基于三维激光扫描技术的隧道断面线提取方法研究
2019-12-23范炜
范 炜
(安徽省芜湖县自然资源和规划局,安徽 芜湖 241100)
三维激光扫描技术是一种非接触快速主动获取三维空间信息的技术,不受天气影响24 h作业,每秒钟能够获取至少几十万上百万个点云数据,由于其作业效率高,因此在诸多领域有着广泛应用[1]。隧道变形监测一直是隧道及地下工程险情预警的重要手段,三维激光扫描技术能够高效获取隧道高精度点云数据,有效解决了隧道传统测量工作量大、效率低、特征数据少、成本高等问题。
断面线提取一直是隧道变形监测的重要内容,如何能高精度提取隧道断面线信息一直是隧道变形检测的重要内容,常规的断面线提取方法一般有两种,一种是全站仪观测,将观测数据导入CASS等软件绘制断面线,这种方法最大局限性在于全站仪测量数据有限,只能获取少量特征数据,因此整体精度不高[2-3]。而目前使用三维激光扫描仪提取断面线方法主要是对点云切片,通过切片方式拟合断面线,但是这种方法忽视了点云缺失情况,在隧道内壁常附着大量水渍,这些水渍会导致隧道点云部分缺失[4],同样影响整体精度。本文提出一种针对点云数据构建三角网拟合高精度三维模型,在点云缺失模型无法拟合区域进行孔洞修补,最后借助polyworks软件采用模型快速自动提取连续断面线的方法。
1 点云数据采集与预处理
本次项目实例验证为某穿山隧道,隧道上方为山体,山体以岩石为主,局部为土质山体,坡度较大,因此极易发生自然灾害,对山体下方穿山隧道有一定影响,本次主要是采集隧道断面线数据,根据断面线数据与已有的设计数据对比,从而分析隧道变形情况。
外业进行点云数据采集时首先要进行踏勘选点,以确定设站次数、靶球的位置等,从而制定最优的数据采集方案[5]。扫描站点的布设时,需要考虑到扫描仪的最佳数据采集范围,以保证在合理的范围内都能获取高精度的点云数据。此外,相邻两站还应保证足够的重叠区域,以方便后期重叠区域的数据拼接。如果点云数据要转换到绝对坐标系下,要考虑到控制点位置问题,控制点要均匀分布在待测目标附近,以提高转换精度。地面三维激光扫描仪外业数据采集时最主要考虑到标靶和目标物的遮挡,由于后期点云数据处理时两个测站间至少需要3个公共靶标,因此,每站数据采集时需要考虑到靶标是否完全被至少两个测站采集到[6]。外业点云数据采集如图1所示。

图1 外业点云数据采集
外业数据采集的原始数据需要进行预处理操作,包括点云配准-分割-去噪-精简等操作,配准主要是将不同视角点云数据转换到统一坐标系下,分割的目的是为了获取目标物数据,去噪是为了去除行人、车辆、飞鸟等外业干扰的点云数据,点云精简是为了提高后续点云处理分析效率。预处理后的点云数据如图2所示。
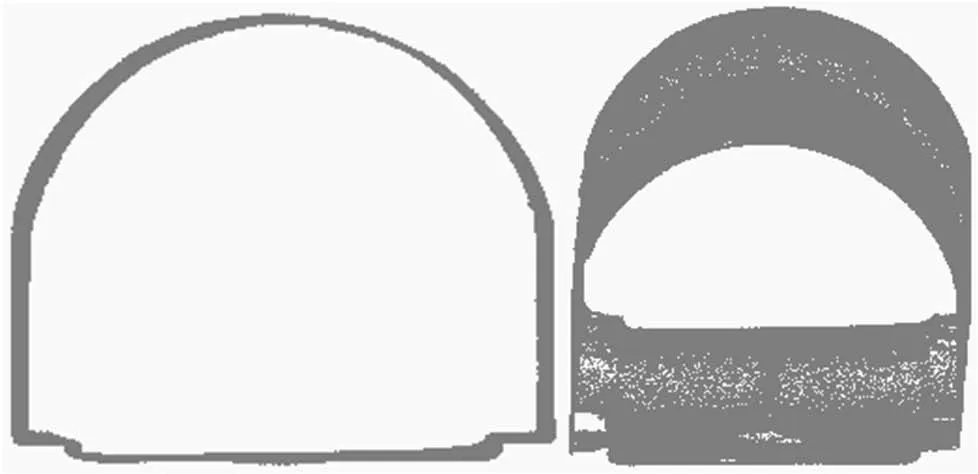
图2 预处理后的点云数据
2 三维模型重建及孔洞修补
将预处理后的点云数据首先构建三角网,构建三角网的方法选择Delaunay算法,通过三角网构建三维模型有助于判断隧道点云的完整性,是绘制断面线进行后续分析的基础。首先,初始化临时边集、临时三角形集以及三角形集合,构建一个超级三角形,将所有点都包含其中;其次,游离所有的点进行判断,它是否在临时三角形内,如果在临时三角形右边,则将这个临时三角形移动到三角形集合中,如果在内部则删除该三角形,同时将其的三条边移动到临时边集合中;然后,将点与所有临时边集合构成的三角网放入临时三角形集合中,返回步骤2直到所有点遍历结束;最后,得到三角网集合即Delaunay三角网。三角网精度和点密度有关,传统测量仪器如全站仪和RTK,平均点间距都是以米为单位,而以三维激光扫描获取的点云数据,相邻点间距都是以毫米为单位,因此,构建三角网模型,三维激光扫描技术更有优势。根据隧道点云构建三维模型如图3所示。

图3 根据隧道点云构建三维模型
根据点云数据生成的隧道模型整体效果较好,但是通过模型细节可以看到由于野外采集遮挡导致部分点云缺失,因此,构建的三维模型出现一些孔洞,这些孔洞的存在容易导致断面线提取时不连续的情况,这样的断面线不符合测绘规范,因此在使用三维模型提取断面线时,还需要对空洞进行填补,首先找到三维模型当中所有的孔洞,对于每一个孔洞,找出其所有的半边然后对其进行排序;对排序过的所有的半边,找到角度最小的两条边,增加第三条边,形成新的三角面片,如此迭代完成所有孔洞修补。模型孔洞如图4所示。
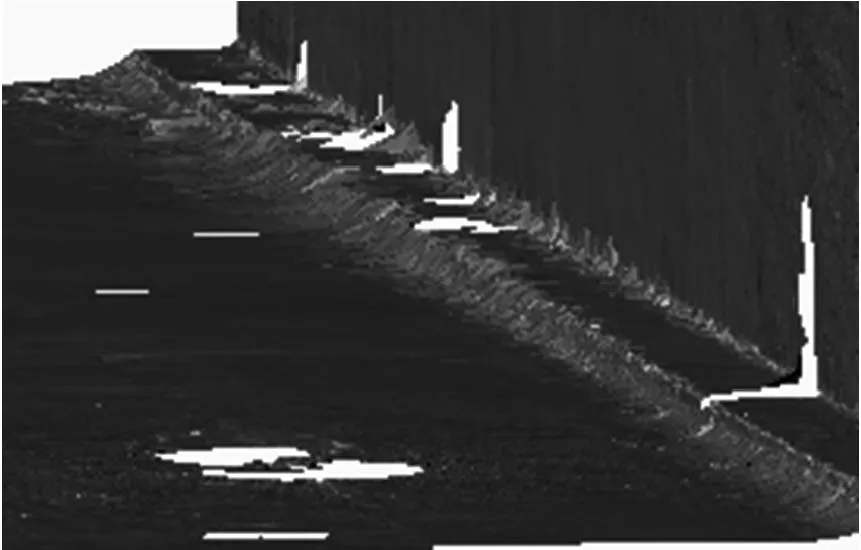
图4 模型孔洞
为修补模型孔洞,将生成的三维模型导出为.obj格式,由于geomagic studio软件有模型空洞修补功能,将.obj格式三维模型导入到该软件中,设置好模型修复方式,进行模型孔洞修补,修补效果如图5所示。
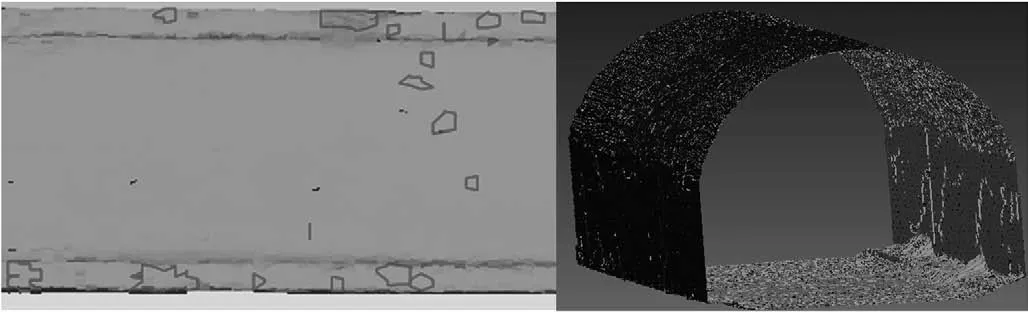
图5 模型孔洞修补
深色标记部分为空洞缺失区域,通过图5可以看出空洞基本都已填补完整。
3 隧道断面线生成
隧道断面线生成需要借助polyworks软件,polyworks软件是一款能处理点云和模型软件,常应用于3D扫描、逆向工程和检测、设计等领域,是一款点云检测和硬探测为一体的混合测量软件。完成隧道模型孔洞修补后,将模型导入到polyworks软件中,设置断面线起始位置和间距,主要是针对设置好的间距进行三维点云的平板分割,每次只能分割出一个平面,再根据切片好的点云数据,使用B样条进行点云曲线拟合,首先主元素分析法PCA初始化B样条曲线,然后拟合B样条曲线,之后循环初始化B样条曲线,最后拟合B样条曲线,可以自动生成断面线,效果如图6所示。

图6 断面线效果图
将生成的断面线输出为.dwg格式,可以测量断面测点的横距和高差,通过两项测量数据与设计尺寸对比,方便对隧道变形情况进行检查。此外,还可以直接在.dwg断面线中提取中线点坐标,转换为.dat格式,展点到CASS软件中,连接线后可作为横断面划分依据。
4 结语
本文针对三维激光扫描技术对隧道断面线提取进行研究,针对传统点云切片拟合断面线出现缺失、不连续问题,将点云先建立三维模型,并对三维模型进行孔洞修补,再根据填补完孔洞的三维模型进行断面线提取,提取效率高自动化程度强,在时间和经济成本以及成果精度上都有良好效果。
