并联泵组的多目标控制策略
2020-01-02
(中北大学 机械工程学院,山西 太原 030051)
社会经济的发展带来了各行各业供水需求的增加,而供水系统在输送和提升过程中需要消耗大量能量。欧盟委员会的调查显示,泵送系统占全球电能输送系统的近22%[1],其节能运行将带来极大的经济效益。
目前泵送系统的节能优化主要为控制的改进,作为典型的混合整数非线性规划问题[2],其多变量耦合等特性令供水需求和泵组高效率运转难以同时实现。常见的模型大多以单一的最低流量差[3]、最低能耗[4-5]或最高效率[6-7]为目标,其余目标皆作为约束,这类模型为单目标规划模型。为利于求解,一般会简化水泵高效区以减少约束[3],或者根据实验数据制作最佳泵数表[8],通过查表可以快速获得最佳工作泵数量以减少决策变量。相比普通多目标规划,这类模型求解速度快,但不能把控各个目标间的权重,在不同的工况下,只能保证所求为非劣解,而非最优解。少数的多目标控制模型多是采用免疫遗传算法[9-11]、多目标蛙跳算法[12-13]和改进的粒子群算法[14-16]等智能算法,但是这类算法大多较为复杂,需要依赖大量数据,难以直接移植和应用于中小型工程项目。
本文综合考虑了最低流量差和最高效率两个目标,利用加权法来简化目标函数。同时,根据水泵效率图建立了“扬程-理想流量”表,通过查表即可实现对高效率的追踪,并建立了适应工况、自主调节权重的最优控制模型。
1 并联泵组多目标控制模型
泵组控制模型是通过确定工作泵的数量和转速来满足供水需求,同时能保证水泵在最佳工况点附近工作。想要综合考虑并联泵组的最小流量偏差和泵组高效运转这两个目标,就需对其进行无量纲化,同时建立合适的函数来评价不同的组合。为此,建立目标函数如下:
(1)
式中,α,β为正系数,分别为流量差和高效率的权重,如果α越大,表示对供水目标最小流量偏差的需求越高,其中α+β=1;i为水泵编号,共n台水泵并联,1≤i≤n;Qi,Qi·need,Qi·bep分别为水泵i的待求工作流量、目标流量和理想流量,m3/h。
1.1 目标流量
单泵i的目标流量根据泵组总目标流量QAneed(m3/h)和各泵的工作情况Xi(水泵工作为“1”,否则为“0”)来决定。具体如下:
(2)
在已知泵组的目标扬程Hneed(m)的前提下,通过管网特性曲线,可以求得相应的泵组总目标流量QAneed。管网特性曲线一般表示形式如下:
H=hs+Sf·Q2
(3)
式中,hs为系统静扬程,m;Sf为管网阻力系数。
考虑到管网特性的实时变化,为保证对变工况的适应性,给系统加入前馈,令式中Sf和hs由下面两式进行实时求解:
(4)
(5)
式中,Ht-1,Ht-2为t-1和t-2时刻的扬程,m;Qall·t-1,Qall·t-2为t-1和t-2时刻的总流量,m3/h。
由于泵组内各泵型号相同,且相同工作频率下泵组的总效率最高[17],因此可将式(2)简化如下:
(6)
1.2 理想流量
本文实验基于5台Ebara CDX 120/12型水泵并联的供水平台开展。在变转速条件下,水泵制造商提供的额定工况效率曲线图不太精准,需要测定变转速下的效率图。图1为Ebara CDX 120/12型水泵在变转速下的效率图[18]。

图1 Ebara CDX 120/12的变转速效率示意Fig.1 Variable speed efficiency of Ebara CDX 120/12
图1中,曲线AB、DC分别为50 Hz和35 Hz情况下水泵的特性曲线。在此调速范围内,泵基本符合相似定律,且能保持较高的效率[19]。曲线AD、EF、BC为等效率曲线,可由H=a·Q2(a为系数,代入曲线上任意点求出)求得,在一定范围内,曲线上的工况点的效率近似相等。
效率图近似以曲线EF为中轴线对称分布,而曲线的EF段为不同扬程下最高效率点的集合。但是当扬程处于A、E两点间或F、C两点间时,高效区ABCD内,工况点的效率随着朝曲线AE和FC的逼近而提高。因此,可设曲线段AE、EF、FC为理想流量曲线。曲线段AE、FC隶属于50 Hz和35 Hz情况下的水泵特性曲线,可由下式求得:
H=ω2·hshut-Sloss·Q2
(7)
式中,ω为调速比,ω=ni/nrated(ni、nrated分别为实际转速和额定转速,r/min);hshut为水泵截断扬程,m;Sloss为扬程损失系数,可通过拟合制造商提供的额定曲线求得。
EF段处于等效率曲线H=aQ2上,综上所述,理想流量曲线表达式如下:
(8)
由上式可见,理想流量曲线为较复杂的分段函数,不宜直接作为模型的约束。因此,直接对等间隔的H求解函数,并制成“扬程-理想流量”的表格。最终求解模型时,可以直接查表,从而减少了约束。表格数据间隔中的数值可利用线性插值获取。
1.3 约束条件
泵组运行需要考虑的约束条件分别有流量约束、扬程约束、效率约束和功耗约束。
流量约束即单泵流量之和与目标总流量相等,即式(6),在计算Qi·need时已经考虑过,此处可略去。并联泵组的扬程约束需要各泵扬程相等:
Hi·need=Hneed(i=1,2,…,n)
(9)
鉴于文献[18]的效率图已经考虑过效率和功耗,因此效率约束和功耗约束可统一由对单泵工况点的限制来实现。而对高效点即理想流量的逼近已在目标函数内完成,此处只需针对转速比、与理想流量点的距离和最终流量差进行约束:
0.7≤ω≤1
(10)
(11)
(12)
式中,λ和θ为系数,此处皆取0.3,以保证泵在高效区工作和贴近目标流量[7]。
1.4 流量偏差与效率的权重
流量偏差与效率的权重的设定将极大地影响最优解的取值,通过实验结果可以确定其值的选择。本次研究设定泵组数量n=5,管网曲线hs=7.083 m、Sf=0.029 35。令供水目标(QAneed,Hneed)分别为(10,10.018)、(15,13.6 868)、(20,18.823)、(25,25.4 268),在不同的权重下,使用优化模型求解软件LINGO[20]进行求解,结果如图2所示。

图3 不同目标不同权重下解的评价Fig.3 Evaluation of solutions for different targets with different weights

图2 不同约束下解的分布Fig.2 Distribution of solutions under different constraints
在现有约束下,模型的解“×”分布范围较窄,集中在高效率区域。在Hneed为10.018 m时,11种权重变化只有2种解;其他情况下,解的差距也不大,权重对解的影响极低,推测为约束过多。
与之对比,取消式(11)和式(12)的约束,求解结果如图2所示。在主要靠权重进行调控的情况下,当Hneed为10.018 m时,解的数量上升至5种;其余情况下,解的分布范围也有了极大的提升。而除去α为1时(完全追求最小流量偏差)出现的a~d几个低效率解外,其余解的分布也与有约束时的重叠,当扬程较高时,重叠现象更为显著。可见,约束在低扬程时有很大影响,在扬程较高时,影响较小,因此,可以利用对权重的约束来替代式(11)和式(12)对理想流量点的距离和最终流量差的约束。
对减少约束后的数据进行处理。处理时,设定目标函数结果为评价值V、单泵效率E和最终流量差ΔF。ΔF由式(13)求出。对评价值V、单泵效率E和最终流量差ΔF3种评价指标进行归一化,结果图3所示。
(13)
如图3所示,随着流量差权重α的增加,效率E、流量差ΔF降低,评价值V先增加后减小。而模型以流量差、高效率点距离的平方和作为目标函数,评价值V越低,模型的解越优异。若由模型自主选择权重搭配,最终结果会偏向α为1(只考虑最小流量差)或α为0(只考虑高效率)的解,前者偏向于增加水泵数量低效率运转,后者的工作泵数量为0。这两种极端权重下的解往往不是较优解,甚至是非有效解,因此模型的目标函数需要改进。
2 模型的改进
考虑到模型为混合整数非线性规划(Mixed-Integer Nonlinear Programming)模型,多采用线性加权法、极大极小法和几何加权法等来构造评价函数。随着权重的变化,几何加权法的结果比线性加权法更符合极小值模型[21]。因此,将目标函数式(1)优化为
(14)
式中,α和β为正系数,α+β=1。
再次求解,结果如图4所示。几何加权下,解的分布范围几乎与线性加权的相当,除了a点处范围更大以外。同时,几何加权下解的数量较少,且主要集中在高效率区范围内,除了α为1时的几个低效率解外,解的分布与式(11)和式(12)约束的线性加权法相类似。可见,几何加权情况下求得非劣解的可能性更高。同样,对几何加权情况下的相关评价指标进行归一化,结果如图5所示。
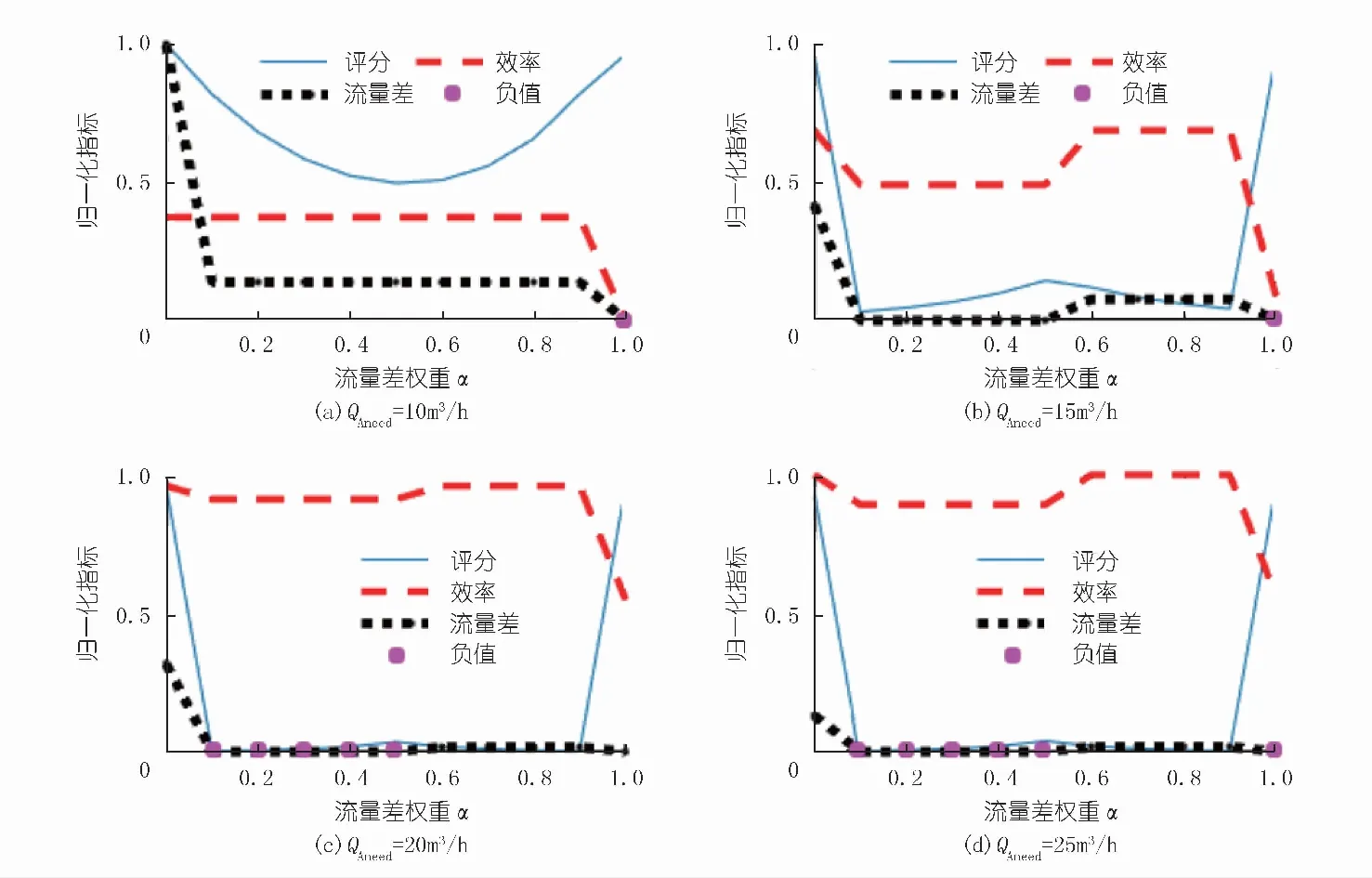
图5 几何加权下解的评价Fig.5 Evaluation of solutions under geometric weighting

图4 不同加权方式下解的分布Fig.4 Distribution of solutions under different weighting schemes
由图5可以看出,评价值V在流量差权重α为0和1两种极端情况下达到最高点,前者偏向于启动所有泵(n=5),在低目标流量时造成极大的流量误差,不是有效解;后者所求为非劣解,但只考虑流量差,模型给予的评价较差。其余情况下,评价值V较低,总体呈现“U”型,模型达到了综合考虑流量差和高效率的目的。除了目标总流量QAneed为10 m3/h以外,其余3种情况下,评价值V皆在α为0.5处出现了次高点,表明系统默认对α为0,0.5,1.0的3种组合作出的较低评价。若是不考虑对权重添加额外的约束,由模型自主选择权重搭配,则最终结果随着总流量的提升,逐步由向图5(a)的单极点变为向图5(b)~(d)的双极点靠拢。图5(c)~(d)虽然无明显极点,但趋势基本呈“W”型。
可以预测,目标总流量QAneed为10 m3/h时,权重偏向α=0.5;QAneed为15~25 m3/h时,权重偏向α∈(0,0.4)∪(0.6,1)。
当前模型所求解的流量差ΔF皆为正值或极限接近0的负值,而线性加权下存在高效率但流量差ΔF为较大负值的解。可见,除了α为0和1两种极端情况外,其余权重比得到的解皆为非劣解。因此,可令模型自主决定权重比。为此,添加权重比约束如下:

(15)
再次求解,结果如表1所示。可见,QAneed为15 m3/h和20 m3/h时,α权重偏向于1,但β对高效率的约束令工作泵数n处于合理范围。4个目标下,结果皆为非劣解。

表1 几何加权下自主选择权重的求解结果Tab.1 Solution results under geometric weighting and autonomous selection weights
3 实验对比
利用改进的Cohen G.最小流
量偏差效率优化模型[3]和效率导向泵组预测控制模型[8],对并联泵组工作区的7个典型工况点进行了求解,3种模型的求解结果如表2所示,评价对比情况如图6~7所示。
结合图表可见,在不同供水目标下,多目标与效率主导模型的调速比ω相同,但多目标模型的工作泵数量n较高,相较于效率主导模型,多目标模型的效率E会有些许下降;但是由图7可以看出,多目标的流量差ΔF全部为正,相比效率主导模型来说较为符合需求。多目标与最小流量差模型的工作泵数量n基本一致,调速比ω较高,效率E相对较高;流量差ΔF方面,最小流量差模型在目标流量为10~17.5 m3/h时,流量差ΔF为超过20%的负值,不贴合目标需求。综合多目标模型所求解的评价指标,可以确定:当前的模型满足适应工况、自主调节权重的求解要求。

表2 不同目标下3种模型结果Tab.2 Results of the three models under different targets

图6 3种模型的效率比较Fig.6 Comparison of the efficiency of the three models

图7 3种模型的流量差比较Fig.7 Comparison of flow differences between the three models
4 结 论
本文针对现今单目标泵组控制系统无法求出变工况条件下最优解的问题,构建了适应工况、自主调节权重的多目标控制模型,并得出如下结论。
(1) 利用几何加权法构造系数在求解最小值时能保证所求解为非劣解。相较于线性加权法,几何加权法在求解多目标最小值问题上更符合实际。
(2) 利用“扬程-理想流量”表来追踪高效率目标,可以有效地简化模型目标函数和约束,降低模型的复杂度。
(3) 并联泵组多目标控制模型总体偏向于高效率,在低流量低效率区域,能够综合考虑效率和流量差;在高流量高效率区域能够优先考虑效率,而且能提供足够的流量来满足需求,符合实际工程的需求。