矢量水听器在水下滑翔机上的应用研究
2020-01-08王文龙王超韩梅孙芹东张小川
王文龙,王超,韩梅,孙芹东,张小川
(1.海军潜艇学院,山东 青岛 266199;2.青岛海洋科学与技术国家实验室,山东 青岛 266237)
0 引言
水下滑翔机是20世纪90年代发展起来的一种新型水下无人潜器,它是在自沉浮浮标基础上发展而成的,是一种介于浮标和自主水下航行器之间的剖面测量设备[1]。水下滑翔机作为一种新型无动力无人海洋移动监测平台,具有在位时间长、航程距离远、噪声水平低、隐蔽性能高、成本低、易操作等优点,已经广泛应用于海洋环境监测领域,其平台技术相对成熟,其工作原理是:通过改变自身浮力变化驱动,借助两侧水平翼产生水动力,改变水下滑翔机重心位置以调整运动姿态,实现前进滑翔运动[2-7]。近年来,随着平台、传感器技术及水声信号处理的发展,水下滑翔机在水中目标探测方面的应用得到了快速发展和广泛应用[8-13]。
矢量水听器可以同步共点输出声压标量和质点振速或质点振动加速度等正交矢量,与声压水听器相比提供了更加全面的声场信息,大大提高了声场分析的能力。矢量水听器即具有与频率无关的偶极子接收指向性,也具有一定的抗各向同性噪声能力,利用单矢量水听器可以实现目标全空间无模糊测向,使得矢量水听器在水声探测领域具有独特优势[14-17]。
在水下滑翔机平台上搭载声学系统,构建新型水下声学滑翔机,成为当前研究的热点。本文通过在天津大学Petrel-Ⅱ型水下滑翔机平台上集成矢量水听器声学系统,对声学系统和滑翔机平台各工况下自噪声在消声水池进行测量,分析声学系统自噪声水平和平台主要噪声源,以期根据试验结果指导平台减震降噪处理,并对声学系统工作模式进行优化。为检验水下声学滑翔机的目标探测性能,于2018年5月,在南海海区组织了水下声学滑翔机协同探测试验。试验结果表明:水下声学滑翔机可作为一种潜在的优势水下无人移动探测平台,用于对水中目标进行长期隐蔽探测。
1 水下滑翔机声学探测系统
为提升矢量水听器对水下弱目标信号的检测能力,对矢量水听器各模块进行了电磁屏蔽处理,通过对加速度传感器和压电陶瓷圆管进行单独屏蔽,可实现整体电磁兼容性,从而降低矢量水听器自噪声[18-20]。
为完成矢量水听器接收水声信号的采集、存储、处理和分析,本文研发了一种低功耗和小尺寸的四通道水声信号处理机。水声信号处理机整体功耗约6 W,总容量为64 GB,由电源板、模拟板、数字板以及上位机组成,其中还包括控制、船舶自动识别系统、姿态和调试4个RS232接口以及1个网口用以进行信息传输,网口主要用于水声信号处理机和上位机之间的连接,上位机连接信号处理机后便可对其进行授时、格式化、数据下载和程序更新等操作[8-9]。
图1给出了矢量水听器和水声信号处理机整个声学系统4个通道在消声水池测量得到的自噪声结果,为了便于比较,同时给出了Knudsen曲线在海况0级(SS0)和6级(SS6)条件下的海洋环境噪声谱级。由图1可以看出:1)矢量水听器声压通道自噪声谱级在整个频率范围内小于0级海况海洋环境噪声;2)矢量水听器3个矢量通道自噪声谱级随频率的降低而增大,这是因为矢量水听器矢量通道等效声压灵敏度随频率的降低而减小,频率越低、矢量通道自噪声谱级越大,从而使得矢量通道自噪声在低频段达到最大。
2 水下滑翔机平台自噪声测试
Petrel-Ⅱ型水下滑翔机主要用于海洋环境观测任务,其对平台自噪声考虑较少,而声学系统工作时对水下滑翔机的平台自噪声非常敏感,系统排油、姿态调节及螺旋桨转动等均会产生较大的平台自噪声,并严重干扰矢量水听器信号接收。为了更好地开展声矢量水听器在水下滑翔机平台上的应用工作,有必要对滑翔机平台各工况下的辐射噪声进行测量,得到水下滑翔机的自噪声源分布及其特性,这对滑翔机减振降噪措施的实施和性能改进具有较好的指导意义[10-12]。
一般地,水下滑翔机的平台噪声主要分为机械噪声、螺旋桨噪声和水动力噪声,水下滑翔机在剖面滑翔工作模式下最大水平滑翔速度约为1 kn,且矢量水听器外面有聚氨酯导流罩保护,可将水流噪声的影响控制到很小,因此机械噪声和螺旋桨噪声是水下滑翔机的主要噪声源。水下声学滑翔机在水下进行预警探测任务时,主要采用剖面滑翔工作模式,只有发现可疑目标紧急上浮报警以及遇到其他突发状况时才会启动螺旋桨,因此水下声学滑翔机在进行水下目标探测时可忽略螺旋桨噪声的贡献。机械噪声是水下滑翔机平台噪声的主要噪声源,在整个滑翔机剖面滑翔工作阶段,姿态调节装置和浮力调节装置为主要机械噪声源,其中姿态调节装置包括俯仰调节和横滚调节两部分。滑翔机俯仰调节是通过沿平台中轴线前后移动电池包进行俯仰角调节,实现平台上浮和下潜运动,横滚调节机构则通过绕平台中轴线转动电池包进行横滚角调节,当滑翔机航向偏离计划航向时来完成航向控制。水下滑翔机下潜至最大剖面工作深度时,油泵电机上电开始工作,并将液油排到油囊来增加平台的浮力,使滑翔机完成由下潜到上浮的过渡控制。
为进一步对Petrel-Ⅱ型水下滑翔机平台自噪声的基本特性进行深入分析,定量描述平台各噪声源的贡献,在国家深海基地管理中心消声水池进行水下滑翔机各工况条件下的自噪声测试,消声水池的尺寸:长×宽×深为16 m×8 m×8 m,自噪声采集系统包括矢量水听器和水声信号处理机,矢量水听器负责接收平台噪声信号,水声信号处理机负责信号的采集、存储、处理和分析。图2给出了水下滑翔机电池滑动、油泵启动、电池转动和螺旋桨1 kn转动4种工况条件下噪声谱级与消声水池背景噪声级的比对结果,图2中的处理结果是由安装在滑翔机头部的矢量水听器接收各工况下噪声数据并采用1/3倍频程谱计算方法处理得到的。由图2可以看出,滑翔机4种工况条件下产生的噪声谱级均明显大于消声水池背景噪声,且在800~1 000 Hz频段范围内,由滑翔机油泵启动产生的辐射噪声存在一个很高的平台峰,该平台峰对应的噪声谱级在4种测试工况中最大。
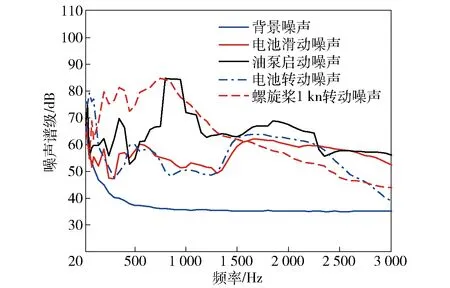
图2 水下滑翔机平台噪声谱级Fig.2 Noise levels of underwater glider platform
由图2可知,水下滑翔机平台上集成的矢量水听器在滑翔机电池滑动、油泵启动、电池转动和螺旋桨转动工况下均会受到严重的近场干扰,特别是在油泵启动和螺旋桨转动两种工况下,弱目标信号将被滑翔机平台产生的自噪声所掩盖而无法正常进行目标探测,因此水下声学滑翔机在水下进行探测任务时俯仰调节机构、油泵电机和螺旋桨要停止工作。由于滑翔机需要实时调整航向,横滚调节机构无法停止工作,后续需要对滑翔机横滚调节机构进行减振降噪处理来降低平台自噪声水平。在第3节滑翔机第4剖面试验过程中,设置滑翔机平台横滚电机不工作,即在滑翔机剖面滑翔过程中不对平台航向进行调节,来消除横滚调节机构对声学系统的噪声影响。
3 南海试验数据分析
3.1 试验说明
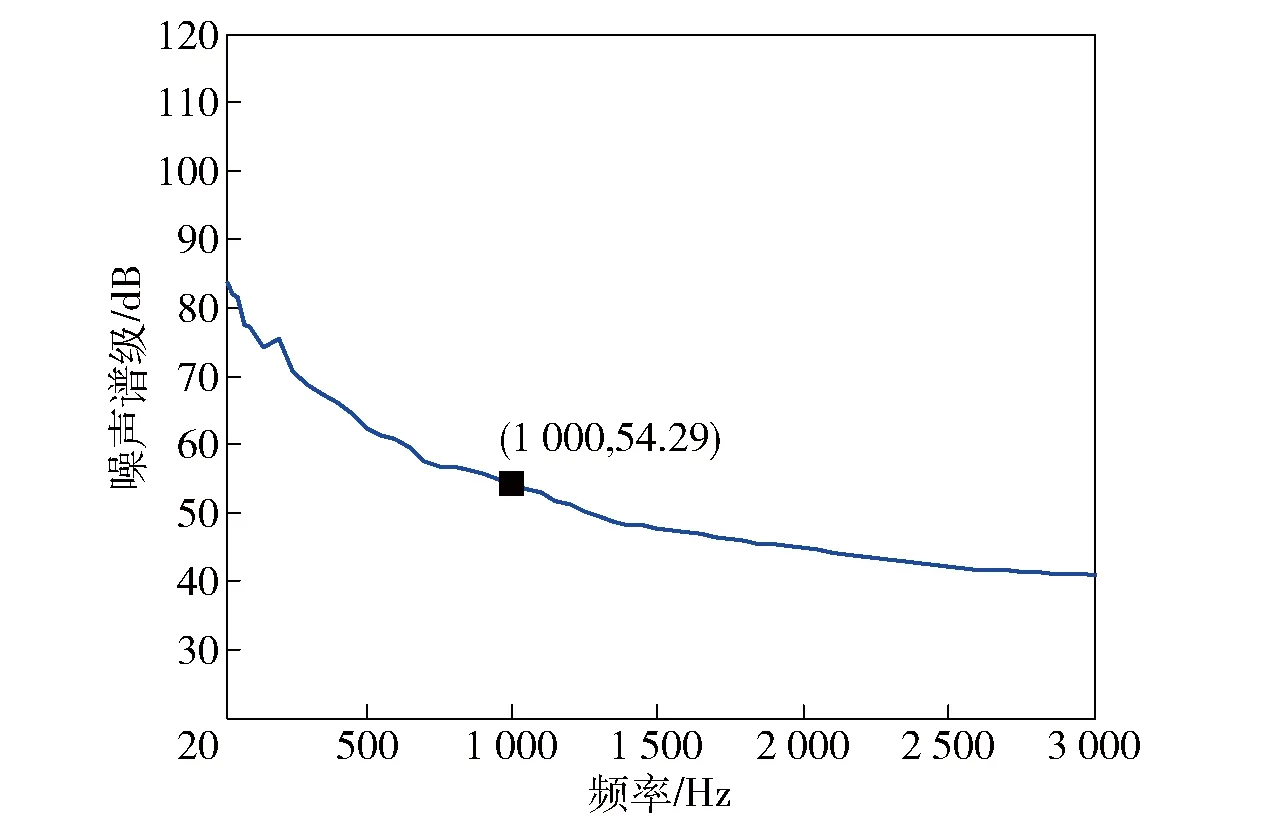
图3 试验期间海洋环境噪声谱级Fig.3 Ambient noise level during the experiment
2018年5月,在南海某1 500 m海深区域开展了水下声学滑翔机位置协同探测试验,滑翔机采用剖面滑翔方式工作,设置最大下潜深度600 m.试验海区海底为平坦的泥沙底质,试验期间海况较好约为2级,海洋环境噪声谱级约为54 dB@1 kHz,如图3所示。图4给出了用温盐深剖面仪测量得到的声速剖面。

图4 试验期间声速剖面Fig.4 Sound velocity profile during the experiment
3.2 滑翔机横滚电机工作
图5给出了水下滑翔机剖面滑翔工作期间平台深度随时间的变化情况。由图5可以看出,滑翔机平台在9:00~21:00时间段内工作4个剖面,其中,第1个工作剖面设置水下滑翔机发现目标后上浮,第2、3、4个工作剖面设置水下滑翔机发现目标后不上浮,全程采集声学信号,水下滑翔机剖面滑翔工作期间平台最大下潜深度约560 m,一个剖面时长约3 h,其中滑翔机排油调整姿态和浮力阶段水下滑翔机声学系统断电停机约10 min.
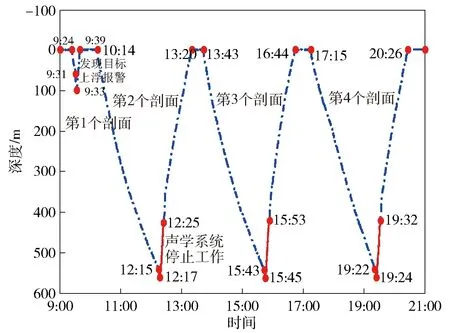
图5 滑翔机平台深度随时间变化Fig.5 Glider platform depth change over time
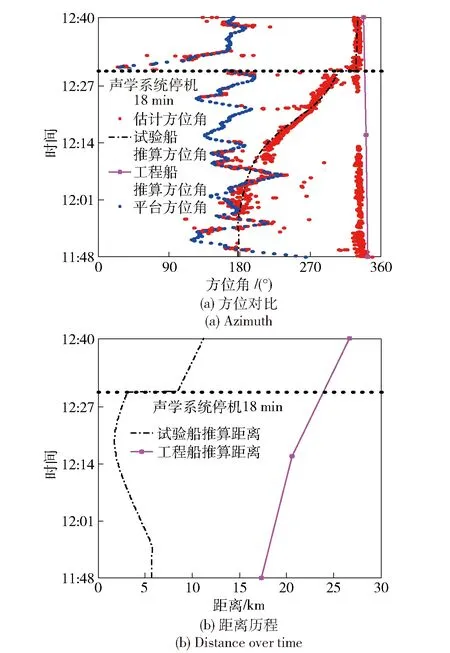
图6 噪声估计方位与目标推算方位对比及距离历程Fig.6 Comparison of estimated noise orientation and calculated target azimuth and distance over time
图6给出了水下声学滑翔机在11:48~12:40时间段内接收到的附近水面航船(试验船和工程船)噪声信号估计方位与推算方位对比图,以及滑翔机平台和水面航船在此时间段内的距离历程图,其中12:15~12:25时间段内滑翔机排油调整姿态和浮力阶段声学系统断电停止工作。图7为航船噪声估计方位历程伪彩图。图8给出了11:48~12:40时间段内滑翔机平台的姿态角随时间变化情况,其中航向角0°为滑翔机平台头部指向正北方向,顺时针转1圈航向角从0°~360°;横滚角0°为滑翔机水平放置,从滑翔机尾部朝头部方向看,横滚角向左滚转到180°、向右滚转到-180°;俯仰角0°也为滑翔机水平放置,滑翔机头部向下俯仰角到90°,滑翔机头部向上俯仰角到-90°.由图8可以看出:航向角和横滚角在整个11:48~12:40时间段内不断进行调整,而姿态俯仰角只在滑翔机平台最大工作深度处发生变化,其中航向角输出对应滑翔机平台与矢量水听器连线相对于正北方向的方位;姿态俯仰角输出对应滑翔机平台的俯仰角变化,俯仰角为正值表示滑翔机平台头部朝下做剖面滑翔,俯仰角为负值表示滑翔机平台头部朝上做剖面滑翔;姿态横滚角输出对应滑翔机平台横滚变化情况,当滑翔机航向角偏离计划航向时,滑翔机横滚调节机构就会工作(电磁抱闸调节横滚角)来调整滑翔机平台航向角,这期间会产生较大的平台噪声干扰。图9所示为11:48~12:40时间段内试验船、工程船与滑翔机平台相对位置态势图。图10给出了滑翔机横滚调节机构工作时矢量水听器声压通道接收到的时域信号波形。从图10中可以明显看出由电磁抱闸而产生的噪声脉冲干扰。
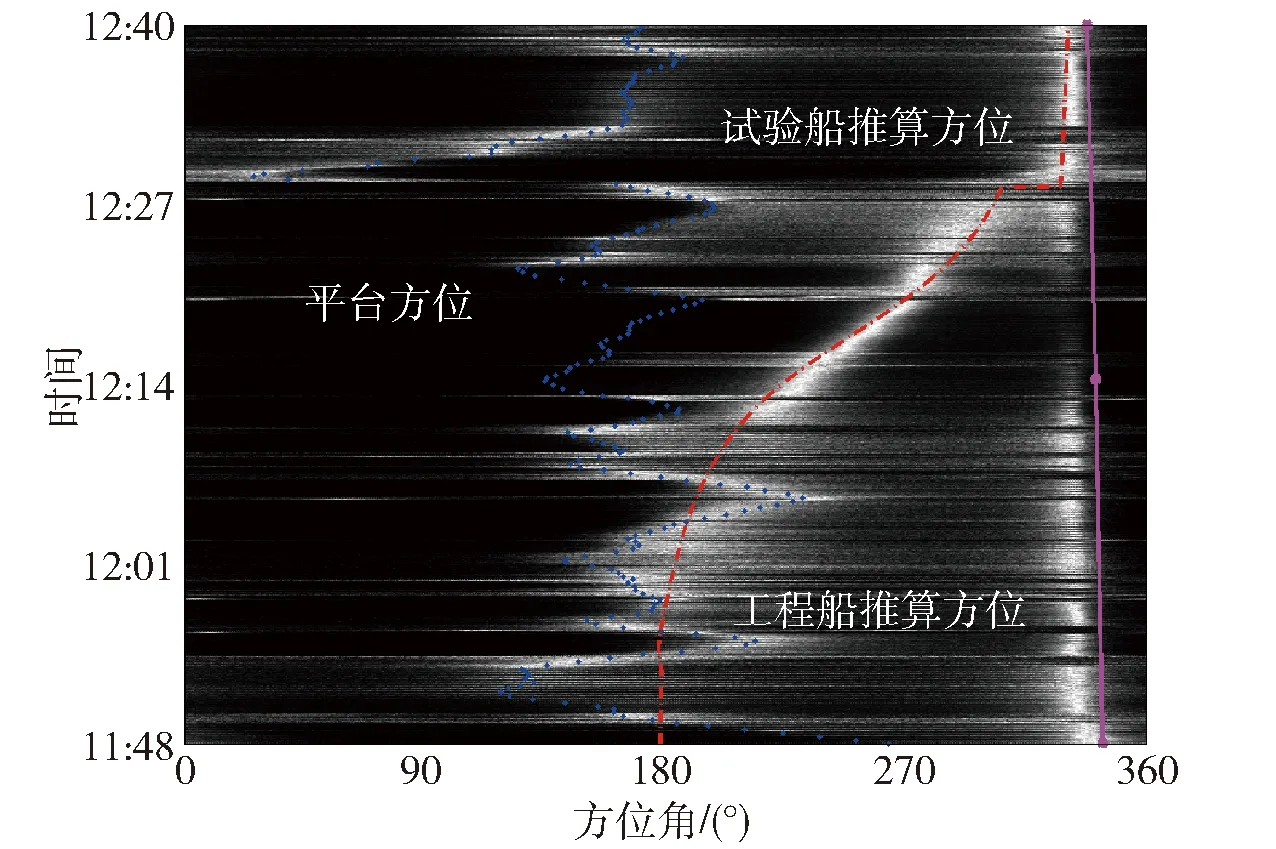
图7 航船噪声估计方位历程伪彩图Fig.7 Pseudo-color image of estimated ship noise azimuth
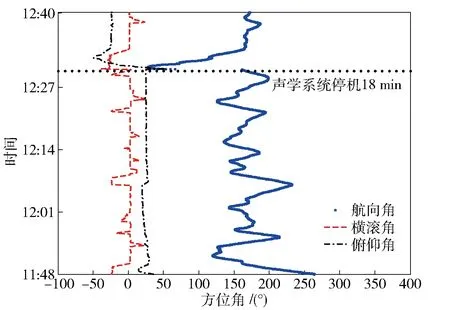
图8 水下滑翔机平台姿态角随时间变化Fig.8 Change of underwear glider attitude angle with time

图9 滑翔机与试验船和工程船的相对运动态势图Fig.9 Relative motion among glider platform,trial ship and engineering ship

图10 抱闸干扰时段时域信号Fig.10 Original signal during brake interference
从图6和图7中可以看出,11:48~12:40时间段内,滑翔机声学系统除了接收试验船和工程船噪声信号外,还受到了滑翔机平台间歇性抱闸噪声干扰影响,严重影响了滑翔机声学系统的探测性能。
3.3 滑翔机横滚电机不工作
在航向调节过程中,由于水下滑翔机横滚调节机构工作会产生较大的间歇性抱闸噪声,声学系统受到严重平台噪声干扰影响,在滑翔机第4剖面试验过程中设置滑翔机平台横滚电机不工作,在剖面滑翔过程中不对航向进行调节。
图11给出了水下声学滑翔机在17:20~19:10时间段内声学系统计算输出的航船噪声估计方位历程与推算方位历程对比图,以及试验船和工程船相对于滑翔机平台距离历程图。图12给出了航船噪声估计方位历程伪彩图。通过查看船载船舶自动识别系统在17:20~19:10时间段接收到的水面航船信号,发现滑翔机平台附近只有工程船和试验船两艘航船,工程船在17:20~18:50时间段内航速6.2 kn航向63°,在18:50~19:10时间段内航速6.2 kn航向10°;试验船在17:20~17:46时间段内停止,17:46~19:10时间段内航速10 kn航向340°.图13给出了17:20~19:10时间段内试验船、工程船与滑翔机平台相对位置态势图。
由图11和图12可以看出,在17:20~17:50时间段内,水下滑翔机主要接收工程船噪声信号,计算方位为工程船目标方位,此时间段工程船距离滑翔机平台最远达30 km.在17:50~19:05时间段内(试验船航速10 kn航行),水下滑翔机主要接收试验船航船噪声信号,计算方位为试验船目标方位,但受工程船噪声干扰,以及滑翔机平台推算位置不精确,试验船目标计算方位与推算方位间存在一定偏差,此时间段内试验船距离滑翔机平台最远达14 km.在19:05~19:10时间段内,由于航速6.2 kn的工程船(距离43.4 km)噪声信号强度大于航速10 kn的试验船(距离16.3 km)噪声信号,水下声学滑翔机计算方位为工程船目标,但此时工程船与滑翔机平台距离较远,声学系统接收航船目标信噪比较低,因此目标计算方位与推算方位间存在较大偏差。由以上分析可知,在无滑翔机平台间歇性抱闸噪声干扰影响情况下,水下滑翔机对航速6.2 kn的工程船目标最远探测距离可达30 km,而对航速10 kn的试验船目标最远探测距离大于14 km.

图11 噪声估计方位与目标推算方位对比及距离历程Fig.11 Comparison of estimated noise orientation and calculated target azimuth and distance over time
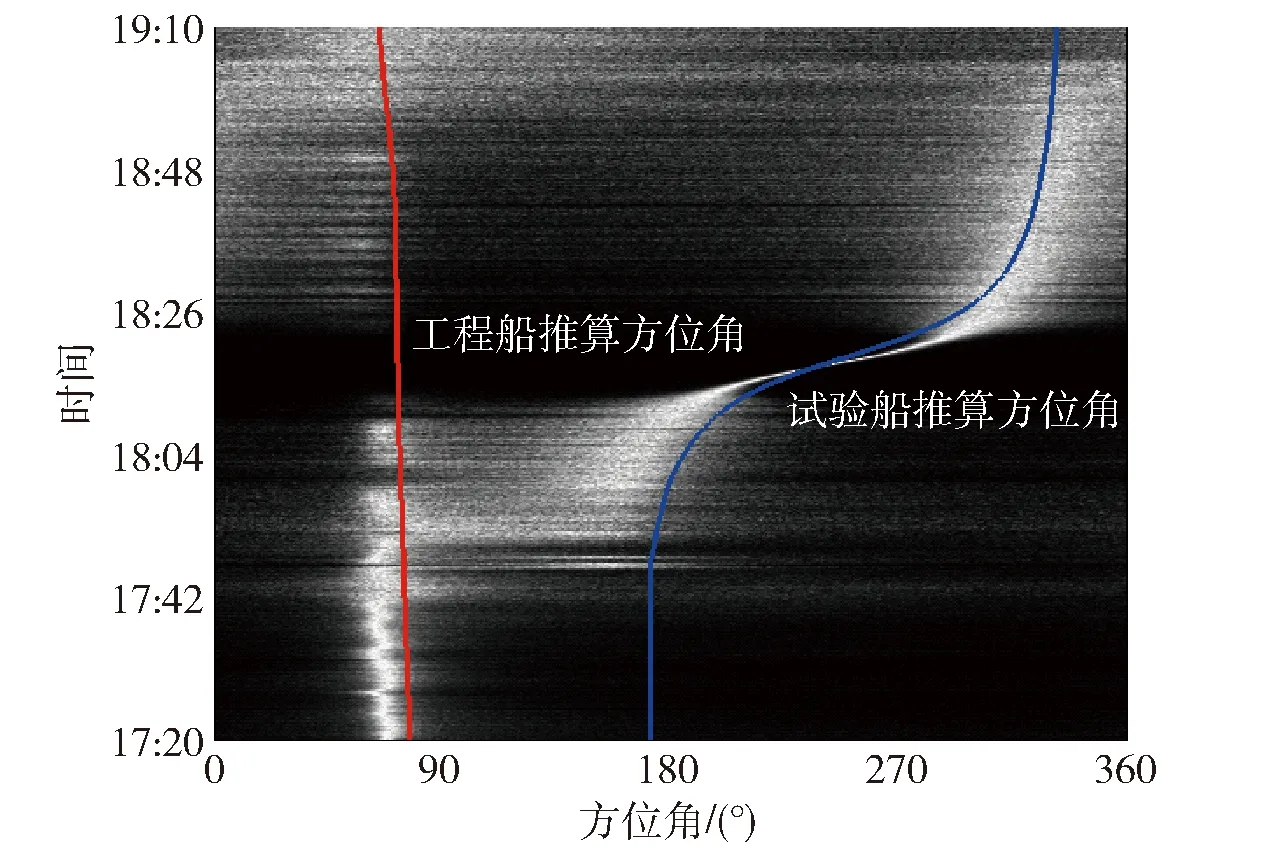
图12 航船噪声估计方位历程伪彩图Fig.12 The color map of ship noise estimation azimuth

图13 滑翔机平台与试验船和工程船的相对运动态势图Fig.13 Relative motion among glider platform,trial ship and engineering ship
4 结论
本文将单个矢量水听器与水下滑翔机平台相结合,构建了一种具有目标探测能力的新型水下滑翔机,并定量测试分析了滑翔机声学系统自噪声水平和平台主要噪声源。2018年5月南海试验结果表明:1)水下滑翔机航向调节机构在进行横滚角调节完成平台航向控制过程中,声学系统会受到严重的间歇性抱闸噪声干扰影响;2)在无滑翔机平台噪声干扰影响情况下,水下声学滑翔机对航速10 kn的配合水面航船目标最远探测距离大于14 km.本文工作对推动我国水下无人平台用于目标探测应用具有显著意义。