基于高精度激光断面高程的沥青路面MTD测量
2020-01-16丁世海阳恩慧王郴平
丁世海 战 友 阳恩慧 王郴平
(1西南交通大学土木工程学院, 成都 610031)(2西南交通大学道路工程四川省重点实验室, 成都 610031)(3School of Civil and Environmental Engineering, Oklahoma State University, Stillwater 74078, USA)
道路交通事故与路面表面抗滑性能密切相关.路面纹理构造影响路面抗滑性能,路面构造深度(MTD)是路面宏观纹理的重要指标之一[1].有效的MTD有助于路面排水,防止水滑现象发生.因此,对沥青路面MTD进行测量具有重要意义.
现有构造深度测量方法主要包括体积法和激光法[2-3].铺砂法是最常用的体积测试法,通过铺砂体积与铺砂区域面积的比值获取路面构造深度.铺砂法测试简单,但测试过程中受人为影响因素较大,测试效率较低,测试结果的稳定性和可重复性较差.随着三维激光扫描技术[4-5]和数字图像处理技术[6]的快速发展,通过道路表面超高分辨率三维图像数据测试MTD成为可能,有望克服传统测量方法的不足.周兴林等[7]基于三角法测量原理建立激光视觉三维数学模型,采用图像处理方法,通过断面构造深度(MPD)估算MTD.冯兴乐等[8]基于激光视觉测量方法获得沥青路面点云数据,通过研究轮胎和路面接触摩擦的几何结构和抗滑机理,修正路面数据点,并采用断面法估算MTD.窦光武[9]提出采用高精度激光测距传感器作为主标准器,利用相对运用原理,实现路面构造深度的非接触式测量.Cui等[10]提出了一种基于多线激光和双目视觉技术的沥青路面平均纹理深度的测量方法.Hong等[11]制备了一种新开发的具有3D激光扫描技术的宏观纹理测量系统,用于实现三维宏观纹理测量.Gendy等[12]构建了一种用于恢复路面表面纹理的四光源光度立体系统,可显示路面表面高度轮廓并估算平均轮廓深度.
目前,构造深度的自动测量多采用激光法.激光法通常采用激光构造深度仪,通过获取路面平均断面深度MPD值来推算路面平均构造深度MTD值.激光构造深度仪只能获取少量路面断面高程轮廓线数据,样本数据点少,不能真实反映路面构造信息.
本文采用高精度三维激光扫描设备来获取丰富的路面纹理数据,借助数字图像处理技术和蒙特卡洛期望法,提出了一种基于沥青路面断面高程轮廓的构造深度测量方法.
1 三维激光成像技术
三维激光成像技术采用激光三角法测量原理,其采集单元为线激光和相机组成的激光-相机组件[13].目前,道路工程中主要采用直射式激光三角法(见图1),其原理为:线激光器发出的激光垂直投射于待测沥青道路表面,面阵CCD相机以特定倾角斜向捕获激光图像.采集单元中激光器和相机保持相对静止状态,由机械传动装置带动采集单元沿采集方向移动,编码器触发相机采集激光所在的横断面数据(见图2).随着采集单元的移动,采集系统可获取该检测区域路面三维高程数据.

图1 直射式激光三角法

(a) 图像采集过程
(b) 断面数据点
2 纹理数据采集
2.1 测试试件
成型AC-13、SMA-13、OGFC三种级配类型的车辙板(见图3),试件尺寸为300 mm×300 mm×50 mm,每种级配类型分别成型3块车辙板,用于后续试验.AC-13、SMA-13、OGFC级配沥青混合料均取最佳沥青用量,级配见表1.

表1 沥青混合料级配 %

(a) AC-13

(b) SMA-13

(c) OGFC
图3 车辙板
2.2 采集系统
LS-40便携式路面表面分析仪是一种路面纹理数据采集与分析仪器(见图4).其内置采集单位为线激光和相机组成的激光-相机组件.通过电池驱动,内置的马达工作台使采集单元按一定速率移动,投射到路面的线激光扫描选定区域,通过激光三角法原理实现路面表面的数据采集,其结果显示为数值数据和二维/三维显示.LS-40系统扫描的范围为102 mm×115 mm的区域,能够采集路面高精度三维纹理数据,其横向分辨率为0.05 mm,纵向分辨率为0.01 mm.原始数据由强度数据阵列和范围数据阵列组成,每个阵列包含总共2 448×2 048 个16 bit数据.采集数据过程中不受环境光源影响,实验室车辙板和现场路面皆可进行数据采集.

图4 LS-40软件数据采集系统
3 基于高精度激光断面高程的MTD求解
通过高精度激光断面高程求解MTD的步骤为:① 通过图像处理提取纹理断面高程轮廓线;② 借助蒙特卡洛期望法的方法原理计算求解MTD.
3.1 纹理断面高程轮廓线提取
LS-40系统采集路面纹理数据的过程是通过三维相机读取投射在被扫描物体表面的激光线高程信息,并以数字图像的形式输入计算机进行处理和存档.数码相机的工作条件受传感器工作状态、仪器振动等因素干扰,由于激光器发射的线激光强度不均、被测沥青路面含有油渍,数码相机在图像获取、数据传输、信息输出等情况下会产生噪声,影响路面纹理断面高程轮廓线的提取精度.较高精度的断面高程轮廓线是保证后续MTD计算精度的基础.因此,需要对原始数字图像进行预处理,抑制噪声信号.
在去除噪声信号的同时,应尽可能减少非噪声点特征信息的丢失.LS-40系统通过三维测量技术获取大规模离散数据,基于点云离散数据的光顺算法能够有效去除噪声的干扰.其中,平均曲率流光顺算法[14]能有效去除噪声,同时较好地处理沥青路面表面的细节特征,达到光顺目的,并保持断面高程轮廓和特征点不变.
借助MATLAB平台,导入LS-40采集的原始路面纹理数据,采用数字图像处理技术提取路面纹理断面高程轮廓线.本文随机提取1条根据原始数据形成的断面高程轮廓线(见图5).由图可知,断面高程轮廓线中有大量针刺和毛刺现象,说明原始路面纹理数据中存在少量孤立噪声和大量毛刺噪声.因此,要提取较高精度的断面高程轮廓线,需要去除路面纹理高程信息噪声.

图5 原始纹理断面高程轮廓线
为了完整地保留路面纹理高程信息,采取平均曲率流光顺算法去除图5中原始断面高程轮廓线中的噪声,结果见图6.由图可知,孤点噪声和毛刺噪声已被消除,同时,纹理断面高程轮廓线基本不变,细节特征(即微观构造)依旧清晰可见.由此说明平均曲率流光顺算法具有较好的噪声抑制效果,并能够保证非噪声特征信息的完整性.为验证去噪算法的稳定性,进行了大量断面高程轮廓线去噪处理,结果显示该算法的去噪效果较好.因此,本文采用平均曲率流光顺算法抑制噪声.
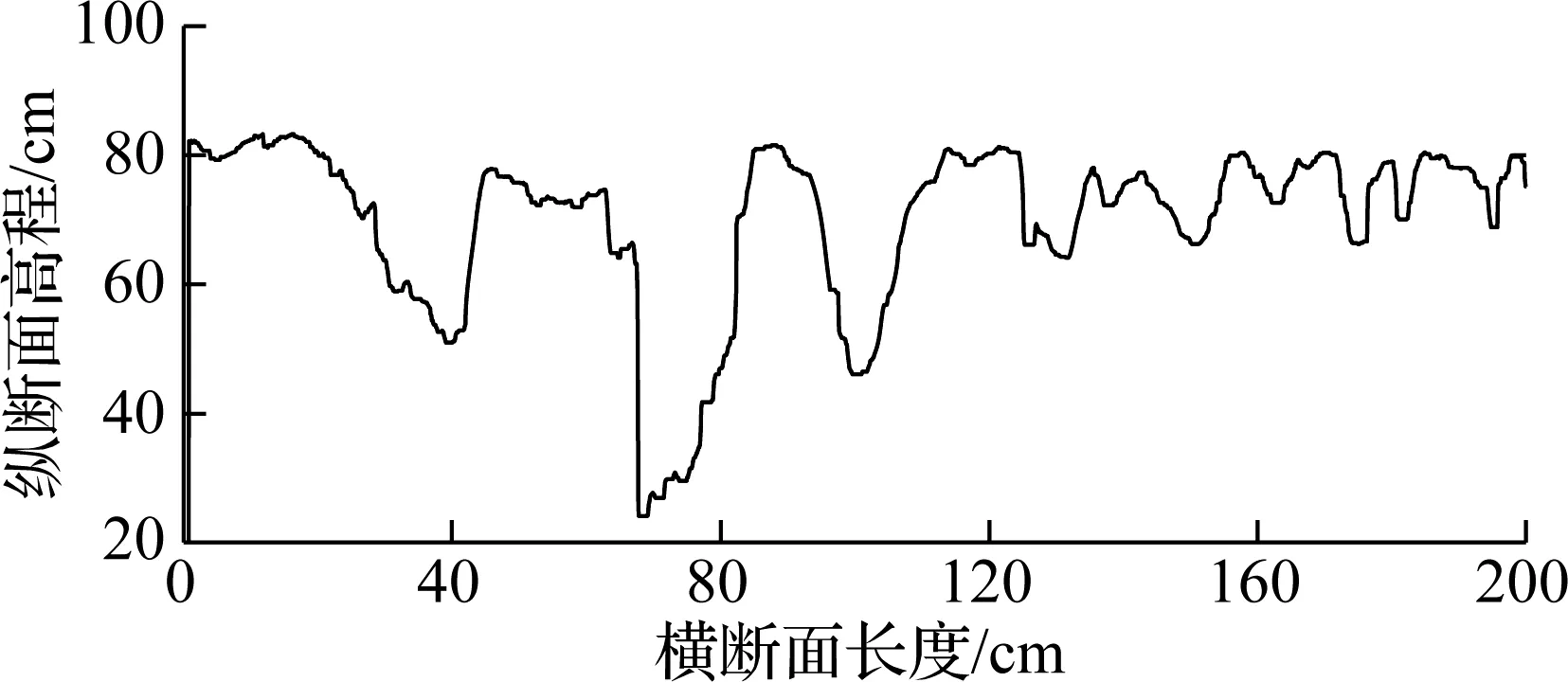
图6 滤波后纹理断面高程轮廓线
3.2 蒙特卡洛期望法
蒙特卡洛期望法是以概率统计理论为指导的数值计算方法,其重要应用是求定积分,即求区间[a,b]曲线下方的面积.在区间[a,b]之间随机取一点x时,可得该点的函数值f(x),然后用f(x)(b-a)粗略估计曲线下方面积.当[a,b]之间取一系列点xi时(xi满足均匀分布),将估算的面积取平均值,作为积分估计的近似值.随着采样点的增多,积分的估计值逐渐接近真实值.
按照蒙特卡洛积分思路,可以计算出所求区间曲线下方的面积S为
(1)
式中,N为采样点数量.
3.3 MTD计算
基于数字图像处理后的断面高程轮廓,通过蒙特卡洛期望法建立数学模型,可以快速准确地求出沥青路面断面高程轮廓面积,进而求解出MTD.以第1断面高程轮廓为例(见图7),MTD求解步骤如下:
① 根据LS-40数据采集精度,确定D、C点之间的高程点数目N,通过蒙特卡洛期望法计算图7中黑色区域面积Shq,即
(2)
式中,f(xi)为纹理断面横坐标xi处对应的高程值.
② 以断面j轮廓线为例,通过计算该断面四边形ABCD与黑色区域的面积差值,便获得断面高程轮廓面积Sjd及其MTD值GjMTD,即
Sjd=SjABCD-Sjhq
(3)
式中,SjABCD为断面j的四边形ABCD面积;Sjhq为断面j的黑色区域面积.
③ 依次计算所有轮廓断面MTD值.所有断面的MTD均值便是该测量沥青路面区域的MTD值,即
(4)

图7 断面高程轮廓面积求解示意图
式中,M为断面高程轮廓线计算个数.
其中,步骤②中直线AB的确定是计算面积SjABCD的关键.首先,选取一定水平距离的纹理断面,将其断面基准线平分为左右2个基准线,找出左右两侧基准线上各自最大值VMAX1、VMAX2,且选取最大值尽量靠近外侧的情况,连接VMAX1和VMAX2,确定直线AB(见图8).LS-40系统扫描的纹理断面横向长度约102 mm,本文提取数十条横向断面高程轮廓线进行对比,发现水平距离为40~60 mm的纹理基本符合直线AB的确定规则.根据水平距离0~40、40~60、60~102 mm三个范围分别对提取的横向断面高程轮廓线进行细分,然后计算2条相似横向断面高程轮廓线形成的断面四边形面积SjABCD.结果显示,水平距离为0~40和60~102 mm时,两者的SjABCD值偏差较大;水平距离为40~60 mm时,两者的SjABCD值较为接近.因此,选择水平距离为40~60 mm的纹理确定直线AB更为合理.计算横向断面高程轮廓线形成的断面四边形面积SjABCD发现,依据水平距离为0~40 mm时计算的SjABCD值较水平距离为40~60 mm时偏小,最终导致MTD值偏小;依据水平距离为60~102 mm时计算的SjABCD值较水平距离为40~60 mm时偏大,最终导致MTD值偏大.
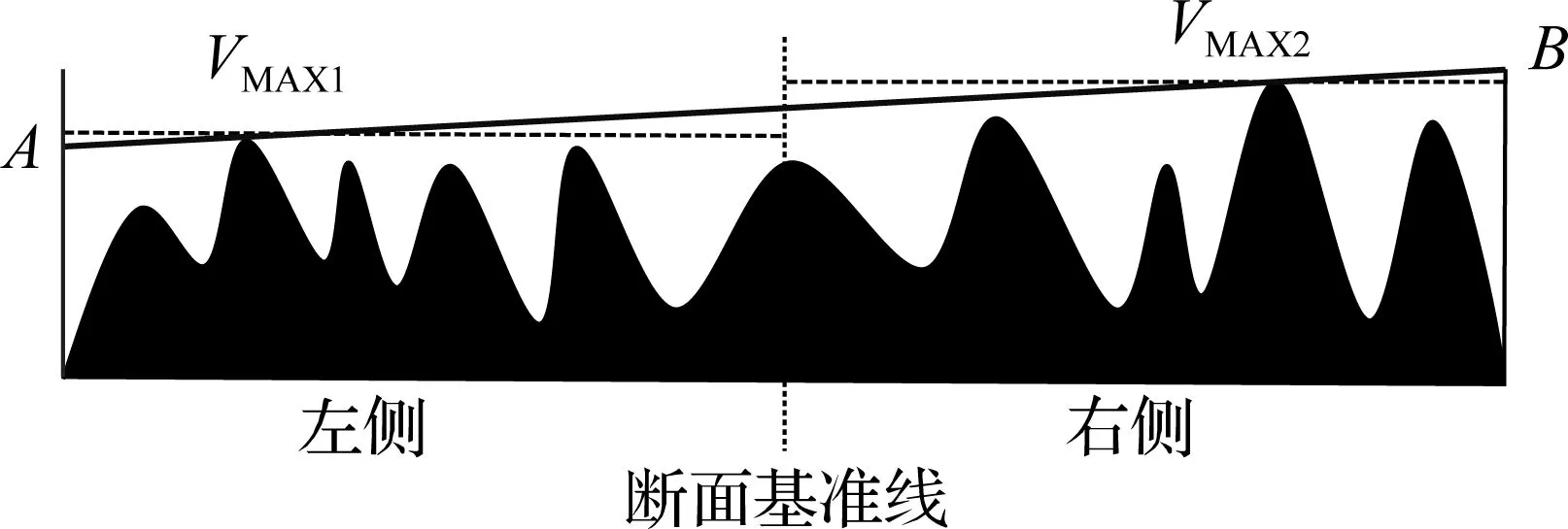
图8 直线AB确定示意图
4 结果与分析
4.1 结果验证
为验证基于三维激光亚毫米精度的沥青路面MTD测量方法的精度和普适性,选取AC-13、SMA-13、OGFC三种级配类型的车辙板,采用传统的铺砂法和LS-40软件分别对同一沥青路面区域进行数据采集,测量出路面构造深度值,计算出两者之间的相对误差δ,即
(5)
式中,X、Y分别为铺砂法和本文方法测量所得的MTD值.
同时,在同一区域采用摆式摩擦仪测定沥青路面的抗滑值,计算其与铺砂法构造深度和本文方法构造深度之间的相关系数,即
(6)

3种类型车辙板各试件构造深度和抗滑值测量结果见表2.抗滑值为换算成标准温度20 ℃时的摆值T20.
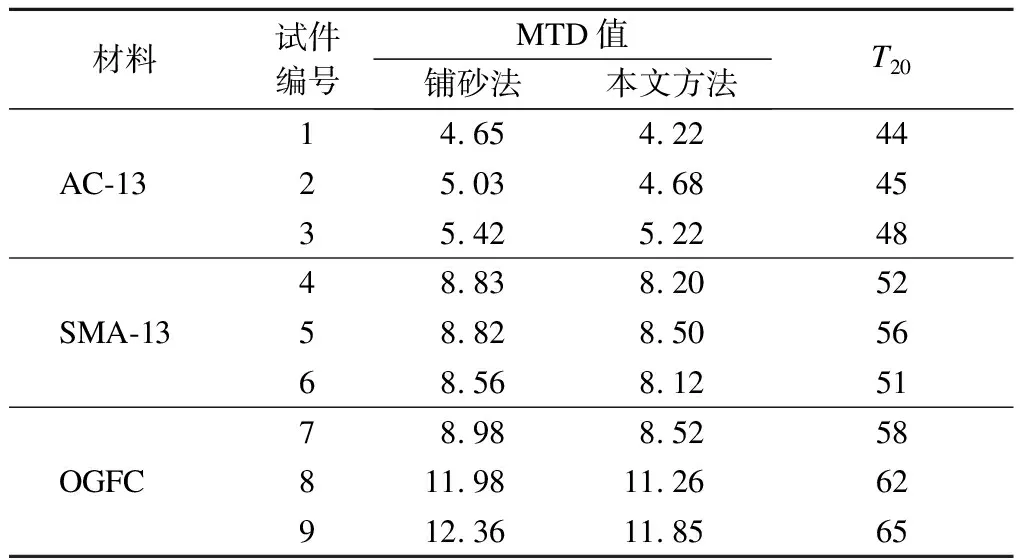
表2 铺砂法和本文方法结果对比
将试验数据代入式(5)和(6),对比本文方法与铺砂法,可计算出3种类型车辙板构造深度值的相对误差值以及MTD值与T20的相关系数,结果见表3.

表3 试验数据分析结果
注:I为X与T20的相关系数;J为Y与T20的相关系数.
通过上述试验数据分析结果可知,不同级配混合料沥青混凝土AC-13、SMA-13、OGFC的构造深度的相对误差值分别为6.63%、4.85%、5.09%.本文方法检测的MTD值与抗滑值T20的相关系数高达0.97.结果表明,基于三维激光亚毫米精度测量沥青路面构造深度方法适用于各种类型沥青路面,且MTD自动测量结果和铺砂法一样,与路面抗滑值具有高相关性.
4.2 结果比对
目前,研究人员利用激光断面数据或表面三维纹理数据估算MTD的方法主要有激光法[7]和平面拟合算法[15].激光法通过激光视觉获得沥青路面断面光条,并计算激光光条线所在断面MPD,建立MPD与MTD的线性关系式,进而估算MTD,其相关系数的确定采用统计学回归方法,根据经验总结而得,不同学者采用不同的相关系数值.平面拟合算法通过三维扫描系统获取路面三维高度数据,对高度数据矩阵进行拟合,确定对应位置的高度值矩阵,两者相减取绝对值获得差值矩阵,对差值矩阵进行均值处理,最终获得MTD值,其高度数据拟合精度影响最终MTD值.本文采用车辙板OGFC试验数据,对不同方法进行比对分析.结果显示,本文方法估算的MTD相对误差值为5.09%,激光法、平面拟合算法估算的MTD相对误差值分别为6.34%、5.86%,由此表明本文方法估算的MTD值与铺砂法检测值更为接近,优于另外2种算法.
5 结论
1) 针对常用沥青路面构造深度测量方法阻碍交通、精度受人为操作影响以及测量设备采集样本数据点少等问题,本文采用三维激光技术,提出了一种基于亚毫米精度测量沥青路面构造深度的方法.
2) 基于高精度三维纹理数据,通过数字图像处理技术,提取沥青路面断面高程轮廓线,结合蒙特卡洛期望法的思想设计算法,完成沥青路面平均构造深度(MTD)的自动测量.
3) 针对不同级配沥青路面,基于亚毫米精度测量法与铺砂法两者测得的MTD结果较为接近.试验结果进一步证明,运用三维激光技术可以实现路面纹理的非接触检测,用于路面抗滑性能智能化评价.
