基于Hough变换的水中气泡群特征参数提取方法研究
2020-01-08覃若琳蒋晓刚金良安高可心
覃若琳,蒋晓刚,金良安,高可心
(海军大连舰艇学院 航海系,辽宁 大连 116018)
0 引言
目前,基于舰船气泡尾流的声制导作为尾流自导鱼雷的主要制导方式,利用尾流区与普通海面对声波散射强度的差异进行制导[1]。而舰船气泡尾流场声散射强度主要取决于尾流气泡群的气泡数密度和尺寸分布两个特征参数[1]。因此,舰船气泡尾流场特征检测是舰船隐身性能研究和尾流自导鱼雷制导效能研究的基础。
目前用于水中气泡群特征检测的方法主要是基于高速摄影的直接图像采集法,即通过高速摄像机采集水中气泡群图像,用数字图像处理技术从图像中识别出气泡群的数密度和尺寸分布信息。水中气泡群图像噪点多、气泡重叠度大,因此准确检测图像中的气泡并对其进行计数和尺寸识别,是气泡图像处理的难点。王维[2]针对激光切片法采集到的模拟尾流气泡群图像,提出一种基于特征向量的K近邻(KNN)学习尾流气泡粒子识别方法,来识别尾流序列图像中的深度叠加、遮挡、残缺成像等多种成像状态的气泡粒子;但这种方法依赖于精密的激光图像采集系统,工程应用难度大。王红一[3]提出一种基于图像背景像素传染的气泡填充算法和基于Hough变换的三维气泡椭球体重构方法,实现了对单个稀疏气泡的特征提取及椭球气泡的三维重构。孟欣东[4]提出动态阈值压缩的大津法进行阈值分割,实现了单个稀疏水下气泡的特征提取。另外还有一些学者采用阈值分割、分水岭分割等方法,对水中气泡群图像进行特征提取处理。但是对于气泡数密度高、重叠度大、噪声大的舰船气泡尾流场图像,上述方法的处理结果不甚理想。
本文针对舰船尾流气泡群图像气泡数密度大、重叠度高的问题,提出一种基于改进Hough变换的水中气泡群特征参数提取方法,实现对大数密度、多重叠水中气泡群图像的气泡检测及气泡半径分布计算。用上述方法对实验室采集到的水中气泡群图像气泡数及尺寸分布进行检测,并与图像实际气泡数进行比对,检验了该算法的准确性。
1 水中气泡群特征参数提取步骤与方法
1.1 水中气泡群特征参数提取的基本思想
水中气泡群特征参数提取的步骤如图1所示,主要分为水中气泡群图像采集、像素尺寸比例计算、水中气泡群图像预处理和水中气泡群特征参数检测。特征参数检测通过改进Hough变换的方法实现。

图1 水中气泡群特征参数提取流程图Fig.1 Flow chart of characteristics extraction of bubble group
1.1.1 水中气泡群图像采集
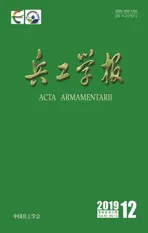
本文分析的水中气泡群图像是基于实验室舰船尾流气泡群模拟装置及气泡群图像采集装置获得的,实验装置示意图如图2所示。图2中组件为钢化玻璃水槽,尺寸为0.6 m×0.6 m×2.0 m;舰船尾流气泡群模拟装置由微孔陶瓷阵列、空气压缩机、储气罐和调压阀组成,空气压缩机储存高压空气,通过管路输送至微孔陶瓷阵列,空气经微孔陶瓷释放到水中形成微小气泡,形成的气泡半径量级约为100 μm,与舰船尾流气泡尺度相当[5-7]。图像采集系统由中国SupFire公司生产的神火L6型远程强光手电、狭缝和美国GOPRO公司生产的HERO BLACK6高速运动相机组成。黑暗环境下,强光手电发出的光经狭缝输出一道宽度很窄的光带,气泡上升至光带时便会被照亮,在相机中成像,从而采集到气泡群的实时图像。这样采集到的图像与全场气泡群图像相比,能够避免大景深带来的气泡之间高度重叠问题,减轻图像处理的难度。经过狭缝的光带厚度约为4 mm,即采集到的气泡群图像景深为4 mm.用上述方法采集到的典型水中气泡群图像如图3所示,图像尺寸为600像素×600像素。
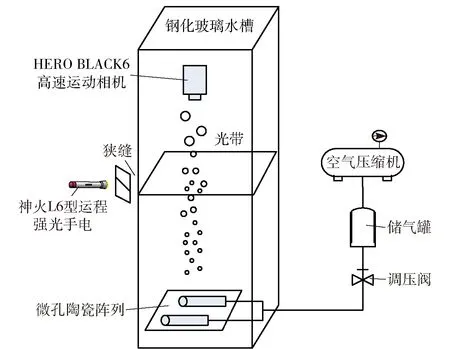
图2 实验装置示意图Fig.2 Schematic diagram of experimental device
1.1.2 像素尺寸比例计算
数字图像处理只能得到像素尺寸,要计算气泡实际的数密度和半径,就要校验图像中一个像素对应的实际尺寸。气泡群图像采集装置中,相机镜头到光切面的垂直距离为50 mm,用相机在相同垂直距离上拍摄一个尺寸已知的参照物,用数字图像处理得到参照物在照片上的像素尺寸,将像素尺寸与实际尺寸进行比对,即可得到图像的像素尺寸比例,即一个像素对应的实际尺寸。
选取一个40 mm×40 mm的矩形作为参照物,拍摄的参照物图像如图4所示。矩形在图像中占21 831 000个像素点,从而可得像素比例为1像素=8.561 μm.
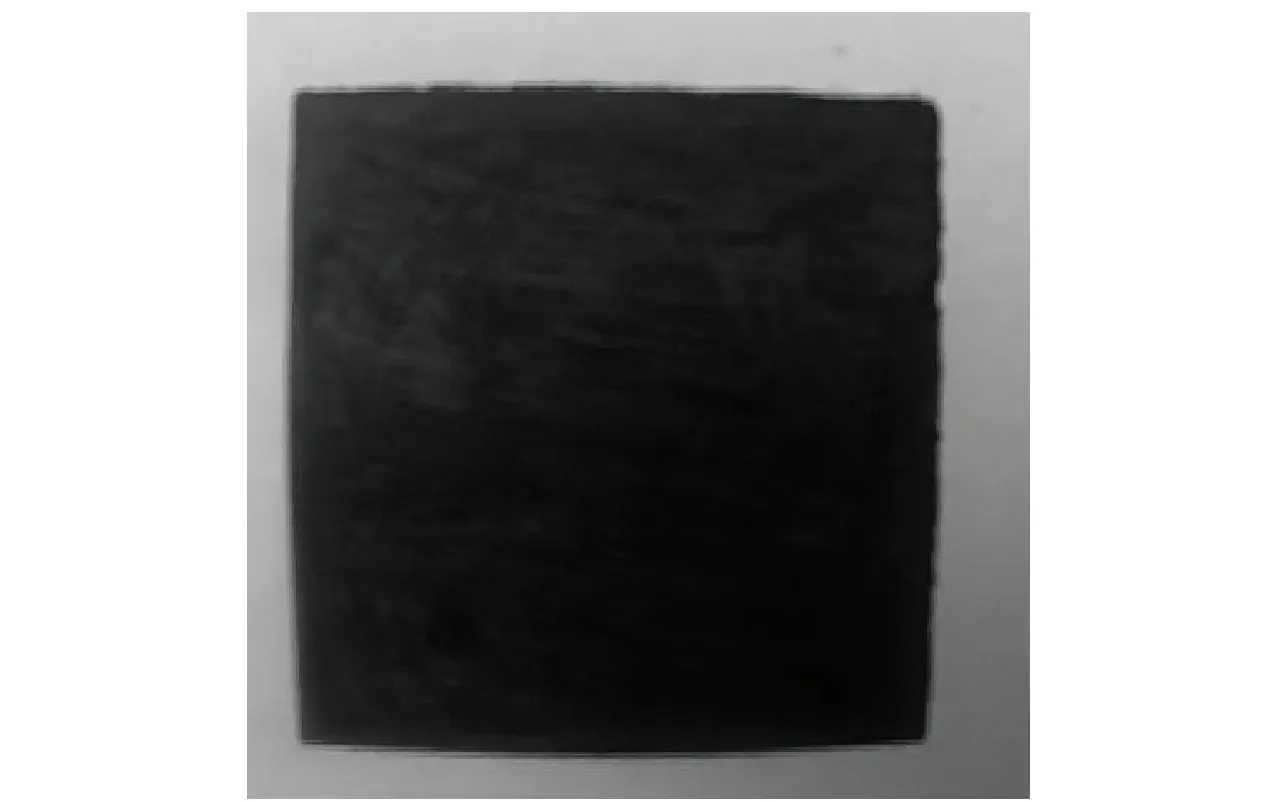
图4 参照物图像Fig.4 Image of reference object
1.1.3 水中气泡群图像预处理
水中气泡群图像预处理的目的是提高后续特征参数检测的精度,主要包括图像灰度化、保持边界滤波和边缘检测。
相机拍摄的原始气泡图像存在两个影响检测精度的问题:1)噪声的存在会使后续图像分割成为无效分割,导致气泡检测无法继续进行;2)景深造成的亮度较低气泡会由于对不上焦而变得模糊,使其在背景中不够突出、边缘不够明显,增加了检测难度。这些因素都会对气泡检测精度造成较大影响,因此需要对原始图像进行预处理。
1.1.4 水中气泡群特征参数检测
水中气泡群特征参数检测是特征提取的核心步骤,主要为基于改进Hough变换的气泡群特征参数提取。
对图像进行预处理后,就可以对气泡群特征参数进行检测。本文用圆形Hough变换理论与方法进行气泡的自动检测与计数。Hough变换实现了从图像空间到参数空间的投影[8-9],可以实现图片中任意图形的检测;只要给出一个图形的描述模型如图形的描述方程或函数等,再用这个模型遍历图像空间,把属于该模型的点映射到参数空间[8-9],最后通过参数空间投票选出峰值来确定要检测的图形。Hough变换对图像的噪声点不敏感,可有效地滤除噪声的影响,获得较高检测精度。圆形Hough变换是一种用于检测圆的Hough变换[10]。由于舰船气泡尾流场中的气泡半径是微米级,在运动过程中几乎不发生变形,可认为是圆形气泡,因此可用圆形Hough变换进行气泡检测。
由于气泡对光线的散射,图像中气泡边缘有一定程度的光晕和突刺,使得气泡边缘有厚度且不够平滑,同时会使图像区域的光线不均匀,从而产生背景噪声。传统Hough变换应用到本文获得的水中气泡群图像时,累加器中会存在一些多余的附加峰值,使得多余的非气泡圆被检测出来。为了提高检测精度,本文对传统Hough变换进行改进,采用灰度值径向分布筛选法和圆心距离筛选法对累加数组中的峰值进行进一步筛选,滤除不是气泡峰值的附加峰值。
1.2 水中气泡群图像预处理
图像预处理步骤包括图像灰度化、保持边缘滤波和边缘检测。
1.2.1 图像灰度化
灰度图像只有一个通道的数据,可以很好地反映图像的对比度、目标边缘以及形态特征。目前,基于图像的目标识别、目标特征提取的理论与方法基本上是基于灰度图像。因此需要将相机拍摄的彩色RGB图像转换成灰度图像。图5所示为一张灰度化后的气泡图像。
图5 灰度化后的气泡图像Fig.5 Grayscale image of bubble group
1.2.2 保持边缘滤波
为了降低图像中的噪声,需要用平滑滤波器对图像进行处理。
常用的平滑滤波器有算数均值滤波器、几何均值滤波器、中值滤波器。算数均值滤波器和几何均值滤波器能对高斯噪声和均匀分布噪声有较好的抑制效果,但会产生模糊图像的副作用,算数均值滤波器更是会使图像发生很大程度的失真,对于微米级气泡群图像而言,平滑滤波器会削弱气泡的边缘信息,而气泡的边缘信息对后续的特征参数提取有重要意义,且对脉冲噪声的抑制效果较差;中值滤波器能较好地抑制脉冲噪声,但对高斯噪声抑制效果较差[11]。因此,本文对平滑滤波器进行一定的改进,使其在抑制噪声的同时也能尽可能地保留气泡的边缘信息,称为保持边缘滤波器。
保持边缘滤波器的原理为,在待处理像素周围的n×n板块中,选择k个与待处理像素灰度值之差最小的像素,用这k个像素灰度值均值作为待处理像素的灰度值。如图6所示,取待处理像素为中心的3×3板块(图中灰色区域),在板块的9个像素中,求与待处理像素灰度值之差最小的5个像素灰度值均值,作为待处理像素的灰度值[2](图6中,与待处理像素灰度值之差最小的5个像素灰度值分别为114,111,107,124,100;均值为111,于是待处理像素灰度值由114变为111)。

图6 保持边缘滤波器原理示意图Fig.6 Schematic diagram of edge keeping filter
保持边缘滤波器结合了均值滤波器和统计排序滤波器的优点,由于取的是邻域内与待处理像素灰度值差值最小的像素做均值,不会出现两个区域信息的混叠平均,对图像目标及目标边缘的清晰度保持程度较传统的平滑滤波器有明显提高,而且在抑制高斯噪声的同时也对脉冲噪声有很好的抑制效果。滤波前后的灰度图像如图7所示,滤波前后图像的幅度谱如图8所示。由图8可见图像的高频分量得到抑制,而从图7看,气泡的边缘信息得到较大程度的保留,用这种保持边缘滤波的方法在降噪的同时能较好地保持边缘清晰度。

图7 保持边缘滤波前后气泡群图像对比图Fig.7 Images of bubble group before and after edge keeping filtering

图8 保持边缘滤波前后幅度谱对比Fig.8 Amplitude spectra of bubble group before and after edge keeping filtering
1.2.3 边缘检测
边缘检测是基于灰度突变分割图像的常用方法,能够将图像中目标的边缘信息提取出来,为后续目标检测和识别奠定基础。本文采用Canny边缘检测器提取气泡的边缘信息。Canny边缘检测器检测边缘错误率低、边缘点定位精度高、边缘点响应单一,相比于迄今为止开发出的Prewitt、Sobel、Robert等常用边缘检测器,对气泡群图像的边缘检测效果更为优秀[11]。
Canny边缘检测的效果对后续基于Hough变换的气泡识别准确性有很大影响。边缘检测中没有被检测出边缘的气泡,将无法在后续的进一步检测中被检测出来;另外,如果边缘检测中检测出许多噪声边缘,使得边缘像素过多过杂,将会使后续检测消耗大量时间。因此必须提高边缘检测的精度,使图像中气泡边缘能够被识别出来的同时,又尽可能少地将噪声边缘识别出来。对于Canny边缘检测,就是要选好合适的阈值。经过对大量采集到的气泡群图像进行Canny边缘检测实验,对比检测结果可知:当Canny边缘检测的高阈值为0.1、低阈值为0.04时,气泡边缘检测效果最好。图9所示为气泡群图像Canny边缘检测的结果。

图9 Canny边缘检测结果Fig.9 Detected result of Canny edge
1.3 基于改进Hough变换的气泡群特征参数检测
基于改进Hough变换的气泡群特征参数检测,可分为参数空间投票和峰值筛选两个步骤。
1.3.1 参数空间投票
建立一个图像空间(x,y)。圆在图像空间中的表达式如(1)式所示:
(x-a)2+(y-b)2=r2,
(1)
式中:a、b分别为圆心像素在图像空间中的行列坐标;x和y分别为图像空间的行坐标和列坐标;r为圆的像素半径。将(1)式写成(2)式:
(a-x)2+(b-y)2=r2,
(2)
建立一个三维参数空间(a,b,r),图像空间中的每一个像素构成参数空间中的一个圆锥面,所有像素则为一圆锥面簇,如图10所示。对于圆形边界,边界上的点在参数空间中对应的圆锥面将会相交于同一个点(a0,b0,r0),如图11所示。为参数空间中的每一个点(a,b,r)建立一个累加器,每有一个圆锥面经过这个点,则该累加器加1,相当于对点(a,b,r)代表的以(a,b)为圆心、以r为半径的圆进行投票,票数越高表明这个圆存在于图像中的可能性越高。参数空间所有点的累加器构成累加数组,累加数组中大于一定阈值(本文阈值设为0.3)的点为峰值,即为Hough变换检测出的圆[12-15]。在算法实现上,遍历每一个检测出的边界像素,在每个边界像素上求出所有可能的圆心位置,并在该圆对应的参数空间累加器上加1,从而实现对该可能存在的圆的投票。
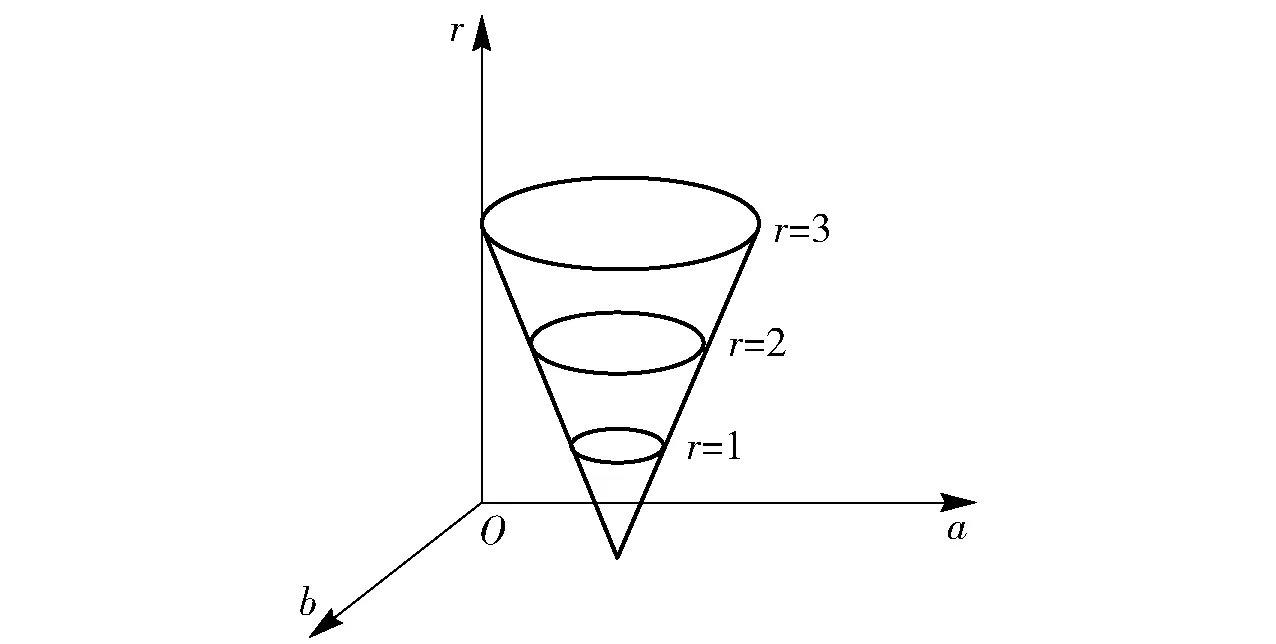
图10 圆周上的点在参数空间中表示为圆锥面Fig.10 Point on the circumference as a circular conical surface in the parameter space
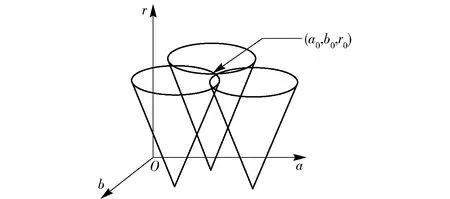
图11 圆在参数空间中表示为圆锥面簇Fig.11 Circle as a conical surface cluster in the parameter space
1.3.2 峰值筛选
为了滤除由于边缘壁厚和背景噪声产生的多余峰值,本文研究了灰度值径向分布筛选法和圆心距离筛选法,并对参数空间累加器中的峰值进行筛选[12]。
1.3.2.1 灰度值径向分布(Trd)筛选法
通过图像中气泡圆心周围像素的灰度径向分布Trd来筛选,Trd可以表示为
(3)
式中:g(x,y)为像素(x,y)的灰度值。将Trd值与一个绝对值比较,当Trd小于该绝对值的峰值时被认为是有效峰值,当Trd大于该绝对值的峰值时被舍弃。经过一系列气泡图像的评估,有效峰值的Trd应小于0.9.
Trd筛选可以有效过滤气泡壁和背景噪声产生的峰值,整体可过滤掉10%~20%的无效峰值。图12所示为经过Trd筛选前后的气泡检测图像。图12中红色的圆表示检测出的气泡,圆的半径即为气泡半径,十字符号表示圆心。

图12 Trd筛选前后对比图Fig.12 Images of bubble group before and after Trd filtering
1.3.2.2 圆心距离筛选法
通过比较每个候选峰与累加器阵列中其他所有峰之间的距离,可以进一步筛选无效峰值。由于图像中气泡拖尾、边缘壁厚等因素,Canny边缘检测出的边缘不一定是严格的圆,会导致在Hough变换中本应属于同一气泡的边缘像素被识别为圆心十分接近的两个气泡,即参数空间中两个十分接近的峰值。检测圆心十分接近的峰值,只保留最可能是气泡的峰值,去除其他峰值,可以过滤掉峰值筛选过程中没有滤除的无效峰值。峰坐标(x1,y1,z1)和(x2,y2,z2)两个圆之间的距离可以用以下公式计算:
(4)
由于图像中气泡拖尾、边缘壁厚等因素产生的冗余气泡的半径一般小于该气泡实际半径,且集中于气泡边缘,是实际气泡圆重叠的小圆。因此可以用以下方法进行圆心距离筛选来滤除冗余气泡:当两圆不发生重叠(即δ-(r1+r2)≥0)时,认为这两个检测出的圆都是有效气泡。当两圆发生重叠(即δ-(r1+r2)<0)时,若重叠宽度小于较小气泡的半径,则认为这两个检测出的圆都是有效气泡;若重叠宽度大于较小气泡的半径,则认为较小气泡是冗余气泡,只保留较大的那个气泡。综上所述,对于检测圆心十分接近的峰值,若满足(5)式,则认为两个峰值所表示的圆都是检测出的有效气泡,否则较大的圆是有效气泡,较小的圆是冗余气泡。
δ-(r1+r2)≥-min (r1,r2).
(5)
圆心距离筛选后留下的圆即是最终检测出的气泡,可以得到每个检测出的气泡质心位置和半径。图13所示为经过圆心距离筛选后的最终气泡检测图像。
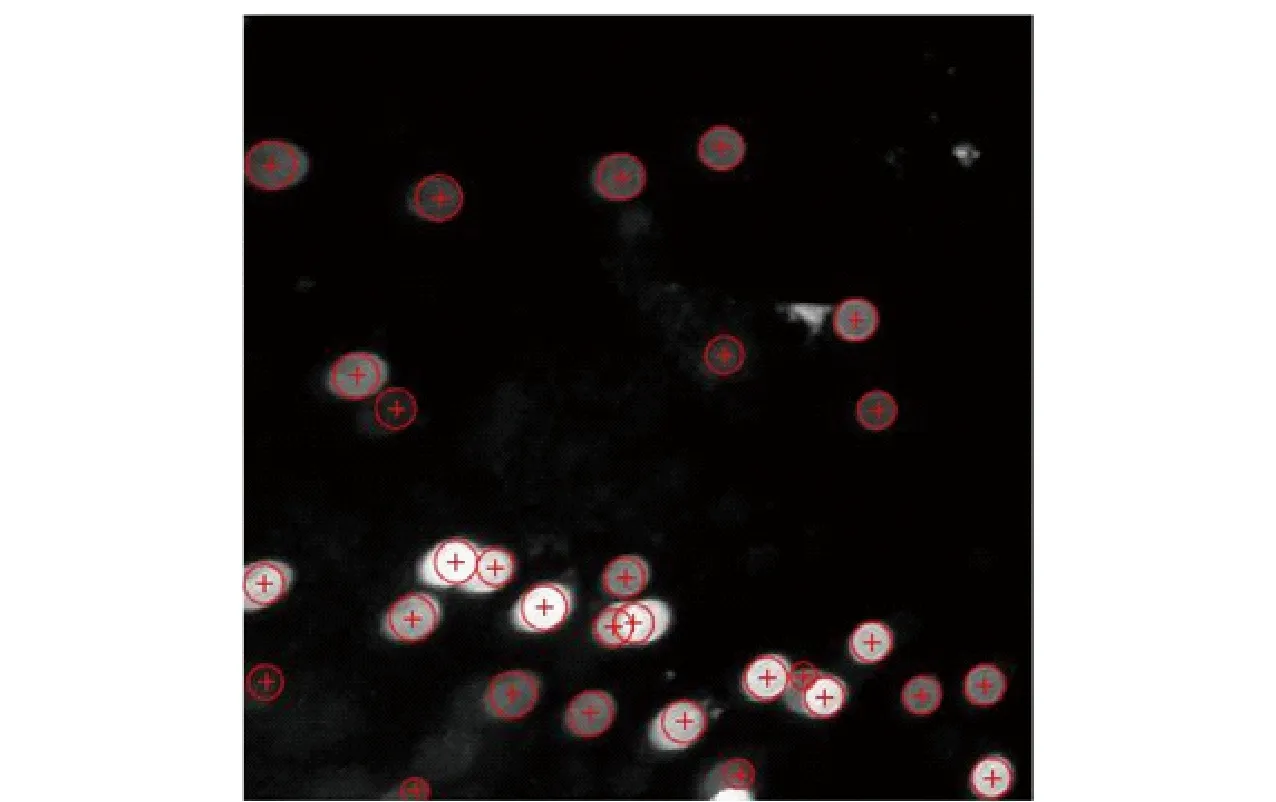
图13 圆心筛选后的气泡检测图像Fig.13 Bubble detection image after center filtering
2 基于改进Hough变换的气泡群特征提取案例
图14(a)~图14(f)所示为6张不同工况下的水中气泡群图像,这些图像中的气泡数密度由小到大,用第1节水中气泡群图像分析方法对这6张图像进行分析,图14(g)~图14(l)分别为图14(a)~图14(f)的检测结果。由图14(g)~图14(l)可见,这6张图片中的气泡都清晰可见,可用人眼分辨出来,因此每张图片中的实际气泡数量用人眼计数得到的气泡数量表示。表1所示为图13(a)~图13(f)所示6张图像用上述图像分析方法识别出的气泡数与图像的实际气泡数的比对情况。1.1节中得到图像中1像素=8.561 μm,光带厚度近似为4 mm,因此拍摄区域体积可用(6)式计算;用检测出的图片气泡数除以拍摄区域体积,可得到气泡群的数密度。图15(a)~图15(f)所示为图14(a)~图14(f)所示6张图像中的气泡半径分布情况。
(8.559×10-6×600)2×(4×10-3)=
1.055×10-7m3.
(6)
从图14(g)~图14(l)的检测结果看,本文气泡群图像分析方法检测气泡的准确度较高,峰值筛选法明显提高了Hough变换检测气泡的准确度,最终检测出的气泡数量、位置和尺寸与图像中实际存在的气泡基本相符,数量检测误差在7%以内。检测误差主要是由于景深导致气泡亮度不一致,离镜头较远的气泡亮度较暗,与噪声的灰度值相当,容易被当作噪声而没有检测出来;另外还有极少数误差是由于Hough变换峰值筛选阶段没有完全过滤掉的无效峰值产生的误差,这类误差会使算法检测出多余的气泡。

表1 气泡数密度检测结果Tab.1 Detected results of bubbles number density
3 结论
本文研究了针对舰船尾流的水中气泡群特征参数提取方法,提出一种基于改进Hough变换的气泡群特征参数检测算法。将实验室采集到的气泡群图像做保持边缘滤波、边缘检测等预处理后,用Hough变换的原理进行气泡检测,进而根据检测出气泡圆心周围像素的灰度值径向分布和圆心距离对气泡进行筛选,这种检测方法与没有峰值筛选的Hough变换相比,能够减少因气泡边缘壁厚和背景噪声而检测出的多余气泡,提高了气泡检测的精度。用上述方法对6张不同工况下的水中气泡群图像进行分析,结果表明该方法在水中气泡群图像特征检测上有较好的效果,气泡数密度检测误差在7%以内,为舰船尾流气泡群特征检测的研究提供了新的思路和手段。
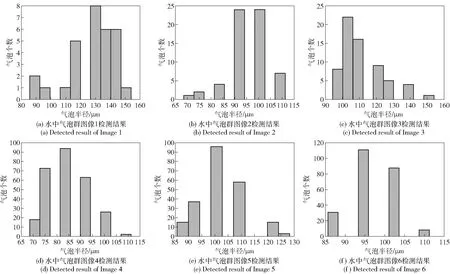
图15 气泡半径分布图Fig.15 Bubble radius distribution