基于C-OWA算子和证据理论的船舶夜航光环境安全评价*
2020-01-13李志荣朱金善余鉴文
李志荣,朱金善,宋 健,余鉴文
(大连海事大学 航海学院,辽宁 大连 116026)
0 引言
随着“海运强国”战略的持续推进,港口经济快速发展的同时,海上交通拥挤、船舶夜航环境复杂等问题日益突出。根据海难事故的分析数据可知,船舶夜间发生事故的概率高达70%[1]。船舶夜航的局限性在于夜航光环境的特殊性和复杂性导致视觉信息不能被有效的获取和分析,引发船舶碰撞危险[2]。因此,客观、科学地评价船舶夜航安全,可为控制和预警船舶夜航事故提供一定的参考依据。
鉴于船舶夜航安全的重要性,国内外关于船舶航行以及夜航光环境的安全进行了大量研究。Wang等[3]运用模糊层次分析法评价了南海海域船舶航行安全;Pak等[4]通过分析大量的船长经验,建立了港口航行环境的模糊综合评价模型;Gucma等[5]基于模糊综合评价模型评价了限制水域环境的通航安全;Zheng 等[6]基于贝叶斯网络构建了船舶航行事故的安全评价模型;翁建军等[7]分析了海上光污染的成因和对船舶夜航安全的影响,并从船舶航行、海上光污染控制、海事主管机关、立法等方面提出保障船舶夜航安全的对策;朱金善[8]从光学、色度学以及视觉工效等方面研究了海上光污染对船舶夜航安全的影响,并以船舶号灯可识别性为指标运用BP神经网络评价了船舶夜航光环境污染程度;黄成等[9-11]利用光学、色度学以及系统工程理论,从驾驶人员视觉绩效、船舶行为、夜航光环境条件等3方面建立了由19个指标构成的船舶夜航光环境评价指标体系,并构建了船舶夜航光环境的物元法评价模型和云物元评价模型;赵洪帝等[12]通过AHP与熵权理论的结合构建了改进的客船夜航安全评价未确知测度模型。
综上所述,目前在船舶夜航光环境的研究中,其评价指标具有不确定性且赋权方法常采用单一的层次分析法或熵权法,导致评价结果具有片面性。针对指标不确定性问题和权重的片面性问题,本文采用组合数的有序加权平均C-OWA算子确定评价指标权重,构建基于证据理论的船舶夜航光环境评价模型,将不确定的评价结果转换为可靠的数值,融合各个证据评价结果对船舶夜航光环境的安全度进行评价,以期为船舶夜航安全的评价和海上光污染的治理提供一定的支持。
1 船舶夜航光环境安全评价指标体系的建立
船舶在沿岸、进出港、灯光捕鱼船密集地等水域夜航时,各类照明灯、捕鱼灯及岸上灯光会妨碍船舶驾驶人员对信号灯的识别和正常视觉瞭望,从而影响船舶的夜航安全。因此,海上光污染作为船舶夜航安全的危险源,其主要体现在对夜航物标可识别性和驾驶人员视觉工效的影响,其中光环境的类型主要有光源闪烁、眩光、光的亮度、光的色度、光源位置、光源种类等[9]。其影响形式如下:
1)色彩、灯型相似以及光色过亮的干扰灯光导致船舶夜航驾驶人员对信号灯的误导。
2)港口灯光设施和岸边亮化工程等的背景亮度过大会产生眩光,其影响驾驶人员的视觉工效,进而影响正常的视觉瞭望。
3)灯光闪烁频率的快慢及其变换时间长短会影响驾驶人员的暗适应能力,甚至会引起驾驶人员的短暂失明。
4)夜航光环境中存在的光色光型的种类过多和亮度不均匀等现象会造成驾驶人员的视觉疲劳。
结合船舶夜航光环境对船舶航行安全的影响形式,可将船舶夜航光环境评价模型分为目标层、决策层、指标层[10],其评价指标体系见表1。
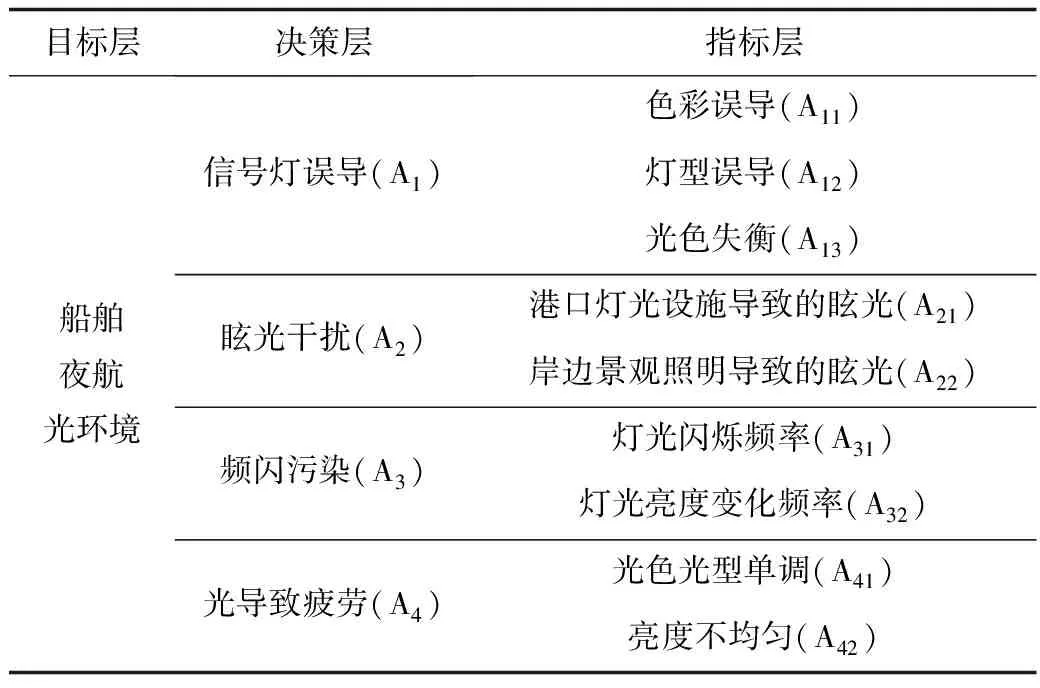
表1 船舶夜航光环境评价指标体系Table 1 Evaluation index system for light environment of ship navigation at night
2 基于C-OWA算子确定安全评价指标权重
受专家认知差异的影响,已构建的船舶夜航光环境指标体系的指标多呈现模糊不确定性,导致所计算的权重具有一定主观性。为了避免在权重赋值的过程中出现此类问题,本文采用组合数的加权平均C-OWA算子计算权重,其步骤为:
1)邀请n位船舶夜航光环境研究的相关专家,采用10分制的形式对评价指标的重要程度进行评判,分值的大小可表示指标的重要程度,构成指标的原始决策数据A={a1,a2,…,an},遵循由大到小的规则对A进行编号,得到新的决策数据B={b0,b1,…,bn-1}。

(1)

(2)
式中:i为评价指标,i=1,2,…,m。
4)计算评价指标A的相对权重ωi:
(3)
3 船舶夜航光环境安全评价模型的构建
由于影响船舶夜航的光环境因素复杂且其评价指标在专家赋值时存在差异性,导致评价结果具有较强的不确定性和模糊性。而证据理论作为1种不确定性推理方法,最早由Dempster A提出,后经Shafer改进,简称为D-S证据理论,其不确定信息表达和处理能力在安全评价和决策分析等领域得到广泛应用[14]。因此,本文基于证据理论构建船舶夜航光环境的评价模型,以克服评价过程中的不确定性和模糊性。
3.1 获取船舶夜航光环境安全评价数据
在使用证据理论评判某一问题的过程中,称互不相容的完备样本空间集合为识别框架θ,可表示为θ={θ1,θ2,θ1,…,θn}。邀请船舶进出港的夜航引航员以及相关船舶航行安全研究的专家对各评价指标的安全性在0~1间进行评分,分值越趋近于1,该指标的风险性越小,所评价光环境对船舶夜航安全的影响越低。以船舶夜航的安全性为评价目标,将船舶夜航光环境的安全评价等级划分为“安全”“较安全”“较危险”“危险”4个等级,详见表2。

表2 船舶夜航光环境安全评价等级Table 2 Safety evaluation grades for light environment of ship navigation at night
3.2 确定综合概率
在证据理论中,基本信任分配函数表示对证据所建立信任程度的初始分配,定义为:在识别框架θ上的基本信任函数M是1个2θ到[0,1]的映射,满足:

(4)
式中:M(A)为事件A的基本信任分配函数,又称基本概率,为证据对A的信任程度,该事件A的不确定性m(A)=1-M(A)。船舶夜航光环境评价指标的综合概率为:
M(A)=a∏Wq
(5)
式中:a为指标A的评判分值;q为指标体系等级;Wq为指标相对权重。
3.3 确定信任区间
信任区间是由信任函数和似然函数确定的区间[Bel(A),Pl(A)],其中信任函数为:
(6)
式中:A⊆识别框架θ。
似然函数为:

(7)

在证据理论的信任区间[Bel(A),Pl(A)]中,Bel(A)为事件A真的信任程度,Pl为事件A潜在的总信任程度,A的真实信任存在于该区间,通过证据融合可将不确定信息区间范围不断缩小以增加证据的可信度。
3.4 船舶夜航光环境安全综合评价
在船舶夜航光环境评价过程中,不同的评价指标因数据来源不同导致概率分配函数不同。综合信任区间是通过正交和运算并融合各专家所提供的单个信任区间而合成的,由其与所确定的船舶夜航光环境安全评价等级范围相比较,最终确定评价等级。
对于识别框架θ中的多个信任分配函数M1,M2,…,Mn,其合成原则为[15]:
(8)
(9)
式中:K的值在0~1,为归一化常数,可表示证据间的矛盾程度。K越趋近于1,表示证据间的冲突越明显;当K为1时表示证据间完全冲突,无法进行证据间融合,导致证据理论无法进行。
4 实例分析
大连大窑湾港是我国重要的深水中转港,以大窑湾港为例,分析其部分水域的海上光环境对船舶夜航安全的影响情况。通过Canon EOS-1D Mark Ⅲ数码相机拍摄了其海上光环境(见图1),并在拍摄过程中发现其光环境对船舶夜航信号灯的可识别性和视觉造成了一定的影响。通过建立船舶夜航光环境评价体系,并运用证据理论模型评价该光环境中船舶夜航安全等级。

图1 大连大窑湾港某水域的船舶夜航光环境Fig.1 Light environment of ship navigation at night in a certain water area of Dalian Dayaowan port
1)确定船舶夜航光环境评价指标权重
利用组合数的加权平均C-OWA算子计算权值,邀请5位船舶夜航方面的专家或者引航员,通过1~10打分的形式对指标的重要程度和船舶夜航光环境整体的安全性进行评价,见表3的P列。
在计算指标权重过程中,首先将专家的打分分值由大到小进行排列,得到新的分值集合;然后利用公式(1)~(3)求得各指标的相对权重,见表3。决策层的指标权重与文献[11]中基本相符,因此,基于组合数的加权平均C-OWA算子计算权值具有一定的有效性。
2)确定船舶夜航光环境评价指标综合概率和信任区间
邀请5位船舶夜航方面专家或者引航员,对各指标的安全性在0~1范围内进行打分评判,见表3的Q列。
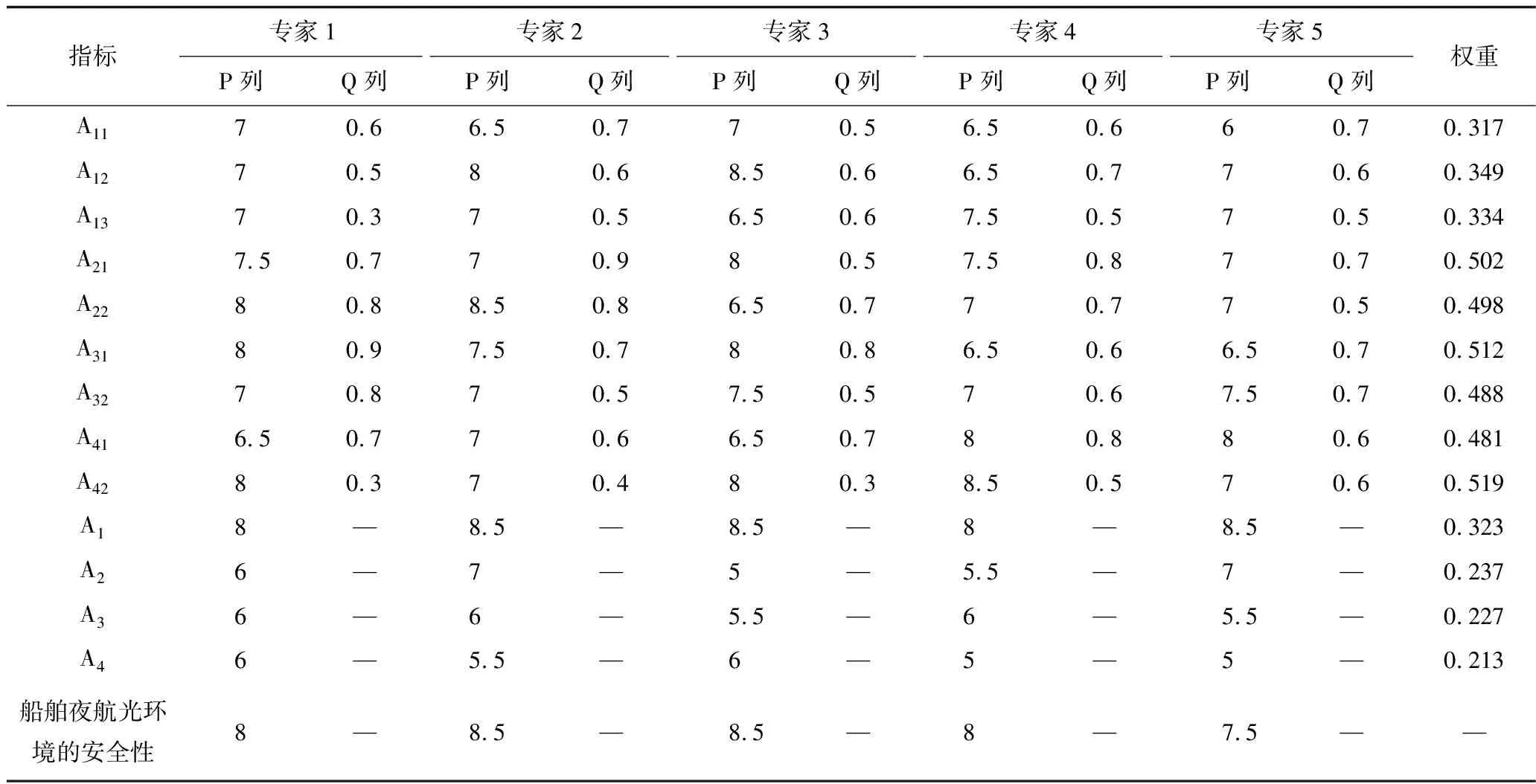
表3 评价指标的专家评分和权重Table 3 Scores and weights of experts for evaluation indexes
通过公式(4)~(5)可确定各指标层指标在各专家评判下的综合概率,见表4。
3)确定船舶夜航光环境评价指标的信任区间
确定决策数据B各指标层的指标在各专家评判下的综合概率后,根据公式(6)~(7)确定船舶夜航光环境安全评价决策层指标的信任区间和不确定度,并通过不确定度求得各专家的综合信任区间;根据表2 确定船舶夜航光环境安全的评价结果,见表5。
4)船舶夜航光环境安全的综合评价
各专家针对不同的评价指标给出的结果存在一定差异,运用正交运算融合各专家所提供的单个信任区间,得到更加可靠的评价结果。将专家1,2的证据信息进行融合可得:
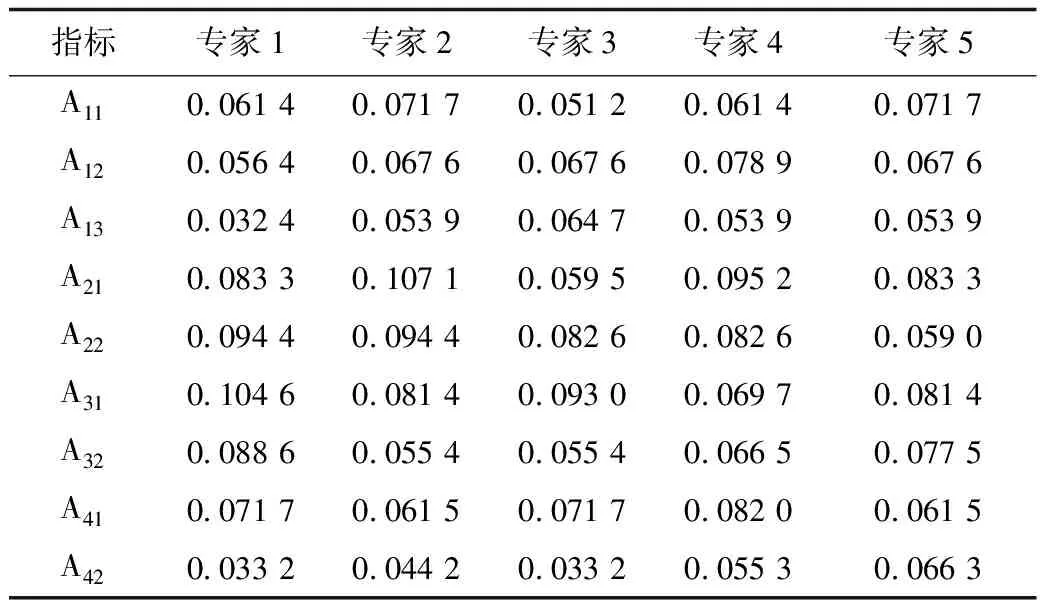
表4 评价指标的综合概率Table 4 Comprehensive probability for evaluation indexes
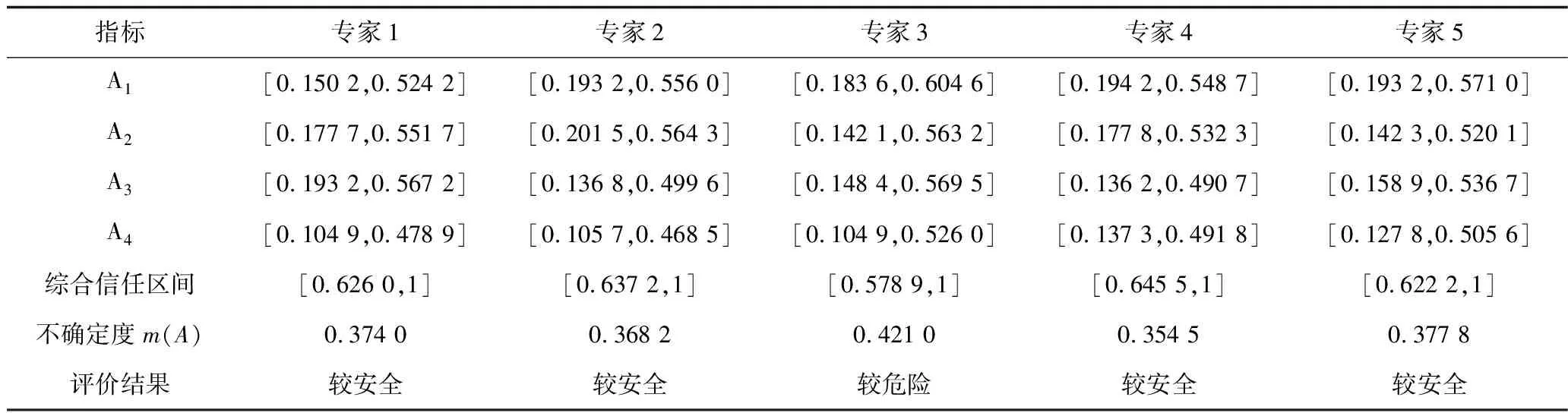
表5 决策层指标的信任区间和不确定度Table 5 Trust interval and uncertainty of decision-making layer indexes for safety evaluation
(8)
(9)
通过公式(8)~(9)依次计算得M1,2(A2)=0.251 0,M1,2(A3)=0.211 4,M1,2(A4)=0.126 9,并求得m1,2=1-{M1,2(A1)+M1,2(A2)+M1,2(A3)+M1,2(A4)}=0.188 1
最终整理专家1,2信息融合的结果为:
M1,2{M1,2(A1),M1,2(A2),M1,2(A3),M1,2(A4),m1,2(A)}={0.222 6,0.251 0,0.211 4,0.126 9,0.188 1}
类似地依次逐一融合其他专家的评分可得:
M1,2,3{M1,2,3(A1),M1,2,3(A2),M1,2,3(A3),M1,2,3(A4),m1,2,3(A)}={0.257 9,0.258 1,0.227 8,0.132 8,0.121 6}
M1,2,3,4{M1,2,3,4(A1),M1,2,3,4(A2),M1,2,3,4(A3),M1,2,3,4(A4),m1,2,3,4(A)}={0.287 1,0.274 9,0.221 8,0.214 7,0.074 5}
M1,2,3,4,5{M1,2,3,4,5(A1),M1,2,3,4,5(A2),M1,2,3,4,5(A3),M1,2,3,4,5(A4),m1,2,3,4,5(A)}={0.311 7,0.268 4,0.228 8,0.141 9,0.049 2}
通过融合5位专家的证据信息,信任区间逐渐变小,最终信任函数为Bel(A)=M1,2,3,4,5(A)=0.950 8,Pl(A)=1,信任区间为[0.950 8,1],不确定度为m(A)=0.049 2,综合评价该船舶夜航光环境的安全性为“安全”,且通过融合各专家的证据信息,缩小了信任区间的范围,明显减小了专家单独评价时的不确定度。因此,证据理论模型可减小专家个人主观性带来的误差,提高了评价的准确性;且其融合结果说明该光环境对船舶夜航安全的影响较小,与专家对该水域船舶夜航光环境安全性总体评价的实际情况相符。
5 结论
1)通过分析海上光污染的来源,总结了船舶夜航光环境的安全影响因素,构建了含有9个指标层的指标体系,引入组合数的加权平均C-OWA算子对指标进行赋权,并对安全评价等级进行区间划分。
2)通过建立的证据理论评价模型对大连大窑湾港船舶夜航光环境进行安全评价,得出该光环境的安全等级为“安全”,对船舶夜航的安全性影响较小。
3)建立的船舶夜航光环境的证据理论评价模型,可定量评价光环境对船舶夜航安全的影响程度,提高了评价结果的准确性和客观性。通过该模型得出的船舶夜航光环境的评价结果,可为海上光污染对船舶夜航安全影响的防控和预警提供一定的理论依据。
