割ROI,并取得了不错的结果[7-8]。区域增长自动分割的关键一步就是种子点或者种子区域的选择,如果选择在肿瘤的外面,则分割结果注定是失败的。为防止分割错误,在利用区域增长方法进行分割的时候,大都是提前人工手工选择种子点。为使得超声乳腺肿瘤区域分割完全的自动化,开展一种自动而又准确的种子点(或者区域)选择的研究是很有必要的,目前在这方面开展的工作比较少[9]。文献[10]提出了用灰度共生矩阵特征和游程特征的方法自动地选择肿块的种子点,如果种子点的所有游程特征和它的领域的点相等,则该点就被认作种子点。文献[9]在利用超声图像的灰度信息的同时也利用了图像的空间信息,计算出图像灰度直方图的所有局域最小值,设定阈值从最小的局域最小值开始增大,取出病变部分和背景部分,当目标区域和背景区域的比值大于等于0.1时,阈值不再增大,得到的连通区域在图像中心位置的被认为是种子区域。虽然该方法的真阳性(true positive, TP)率达到了 9 5.24% 的良好结果,但是如果病变出现在图像的其他位置,算法的鲁棒性将会受到影响。本文根据超声肿瘤图像的结构特点和灰度分布,对图像进行不同阈值下的四叉树分解,利用约束条件定位初始目标区域和临时种子区域,当临时种子区域在初始目标区域内时,临时种子区域即为要寻找的种子区域,再对种子区域内的各点的灰度值进行排序,灰度值最小的点被认为是种子点。
1 种子点自动定位原理
1.1 直方图均衡化
因超声医学图像灰度的对比度低、局部细节上没有明显的灰度差别等缺点[11],使得以原始灰度为目标的处理方法较为困难。灰度直方图均衡的图像增强方法常用来对超声医学图像进行增强[12]。其基本思想是把原始图像的直方图变换为均匀分布的形式,增加了像素灰度值的动态范围从而可达到增强图像整体对比度的效果。超声乳腺图像被直方图均衡化后,图像的灰度分布被归一化到[0,1],结果如图1所示。
1.2 迭代四叉树分解方法
正常的乳腺超声图像由浅至深可分五层结构:最外层为皮肤,厚2~3 mm,呈强回声带;第二层为皮下脂肪,呈低回声,其内可见三角形回声,为CooPer韧带声像;第三层为腺体层,厚1.0 cm ± 3.0 cm,呈低回声,其中夹杂有点状及条状回声,为纤维组织、脂肪及导管结构;第四、五层为胸肌及肋间肌,一般易于分辨,呈条状回声[13]。肿瘤在超声图像中一般表现为低回声区,处于腺体层区域。
四叉树数据结构是一种对栅格数据的压缩编码方法[14]。该方法是将一幅图像等分为四个子块,并逐块检查子块的灰度;如果某子块内所有的灰度值小于指定阈值,则这个子块就不再继续等分,否则,该子块继续分解为四个子块,直到每个子块的灰度值均小于指定阈值。在我们运用四叉树方法对乳腺超声图像进行分解之前,先将图像尺寸统一放缩为 5 12×512 ,阈值不同,图像的分解程度不同,图像将会被分解成 2 56×256 、128×128、 6 4×64 、 3 2×32 、 1 6×16 、 8 ×8 、 4 ×4 、2×2、 1 ×1 不同规格大小的子块,子块的规格、数量和位置会因图像的灰度值分布不同而改变。在阈值一定的情况下,因肿瘤内部、第四层和第五层的胸肌及肋间肌都属于低回声区域,该位置的图像灰度值较小,并且灰度值变化相对平缓,规格较大的子块会出现在此区域。而肿瘤边缘和其他区域图像的灰度值较大,且灰度值变化相对剧烈,该区域会出现规格较小的子块。因此定位肿瘤区域就转化为寻找规格最大的子块。
对于不同超声乳腺肿瘤图像,要实现自动定位肿瘤区域进而在其内部定位种子点,如何指定阈值是最为关键的环节。阈值太大,规格最大的子块不只是包含肿瘤区域,为定位种子点带来困难;阈值太小,分解后规格最大的子块有可能不在肿瘤区域。超声乳腺图像被直方图均衡化后,图像的灰度分布被归一化到[0,1],根据最大类间方差法,能求出每幅图像的最佳阈值。由实验结果可以得出,不同图像的最佳阈值不同,但均处于[0.4,0.6]。为了能够准确定位肿瘤区域,必须在此区间选定一个值,通过迭代使阈值动态变化,以满足不同图像定位肿瘤区域的需要。
设阈值为 T =0.5/2n-1(为自然数),算法的流程描述如下。

图1 被均衡图像的灰度变化Fig. 1 The grayscale changes of the equalized images
(3)如果临时种子区域在初始目标区域内,则临时种子区域即为要寻找的种子区域,对种子区域内所有的点的灰度值进行大小排序,灰度值最小的点即为种子点位置。
否则,临时种子区域变为初始目标区域。返回步骤(2)并赋值对图像再次进行四叉树分解,找到临时种子区域。重复步骤(3)。
2 实验与结果
用105幅超声乳腺肿瘤图像(其中包括53幅恶性肿瘤图像和52幅良性肿瘤图像)来检验所提出的算法是否有效,这些图像都经过了组织活检,均证实了其良恶性。所有图像的处理均采用软件MATLAB 2010,计算机的配置为英特尔处理器2.70 GHz和8 G内存。
通过一幅超声乳腺肿瘤图像寻找种子点的过程来进一步说明我们提出的算法流程。
第一次分解,取阈值 T1=0.5 ,分解后图像如图2(a)所示,排除与图像边缘相连的子块,最大子块规格为 6 4×64 ,如图中标示A的子块,将其视为初始目标区域。重新对图像进行第二次分解,阈值变为 T2=0.25 ,分解后图像如图2(b)所示,排除与图像边缘相连的子块后,最大规格子块( 3 2×32 )如图中标示的B、C、D、E和F子块,对这五个子块分别计算其内部所有点的灰度值之和,发现C子块的灰度值之和最小,将其暂定为临时种子区域。但临时种子区域不在初始目标区域内。根据算法流程的步骤(3),将临时种子区域改为初始目标区域,第三次对图像进行重新分解,阈值变为 T3=0.125 ,分解后图像如图2(c)所示,最大子块共有29个,规格为 1 6×16 ,对所有该规格子块(排除与图像边缘相连的子块)分别计算其内部所有点的灰度值之和,发现标示G的子块的最小的灰度值之和最小,将其暂定为临时种子区域。此时G子块处于初始目标区域C子块内,所以G子块被认定为种子区域,对G子块区域内所有的点的灰度值进行大小排序,灰度值最小的点即为种子点位置,如图2(d)标示星号的位置。在软件MATLAB 2010环境下,每次分解后所有子块的位置坐标均能获知,亦即能够得到种子点在图像中的位置。实验结果表明,良性肿瘤图像因形状规则、边界清晰、边缘光滑、内部回声均匀的特点,种子点均能够定位在肿瘤内部,而恶性超声肿瘤图像因形态不规则、边缘呈毛刺状、边缘有浸润、肿瘤内部回声欠均匀、后方回声呈现衰减暗区等特点,使得我们的算法在对恶性肿瘤图像进行种子点的选择时,有六幅图像定位在了肿瘤的外部。本文的方法和文献[9]方法的性能如表1所示。
将种子点定位于肿瘤内部,并且所消耗的时间少,以满足实时在线分割的需求,也是我们设计算法的初衷。从图像预处理到定位种子点整个过程所用时间如表2所示。用单一图像来比较,手动定位更有优势,但是在连续定位多幅图像的种子点时,我们提出的算法更为快捷。
3 结 论
在超声乳腺肿瘤图像中,肿瘤是单一目标,并且肿瘤内部灰度变化较为平缓,肿瘤周围灰度变化较为剧烈。正是利用了图像的这一特征,通过四叉树分解的算法能够得到:在灰度变化剧烈的区域,图像分裂得越厉害,块的规格越小;反之,越是灰度较为均匀的区域,灰度变化平缓,分裂的块的规格越大,从而实现了种子点的自动快速定位。在提出的算法中,要求肿瘤区域与图像边缘不相连接(无论它处在图像的上部还是下部),其实只要是获取超声图像的探头位于肿瘤的正上方,这一要求就能得到满足。通过对种子区域错选在肿瘤区域之外的六幅图像进行分析,我们发现肿瘤的下方均有明显的、呈现衰减暗区的后方回声,对于这种类型的图像,即使种子区域选择在肿瘤内部,因有后方衰减暗区的存在,后续的区域增长也很难将肿瘤分割出来。这既是我们的算法的不足之处,也是我们下一步努力改进的方向。
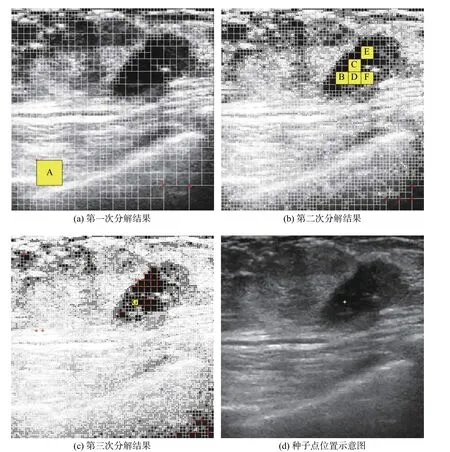
图2 定位种子点的流程示意图Fig. 2 The process diagram of locating the seed

表1 算法的性能Tab. 1 Performance of the method

表2 定位图像种子点各阶段所消耗的时间Tab. 2 The consuming time in the stages for locating the seed piont in images
