激光导引头低温输出特性分析及补偿方法研究*
2019-12-28马军伟
张 琪,马军伟,梅 磊,杨 涛,刘 扬
(西安北方光电科技防务有限公司, 西安 710043)
0 引言
近年来,通过国内外的快速发展,半主动激光制导技术日益成熟,尤其是外贸市场的蓬勃发展给激光武器的研发、生产带来了前所未有的机遇和挑战。面对以上竞争和挑战,国内也在多个口径多个平台领域开发了激光制导技术及产品,随着现代战争的演变,对激光武器的发展提出了新的要求[1],包括提高武器攻击能力、提高机组人员及载机安全性、降低成本和后勤维护费用。
激光导引头通过对光学系统探测的目标位置进行分析运算,驱动陀螺修正系统减小失调角,同时输出跟踪角速度用于引导导弹向目标进动。因此,跟踪角速度输出精度直接影响导弹命中精度,是导引头的关键技术指标之一,其调试方法包括硬件调试法和软件调试法。随着大规模集成电路的应用以及导引头模块化的设计,综合指标的计算多采用软件调试法。为了保证导引头输出精度,针对温度条件通过软件写入的方式分别设置了两个参数调试通道,文中着重对批量产品低温条件下输出特性进行分析以给出低温补偿参数设置方法。该方法适用于修正系统性能随温度变化的激光类导引头,该方法的应用提高了跟踪角速度调试效率,保证产品质量一致性,为外贸市场的竞争提供更多的优势。
1 激光导引头的使用要求
导引头是导弹的重要组成部分,由于导弹的部署范围广泛,不同地域、季节的温度差异(低温-40 ℃以下,高温60 ℃以上)是导弹不得不面临的巨大挑战[2],因此对导引头提出了严格的使用要求。文中所述激光导引头采用了模块化和集成化设计,针对关键指标设置了数字化软件调试窗口以满足跟踪角速度输出精度。通过对激光导引头的总体需求及检测需求分析,提出了以下3点使用要求,保证产品实现精确导引。
1)常温25 ℃输出精度±15%以内,角速度测试需求1°/s、3°/s;
2)低温-40 ℃输出精度±15%以内,角速度测试需求1°/s;
3)高温+50 ℃输出精度±15%以内,角速度测试需求1°/s。
在批量生产过程中发现上述第2)条输出精度的调试合格率仅35%,通过初步分析主要是导引头在低温条件下输出性能衰减引起,针对该问题进行了低温特性的影响性分析和补偿方法研究。
2 激光导引头的低温特性分析
2.1 低温特性分析
激光导引头的功能如图1所示,组成如图2所示,其主要实现了对目标失调角的修正及视线角速度对外输出两个功能。根据制导需求,激光导引头全温工作条件下输出精度控制在±15%以内。根据导引头组成分析,由于修正回路上包括线圈、电阻、集成电路等多种元件,随着温度的下降各模块性能也有所下降,最终导致了低温性能的衰减(如图3、图4所示)而达不到制导精度的控制要求。
图1 激光导引头功能示意图
图2 激光导引头组成示意图
图3 导引头输出特性
2.2 影响原因分析
激光导引头对失调角的修正主要通过修正信号加载在线圈上并与磁钢相互作用产品磁力矩,推动陀螺向目标方向进动。通过计算修正电压(公式(1))可知,修正信号UOK的大小与线圈的匝数、线圈的面积、通过线圈的磁通量、陀螺的转动惯量、陀螺的转速、线圈的截面积、线圈电阻阻值相关。对于同一个产品而言线圈的匝数、线圈的面积、通过线圈的磁通量、陀螺的转动惯量、线圈的截面积随温度变化微乎其微,可以忽略。主要影响修正信号输出幅值变化的是陀螺转速Ω、线圈电阻阻值R两个因素。
(1)
式中:N为线圈的匝数;L1·L2为线圈的面积 [cm2];Φm为通过线圈的磁通量 [Wb],实测为Φm=0.83×10-6Wb;JX为陀螺在X轴上的转动惯量 [g·cm·s2];Ω为陀螺的转速 [rad/s];a·b为线圈的截面积 [cm2];R为线圈电阻阻值[Ω];UOK为修正电压[V] 。
图4 导引头输出精度
针对线圈电阻及陀螺转速进行了低温特性试验,首先选取10只线圈(编号为线圈1、线圈2……)分别在常温和低温条件下进行了电阻阻值检测,结果如表1所示。通过试验分析,线圈阻值随温度的变化率为16.6%~20.4%。其次,针对陀螺转速,初始速度是由陀螺组件内安装的储能元件释放得到,由于储能部件将能量释放完后,陀螺转子不再补充新能量,因此,随着时间的延长陀螺转速按照近似于线性规律下降[3]。根据工作要求初始速度需65~72 rad/s,工作15 s后需保持54~58 rad/s,按照式(1)计算陀螺转速衰减对修正信号的影响变化率为16.9%~19.4%。陀螺转速随温度变化情况主要与零件材料温度系数、陀螺装配间隙、摩擦系数有关,导引头位标器组件一旦装配完成,陀螺转速在导引头调试过程中无法进行控制。
综上分析,激光导引头单位角速度低温输出特性的衰减与线圈及陀螺转速在低温条件下的物理特性相关,是导引头的固有属性。因此亟待研究一种适合导引头全温度范围输出斜率补偿的数学算法,使导引头输出斜率的期望稳定,可确保导弹命中概率的进一步提高[4]。
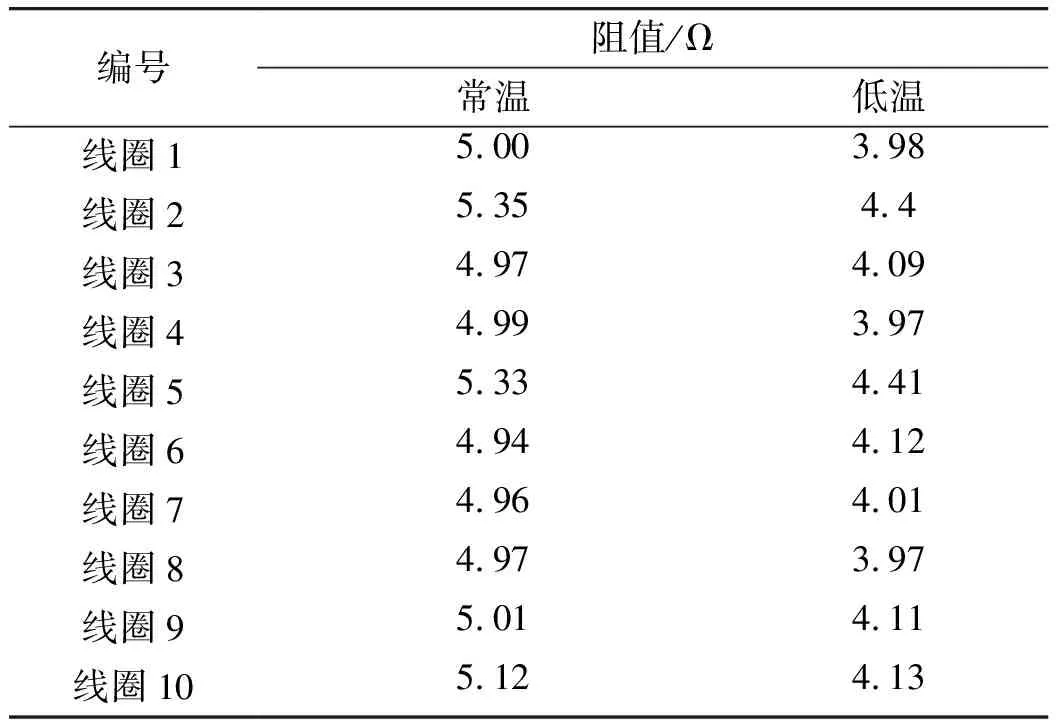
表1 线圈阻值测试统计表
3 低温特性的补偿
3.1 补偿方法
通过对激光导引头低温输出特性的分析,对低温下衰减的原因进行了确认,由于上述主要影响因素均为固化属性,因此对输出角速度的补偿环节设置就更为重要。针对激光导引头单位角速度需要保持的精度,设置了两个调整环节,分别为常温调整系数K1(用来常温调试使输出角速度的偏差尽可能小),低温调整系数K2(用于补偿低温条件的衰减量),原理框图如图5所示,可以对比低温程序和低温条件下开启自动温度补偿功能执行常温程序运行的结果[5]。根据图5,为了便于输出角速度的调整,系数的装定均采用软件写入的补偿方法,操作简单易实现。

图5 补偿方法原理框图
根据工作原理,当导引头自身修正回路跟踪能力较强时,常温系数K1则不需太高即可满足技术指标,低温补偿系数也就不需太高;当导引头自身回路跟踪能力较弱时,则常温系数较高时才能达到要求,此时低温系数也需要较高的补偿才能满足技术指标。那么,对于批量产品来说,在低温工作条件下的补偿则应遵循以上工作原理,且需满足一定的离散性要求,因此按照5%精度进行分段补偿(低温系数K2补偿方法见式(2)),这样低温系数能够兼容自身跟踪能力的不同以适应批量调试的需求。
(2)
3.2 试验验证
为了验证上述低温特性补偿方法的有效性,随机选取30具产品进行摸底试验,按照式(2)对产品跟踪角速度进行了调整和测试,测试结果如图6、图7所示,结果证明该补偿方法能够使低温输出视线角速度精度控制在±15%以内。
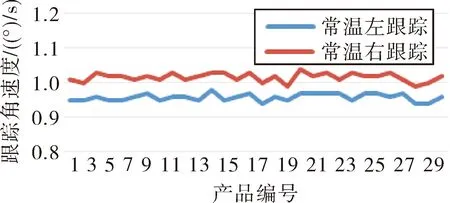
图6 验证测试结果常温统计图
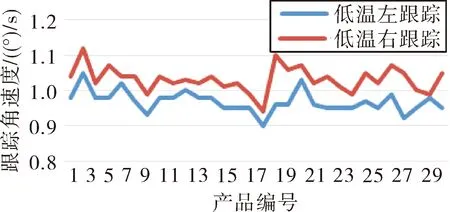
图7 验证测试结果低温统计图
4 补偿方法的应用
通过以上对补偿方法的验证,输出精度调试合格率基本满足了批量生产需求,避免了反复调试,节省了生产成本,创造了生产效益。其中,试用批产品的常温系数K1、低温系数K2统计如图8所示,基本符合式(2)的低温补偿方法;低温系数分布如图9所示,说明采用该低温补偿方法一次调试合格率可达到90.6%。
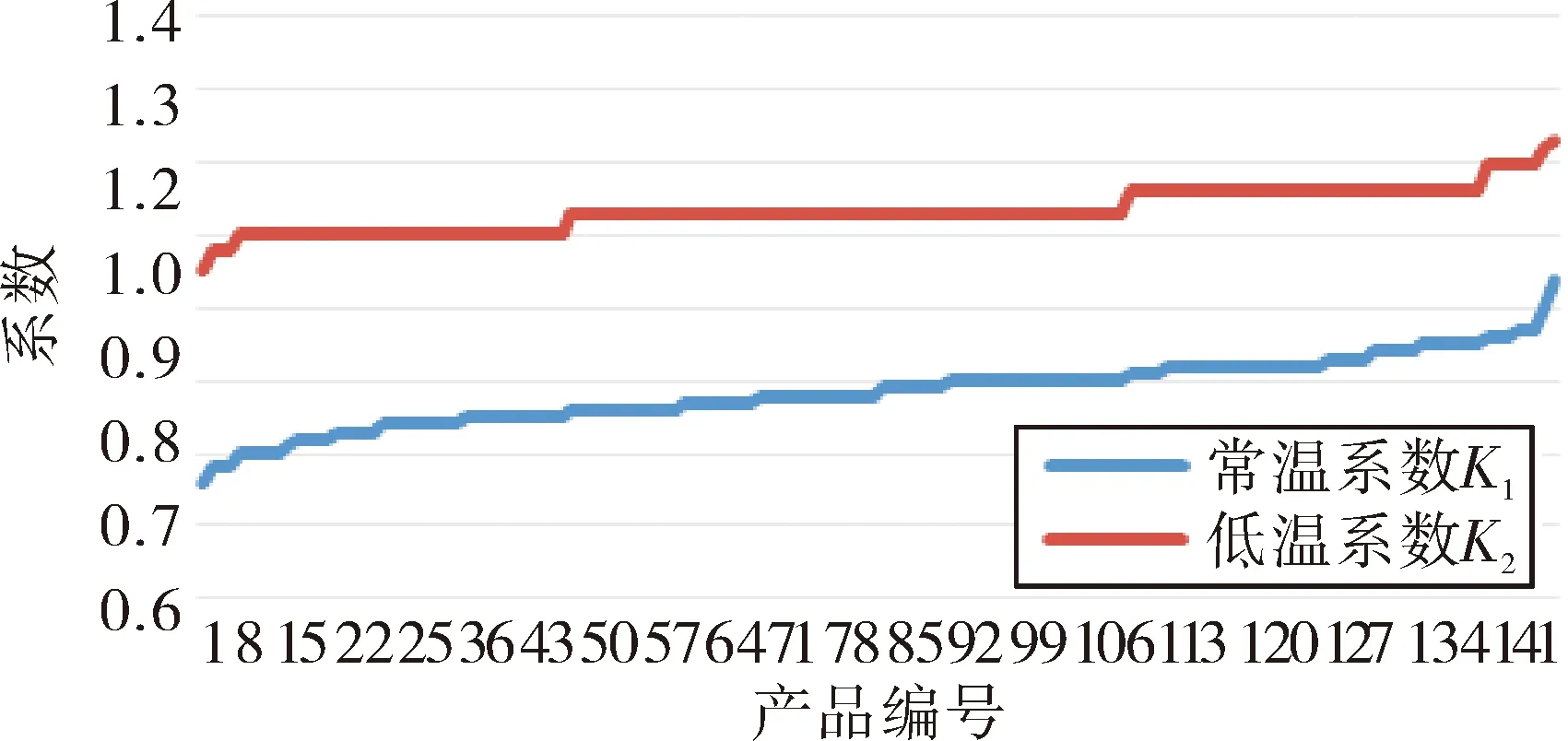
图8 批量生产调试系数统计图

图9 批量生产验证低温系数K2分布图
5 结论
分析激光导引头低温跟踪角速度输出离散及精度降低是固化属性,不能由调试或装配的方式改变,但可通过设置温度补偿参数保证全温条件下的输出精度。通过在产品调试过程中应用低温分段补偿方法,使导引头一次总调合格率达到90%以上。综上分析,该方法具备以下3个优点,可供其他激光类导引头的调试借鉴:
1)低温补偿系数独立,保证低温性能的同时避免对常温性能造成影响;
2)采用分段补偿方法可应用于批量产品的调试生产;
3)补偿操作简单,在记录常温系数K1的条件下,按分段系数表进行低温系数K2的承装即可。
