基于改进型入侵野草算法的三轴磁传感器非正交误差校正
2020-01-08罗静博陈浩赵苗翟国君
罗静博,陈浩,赵苗,翟国君,2
(1.海军工程大学 兵器工程学院,湖北 武汉 430033;2.海军海洋测绘研究所,天津 300061)
0 引言
磁场测量是对一个空间矢量场的获取,若要获取其完整的信息,采用三轴磁传感器是一种常用的方式。在现实环境中,由于传感器加工工艺及安装水平的限制,传感器的三轴不可能完全正交,由此会导致三分量磁测误差[1]。由文献[2]可知,在45 000 nT地磁背景下,若三轴不正交度为0.25°,则测量误差就会达到大约100~200 nT,这些误差会严重影响铁磁性物体的探测,因此对其进行补偿是必要的[2-4]。
在已有研究中,文献[1]提出了一种基于旋转数据正弦曲线拟合的方法来对三轴磁传感器非正交误差进行标定,该方法不需要高精度的磁场参考,但不易获取平稳的旋转数据,不利于拟合。文献[5]提出了以误差校正矩阵为基础的快速校正算法,解决了传统共轭次梯度算法和神经网络模型的算法复杂的问题。文献[6]基于总体最小二乘法对捷联三轴磁力仪的误差参数进行了估计,相较于传统最小二乘方法提高了参数估计精度。文献[7]将三轴传感器非正交性误差进行了分离,提出了误差分离矢量校正法,并结合卡尔曼滤波对校正矩阵参数进行了求解。文献[8]利用磁数据进行弹体姿态测量,建立了完整形式的地刺传感器椭球误差模型,并计算得出误差校正矩阵参数,但与文献[1]的局限性一致,不容易得到较好的拟合效果。
本文提出不需要借助高性能磁力仪的最小二乘校正方法,并改进了入侵野草(IWO)算法用以求解该最小二乘校正方法,通过与其他3种智能优化算法的对比,判断非正交参数标定和数据补偿结果的优劣。
1 三轴磁传感器的非正交误差模型

图1 传感器三轴的非正交关系Fig.1 Non-orthogonal relationship of three-axis magnetic sensor
磁传感器中,三轴分别为x轴、y轴、z轴,其测量值分别为Bx、By和Bz.取理想正交坐标轴x1、y1和z1,理想的三轴磁数据为Bx1、By1和Bz1.选取两个坐标系的纵轴z和z1重合,令Oyz和Oy1z1平面重合,其中Oy轴和Oy1轴的夹角为β,Ox1轴与Oxy平面的夹角为γ,x1轴在Oxy平面的投影与x轴的夹角为α,具体对应关系如图1所示。
由图1可知,磁传感器的三轴输出近似为
(1)
即
B=NB1,
(2)
式中:
根据(2)式的变换方程得知,传感器实际测量值与理想正交值存在误差。设B2为理想正交数据的模值,即

理想三轴正交数据虽然会随着其与磁场位置的变化而变化,但其模值基本不会变化。利用这一性质,根据最小二乘法,以均方差最小为目标来求解三轴非正交度。建立目标函数如下:
(3)
根据现有的机械工艺水平,假设3个非正交角度在±3°之间,转换为弧度就是±0.052 36,即
(4)
综合(3)式和(4)式便构成了三轴磁传感器的非正交误差校正的最小二乘方法。最小二乘问题通常通过智能优化算法可以得到较好的解决。
2 基于改进型IWO算法的误差校正方法
近年来,智能优化算法不断涌现[9]。IWO算法是2006年由Mehrabian等提出的一种从自然界杂草进化原理演化而来的随机搜索算法,它具有良好的适应性和收敛性,易于实现[10]。IWO算法是以群体中优秀个体来指导种群的进化,以正态分布动态改变标准差方式,将由优秀个体产生的子代个体叠加在父代个体周围,再经过个体之间的竞争得到最优个体。IWO算法流程如图2所示。但由于传统IWO算法在优化过程中的不可逆性,使得优化结果容易陷入局部最优解,并且其空间扩散范围较小,使得优化收敛速度较慢。为解决上述问题,对IWO算法进行了改进,在算法的“空间扩散”步骤引入了振荡因子1+sin (iter),iter为当前迭代数。

图2 IWO算法流程图Fig.2 Flowchart of IWO algorithm
算法具体步骤如下:
1)种群初始化:初始杂草随机在搜索空间内分布。具体初始化参数确定如表1所示。
2)生长繁殖:适应度高的父代产生的种子多,适应度低的父代产生的种子少。具体新生种子数量由(5)式决定:

Snum=(Fit-min(Fit))max(Fit)-min(Fit)×(Smax-Smin)+Smin),
(5)
式中:Snum为新生种子数量;Fit表示适应度。
3)空间扩散:子代按照正态分布规则随机分布在父代周围;子代正态均值为父代的数值,标准差则随着迭代次数而改变。变化方式如下:
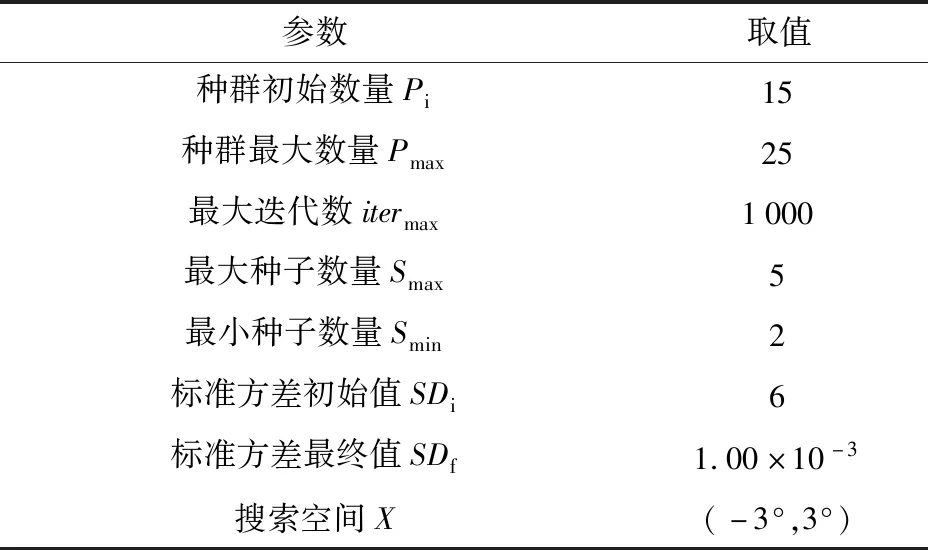
表1 IWO参数的初始化Tab.1 Initialization of IWO parameters
(6)
式中:SDiter为标准方差的当前值;n为非线性调制参数。
本文改进型IWO算法引入空间扩散的振荡因子1+sin (iter),即
(7)
从而有利于在迭代初期更快速地发现较好的解、提升算法收敛性,并在迭代后期扩大搜索范围,避免陷入局部最优解,有利于寻优精度。
4)竞争淘汰:随着迭代次数的增加,当种群数超过初始化的最大种群数量后开始淘汰部分个体。淘汰方式是将当前所有个体的适应度排序,淘汰适应度低的个体。
将(4)式描述的参数变量范围输入模型参数后,通过上述4个步骤在该范围内搜寻(3)式描述的最优Fobj,最优值对应的参数变量就是该三轴磁传感器的三轴非正交度。利用上述最优解可对传感器进行误差校正。仿真与实验结果见第3节和第4节。
为做对比研究,同时利用粒子群优化(PSO)算法、自适应差分进化(DE)算法和禁忌搜索(TS)算法对该最小二乘问题也做了同样的求解。PSO算法是1995年Kennedy等受鸟类群体行为的启发而开发的[11]。该算法对非线性、多峰值问题具有良好的全局搜索能力[12-13]。DE算法于1997年由Storn等提出[14],该算法的关键思想是利用种群中随机选择的两个个体来干扰另一个个体[4],具有较强的鲁棒性[15-16]。TS算法最早于1986年由Glover教授提出[17]。该算法在领域搜索的基础上,通过设置禁忌表来避免已经搜索过的空间的,并通过一些藐视准则来奖励一些较好的状态[9]。
3 数值仿真计算分析
设置仿真参数:α=0.2°,β=0.43°,γ=0.36°;地磁场为50 000 nT的标准磁场加-50~50 nT的随机波动磁场;地磁倾角为47.36°;采样点为200个,迭代1 000次(为了结果精准),得到三轴磁场数据,并根据第2节中所述算法进行求解,得到参数结果如表2所示。
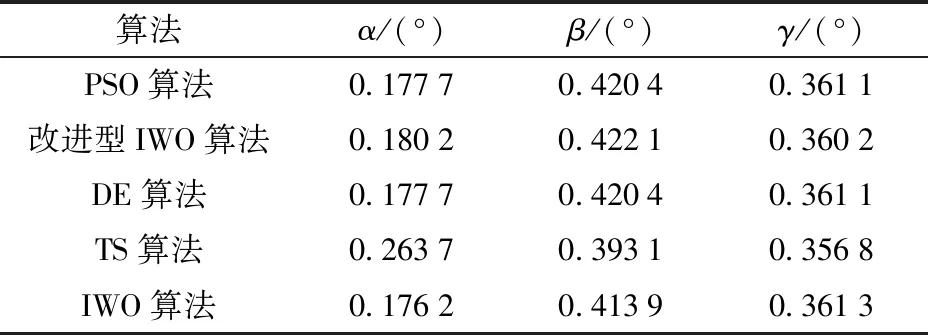
表2 仿真数据的误差校正参数计算结果Tab.2 Calculated results of error correction parameters of simulation data
由表2可知,采用改进型IWO算法对最小二乘模型求解得到的非正交度参数最接近真实值,3个参数分别收敛于真实值的90.10%、98.16%和100.06%.TS算法结果较差,3个参数分别收敛于真实值的131.85%、96.26%和100.36%.
利用表2的参数计算结果对原始数据进行补偿,结果如图3所示,各算法迭代过程如图4所示,校正后磁场的波动幅度如表3所示。
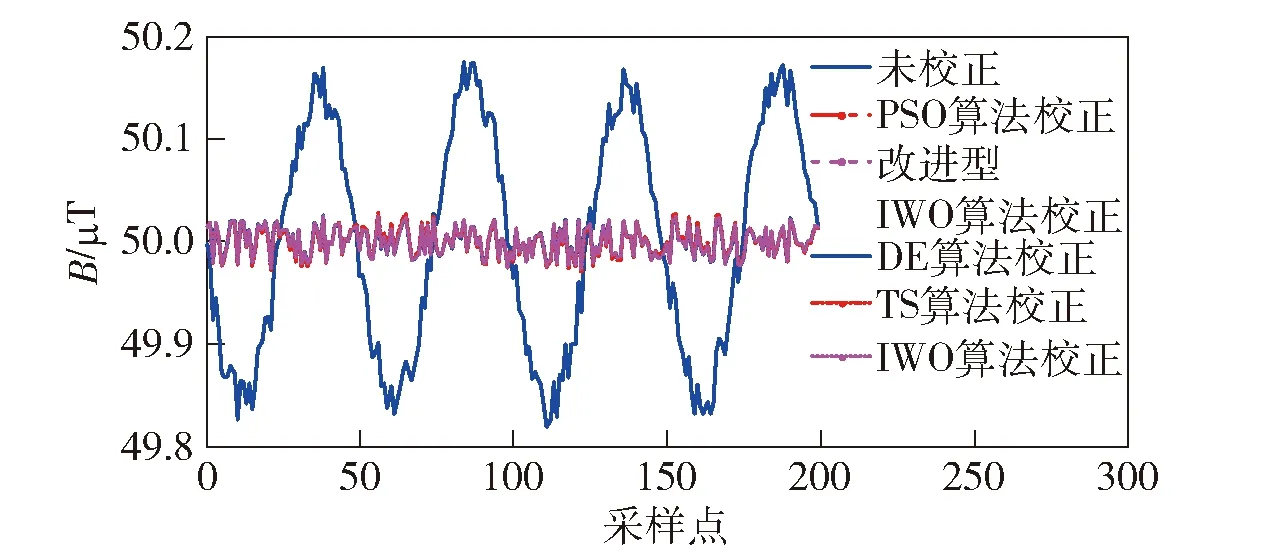
图3 仿真数据误差校正的各算法补偿结果Fig.3 Compensation results of various algorithms for error correction of simulation data
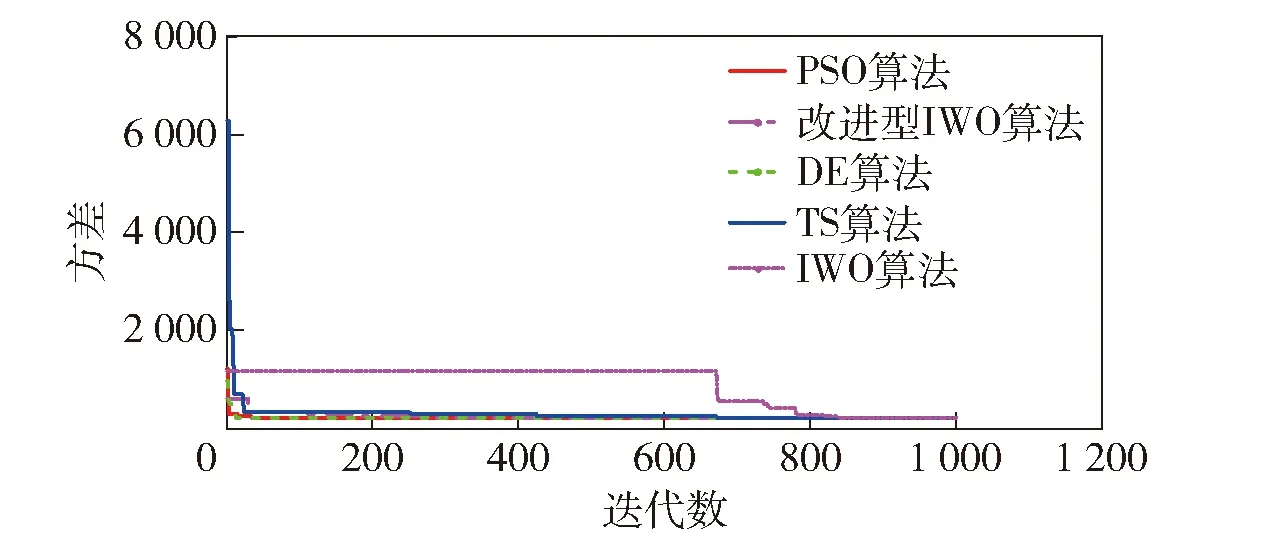
图4 仿真数据误差校正的各算法迭代过程Fig.4 Iterative process of each algorithm for error correction of simulation data
由图4可知,采用改进型IWO算法得到的数据补偿结果收敛最快,传统IWO算法补偿收敛速度最慢。由表3可知,采用改进型IWO算法得到的数据补偿结果最为稳定,三轴非正交运动噪声的抑制率为85.42%,符合非正交度模型要求。TS算法补偿收敛结果波动相对较大,三轴非正交运动噪声的抑制率为84.31%.
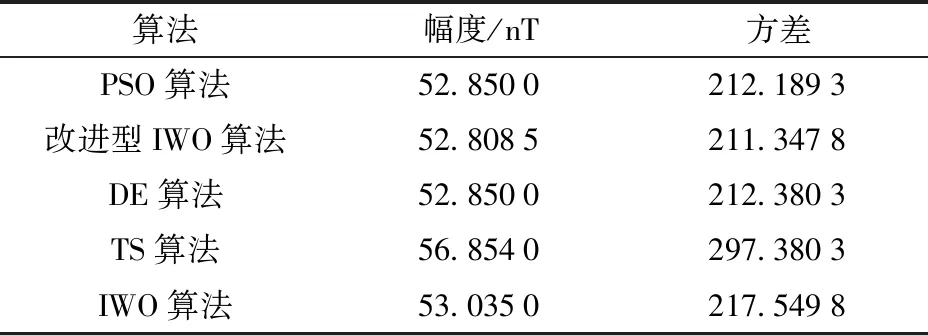
表3 仿真数据误差校正后磁场波动Tab.3 Magnetic field fluctuation after error correction of simulation data
由于加工工艺的不同,三轴不正交度存在一定偏差。与上述仿真同理,修改α、β和γ的取值(取值在0.1°~1.0°),继续做1 000组仿真数据。仿真数据表明:基于改进型IWO算法的三轴非正交误差校正后,运动噪声的抑制率为63.157%~96.9%(角度参数取值越大,噪声越大,抑制率越高),角度参数都收敛于真实值的87.83%~112.76%.
4 数值实验计算分析
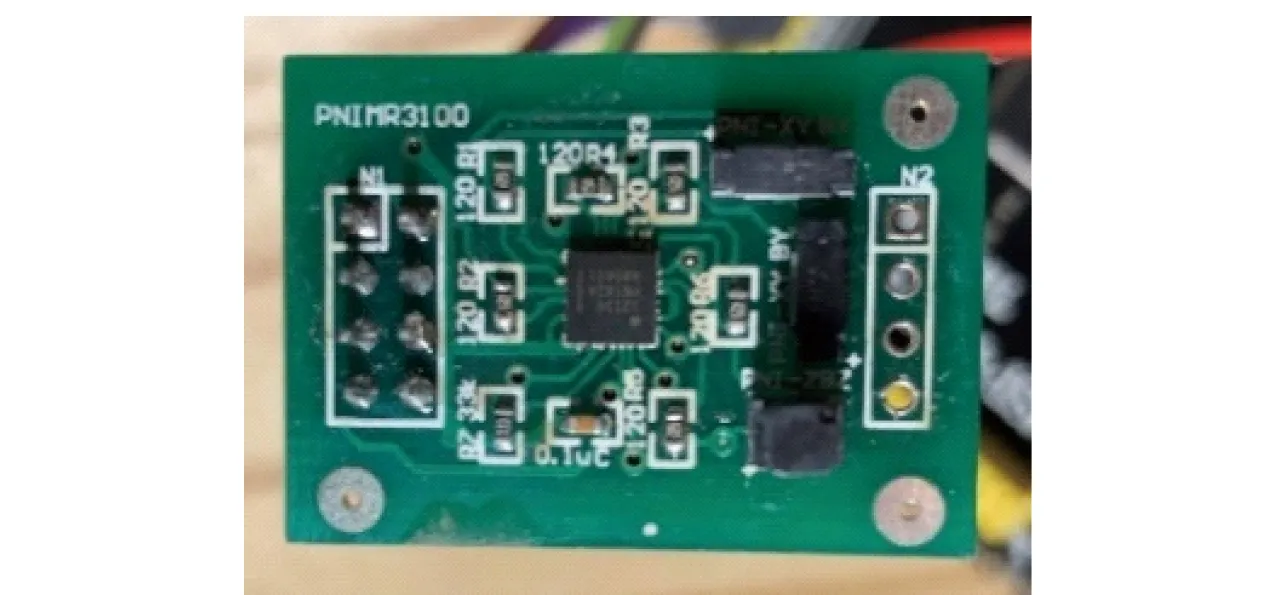
图5 三轴磁传感器Fig.5 Three-axis magnetic sensor
利用美国PNI公司生产的三轴磁传感器RM3100制作三轴磁场测量装置(见图5),并利用其在三轴合金无磁转动平台上进行地磁场的测量,得到三轴磁场数据(见图6)。对实验数值求解分析,得到参数结果如表4所示。需要说明的是:本实验是凌晨在消磁实验室中进行的,凌晨测量可排除人类活动的磁干扰,消磁实验室内部物件均不是铁磁性质的材料,并定期进行磁标定与维护,从而保证了所测得磁场的稳定性。

图6 三轴合金无磁转台实验测量Fig.6 Experimental measurement of magnetic field on triaxial alloy non-magnetic turntable
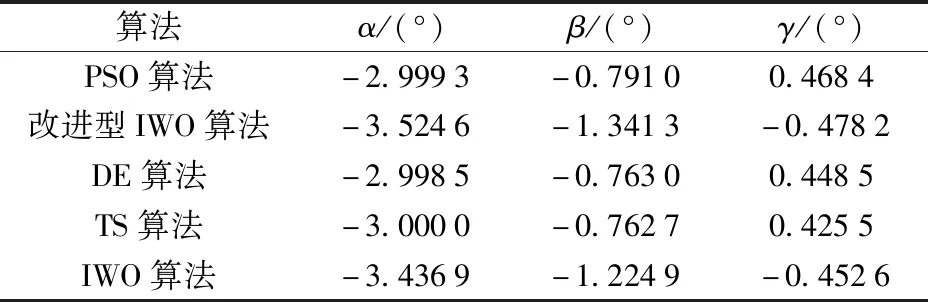
表4 实验数据的误差校正参数计算结果Tab.4 Calculated results of error correction parameters of experimental data
利用表4的参数计算结果对原始数据进行补偿,结果如图7所示,各算法迭代过程如图8所示,校正后磁场的波动幅度如表5所示。
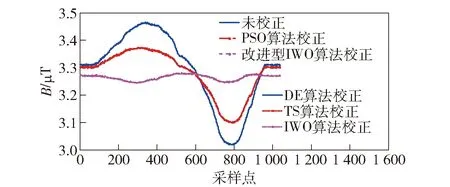
图7 实验数据误差校正的各算法补偿结果Fig.7 Compensation results of various algorithms for error correction of experimental data
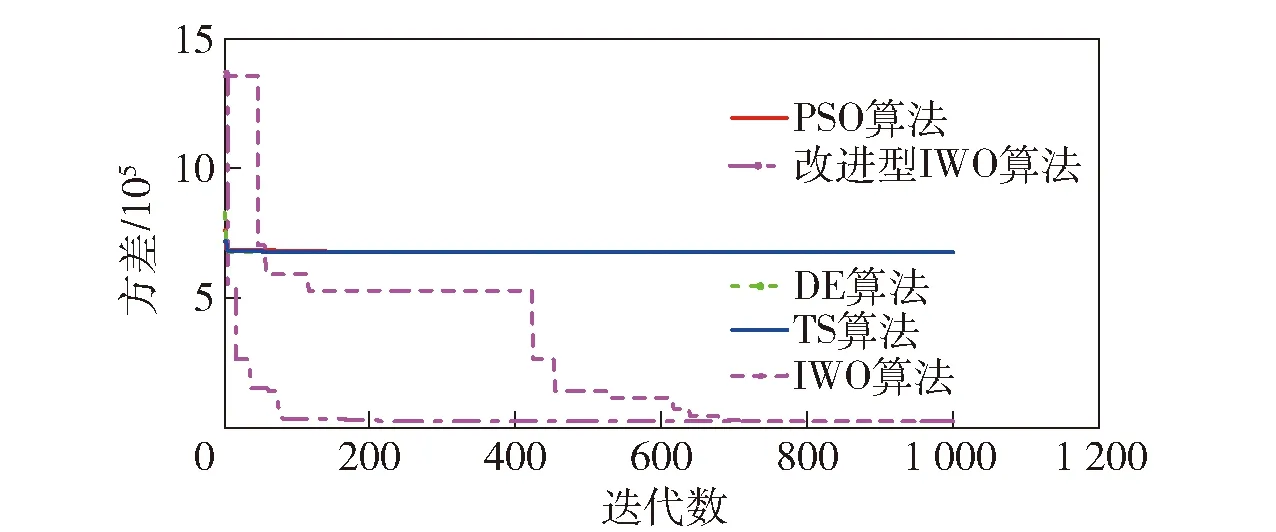
图8 实验数据误差校正的各算法迭代过程Fig.8 Iterative process of each algorithm for error correction of experimental data
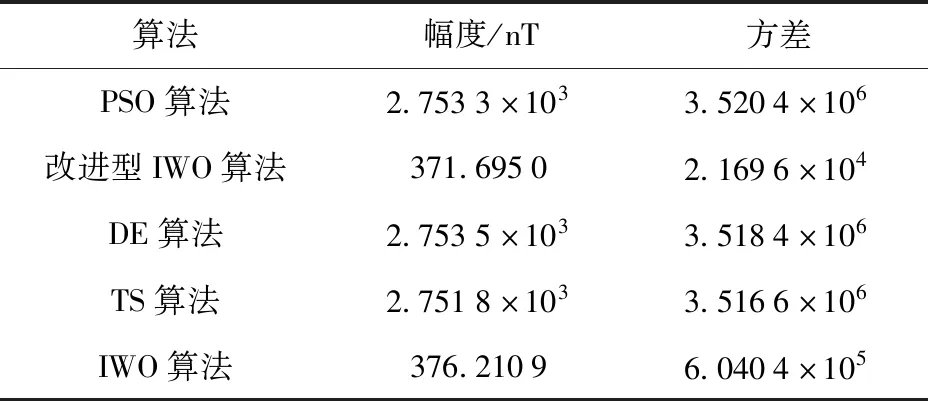
表5 实验数据误差校正后磁场波动Tab.5 Magnetic field fluctuation after error correction of experimental data
由图8可知,各算法的收敛速度与仿真结果一致。根据计算结果可知,未校正数据的波动幅度为4.477 2×103nT,采用改进型IWO算法得到的数据补偿结果的三轴非正交运动噪声的抑制率为86.50%,且方差最小。
5 结论
本文通过基于最小二乘的误差校正方法,实现了三轴磁传感器的非正交误差校正与三分量磁数据的补偿。得出主要如下结论:
1)基于改进型IWO算法的最小二乘误差校正方法可以较好地对三轴磁传感器非正交误差进行校正。在设定磁场噪声波动在±50 nT时,仿真结果的3个非正交参数分别收敛于真实值的90.10%、98.16%和100.06%.
2)通过本文方法的校正结果对三分量数据进行补偿后,磁场的波动幅度在噪声范围内。仿真数据三轴非正交运动噪声的抑制率大约为85.42%,方差为211.347 8.实验数据三轴非正交运动噪声的抑制率大约为86.50%,方差为2.169 6×104.
3)通过本文得到的适用于三轴磁传感器非正交误差校正办法,不需要高精度磁力仪进行参考,简化了测量设备,并可以补偿80%以上的因三轴非正交导致的运动噪声。