导引头跟踪回路滤波特性仿真分析
2019-12-24吴玉生
吴玉生,李 杰
(1.中国华阴兵器试验中心,陕西 华阴 714200; 2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
反辐射武器是对敌方雷达等辐射源进行打击摧毁的精确制导武器,得到了各国的广泛重视[1-2]。反辐射导引头是反辐射武器的重要组成部分,它的作用是跟踪目标并提供反辐射武器所需的制导信息[3-4]。为了消除弹体扰动对目标跟踪的影响,反辐射导引头大多采用陀螺稳定平台随动系统[5-6]。陀螺稳定平台随动系统分为预定回路、稳定回路、跟踪回路3个回路,在这3个回路中,导引头跟踪回路的性能对视线角速度的输出有着至关重要的影响[7-8]。而在末段寻的制导中,比例导引(或扩展比例导引)是目前采用最多的制导律,其中惯性视线角速度信息是实现比例导引最为重要的制导信息[9-10]。
在跟踪回路中由于平台的随机扰动和导引头测向噪声的影响,会导致导引头输出性能变差,一般会进行跟踪回路滤波,因此需要分析导引头跟踪回路滤波对输出特性的影响,以得到满足平台要求的视线角速度信息。Matlab中的Simulink工具是对跟踪回路性能进行仿真的一种重要手段[11-12]。文献[13]仿真了信号处理延迟大小对随动系统带宽的影响,文献[14] 仿真了采用低通滤波器对角速度输出的影响,文献[15]仿真了采用Kalman滤波器对角跟踪回路输出的影响。
惯性环节滤波器和矩形窗平均值滤波器是数字滤波主要采用的2种滤波器[16-17]。本文利用Matlab中的Simulink工具,对导引头跟踪回路采用惯性环节滤波器和矩形窗平均值滤波器的特性进行了仿真,验证了不同滤波情况下的时域和频域特性,比较了2种滤波方法的差异,给出了适用于工程的滤波方法选择依据。
1 系统原理
反辐射导引头由天线、接收机和伺服控制系统等组成。失调角定义为视线与天线电轴之间的夹角,天线和接收机测量失调角偏航分量和俯仰分量。伺服控制系统通过驱动框架转动,调整天线指向,减小失调角,不断使天线向视线靠近,从而达到跟踪目标的目的,同时利用速率陀螺反馈构成的稳定回路实现对机体扰动的隔离。
干涉仪测向是导引头常用的一种测向方法[18]。根据反辐射导引头测向特性、瞬时视场、最大跟踪角速率和框架角范围等属性建立反辐射导引头功能模型,如图1所示。

图1 导引头功能模型

2 跟踪回路特性分析
2.1 跟踪回路时域特性分析
设定反辐射导引头失调角测量延迟时间为5 ms,测量周期为20 ms,跟踪回路控制增益为8。角速度为1°/s,机体扰动幅值为50°/s、频率为2 Hz,进行计算机仿真,图2(a)仿真了角速度为1°/s时的目标视线角速度超调响应曲线,图2(b) 仿真了机体扰动幅值为50°/s、频率为2 Hz时的隔离度曲线,图2(c)仿真了失调角测量噪声均方差为0.03°时的角速度输出曲线。
通过数字仿真,得到导引头跟踪回路的时域特性为:
① 超调量为0;
② 隔离度为2.1%;
③ 目标视线角速度均值为0.03°/s,均方差为0.24°/s。

图2 导引头输出曲线
2.2 跟踪回路时域特性分析
将导引头失调角测量的延迟环节和零阶保持器进行线性化,形式如下:
式中,τ为失调角测量的延迟时间,T为失调角测量周期。
导引头跟踪回路开环频域特性曲线如图3(a)所示,闭环频域特性曲线如图3(b)所示。
由图3可知导引头跟踪回路的频域特性为:
① 开环截止频率为8.03 rad/s;
② 幅值裕度为19.7 dB,相位裕度为83.5°;
③ 闭环带宽为7.15 rad/s(45°相位滞后)。

图3 跟踪回路频域特性曲线
3 跟踪回路滤波
3.1 常用滤波算法
跟踪回路内滤波的主要方法是惯性环节滤波器和矩形窗平均值滤波器。
时间常数为τ的一阶惯性环节滤波器形式为:
离散化之后形式为:
式中,T为采样周期,τ为一阶惯性环节时间常数。
矩形窗平均值滤波器的传递函数为:
式中,N为矩形窗平均值滤波器阶数。
3.2 导引头跟踪回路时域特性分析
惯性环节滤波器中τ取50 ms,矩形窗平均值滤波器阶数采用6阶,导引头输出经过2种滤波后的角速度超调曲线如图4(a)所示,隔离度曲线如图4(b)所示,角速度滤波曲线如图4(c)所示。
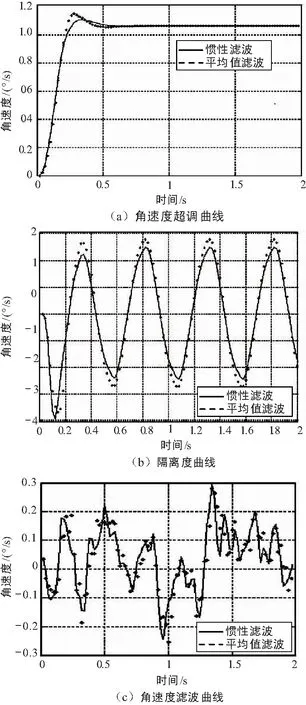
图4 目标视线角速度输出曲线
通过数字仿真,得到导引头采用2种滤波器的跟踪回路的时域特性为:
① 采用惯性环节滤波器目标视线角速度阶跃响应超调量约为4.1%,采用六阶矩形窗平均值滤波器超调量约为7.8%;
② 采用惯性环节滤波器隔离度为2.47%,采用六阶矩形窗平均值滤波器隔离度为2.76%;
③ 采用惯性环节滤波器目标视线角速度均值为0.035°/s,均方差为0.11°/s,采用六阶矩形窗平均值滤波器目标视线角速度均值为0.035°/s,均方差为0.111°/s。
3.3 跟踪回路频域特性分析
导引头跟踪回路采用惯性环节滤波器时,跟踪回路开环和闭环频域特性曲线分别如图5(a)和图5(b)所示。

图5 跟踪回路频域特性曲线(惯性环节滤波器)
导引头跟踪回路采用六阶矩形窗平均值滤波器时,频域特性曲线分别如图6(a)和图6(b)所示。
通过数字仿真,得到导引头采用2种滤波器的跟踪回路的频域特性为:
① 采用惯性环节滤波器的相位裕度约63°,幅值裕度约17.6 dB,闭环带宽约6 rad/s;
② 采用六阶矩形窗平均值滤波器的幅值裕度约26.7 dB,闭环带宽约6 rad/s。
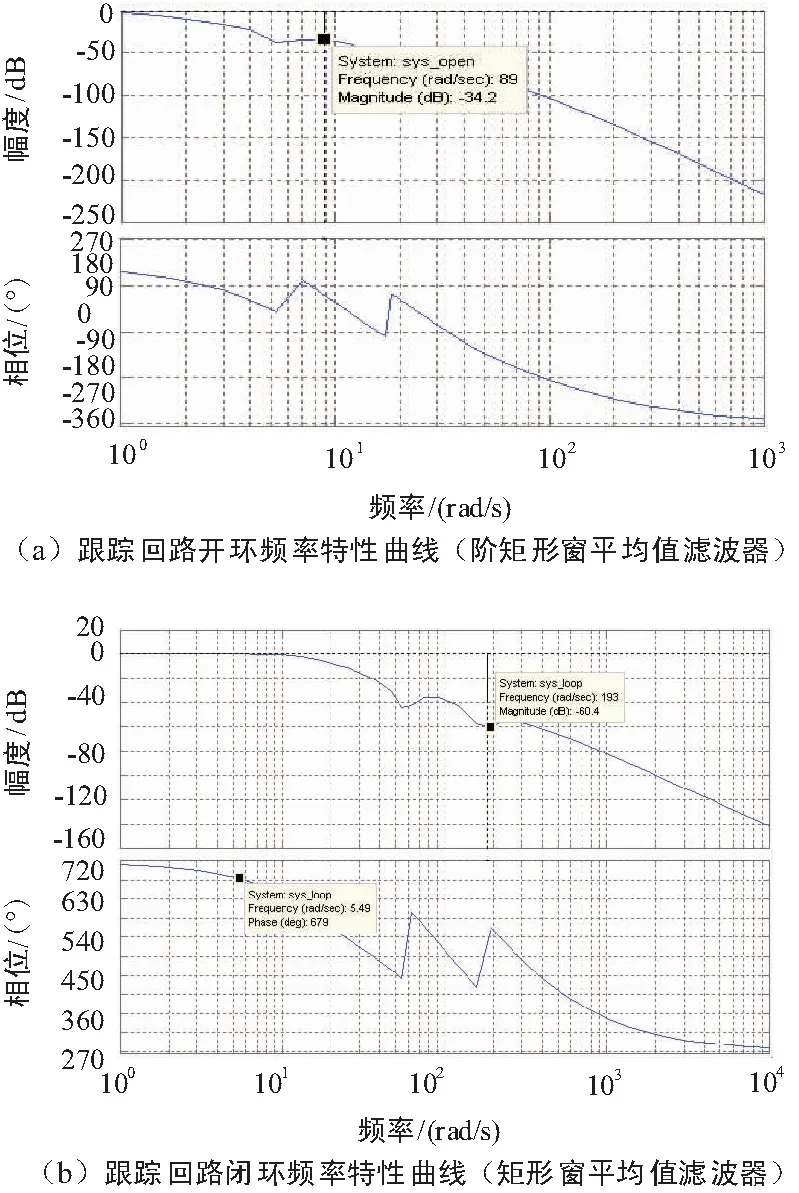
图6 跟踪回路频域特性曲线(六阶矩形窗平均值滤波器)
3.4 跟踪回路滤波特性分析
对跟踪回路采用2种滤波方法,分别考察时域和频域上的差异,得出如下结论:
① 2种滤波方法都可以有效降低测角噪声对目标视线角速度的影响,且效果较为接近;
② 采用惯性环节滤波器时域响应更好一些,目标视线角速度阶跃响应超调量和隔离度均优于采用六阶矩形窗平均值滤波器,但隔离度均较不采用滤波器时略为恶化;
③ 六阶矩形窗平均值滤波器开环频域响应更好一些,闭环频率响应接近,闭环带宽均较不加滤波器略为降低。
4 结束语
本文对导引头跟踪回路的原理进行了论述,对跟踪回路特性进行了仿真,并对采用惯性环节滤波器和六阶矩形窗平均值滤波器的跟踪回路时域和频域特性进行了仿真,仿真结果表明采用2种滤波器都可以有效地减小测向噪声对角速度输出的影响,但跟踪回路闭环带宽略为降低,角跟踪回路采用惯性环节滤波器时的角速度超调量和隔离度均优于采用六阶矩形窗平均值滤波器。因此可考虑采用惯性环节滤波器对角跟踪回路进行滤波。
