与新手浅谈上汽大众车型的自动泊车辅助系统(下)
2020-01-13陈中泽
陈中泽

PLAl.5版本对系统传感器的布置,要求前后部各有4个用于驻车距离监控的PDC驻车辅助超声波传感器。此外前部还有2个用于停车位测量的PLA转向辅助超声波传感器,即左前转向辅助传感器G568与右前转向辅助传感器G569,安装在前保险杠外侧。它们输出的信号为转向辅助功能服务,用于测量可用的停车位,在泊车过程中监测与旁边停泊车辆或障碍物的侧边距离。
传感器工作时,薄膜振动发射超声波,通过检测被测障碍物反射回返声波的时间计算与判定距离(图11)。
前保险杠上的PDC传感器从右到左依次是G252、G253、G254与G255,中间2个传感器探测范围是120 cm,其余为60 cm。后保险杠上的PDC传感器从左到右分别是传感器G203、G204、G205與G206,中间2个传感器探测范围是160 cm,其余为60 cm。前后PDC的连续报警区均为30 cm。信号被用来控制泊车距离,传感器的布局使信号覆盖范围产生一定的重叠,故不存在任何障碍物的探测死角。
PLA2.O在系统硬件上增加了PLA侧面超声波传感器G716与G717,安装于后保险杠外侧(图12),探测范围60 cm。信号用于测量垂直停车位的实际宽度和位置,监测与侧边障碍物的距离,对车辆处于垂直停车位中央位置的校正。校正垂直停车位中央位置的目的,是让车辆停在车位的正中间。
控制单元通过前后蜂鸣器发出与距离有关的声音信号,驾驶员根据声音信号的时间间隔可以获悉车辆入位时,车辆与障碍物的距离。
PLA3.0系统在硬件上的要求与2.0版本相同(图13)。
对PLA传感器而言,一个传感器信号失效,将无法使用自动泊车功能。而PDC传感器中的一个损坏,会导致整个系统失灵,导航系统或收音机显示屏将不再显示与PDC相应的OPS图像。
系统故障时,会通过闪烁转向辅助指示灯K241或驻车辅助指示灯K136来加以提示。
三、PLA系统的控制原理分析
停车位的测量及后续的驻车过程受环境条件的影响。例如,系统不能识别停车位内的小物体、窨井盖、凹陷或松散的路肩以及不明确的道路边缘。
超声波传感器的物理特性会对系统的识别引起干扰。例如传感器脏污,传感器膜片上存在水滴,雨雪令传感器表面积雪、结冰、大风或强风等天气原因。
落叶、垃圾或积雪使人行道边沿模糊不清,增加了系统辨识难度。落叶和积雪使超声波信号在反射时发散,系统接收不到回声波,从而导致错误解析。
系统另一个局限性的示例是在岔路口或建筑物入口处,系统可能会将其识别为理想的停车位。在这种情况下,必须人为判断系统识别到的停车地点是否为一个车位。
下面以新帕萨特蓝驱版轿车为例分析PLA2.0系统电路。
具有3个插接器接口的自动泊车控制单元J791安装在仪表板左侧车身控制单元BCM支架上(图14),3个插接器依次是T16g(棕色)、T12a(棕色)与T12p(黑色)。
根究新帕萨特蓝驱版轿车PLA2.0的电路图(图15),自动泊车控制单元J791的电源电路中,没有出现KL30接线柱的常电源输入端。这表明系统工作仅需KL15接线柱端的供电,其路径为总线端KL15继电器J329-熔丝SC4(了.5 A)-节点B280-J791的T16g/l端子。J791的搭铁端子为T16g/8,搭铁点为617,在右侧A柱下部。
J791的T16g/6端子是倒车灯信号的输入端,是PLA自动泊车模式或PDC距离监控的起始信号,系统由此进入工作。J519的T52 b/51端子是灯光照明58d电源输出端。前部蜂鸣器H22与后部蜂鸣器H15分别连接在T12a与T16g插接器上,用于距离监控报警提示。
带有指示灯K241的PLA按钮E581与带有指示灯K136的PDC按钮E266布置在换挡杆左侧中央过道上(图16)。
由图17可知,E581与E266均为6端子的点动型开关体;内部结构完全相同。按下E266,J791的T16g/4端子的电位降低至0 V,T16g/13端子输出12V电压,开启PDC辅助指示灯K136,提示PDC功能已开通。同理,按动E581,PLA指示灯K241点亮,J791根据其T16g/16端子的电位变化情况,可以获知驾驶员泊车模式的意愿。
鉴于PLA传感器的线路均连接在T12a与T12p插接器上,因此可以将T12a定义为前部传感器插接器,T12p为后部传感器插接器。
J791的T12a/2端子是前部传感器公共供电端,T12a/l端子为传感器公共接地端,6个传感器并联连接在这2个端子的节点X65与348上。传感器获得12 V电源后投入工作,J791的T12a/5、T12a/6、T12a/7、T12a/8、T12a/9与12a/10端子分别是前部传感器信号输入端,其间连接着位于发动机舱前部左纵梁右侧的黑色中间插接器TlOi(图18、图19和图20)。
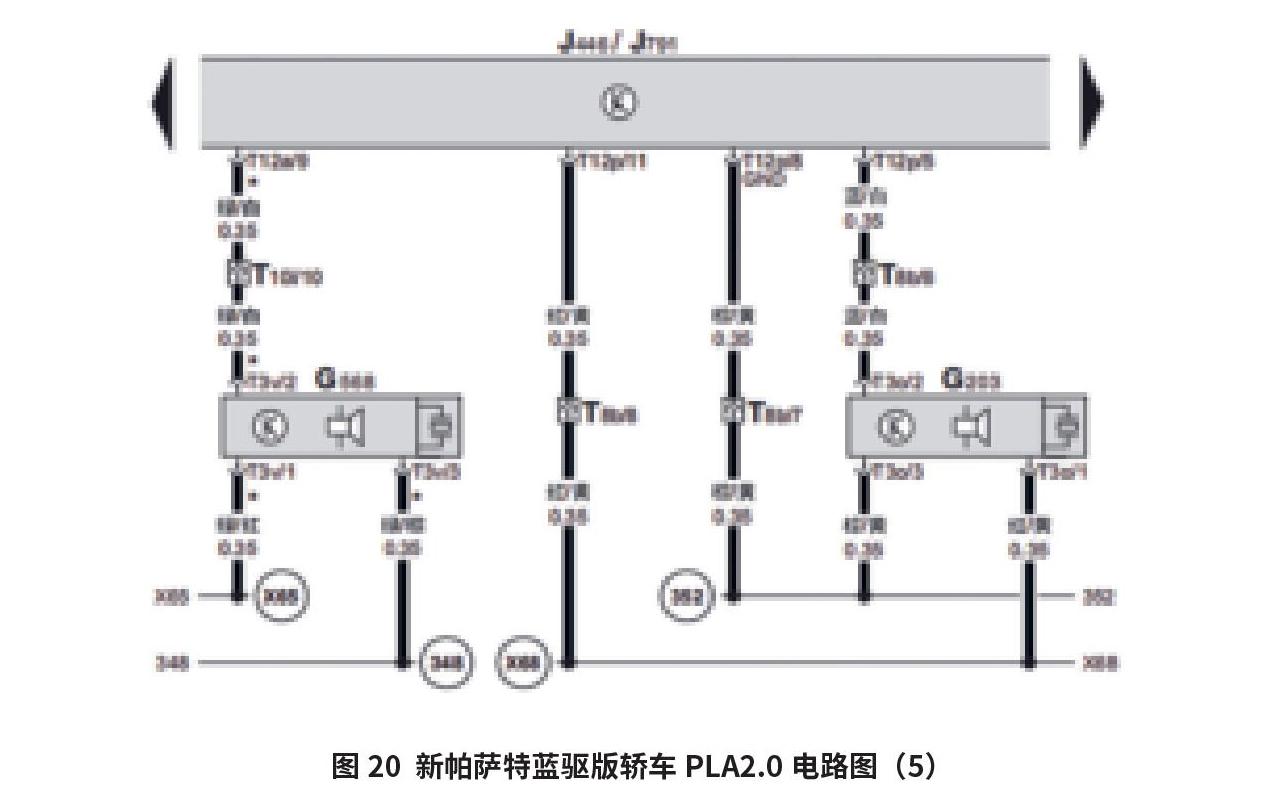
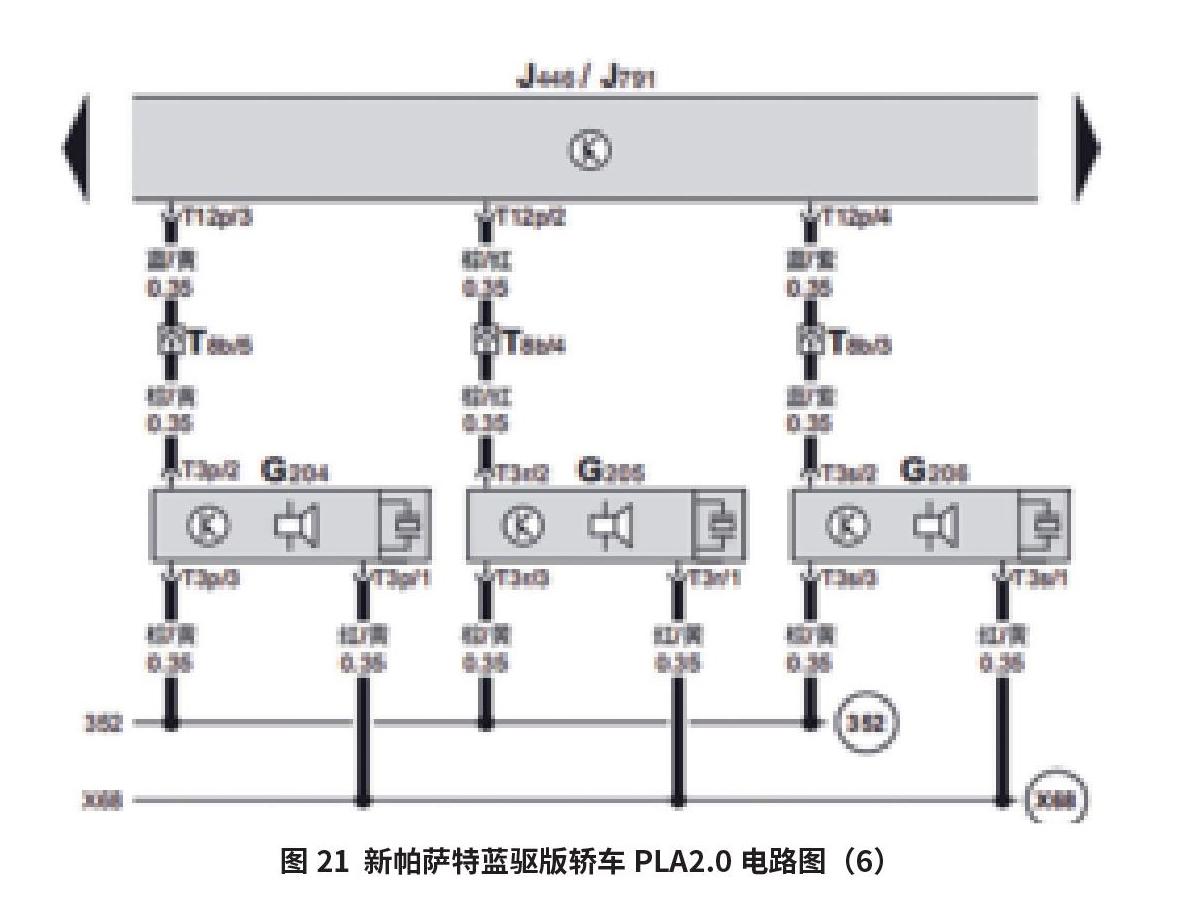
J791为后部传感器的公共供电端为T12p/ll,公共接地端为T12p/8端子,6个传感器并联连接在这两个端子的节点X68与352上。传感器信号输入端子是T12p/2、T12p/3、T12p/4、T12p/5、T12p/6与T12p/10,通过车身后部保险杠内左侧黑色中间插接器T8b与传感器连接(图20、图21和图22)。
J791是驱动系统CAN数据总线上的用户,通过数据总线与其他控制单元进行数据交换。如表达需要在左侧搜寻车位的左转向灯信号,就来自数据总线,数据总线接入端口为T16g插接器。
PLA3.0与2.0版本基本相同,但系统的亮点是增加了垂直车位车头进入功能、一键自动选择泊车模式,升级了泊车算法,进一步提高了系统灵敏度,自动泊车过程更加快速精准(图23)。 四、系统维修时诊断信息汇集和帮助
